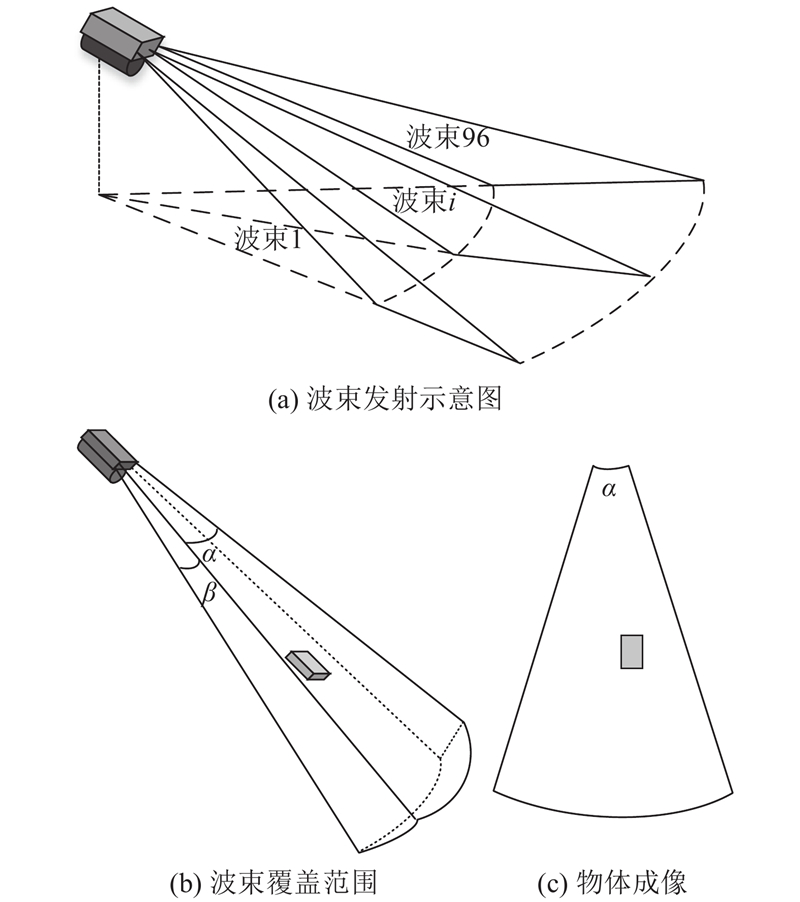
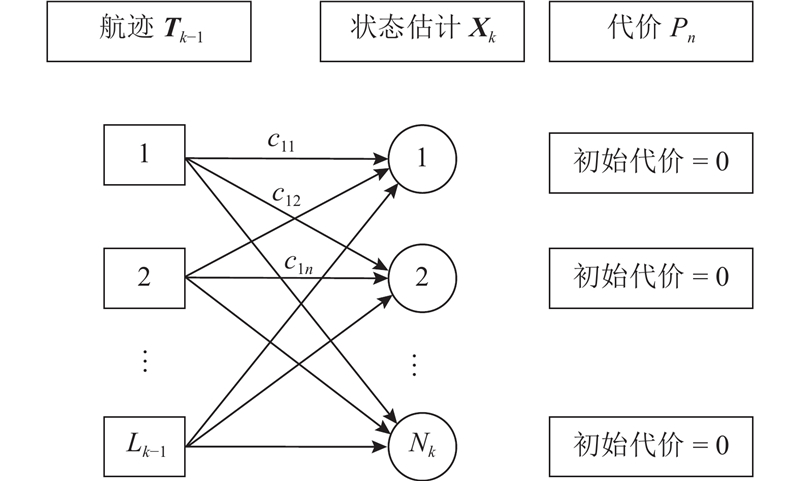
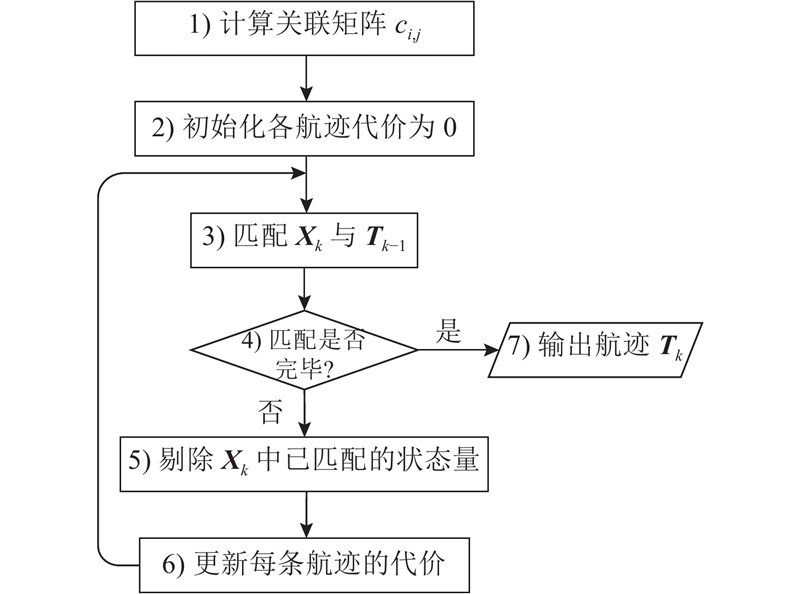
An efficient target tracking algorithm based on an imaging sonar was proposed to solve the problem of underwater multi-target tracking. The echo signal model based on signal intensity was established for each pixel point in the acoustic image according to the imaging features of the sonar in order to extract the individual target from the images. The sequential Monte Carlo probability hypothesis density (SMCPHD) filtering was applied to the target states. The Auction track recognition algorithm was used to associate the filtered target states with the identified tracks, so that the multi-target tracking was realized. The simulation analysis of the algorithm showed that the proposed method was more efficient than the multi-target tracking algorithms based on data correlation, eg. joint probabilistic data association (JPDA) and multiple hypothesis tracking (MHT). A field experiment was conducted to collect the sonar data. The tracking trajectories of all the targets were obtained after the target extraction and tracking.
Fig.2Schematic diagram of track recognition algorithm
Fig.3Flow chart of track recognition algorithm
目标
起始位置/m
初始速度/(m?s?1)
出现时间/s
消失时间/s
目标1
(0, 0)
(3, ?3)
1
20
目标2
(20, 30)
(3, ?3)
15
40
目标3
(30, ?40)
(3, 3)
35
50
Tab.1Motion parameters of targets
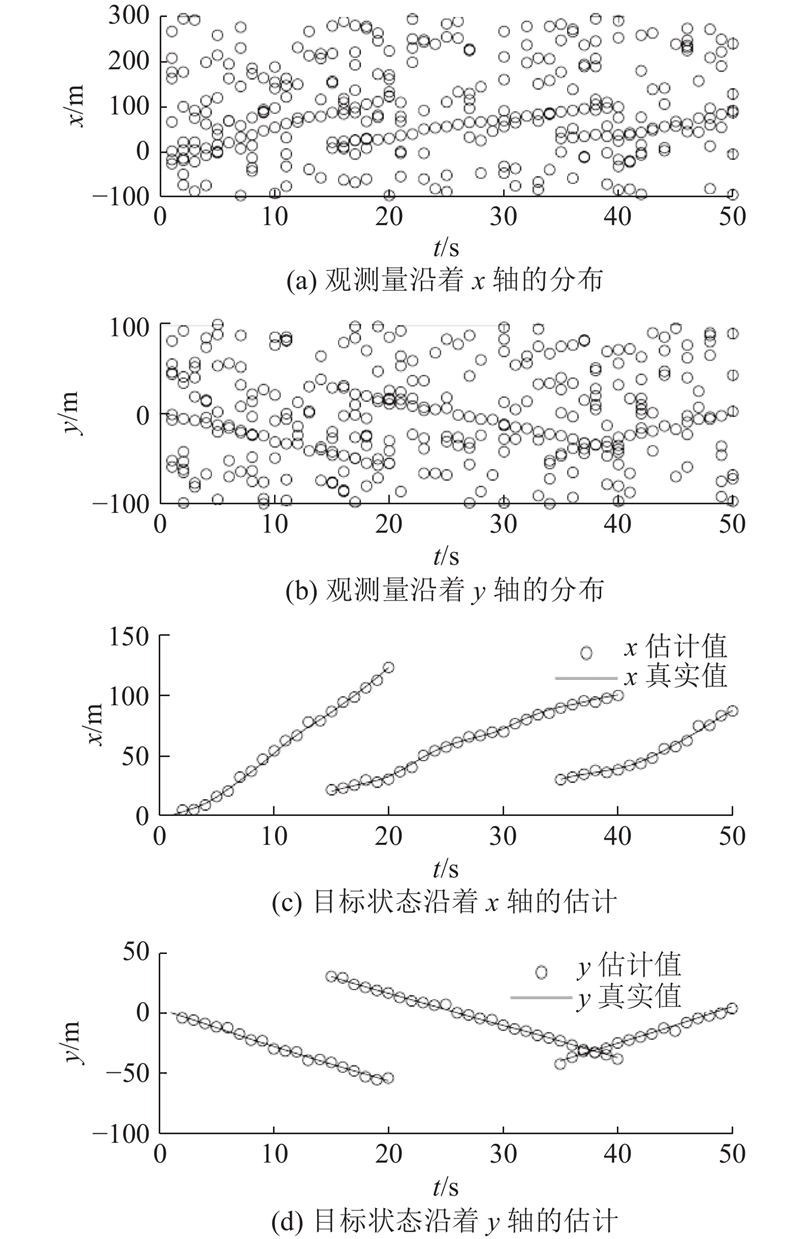
Fig.4Targets tracking along x-axis and y-axis
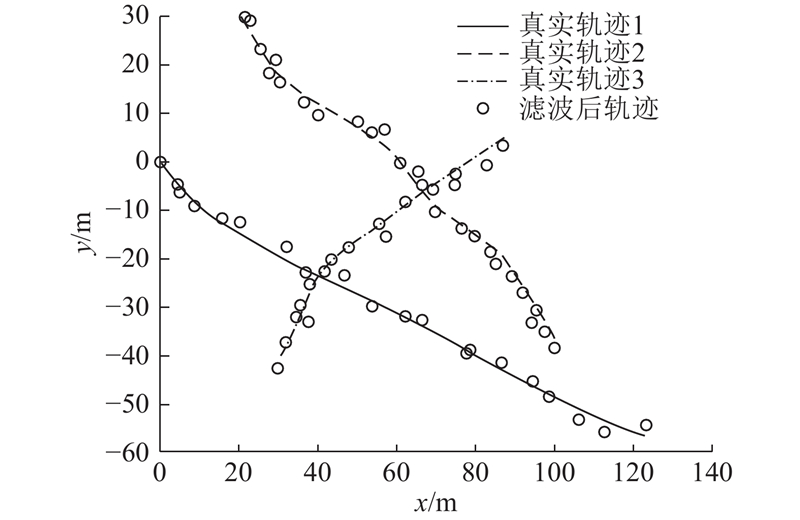
Fig.5Results of SMCPHD filtering
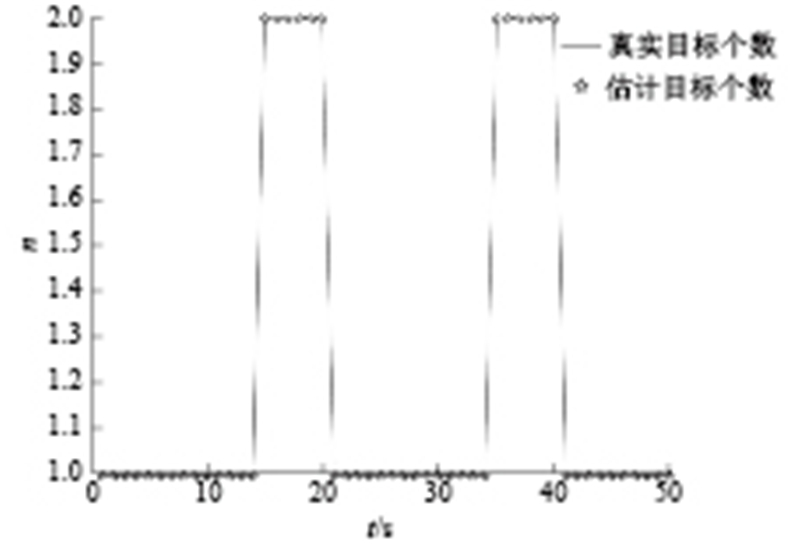
Fig.6Estimation and true value of target number
Fig.7Wasserstein distance
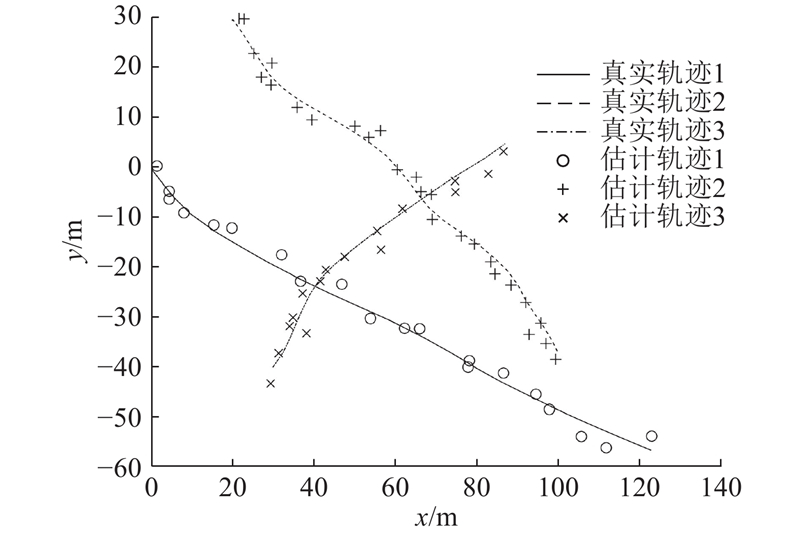
Fig.8Chart of three targets after track recognition
Fig.9Placement schematic illustration of DIDSON
参数
参数值
参数
参数值
发射频率
1.8 MHz
接收增益
20 dB
波束个数
96
声速
1 457 m/s
采样点
512
倾斜角
10°
采样频率
37.3 kHz
帧率
13帧/s
Tab.2Configuration parameters of DIDSON
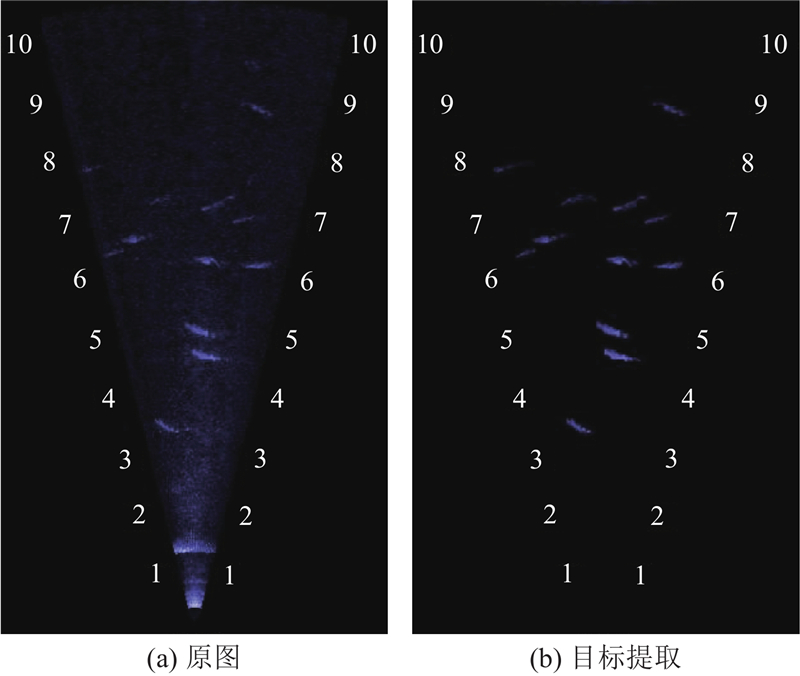
Fig.10Raw image and result of target extraction
坐标参数
t0
t1
t2
t3
t4
t5
ρ1/m
7.71
7.66
7.59
7.48
7.37
7.25
θ1/rad
1.49
1.53
1.57
1.61
1.66
1.70
ρ2/m
7.51
7.44
7.35
7.13
7.05
6.90
θ2/rad
1.51
1.57
1.59
1.61
1.64
1.66
ρ3/m
7.42
7.31
7.23
7.13
7.03
6.83
θ3/rad
1.46
1.49
1.53
1.57
1.60
1.64
ρ4/m
7.36
7.29
7.17
7.03
6.97
6.82
θ4/rad
1.45
1.47
1.51
1.56
1.59
1.63
ρ5/m
6.9
6.82
6.72
6.66
6.55
6.47
θ5/rad
1.48
1.54
1.57
1.62
1.69
1.71
ρ6/m
6.94
6.58
6.51
6.41
6.42
6.38
θ6/rad
1.44
1.49
1.52
1.57
1.64
1.72
ρ7/m
6.33
6.33
6.35
6.41
6.50
6.57
θ7/rad
1.45
1.49
1.53
1.56
1.59
1.62
ρ8/m
6.17
6.17
6.2
6.25
6.34
6.41
θ8/rad
1.44
1.49
1.51
1.55
1.58
1.60
ρ9/m
4.69
4.78
4.84
5.00
5.07
5.17
θ9/rad
1.52
1.54
1.57
1.60
1.62
1.63
ρ10/m
4.39
4.54
4.75
?
?
?
θ10/rad
1.50
1.52
1.60
?
?
?
ρ11/m
3.17
3.26
3.38
3.44
3.48
3.61
θ11/rad
1.49
1.51
1.56
1.63
1.66
1.67
Tab.3All targets’ positions obtained from sonar image
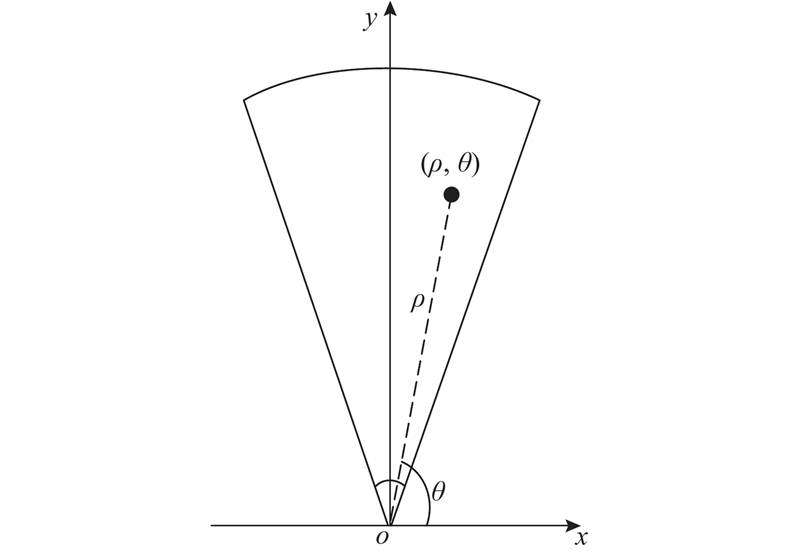
Fig.11Coordinate system for target
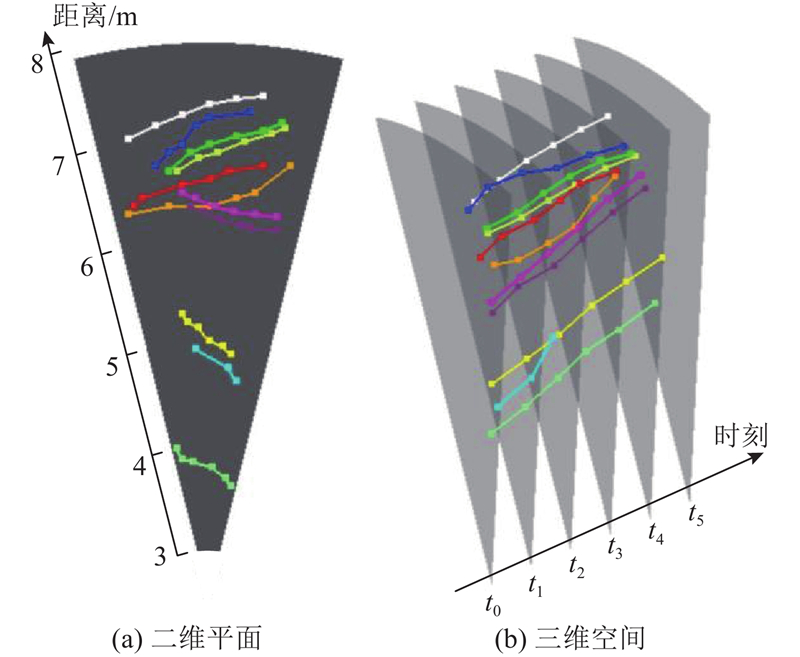
Fig.12Tracking trajectories shown in two-dimensional plane and three-dimensional space
[1]
HURT?S N, PALOMERAS N, CARRERA A, et al Autonomous detection, following and mapping of an underwater chain using sonar[J]. Ocean Engineering, 2017, 130 (1): 336- 350
[2]
CHO H, YU S Real-time sonar image enhancement for AUV-based acoustic vision[J]. Ocean Engineering, 2015, 104 (8): 568- 579
[3]
CHO H, GU J, JOE H, et al Acoustic beam profile-based rapid underwater object detection for an imaging sonar[J]. Journal of Marine Science and Technology, 2015, 20 (1): 180- 197
doi: 10.1007/s00773-014-0294-x
[4]
JING D X, HAN J, WAND X D, et al A method to estimate the abundance of fish based on dual-frequency identification sonar (DIDSON) imaging[J]. Fisheries Science, 2017, 83 (5): 685- 697
doi: 10.1007/s12562-017-1111-3
[5]
HANDEGARD N, WILLIAMS K Automated tracking of fish in trawls using the DIDSON (dual frequency identification SONar)[J]. ICES Journal of Marine Science, 2008, 65 (4): 636- 644
doi: 10.1093/icesjms/fsn029
[6]
HAN J, HONDA H, ASADA A Automated acoustic method for counting and sizing farmed fish during transfer using DIDSON[J]. Fisheries Science, 2009, 75 (1): 1359- 1367
[7]
SHAHRESTANI S, BI H, LYUBCHICH V, et al Detecting a nearshore fish parade using the adaptive resolution imaging sonar (ARIS): an automated procedure for data analysis[J]. Fisheries Research, 2017, 191 (1): 190- 199
[8]
HUANG R, HAN J, TONG J. Assessment of fishery resource of a marine ranching based on a DIDSON [C] // Oceans. Taipei: IEEE, 2014: 1–5.
[9]
徐盼麟, 韩军, 童剑锋 基于单摄像机视频的鱼类三维自动跟踪方法初探[J]. 水产学报, 2012, 36 (4): 623- 628 XU Pan-lin, HAN Jun, TONG Jian-feng Preliminary studies on an automated 3D fish tracking method based on a single video camera[J]. Journal of Fisheries of China, 2012, 36 (4): 623- 628
[10]
BELCHER E, MATSUYAMA B, TRIMBLE G. Object identification with acoustic lenses [C] // MTS/IEEE Conference and Exhibition Oceans. Honolulu: IEEE, 2001: 6–11.
[11]
BELCHER E, HANOT W, BURCH J. Dual-frequency identification sonar (DIDSON) [C] // Proceedings of 2002 International Symposium on Underwater Technology. Tokyo: IEEE, 2002: 187–192.
[12]
BAR S Y. Extension of the probabilistic data association filter in multi-target tracking [C] // Proceedings of the 5th Symposium on Nonlinear Estimation. San Diego: IEEE, 1974: 16–21.
[13]
ROECKER J A, PHILLIS G L A class of near optimal JPDA algorithms[J]. IEEE Transactions on Aerospace and Electronic Systems, 1994, 30 (2): 504- 510
doi: 10.1109/7.272272
[14]
BLACKMAN S S Multiple hypothesis tracking for multiple target tracking[J]. IEEE Aerospace and Electronic Systems Magazine, 2009, 19 (1): 5- 18
[15]
VO B N, MA W K The Gaussian mixture probability hypothesis density filter[J]. IEEE Transactions on Signal Processing, 2006, 54 (11): 4091- 4104
doi: 10.1109/TSP.2006.881190
[16]
GLOWACZ A DC motor fault analysis with the use of acoustic signals, Coiflet wavelet transform, and K-nearest neighbor classifier[J]. Archives of Acoustics, 2016, 40 (3): 321- 327