|
|
|
| Decision-making method of autonomous vehicles for right of way on road segments |
Ning-bo CAO1( ),Li-ying ZHAO2,*() ),Li-ying ZHAO2,*() |
1. College of Transportation Engineering, Chang'an University, Xi’an 710061, China
2. School of Economics and Management, Xi’an University of Technology, Xi’an 710048, China |
|
|
|
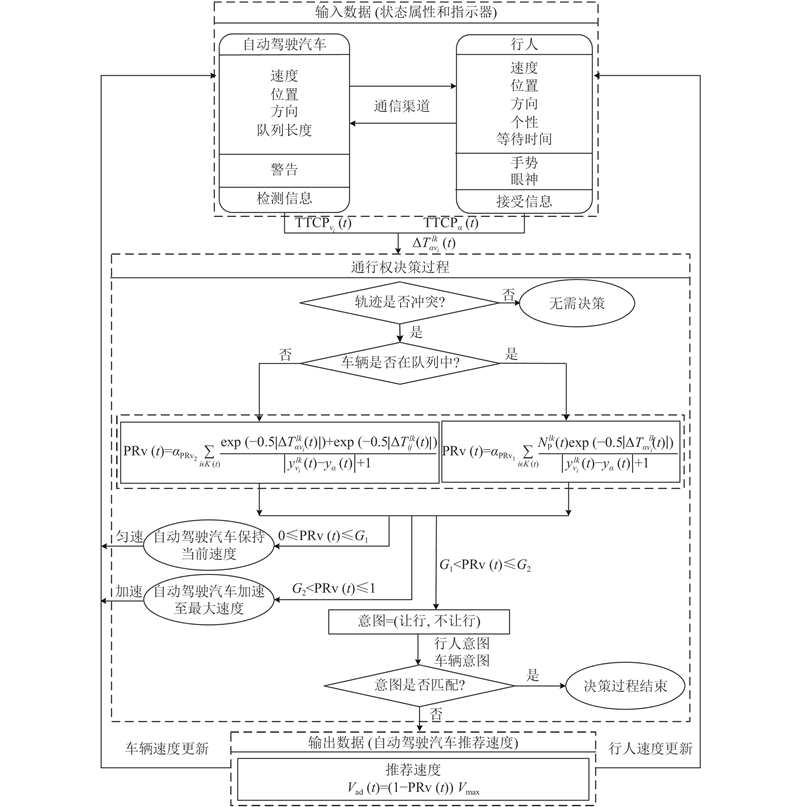
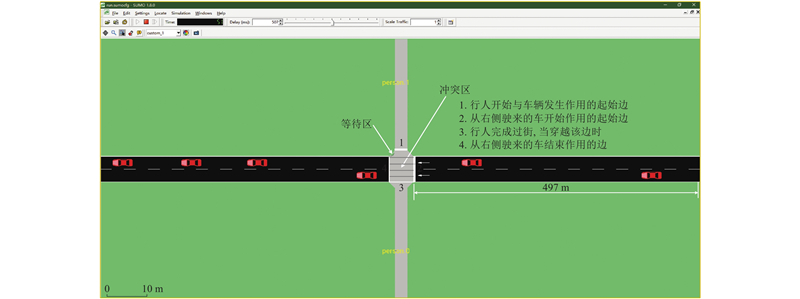
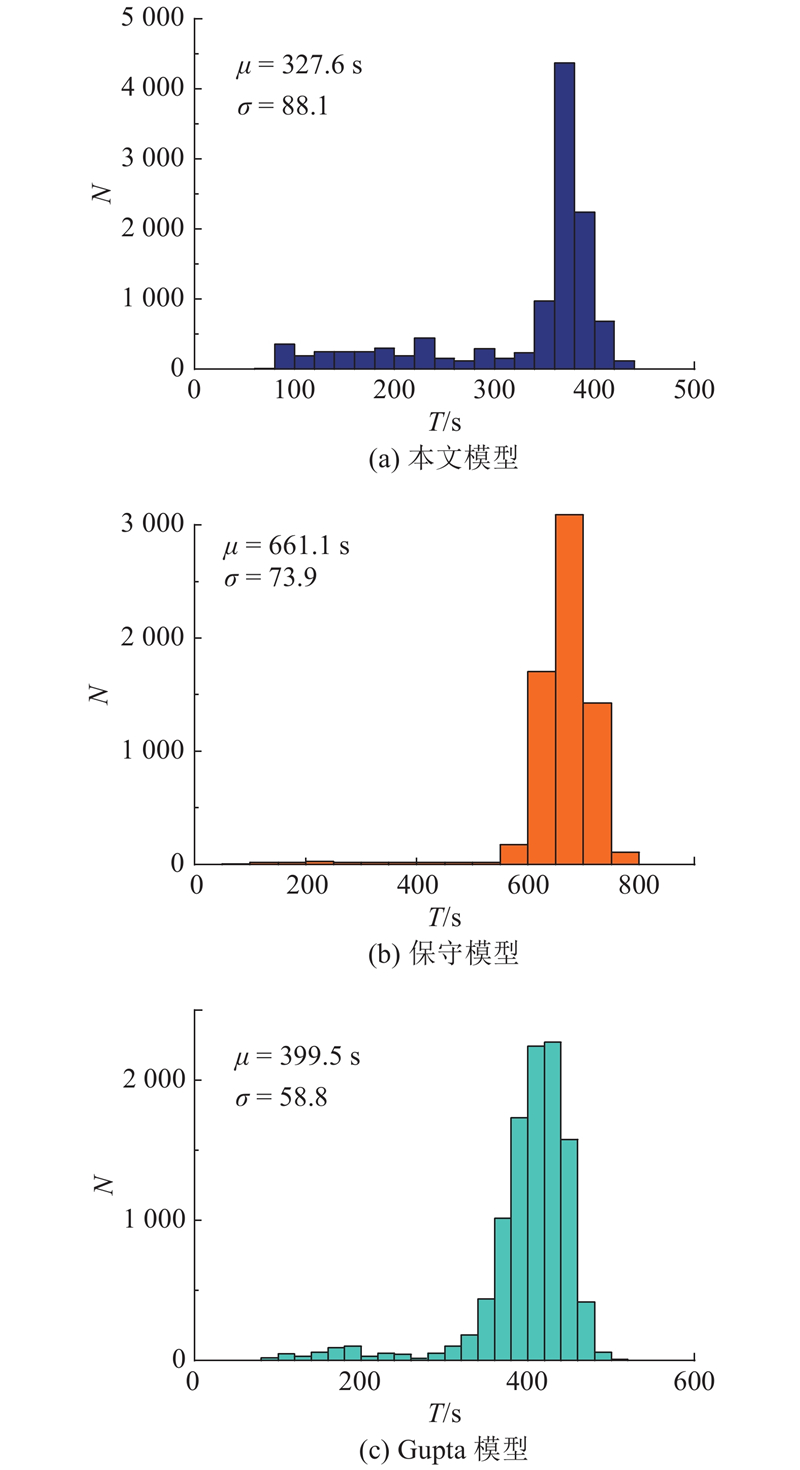
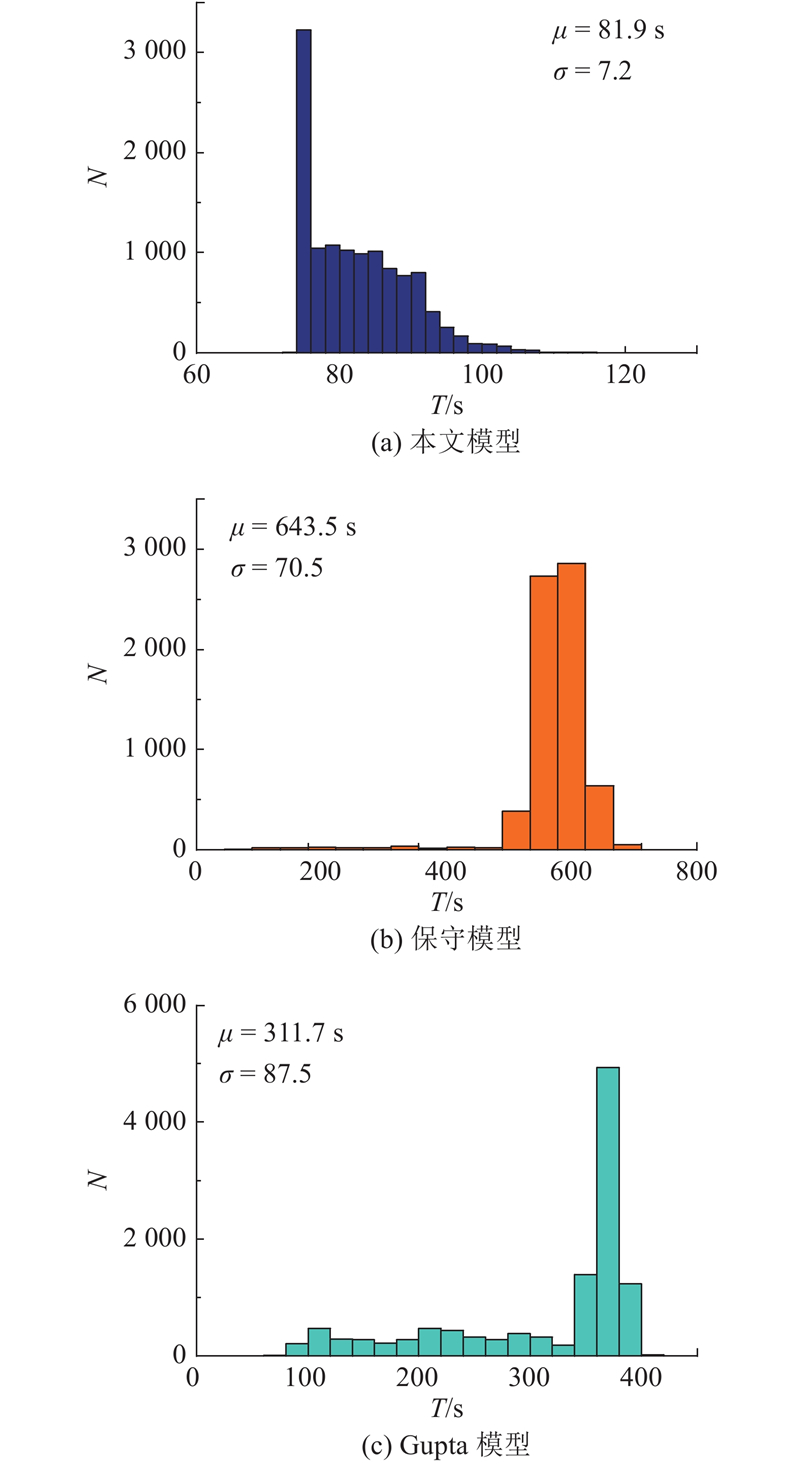
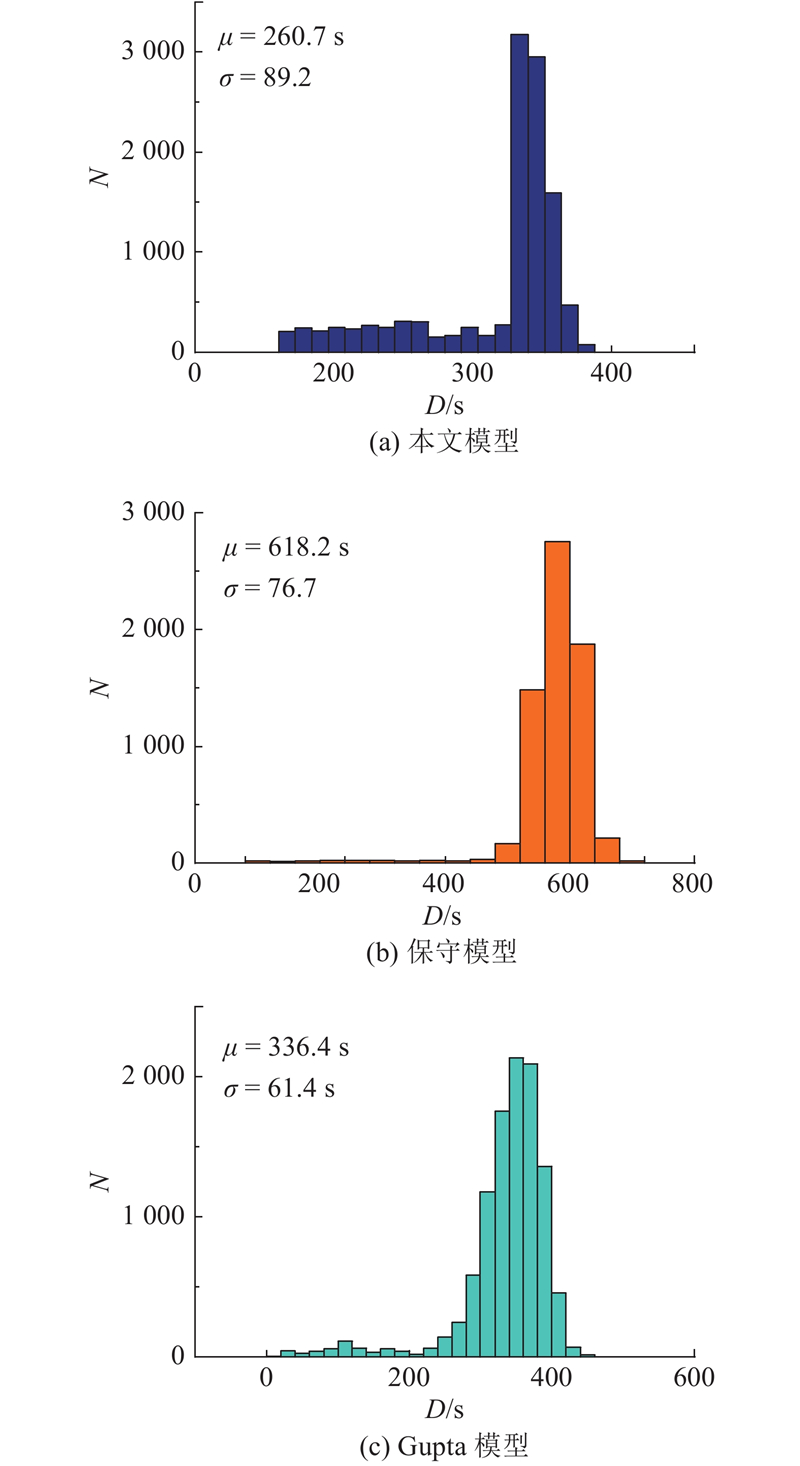
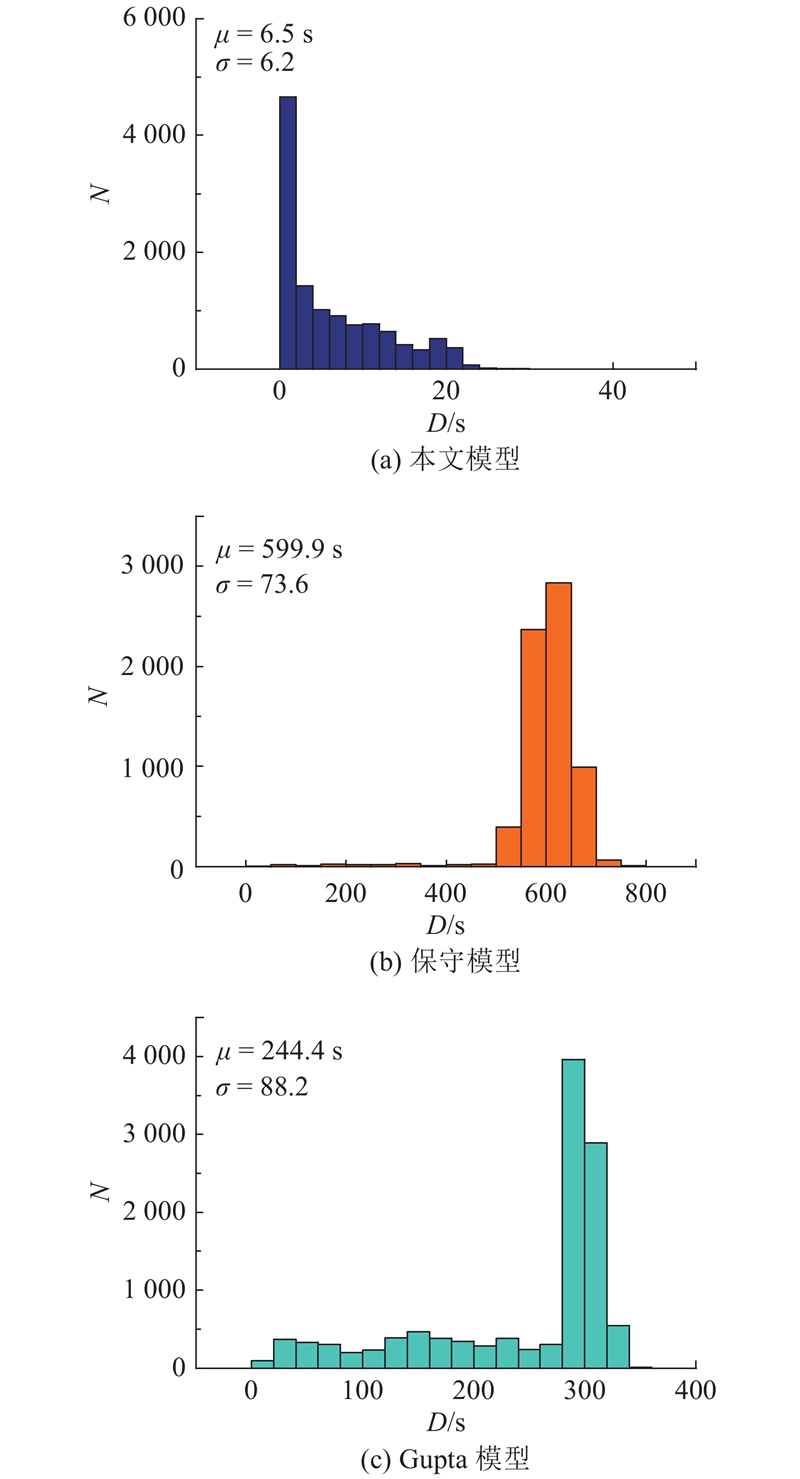
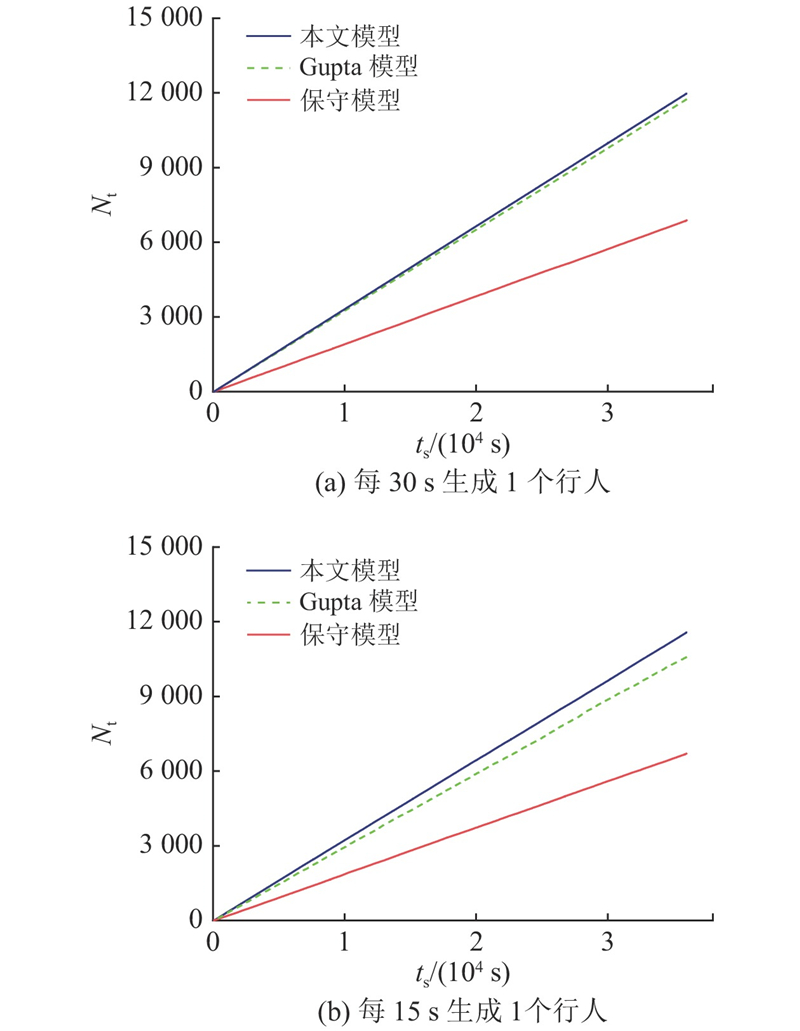
Abstract A decision-making method for the right of way based on acceptable gap model and negotiation theory was developed in order to solve the decision-making problem of autonomous vehicles for the right of way on road segments and improve the efficiency and stability of traffic flow. Various factors were comprehensively considered to model the perceived risk based on the acceptable gap model. Perceived risk was divided into low risk, medium risk and high risk. The potential behavior strategies of pedestrians and autonomous vehicles under different combinations of above factors were analyzed by comprehensively considering the impact of risk, personality (radical and conservative) and waiting time on pedestrians’ behaviors. The negotiation theory was used to model the process of decision-making for the right of way based on these behavior strategies. The model was simulated and verified by using Python and SUMO for ten hours. The simulation of three models (conservative model, Gupta model and our model) was conducted. When pedestrian generation frequency was 15 s, the average travel time of autonomous vehicles was 661.5, 399.5 and 327.6 s respectively; the average delay was 618, 336 and 260.7 s respectively; the total traffic volume was 6 699, 10 583 and 11 568 vehicles respectively. When the pedestrian generation frequency was 30 s, the average travel time of autonomous vehicles was 643.5, 311.7 and 81.9 s respectively; the average delay was 599.9, 244.4 and 6.5 s; the total traffic volume was 6 879, 11 741 and 11 971 vehicles respectively. The introduction of decision-making model helps to reduce the travel time and delay of the autonomous vehicles, and increase the traffic volume.
|
|
Received: 14 February 2021
Published: 05 January 2022
|
|
|
| Fund: 陕西省自然科学基础研究计划资助项目(2021JQ-279);陕西省教育厅重点科学研究计划资助项目(21JZ005);西安理工大学青年教师研究资助项目(256081921) |
|
Corresponding Authors:
Li-ying ZHAO
E-mail: 819868226@qq.com;lyzhao@xaut.edu.cn
|
路段环境自动驾驶汽车通行权决策方法
为了解决路段自动驾驶汽车的通行权决策问题,提高交通流的运行效率和稳定性,基于可接受间隙模型和谈判理论构建路段自动驾驶汽车通行权决策模型. 综合考虑多种因素,基于可接受间隙模型对行人风险进行建模,将行人风险划分为低风险、中风险和高风险. 综合考虑风险、性格(激进和保守)和等待时间等对行人行为的影响,分析不同因素组合下行人和自动驾驶汽车可能采取的行为策略,基于该行为策略,利用谈判理论对自动驾驶汽车的通行权决策过程进行建模. 利用Python联合SUMO开源交通仿真软件对模型进行验证,仿真持续10 h. 3个模型的(保守模型、Gupta模型和本文模型)仿真结果表明,当行人产生频率为15 s时,自动驾驶汽车的平均行驶时间分别为661.5、399.5和327.6 s,平均延误时间分别为618 s、336 s和260.7 s,总流量分别为6 699辆、10 583辆和11 568辆. 当行人产生频率为30 s时,自动驾驶汽车的平均行驶时间分别为643.5、311.7和81.9 s,平均延误时间分别为599.9、244.4和6.5 s,总流量分别为6 879辆、11 741辆和11 971辆. 通行权决策方法的加入有助于降低自动驾驶汽车的行驶时间和延误,提升流量.
关键词:
交通工程与交通管理,
自动驾驶汽车,
通行权决策,
谈判模型,
行人,
感知风险
|
|
| [1] |
AMIRNAZMIAFSHAR E, TEZCAN H O. An analysis of pedestrian waiting time at uncontrolled crosswalks using discrete choice model [C]// International Conference on Transportation and Development. Seattle: ASCE, 2020: 25-38.
|
|
|
| [2] |
ZHANG C, CHEN F, WEI Y Evaluation of pedestrian crossing behavior and safety at uncontrolled mid-block crosswalks with different numbers of lanes in China[J]. Accident Analysis and Prevention, 2019, 123: 263- 273
doi: 10.1016/j.aap.2018.12.002
|
|
|
| [3] |
LI B A model of pedestrians’ intended waiting times for street crossings at signalized intersections[J]. Transportation Research Part B: Methodological, 2013, 51: 17- 28
|
|
|
| [4] |
GUO H, WANG W, GUO W, et al Reliability analysis of pedestrian safety crossing in urban traffic environment[J]. Safety Science, 2012, 50 (4): 968- 973
doi: 10.1016/j.ssci.2011.12.027
|
|
|
| [5] |
KOH P P, WONG Y D Gap acceptance of violators at signalized pedestrian crossings[J]. Accident Analysis and Prevention, 2014, 62: 178- 185
doi: 10.1016/j.aap.2013.09.020
|
|
|
| [6] |
SOATHONG A, CHOWDHURY S, WILSON D, et al Investigating the motivation for pedestrians ’ risky crossing behaviour at urban mid-block road sections[J]. Travel Behaviour and Society, 2021, 22: 155- 165
doi: 10.1016/j.tbs.2020.09.005
|
|
|
| [7] |
MERLINO S, MONDADA L Crossing the street: how pedestrians interact with cars[J]. Language and Communication, 2019, 65: 131- 147
doi: 10.1016/j.langcom.2018.04.004
|
|
|
| [8] |
BREMNER P, LEONARDS U. Iconic gestures for robot avatars, recognition and integration with speech [EB/OL]. (2016-02-17)[2021-02-14]. https://www.frontiersin.org/articles/10.3389/fpsyg.2016.00183/full.
|
|
|
| [9] |
CHEN H, COHEN R, DAUTENHAHN K, et al. Autonomous vehicle visual signals for pedestrians: experiments and design recommendations [C]// 2020 IEEE Intelligent Vehicles Symposium. Las Vegas: IEEE, 2020: 1819-1826.
|
|
|
| [10] |
KIM K, KIM Y, KIM H, et al. Method and device for signaling present driving intention of autonomous vehicle to humans by using various V2X-enabled application: U. S. 10780897 [P]. 2020-09-22.
|
|
|
| [11] |
THADESHWAR H, SHAH V, JAIN M, et al. Artificial intelligence based self-driving car [C]// 2020 4th International Conference on Computer, Communication and Signal Processing. Chennai, India: IEEE, 2020: 1-5.
|
|
|
| [12] |
LUETGE C The German ethics code for automated and connected driving[J]. Philosophy and Technology, 2017, 30 (4): 547- 558
doi: 10.1007/s13347-017-0284-0
|
|
|
| [13] |
SATHYAMOORTHY A J, LIANG J, PATEL U, et al. Densecavoid: real-time navigation in dense crowds using anticipatory behaviors [C]// 2020 IEEE International Conference on Robotics and Automation. Paris: IEEE, 2020: 11345-11352.
|
|
|
| [14] |
SCHNEIDER R J, SANDERS R L Pedestrian safety practitioners’ perspectives of driver yielding behavior across North America[J]. Transportation Research Record, 2015, 2519 (1): 39- 50
doi: 10.3141/2519-05
|
|
|
| [15] |
MARCHANT G E, LINDOR R A The coming collision between autonomous vehicles and the liability system[J]. Santa Clara Law Review, 2012, 52: 1321
|
|
|
| [16] |
GONG S Y, DU L Cooperative platoon control for a mixed traffic flow including human drive vehicles and connected and autonomous vehicles[J]. Transportation Research Part B:Methodological, 2018, 116: 25- 61
doi: 10.1016/j.trb.2018.07.005
|
|
|
| [17] |
BREWER M A, FITZPATRICK K, WHITACRE J A, et al Exploration of pedestrian gap-acceptance behavior at selected locations[J]. Transportation Research Record, 2006, 1982 (1): 132- 140
doi: 10.1177/0361198106198200117
|
|
|
| [18] |
CHEN P, ZENG W, YU G Assessing right-turning vehicle-pedestrian conflicts at intersections using an integrated microscopic simulation model[J]. Accident Analysis and Prevention, 2019, 129: 211- 224
doi: 10.1016/j.aap.2019.05.018
|
|
|
| [19] |
LI L, WEN D, YAO D A survey of traffic control with vehicular communications[J]. IEEE Transactions on Intelligent Transportation Systems, 2013, 15 (1): 425- 432
|
|
|
| [20] |
TANYA A, AZETA C Negotiation theory and practice: a review of the literature[J]. Fao Policy Learn. Programme, Easypol-Module, 2008, 179: 6- 16
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|