|
|
|
| Stiffness modeling and structure optimization of heavy-duty intelligent stacking equipment |
Jun-xia JIANG( ),Hai-peng LIAO ),Hai-peng LIAO |
| School of Mechanical Engineering, Zhejiang University, Hangzhou 310027, China |
|
|
|
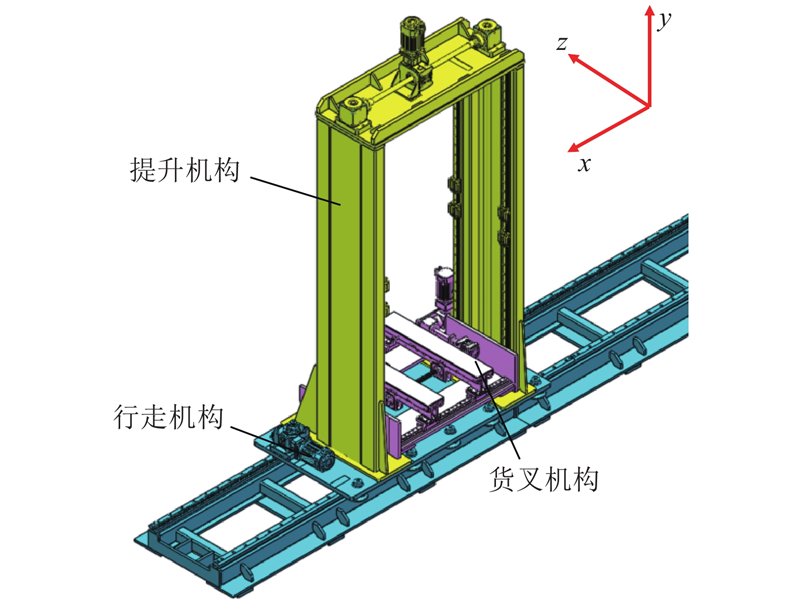
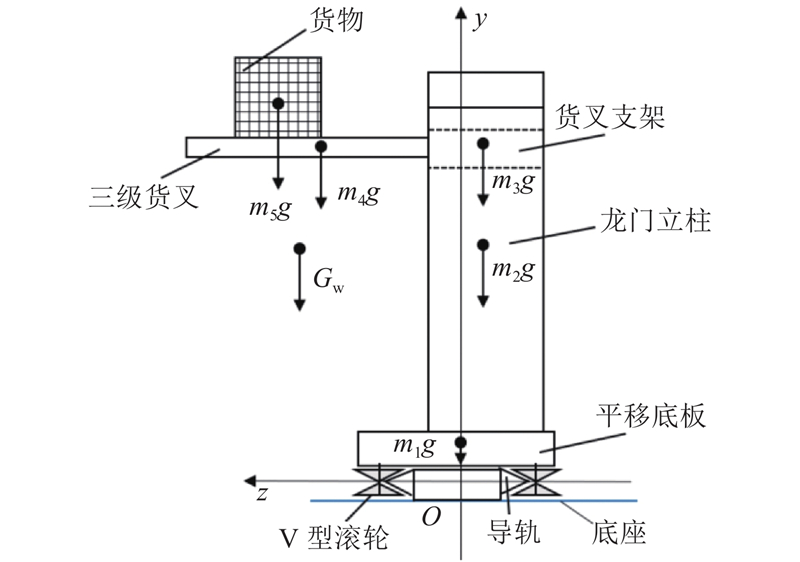
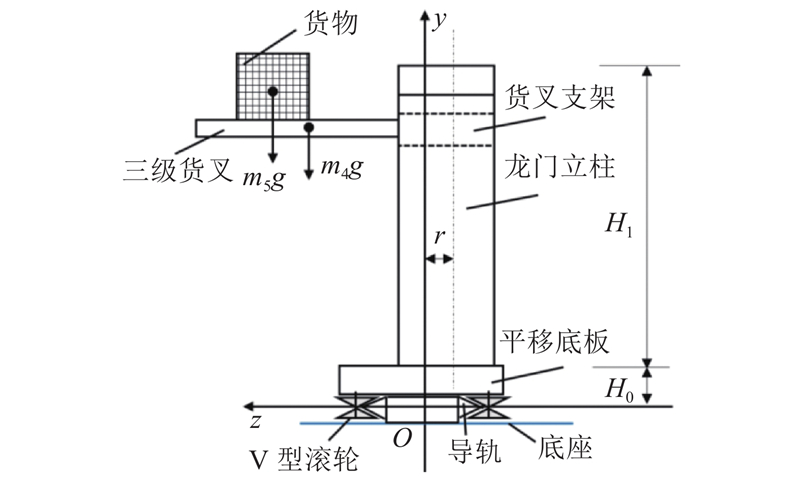
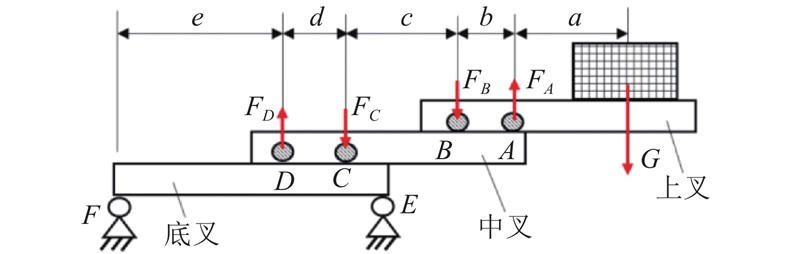
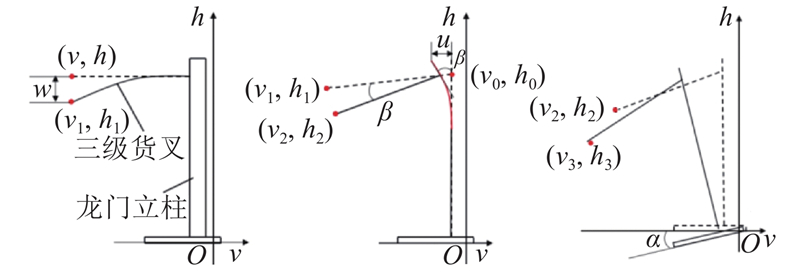
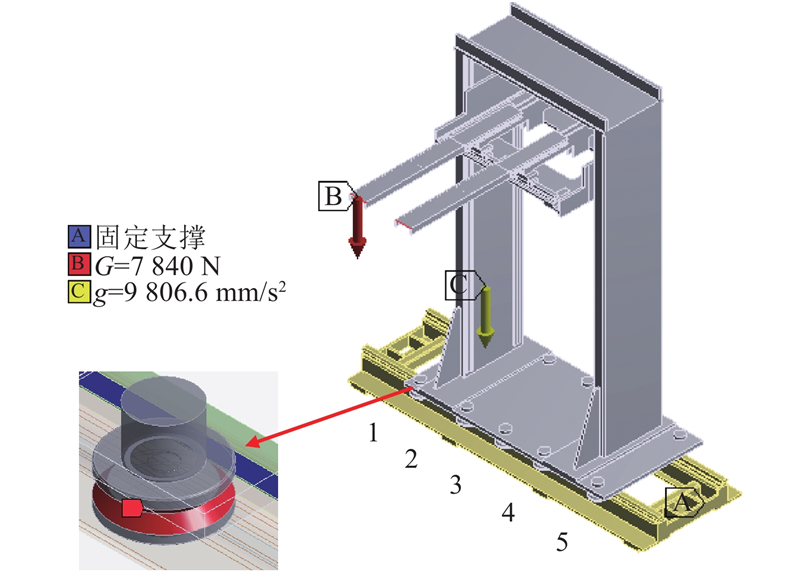
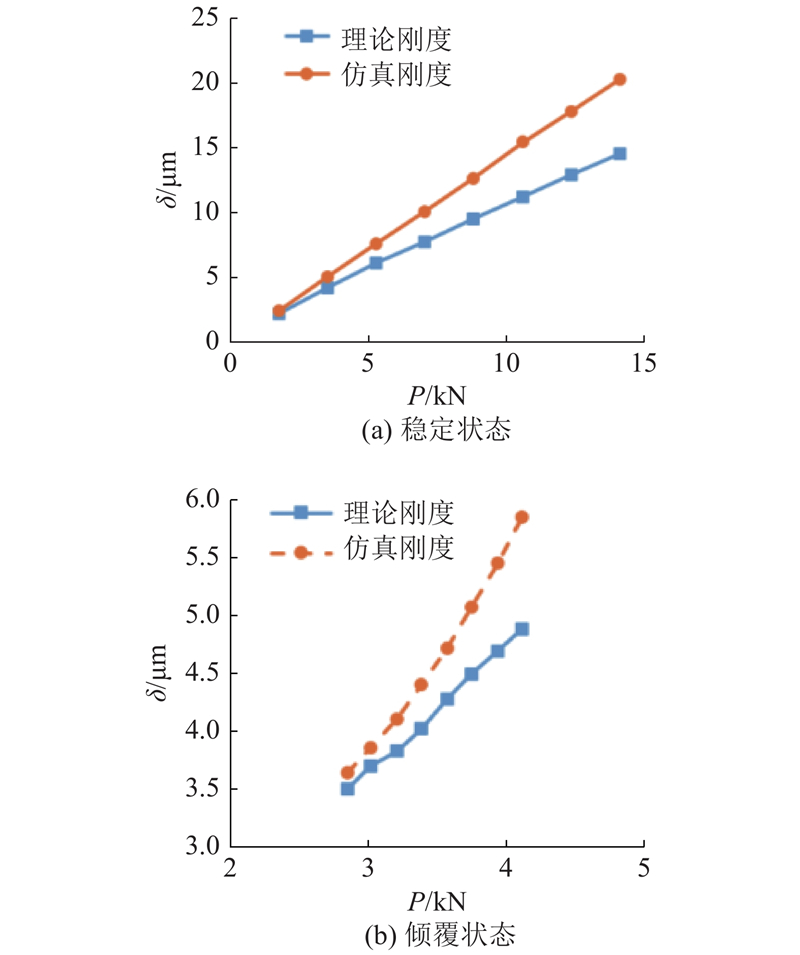
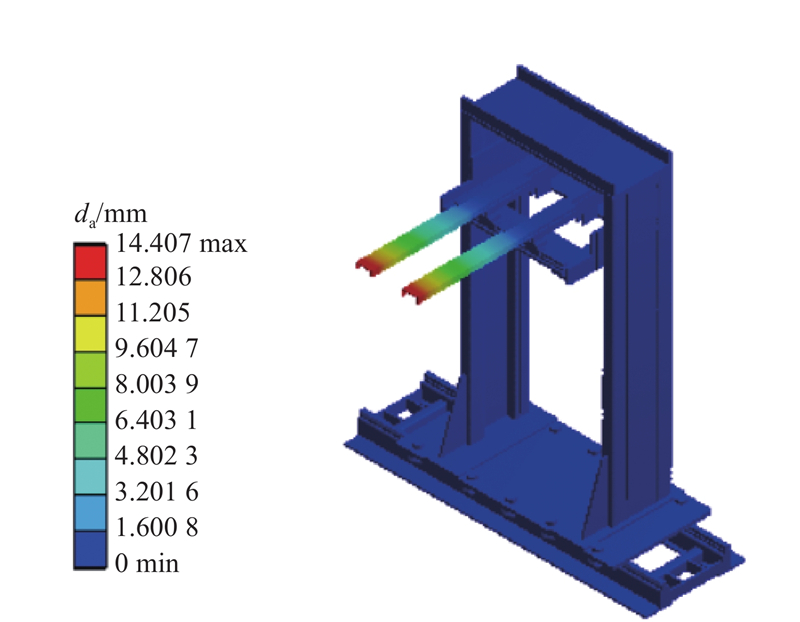
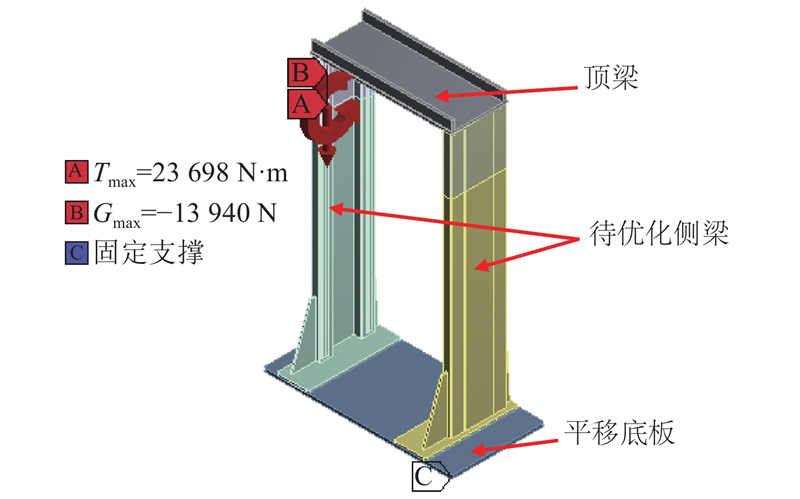
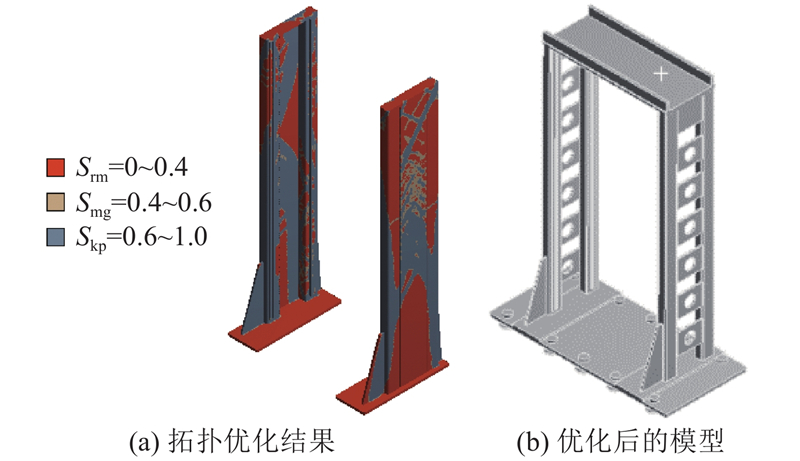
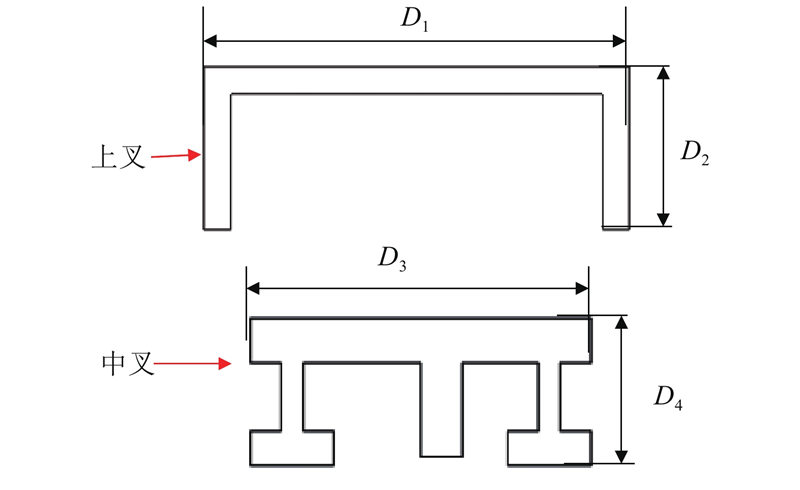
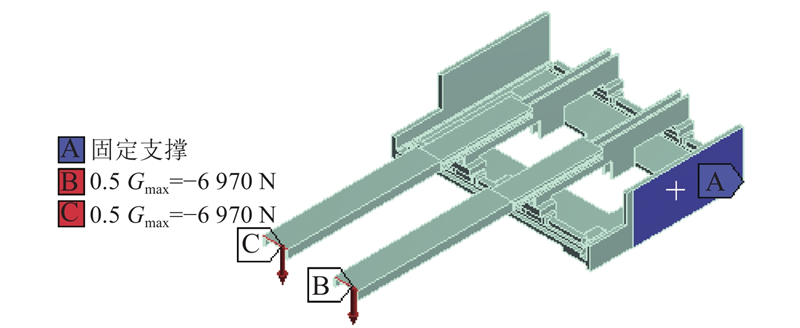
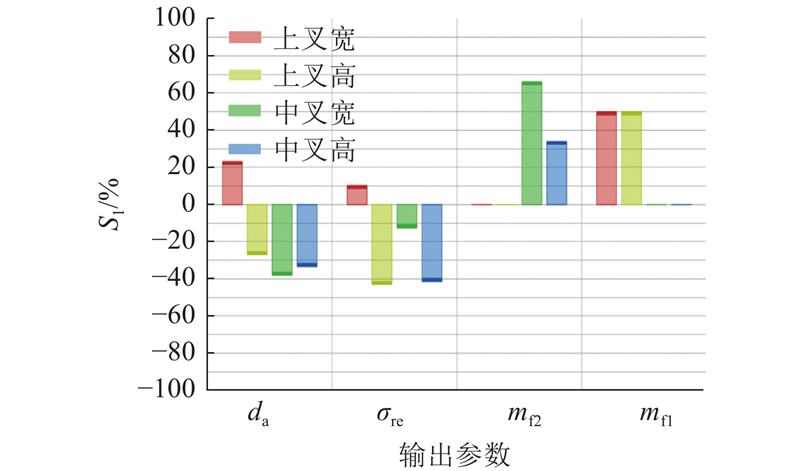
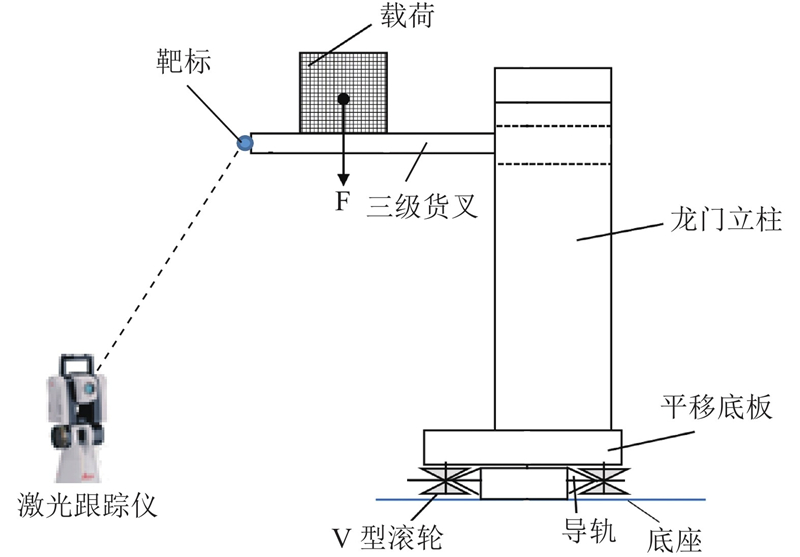
Abstract The structure scheme of heavy-duty intelligent stacking equipment was proposed aiming at the goods handling requirements of heavy duty, high precision, high reliability and long distance. The calculation method of the comprehensive stiffness of stacking equipment based on the calculation method of the contact force of V-type roller was proposed through the analysis of working principle and bearing force of stacking equipment. A calculation example of stacking equipment was given. The finite element method was used to solve contact stiffness of V-type guide rail and comprehensive deformation of stacking equipment compared with the theoretical calculation results. The accuracy of the theoretical method was verified. The structure of the gantry column and the three-level cargo fork was optimized by establishing optimization models for maximizing stiffness as optimization objective. The optimal structure of the column and the optimal section parameters of fork were obtained. The actual operation of stacking equipment was conducted, and its comprehensive deflections under static loads were tested. Results show that the optimized stacking equipment can meet the requirements of engineering applications.
|
|
Received: 05 December 2020
Published: 27 October 2021
|
|
|
重载智能堆垛装备刚度建模与结构优化
针对重载、高精度、高可靠性、长距离等货物搬运要求,提出重载智能堆垛装备的结构方案.通过对堆垛装备的工作原理及承载受力分析,提出基于V型滚轮接触力计算法的堆垛装备综合刚度求解方法,给出计算实例. 利用有限元方法求解V型导轨的接触刚度及堆垛装备的综合变形量,与理论计算结果进行对比,验证了理论方法的准确性. 通过建立基于刚度最大为优化目标的优化模型,对龙门立柱与三级货叉进行结构优化,得到立柱优化结构以及货叉最优的截面参数. 对堆垛装备进行实机运行及静态承载下的综合挠度检测. 结果表明,优化后的堆垛装备能够满足工程应用的要求.
关键词:
堆垛装备,
V型导轨,
刚度建模,
有限元分析(FEA),
结构优化
|
|
| [1] |
蔡安江, 应嘉奇, 王坚, 等 分散式立体仓库堆垛机调度模型[J]. 计算机集成制造系统, 2016, 22 (3): 793- 799
CAI An-jiang, YING Jia-qi, WANG Jian, et al Scheduling model of crane in distributed automated warehouse[J]. Computer Integrated Manufacturing Systems, 2016, 22 (3): 793- 799
|
|
|
| [2] |
柳赛男, 柯映林, 李江雄, 等 基于调度策略的自动化仓库系统优化问题研究[J]. 计算机集成制造系统, 2006, 12 (9): 1438- 1443
LIU Sai-nan, KE Ying-lin, LI Jiang-xiong, et al Optimization for automated warehouse based on scheduling policy[J]. Computer Integrated Manufacturing Systems, 2006, 12 (9): 1438- 1443
doi: 10.3969/j.issn.1006-5911.2006.09.015
|
|
|
| [3] |
章真雄. 40m高单立柱巷道堆垛机结构设计与分析[D]. 苏州: 苏州大学, 2014: 2-3.
ZHANG Zhen-xiong. Structural design and analysis of 40m high single column roadway stacker [D]. Suzhou: Suzhou University, 2014: 2-3.
|
|
|
| [4] |
李杲. 有轨巷道式堆垛机机械结构的研究[D]. 兰州: 兰州交通大学, 2016: 10-20.
LI Gao. Research on the mechanical structure of railroad laneway-stacker [D]. Lanzhou: Lanzhou Jiaotong University, 2016: 10-20.
|
|
|
| [5] |
宁波, 吕志军, 娄文斌 基于ANSYS Workbench的堆垛机结构分析与优化[J]. 机械设计与制造, 2012, 33 (6): 77- 79
NING Bo, LV Zhi-jun, LOU Wen-bin Analysis and optimization of stacker structure based on ANSYS Workbench[J]. Machinery Design and Manufacture, 2012, 33 (6): 77- 79
doi: 10.3969/j.issn.1001-3997.2012.06.029
|
|
|
| [6] |
马维金, 熊诗波, 熊晓燕 基于模态理论的振动结构声辐射信号特征提取方法及其应用[J]. 机械工程学报, 2005, 41 (5): 15- 20
MA Wei-jin, XIONG Shi-bo, XIONG Xiao-yan Method for sound signal characteristic extraction based on modal analysis and its application[J]. Journal of Mechanical Engineering, 2005, 41 (5): 15- 20
doi: 10.3321/j.issn:0577-6686.2005.05.003
|
|
|
| [7] |
TAKAHASHI M, KINOSHITA S, KATO H, et al Positioning control of a stacker crane using a robust simple adaptive control method[J]. IFAC Proceedings Volumes, 2004, 37 (12): 161- 166
doi: 10.1016/S1474-6670(17)31461-1
|
|
|
| [8] |
HAJDU S, GASPAR P Reducing the mast vibration of single-mast stacker cranes by gain-scheduled control[J]. International Journal of Applied Mathematics and Computer Science, 2016, 26 (4): 791- 802
doi: 10.1515/amcs-2016-0056
|
|
|
| [9] |
欧阳永强, 张新艳 考虑堆垛机加减速的节能自动立库设计[J]. 浙江大学学报: 工学版, 2019, 53 (9): 1681- 1688
OUYANG Yong-qiang, ZHANG Xin-yan Design of energy-saving automated storage and retrieval system considering acceleration and deceleration of storage and retrieval machine[J]. Journal of Zhejiang University: Engineering Science, 2019, 53 (9): 1681- 1688
|
|
|
| [10] |
ROUWENHORST B, REUTER B, STOCKRAHM V, et al Warehouse design and control: framework and literature review[J]. Europe Journal of Operation Research, 2000, 122 (3): 515- 533
|
|
|
| [11] |
LIU D B, MOU S D, LU M X, et al Travel time model of a new compact storage system[J]. International Journal of Control and Automation, 2014, 7 (7): 447- 460
doi: 10.14257/ijca.2014.7.7.37
|
|
|
| [12] |
侯瑞, 吕志军, 杨光辉, 等 立体仓库堆垛机取货装置研究[J]. 物流技术, 2016, 35 (11): 50- 54
HOU Rui, LV Zhi-jun, YANG Guang-hui, et al Study on retrieving mechanism of stackers in AS/RS[J]. Logistics Technology, 2016, 35 (11): 50- 54
doi: 10.3969/j.issn.1005-152X.2016.11.012
|
|
|
| [13] |
田红亮, 郑金华, 陈甜敏, 等 直线运动滚动导轨副的法向接触力学模型[J]. 西安交通大学学报, 2016, 50 (5): 1- 11
TIAN Hong-liang, ZHENG Jin-hua, CHEN Tian-min, et al Normal contact mechanics model of linear motion rolling guideway pair[J]. Journal of Xi’an Jiaotong University, 2016, 50 (5): 1- 11
doi: 10.7652/xjtuxb201605001
|
|
|
| [14] |
冯健文, 赵美玲, 陈伟就, 等 滚柱直线导轨副的刚度计算及验证[J]. 机电工程技术, 2013, 42 (8): 159- 162
FENG Jian-wen, ZHAO Mei-ling, CHEN Wei-jiu, et al The calculation and verification for the rigidity of the roller linear guide[J]. Mechanical and Electrical Engineering Technology, 2013, 42 (8): 159- 162
doi: 10.3969/j.issn.1009-9492.2013.08.042
|
|
|
| [15] |
贾维新, 郝志勇, 徐红梅 基于结构优化方法的单缸机机体轻量化设计[J]. 浙江大学学报: 工学版, 2008, 42 (2): 224- 228
JIA Wei-xin, HAO Zhi-yong, XU Hong-mei Light-weight design of single cylinder engine block based on structure optimization[J]. Journal of Zhejiang University: Engineering Science, 2008, 42 (2): 224- 228
|
|
|
| [16] |
丁渊明, 王宣银 串联机械臂结构优化方法[J]. 浙江大学学报: 工学版, 2010, 44 (12): 2360- 2364
DING Yuan-ming, WANG Xuan-yin Optimization method of serial manipulator structure[J]. Journal of Zhejiang University: Engineering Science, 2010, 44 (12): 2360- 2364
|
|
|
| [17] |
董琛. 卧式双机联合钻铆系统综合刚度场建模和实验[D]. 杭州: 浙江大学, 2019: 63-65.
DONG Chen. Modeling and experiment of the general end stiffness of automatic horizontal dual-machine cooperative drilling and riveting system [D]. Hangzhou: Zhejiang University, 2019: 63-65.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|