|
|
|
| Adaptive gain-based super-twisting sliding mode disturbance rejection fault-tolerant control for tri-rotor UAV |
Jialei LI1( ),Wei HAO1,2,*(),Shifa WANG1,Tong MEI1,Wenlai MA1,2 ),Wei HAO1,2,*(),Shifa WANG1,Tong MEI1,Wenlai MA1,2 |
1. College of Flight, Shandong University of Aeronautics, Binzhou 256600, China
2. Shandong Provincial Engineering Research Center for General Aviation Operations and Manufacturing, Binzhou 256600, China |
|
|
|
Abstract An adaptive gain-based super-twisting sliding mode (STSM) disturbance rejection fault-tolerant control strategy was proposed for tri-rotor UAV attitude regulation under actuator stuck faults and unknown disturbances. An attitude system fault model was established by incorporating external disturbances and actuator fault characteristics. Considering modeling uncertainties, the adaptive algorithm and the STSM algorithm were integrated to design the disturbance rejection fault-tolerant controller. Online estimation of the control allocation matrix was realized through the adaptive mechanism, while the STSM algorithm achieved adaptive adjustment of controller gains to enhance disturbance rejection capability. This design mitigated adverse effects from disturbances, uncertainties, and actuator faults on system stability, and improved the system convergence speed. Finite-time convergence of the closed-loop system was rigorously proven using Lyapunov theory. Finally, through the UAV flight control hardware-in-the-loop experimental platform, it was verified that the designed fault-tolerant control strategy exhibited superior fault tolerance performance compared to the conventional super-twisting algorithm (STA).
|
|
Received: 14 April 2025
Published: 23 May 2026
|
|
|
| Fund: 国家自然科学基金资助项目(62103060);山东省自然科学基金资助项目(ZR2019PF021,ZR2020MF142);山东省高等学校“青创团队计划”团队项目(2023KJ274). |
|
Corresponding Authors:
Wei HAO
E-mail: feng-ljl@sdua.edu.cn;whao@sdua.edu.cn
|
基于自适应增益的三旋翼无人机超螺旋滑模抗扰容错控制
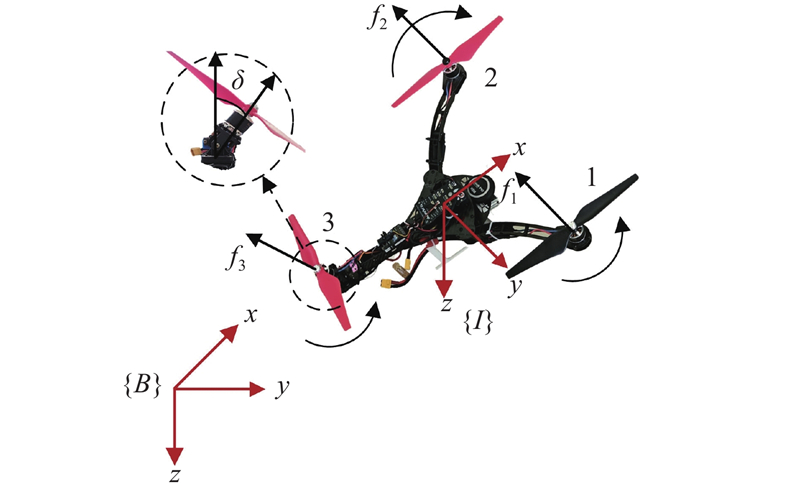
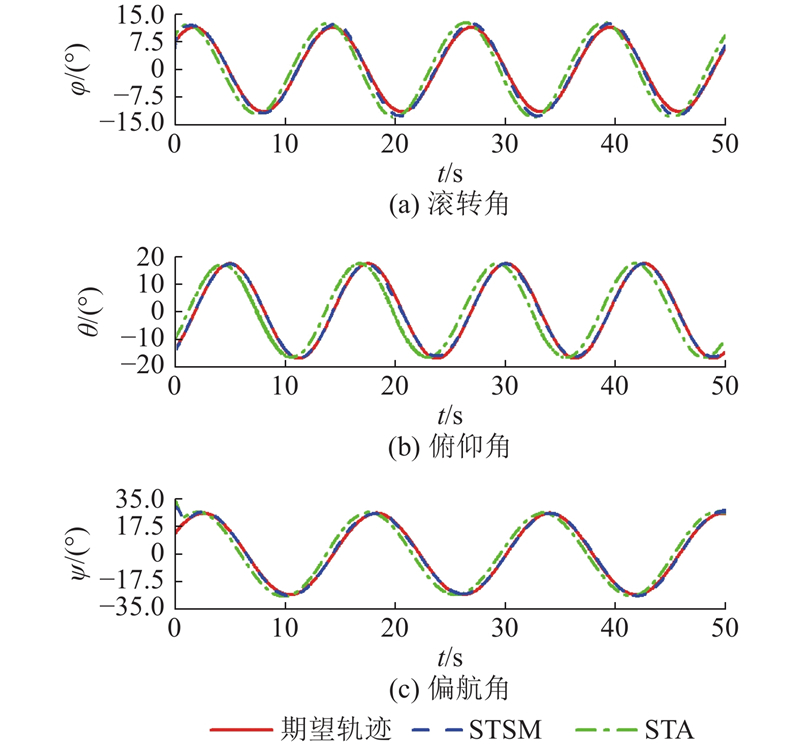
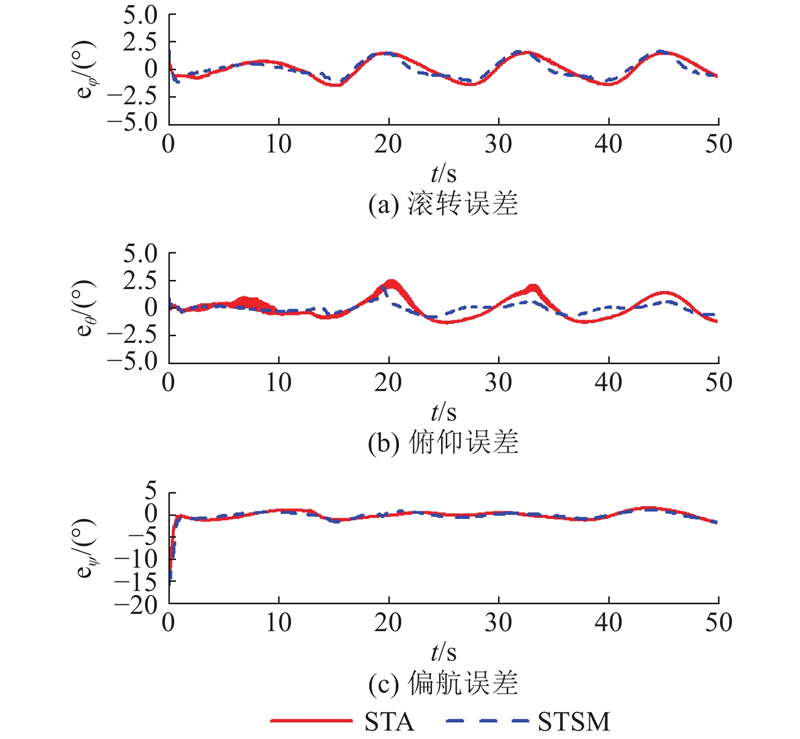
针对三旋翼无人机发生舵机卡死故障时的姿态控制问题,同时考虑未知外部扰动,提出基于自适应增益的超螺旋滑模(STSM)抗扰容错控制策略. 同时考虑外部扰动和舵机卡死故障,建立三旋翼无人机姿态系统故障模型. 考虑建模不确定性,融合自适应算法和超螺旋滑模算法设计抗扰容错控制器,自适应算法实现控制分配矩阵在线估计,超螺旋滑模算法通过设计控制器增益自适应率,抑制外部扰动、建模不确定性和舵机故障对系统稳定性的影响,提高系统收敛速度. 基于Lyapunov理论证明闭环系统有限时间收敛. 通过无人机飞控半实物实验平台验证了所设计容错控制策略相比于超螺旋算法(STA)具有更好的容错性能.
关键词:
三旋翼无人机,
超螺旋滑模,
自适应控制,
舵机卡死故障,
容错控制
|
|
| [1] |
段海滨, 王壮壮, 霍梦真, 等 带爪无人机自主控制技术新进展[J]. 中国科学: 技术科学, 2024, 54 (8): 1533- 1548
DUAN Haibin, WANG Zhuangzhuang, HUO Mengzhen, et al New progresses in autonomous control technology for UAV with manipulator[J]. Scientia Sinica: Technologica, 2024, 54 (8): 1533- 1548
|
|
|
| [2] |
GU X, XIAN B, LI J Model free adaptive control design for a tilt trirotor unmanned aerial vehicle with quaternion feedback: theory and implementation[J]. International Journal of Adaptive Control and Signal Processing, 2022, 36 (1): 122- 137
doi: 10.1002/acs.3344
|
|
|
| [3] |
XIE T, XIAN B, GU X Fixed-time convergence attitude control for a tilt trirotor unmanned aerial vehicle based on reinforcement learning[J]. ISA Transactions, 2023, 132: 477- 489
doi: 10.1016/j.isatra.2022.06.006
|
|
|
| [4] |
XIE T, XIAN B, GU X, et al Disturbance observer-based fixed-time tracking control for a tilt trirotor unmanned aerial vehicle[J]. IEEE Transactions on Industrial Electronics, 2024, 71 (4): 3894- 3903
doi: 10.1109/TIE.2023.3277090
|
|
|
| [5] |
RAZA A, MALIK F M, KHAN R, et al Sliding mode control-based autonomous control of a tri-rotor unmanned aerial vehicle[J]. Guidance, Navigation and Control, 2021, 1 (3): 2150013
doi: 10.1142/S2737480721500138
|
|
|
| [6] |
王征宇, 鲜斌 倾转式三旋翼无人机的有限时间收敛控制设计[J]. 控制理论与应用, 2019, 36 (9): 1442- 1452
WANG Zhengyu, XIAN Bin Finite time convergence control design of the tilt tri-rotor unmanned aerial vehicle[J]. Control Theory and Applications, 2019, 36 (9): 1442- 1452
doi: 10.7641/CTA.2018.80034
|
|
|
| [7] |
王栋, 鲜斌 倾转式三旋翼无人机的自适应鲁棒容错控制[J]. 控制理论与应用, 2020, 37 (4): 784- 792
WANG Dong, XIAN Bin Adaptive robust fault tolerant control of the tilt tri-rotor unmanned aerial vehicle[J]. Control Theory and Applications, 2020, 37 (4): 784- 792
doi: 10.7641/CTA.2019.90172
|
|
|
| [8] |
MA W, HU M, HAO W, et al Nonlinear robust fault-tolerant tracking control of a tri-rotor UAV against actuator’s abnormal behavior[J]. Actuators, 2023, 12 (4): 140
doi: 10.3390/act12040140
|
|
|
| [9] |
马文来, 王少波, 李瑞先, 等 基于两级卡尔曼滤波器的三旋翼无人机执行器异常行为诊断[J]. 电光与控制, 2024, 31 (2): 105- 111
MA Wenlai, WANG Shaobo, LI Ruixian, et al Abnormal behavior diagnosis of tri-rotor UAV’s actuator based on two-stage Kalman filter[J]. Electronics Optics and Control, 2024, 31 (2): 105- 111
doi: 10.3969/j.issn.1671-637X.2024.02.016
|
|
|
| [10] |
赵振华, 肖亮, 姜斌, 等 基于扩张状态观测器的四旋翼无人机快速非奇异终端滑模轨迹跟踪控制[J]. 控制与决策, 2022, 37 (9): 2201- 2210
ZHAO Zhenhua, XIAO Liang, JIANG Bin, et al Fast nonsingular terminal sliding mode trajectory tracking control of a quadrotor UAV based on extended state observers[J]. Control and Decision, 2022, 37 (9): 2201- 2210
doi: 10.13195/j.kzyjc.2021.1819
|
|
|
| [11] |
KHALID A, MUSHTAQ Z, ARIF S, et al Control schemes for quadrotor UAV: taxonomy and survey[J]. ACM Computing Surveys, 2024, 56 (5): 1- 32
|
|
|
| [12] |
SHTESSEL Y, TALEB M, PLESTAN F A novel adaptive-gain supertwisting sliding mode controller: methodology and application[J]. Automatica, 2012, 48 (5): 759- 769
doi: 10.1016/j.automatica.2012.02.024
|
|
|
| [13] |
CASTILLO I, FRIDMAN L, MORENO J A Super-Twisting Algorithm in presence of time and state dependent perturbations[J]. International Journal of Control, 2018, 91 (11): 2535- 2548
doi: 10.1080/00207179.2016.1269952
|
|
|
| [14] |
MORENO J A, RÍOS H, OVALLE L, et al Multivariable super-twisting algorithm for systems with uncertain input matrix and perturbations[J]. IEEE Transactions on Automatic Control, 2022, 67 (12): 6716- 6722
doi: 10.1109/TAC.2021.3130880
|
|
|
| [15] |
XU J, NIU Y, SHI P Adaptive multi-input super twisting control for a quadrotor: singular perturbation approach[J]. IEEE Transactions on Industrial Electronics, 2024, 71 (5): 5195- 5204
doi: 10.1109/TIE.2023.3281686
|
|
|
| [16] |
HU J, ZHANG X, ZHANG D, et al Finite-time adaptive super-twisting sliding mode control for autonomous robotic manipulators with actuator faults[J]. ISA Transactions, 2024, 144: 342- 351
doi: 10.1016/j.isatra.2023.10.028
|
|
|
| [17] |
TIAN B, ZHANG X, LI Z, et al Adaptive multivariable super-twisting-based Lyapunov redesign for RLV attitude control[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024, 54 (5): 3144- 3152
doi: 10.1109/TSMC.2024.3355398
|
|
|
| [18] |
LI B, LIU H, AHN C K, et al Optimized intelligent tracking control for a quadrotor unmanned aerial vehicle with actuator failures[J]. Aerospace Science and Technology, 2024, 144: 108803
doi: 10.1016/j.ast.2023.108803
|
|
|
| [19] |
BOUKATTAYA M, MEZGHANI N, DAMAK T Adaptive nonsingular fast terminal sliding-mode control for the tracking problem of uncertain dynamical systems[J]. ISA Transactions, 2018, 77: 1- 19
doi: 10.1016/j.isatra.2018.04.007
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|