| Mechanical Engineering,Electrical Engineering |
|


|
|
|
| Adaptive control performance of heavy load magnetic bearing and rotor |
Xu-dong GUAN( ),Jin ZHOU*(),Chao-wu JIN,Yuan-ping XU ),Jin ZHOU*(),Chao-wu JIN,Yuan-ping XU |
| College of Mechanical and Electrical Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China |
|
|
|
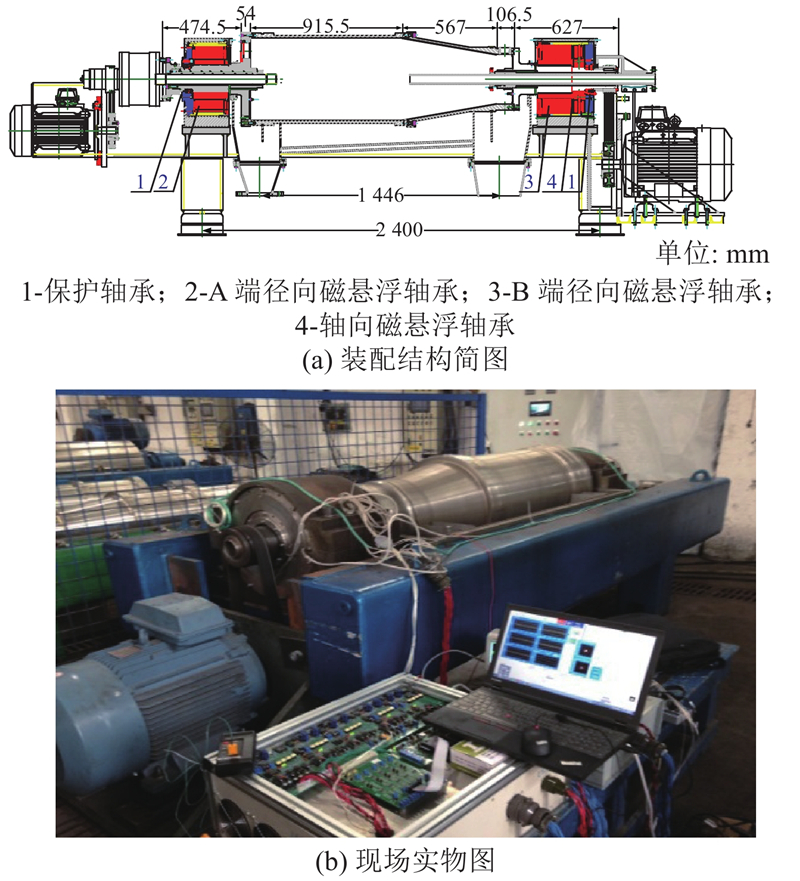
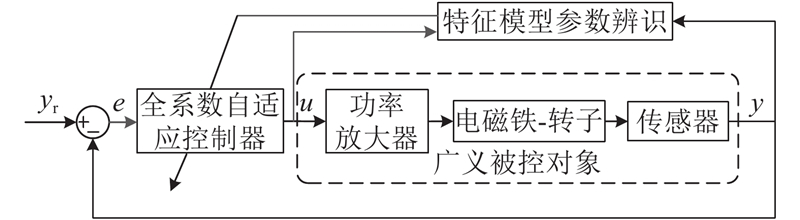
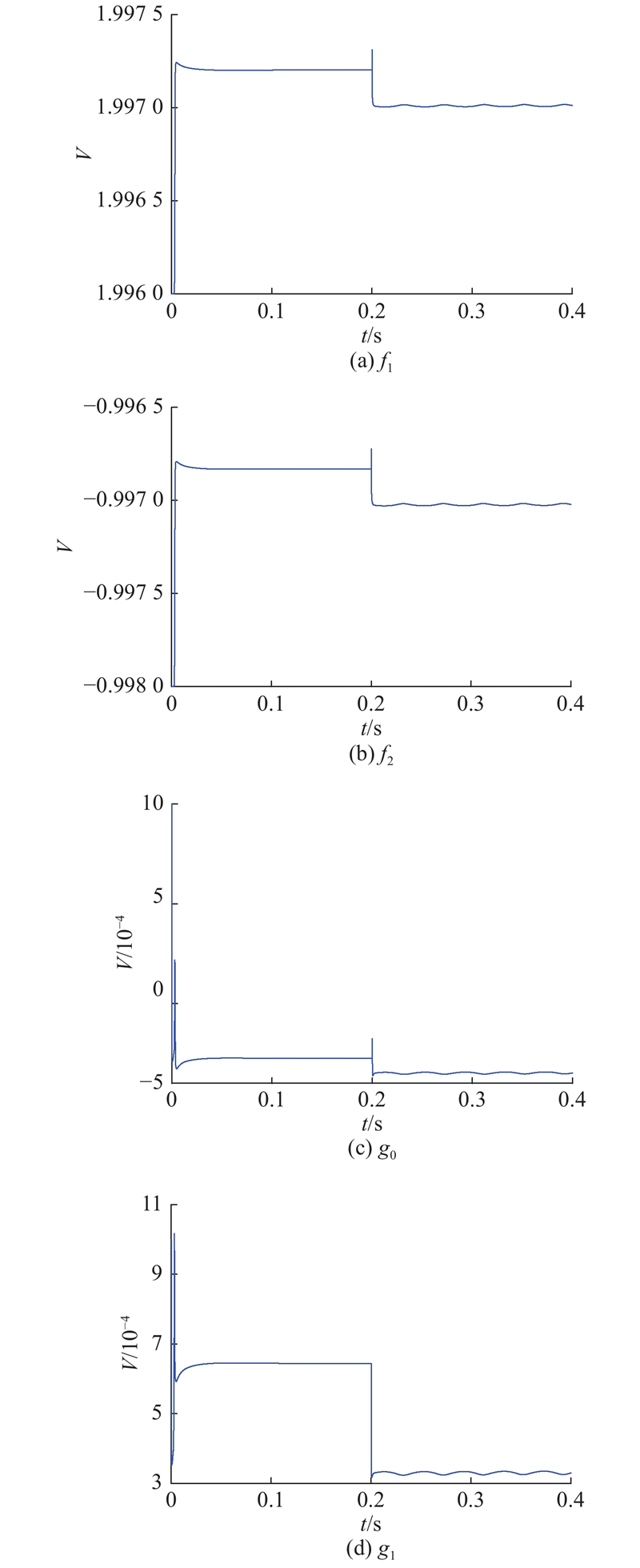
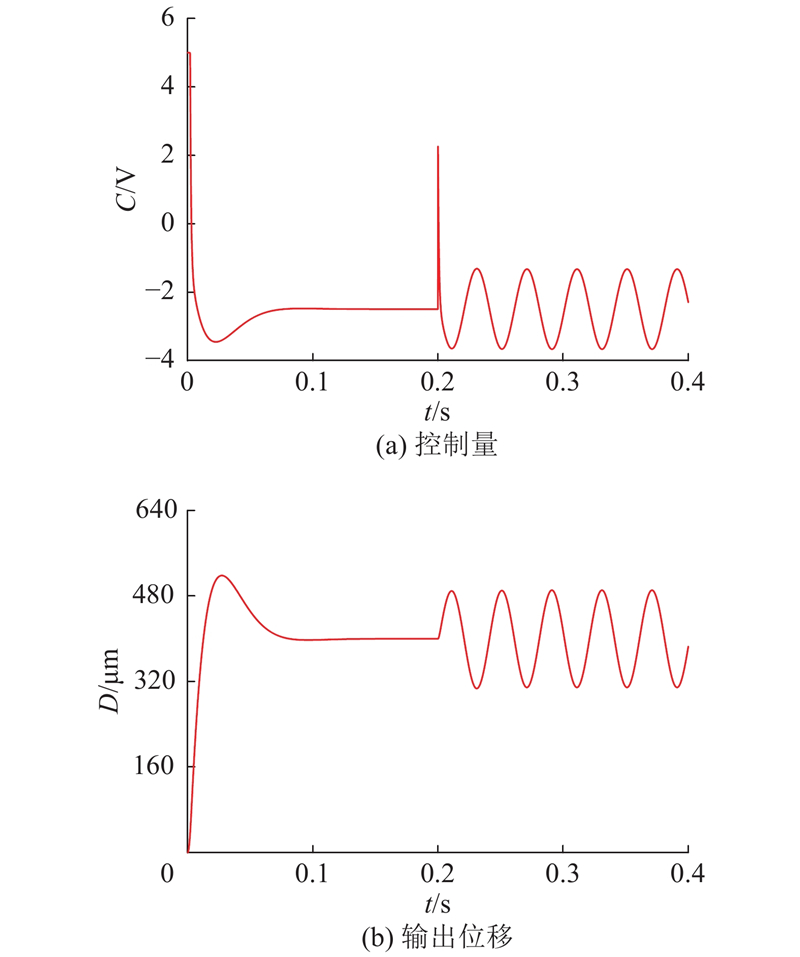
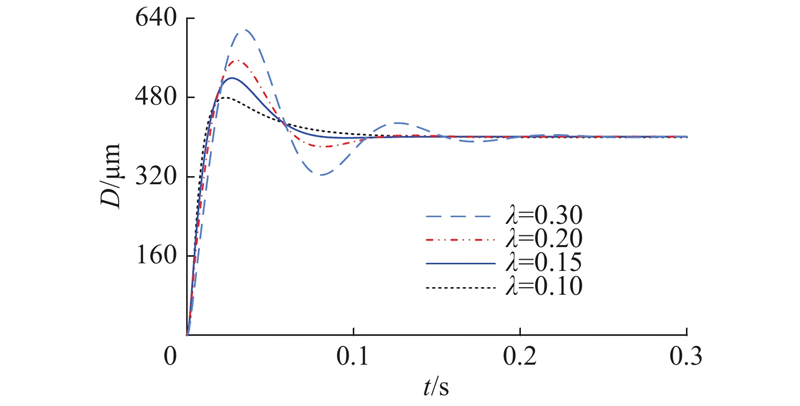
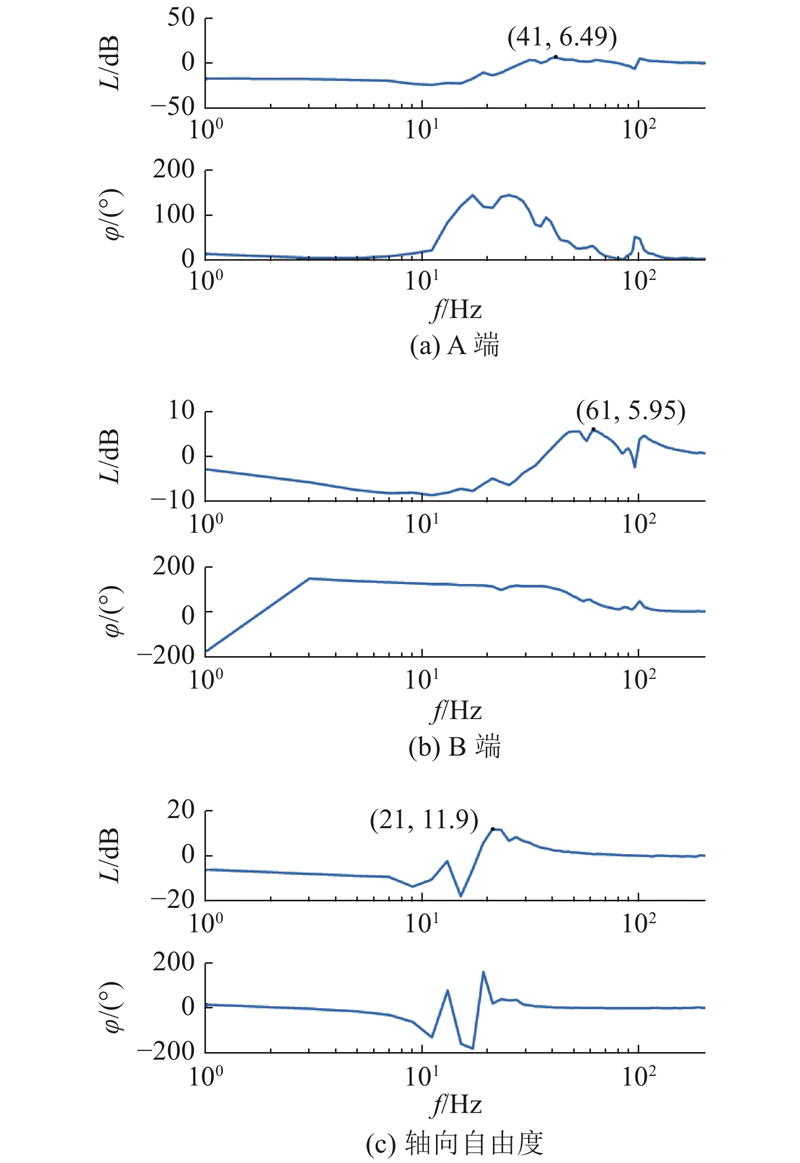
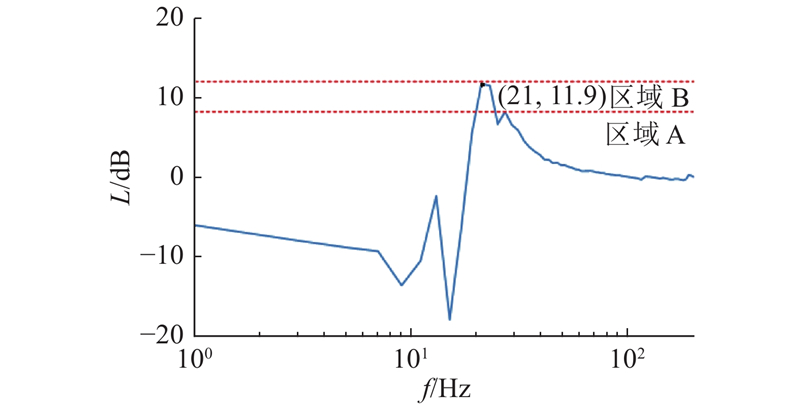
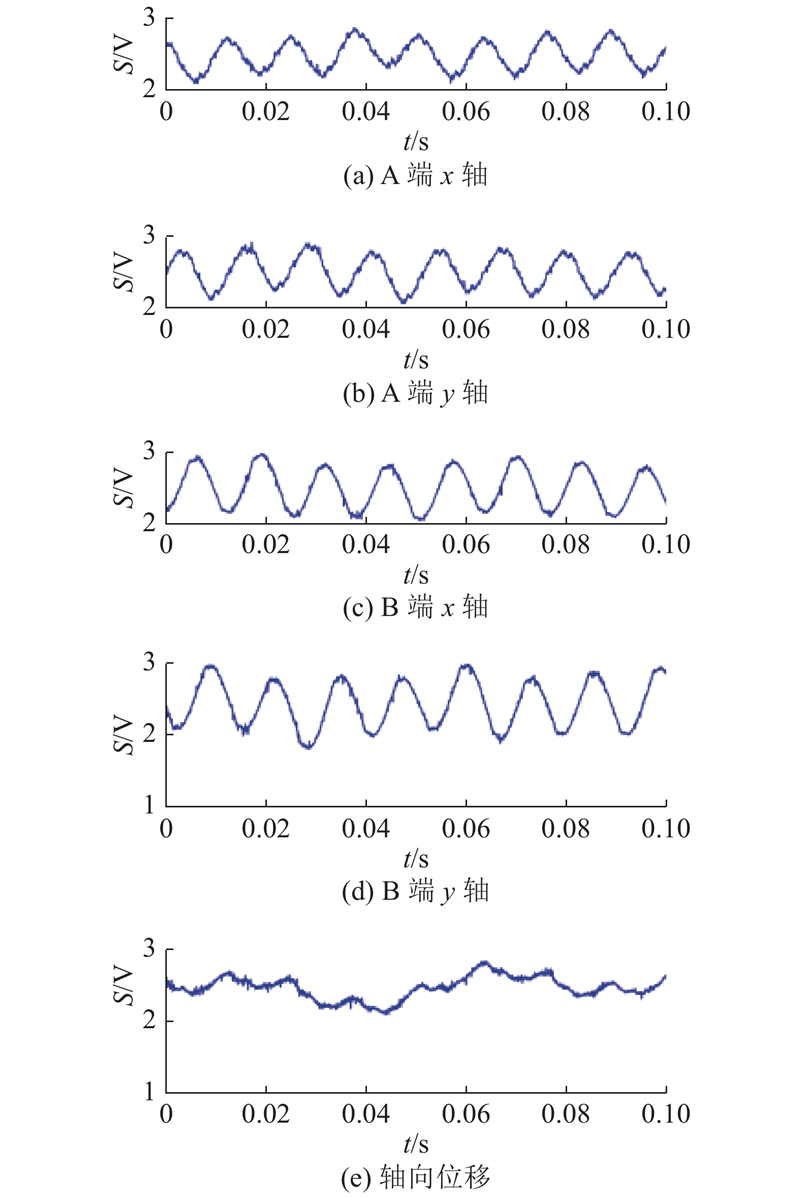
Abstract The adaptive control method was adopted to analyze the control performance of the heavy load rotor in the magnetic levitation horizontal spiral centrifuge in order to deal with the problems caused by the large size and heavy load of the magnetic bearing and rotor in the control system design, such as the difficulty in accurately establishing the mathematical model of the control object and the difficulty in adjusting the control parameters. A magnetic bearing-rotor system was designed to support the horizontal spiral centrifuge with the rotor length of about 3.4 m and a mass of about 1 090 kg. The simulation analysis and experimental research were conducted by using the adaptive control method to verify the real-time adjustable control performance of the adaptive control method. The heavy load rotor supported by magnetic bearing rotated stably to about 4 740 r/min, and the rotational speed was increased by more than 50% compared with the traditional rolling support, which can effectively improve the separation efficiency of centrifuge. The stability margin and vibration level of the magnetic bearings and rotor system were proved to be within B level by ISO14839.
|
|
Received: 02 March 2019
Published: 05 April 2020
|
|
|
|
Corresponding Authors:
Jin ZHOU
E-mail: guanxd@nuaa.edu.cn;zhj@nuaa.edu.cn
|
重载磁悬浮轴承-转子自适应控制性能
针对磁悬浮轴承-转子大型化、重载化为控制系统设计带来的控制对象数学模型不易精确建立、控制参数较难调节等问题,以磁悬浮卧螺离心机中重载转子为研究对象,采用自适应控制方法进行控制性能研究. 设计支撑卧螺离心机的磁悬浮轴承-转子系统,转子长度约为3.4 m,质量约为1 090 kg. 通过仿真和试验验证了自适应方法可实时调节的控制性能,使得磁悬浮轴承支撑的重载转子稳定旋转至约4 740 r/min,转速较传统滚动支撑提高了50%以上,可以有效提高离心机的分离效率,通过ISO14839验证了稳定裕度及振动水平位均在B级安全以内.
关键词:
磁悬浮轴承,
重载转子,
自适应控制,
控制性能,
ISO14839
|
|
| [1] |
杨彬. 卧螺过滤离心机动力特性分析与结构优化设计[D]. 镇江: 江苏科技大学, 2013.
YANG Bin. Dynamic characteristics analysis and structural optimization design of horizontal worm screen centrifuge [D]. Zhenjiang: Jiangsu University of Science and Technology, 2013.
|
|
|
| [2] |
周瑾, 高天宇, 陈怡, 等 采用动力测试的双转子卧螺离心机模型修正[J]. 浙江大学学报: 工学版, 2019, 53 (2): 40- 48
ZHOU Jin, GAO Tian-yu, CHEN Yi, et al Model updating of dual-rotor decanter centrifuge with dynamic test[J]. Journal of Zhejiang University: Engineering Science, 2019, 53 (2): 40- 48
|
|
|
| [3] |
SCHWEITZER G, MASLEN E H. Magnetic bearings: theory, design, and application to rotating machinery [M]. Berlin: Springer, 2009.
|
|
|
| [4] |
AESCHLIMANN B, HUBATKA M. STETTLER R. Commissioning of off-shore gas compressor with 9-axes magnetic bearing system: commissioning tools [C] // Proceedings of the ASME Turbo Expo: Turbomachinery Technical Conference and Exposition.[S. l.]: ASME, 2017.
|
|
|
| [5] |
马云翔, 于晓丽, 于溯源, 等 用于支撑HTR-10GT氦气轮机的磁力轴承设计研究[J]. 热能动力工程, 2011, 26 (2): 233- 237
MA Yun-xiang, YU Xiao-li, YU Su-yuan, et al Study on design of the magnetic bearings for supporting a HTR-10GT helium turbine[J]. Journal of Engineering for Thermal Energy and Power, 2011, 26 (2): 233- 237
|
|
|
| [6] |
赵泾雄, 杨国军, 李悦, 等 HTR-10氦风机磁悬浮转子跌落在辐助轴承上的数值分析[J]. 核动力工程, 2012, 33 (3): 61- 64
ZHAO Jing-xiong, WANG Guo-jun, LI Yue, et al Numerical analysis of magnetically suspended rotor in HTR-10 helium circulator being dropped into auxiliary bearings[J]. Nuclear Power Engineering, 2012, 33 (3): 61- 64
doi: 10.3969/j.issn.0258-0926.2012.03.013
|
|
|
| [7] |
YANG Guo-jun, XU Yang, SHI Zhen-gang, et al Characteristic analysis of rotor dynamics and experiments of active magnetic bearing for HTR-10GT[J]. Nuclear Engineering and Design, 2007, 237 (12): 1363- 1371
|
|
|
| [8] |
NOSHADI A, SHI J, LEE W S, et al. High performance H∞ control of non-minimum phase active magnetic bearing system [C] // IECON 2014-40th Annual Conference of the IEEE Industrial Electronics Society. Dallas, TX: IEEE, 2014: 183-189.
|
|
|
| [9] |
PESCH A H, SMIRNOV A, PYRH?NEN O, et al Magnetic bearing spindle tool tracking through μ-synthesis robust control[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20 (3): 1448- 1457
doi: 10.1109/TMECH.2014.2344592
|
|
|
| [10] |
JIN C, GUO K, XU Y, et al Design of magnetic bearing control system based on active disturbance rejection theory[J]. Journal of Vibration and Acoustics, 2018, 141 (1): 011009
|
|
|
| [11] |
NOSHADI A, SHI J, LEE W S, et al Optimal PID-type fuzzy logic controller for a multi-input multi-output active magnetic bearing system[J]. Neural Computing and Applications, 2016, 27 (7): 2031- 2046
doi: 10.1007/s00521-015-1996-7
|
|
|
| [12] |
WU H, SHA Z An all-coefficient adaptive control method[J]. Acta Automatica Sinica, 1985, 11 (1): 12- 20
|
|
|
| [13] |
WU H, HU J, XIE Y Characteristic model-based all-coefficient adaptive control method and its applications[J]. IEEE Transactions on Systems, Man, and Cybernetics-Part C: Applications and Reviews, 2007, 37 (2): 213- 221
doi: 10.1109/TSMCC.2006.887004
|
|
|
| [14] |
ZHANG G, LIU J, WU H. Adaptive control of large flexible structures using the characteristic modeling technique [C] // Proceedings of the IMACS Multiconference on Computational Engineering in Systems Applications. Beijing: Tsinghua University Press, 2006.
|
|
|
| [15] |
DI L, LIN Z Control of a flexible rotor active magnetic bearing test rig: a characteristic model based all-coefficient adaptive control approach[J]. Control Theory and Technology, 2014, 12 (1): 1- 12
doi: 10.1007/s11768-014-0184-0
|
|
|
| [16] |
LYU X, DI L, LIN Z On robustness of an AMB suspended energy storage flywheel platform under characteristic model based all-coefficient adaptive control laws[J]. Frontiers of Information Technology and Electronic Engineering, 2019, 20 (1): 120- 130
doi: 10.1631/FITEE.1800606
|
|
|
| [17] |
陈怡. 磁悬浮轴承支承的卧螺离心机动力学分析及优化设计[D]. 南京: 南京航空航天大学, 2016: 52.
CHEN Yi. Dynamics analysis and optimization design of the maglev decanter centrifuge [D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2016: 52.
|
|
|
| [18] |
SKOGESTAD S, POSTLETHWAITE I. Multivariable feedback control: analysis and design [M]. New York: Wiley, 2005.
|
|
|
| [19] |
吴宏鑫, 胡军, 解永春, 等. 基于特征模型的智能自适应控制[M]. 北京: 中国科学技术出版社, 2009.
|
|
|
| [20] |
崔恒斌, 周瑾, 董继勇, 等 磁悬浮旋转机械振动稳定性实例研究[J]. 浙江大学学报: 工学版, 2018, 52 (4): 635- 640
CUI Heng-bin, ZHOU Jin, DONG Ji-yong, et al Case study on vibration stability of rotating machinery equipped with active magnetic bearings[J]. Journal of Zhejiang University: Engineering Science, 2018, 52 (4): 635- 640
|
|
|
| [21] |
Mechanical vibration-vibration of rotating machinery equipped with active magnetic bearings-Part 3: evaluation of stability margin: ISO14839-3 [S]. London: British Standard Institution, 2006.
|
|
|
| [22] |
王正. 转动机械的转子动力学设计[M]. 北京: 清华大学出版社, 2015.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|