|
|
|
| Improved algorithm for identifying occluded vehicles and pedestrians in foggy images |
Tianhe YU( ),Wenlong WANG(),Yong LIU,Zhuangzhuang YANG,Shanchong HOU ),Wenlong WANG(),Yong LIU,Zhuangzhuang YANG,Shanchong HOU |
| School of Measurement and Control Technology and Communication Engineering, Harbin University of Science and Technology, Harbin 150006, China |
|
|
|
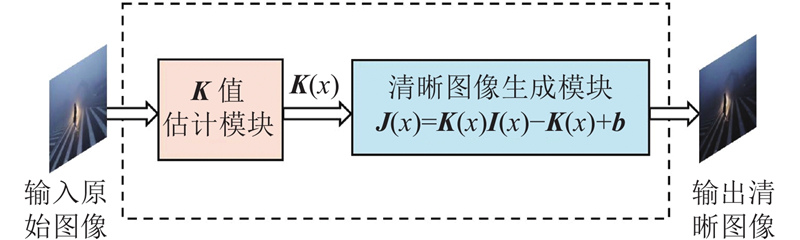
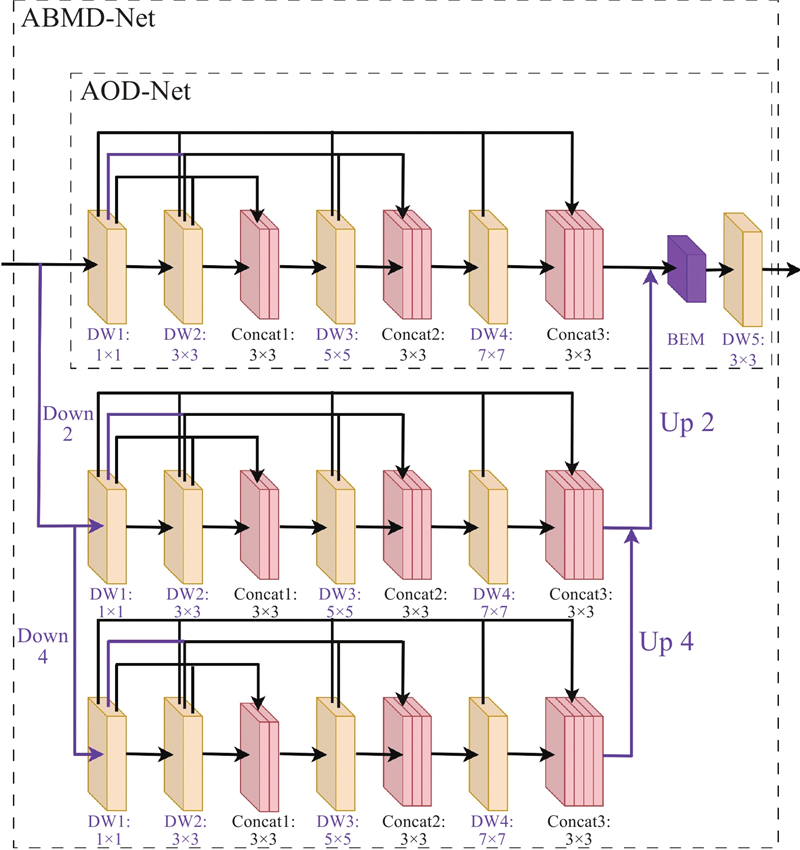
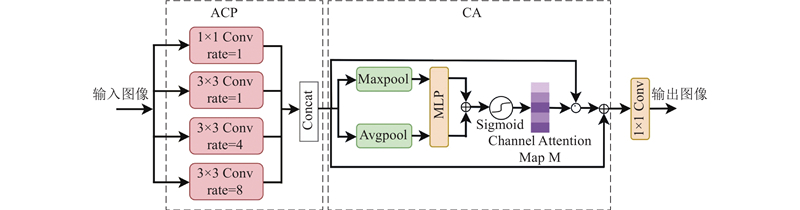
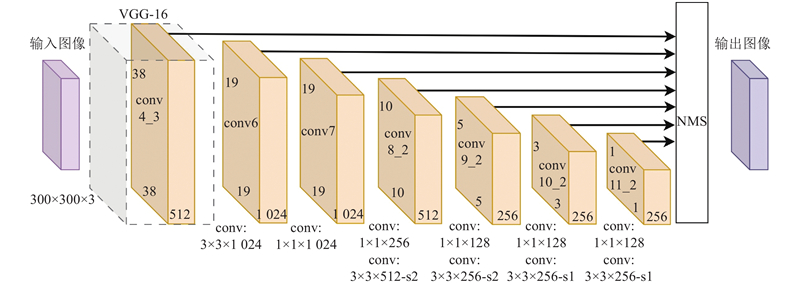
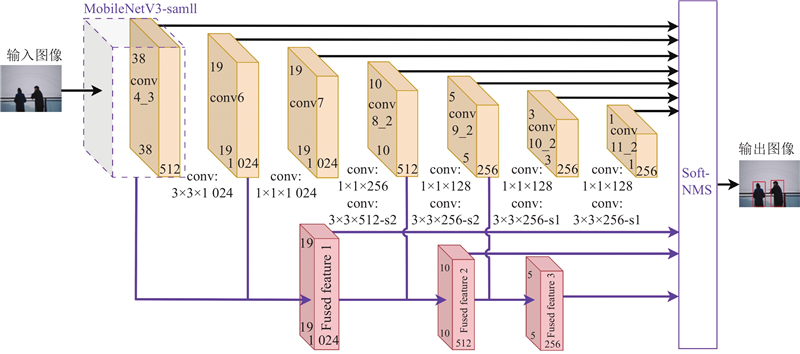
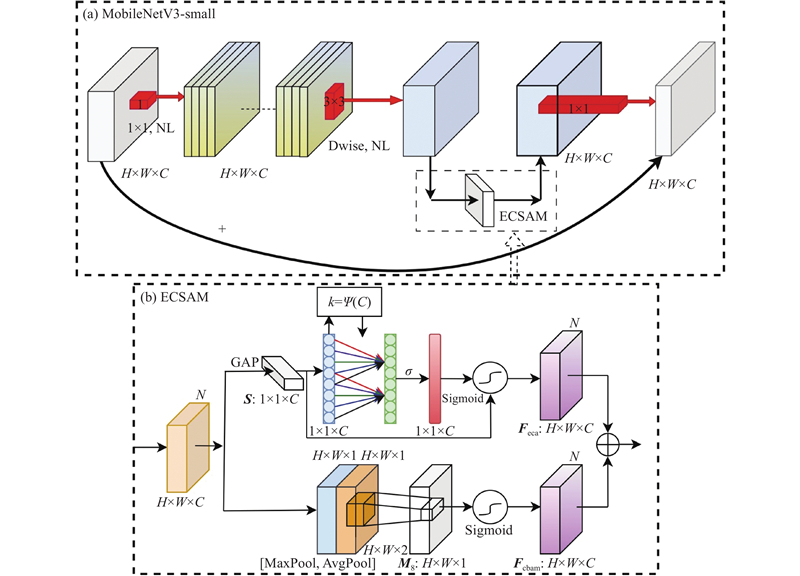
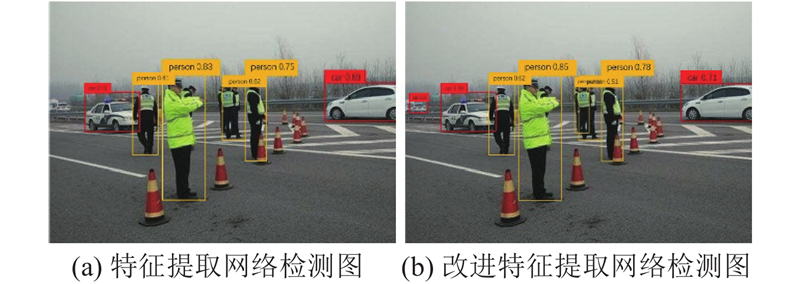
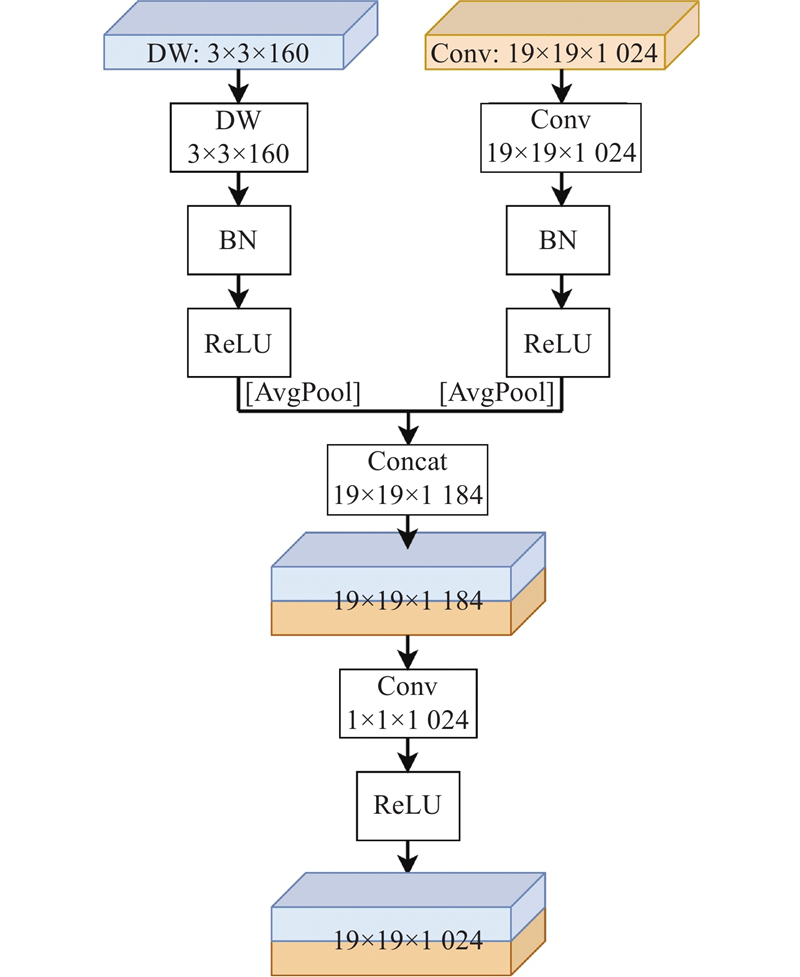
Abstract Two key technical improvements were proposed to address the issue of decreased target detection accuracy caused by target occlusion and fog interference in intelligent autonomous driving scenarios. Firstly, an improved detection method was proposed for the problem of target occlusion. A lightweight MobileNetV3_small with an integrated enhanced attention mechanism was used as the SSD backbone feature extraction network. The detection accuracy in occlusion scenarios was enhanced by combining a multi-scale feature fusion mechanism and an adaptive hyperparameter Soft-NMS algorithm. The confidence loss function was reconstructed by improving the adaptive Focal Loss to alleviate the imbalance between positive and negative samples and the sensitivity to noisy labels. Secondly, an improved lightweight AOD-Net defogging method was proposed to address the problem of target blurriness in foggy images. The image contrast was effectively enhanced and texture details were improved, by constructing a multi-scale feature extraction network based on depthwise separable convolution, optimizing the cross-layer connection structure, and introducing a boundary enhancement module. Finally, an end-to-end collaborative optimization of the defogging network and the detection network was achieved through a joint loss function, providing a more reliable optimization path for the detection task of occluded targets in foggy images. Experimental results showed that the joint optimization model improved the target detection performance in foggy occlusion scenarios, achieving efficient detection with an accuracy of 93.85% and a detection speed of 47.61 frames per second, and demonstrating excellent model robustness.
|
|
Received: 26 July 2025
Published: 19 March 2026
|
|
|
改进的有雾图像中被遮挡车辆及行人识别算法
针对智能自动驾驶场景中目标遮挡与雾天干扰导致的目标检测精度下降问题,提出2项关键技术改进. 针对目标遮挡问题提出改进检测方法,以集成增强注意力机制的轻量化MobileNetV3_small作为SSD骨干特征提取网络,结合多尺度特征融合机制与自适应超参数Soft-NMS算法提升遮挡场景下的检测精度,通过改进自适应Focal Loss重构置信度损失函数,缓解正负样本不平衡及噪声标签敏感性问题. 针对雾天图像中目标模糊的问题提出改进轻量化AOD-Net去雾方法,通过构建基于深度可分离卷积的多尺度特征提取网络,优化跨层连接结构并引入边界增强模块,有效提升图像对比度、增强纹理细节. 通过联合损失函数对去雾网络与检测网络进行端到端协同优化,为有雾图像中的遮挡目标检测任务提供更可靠的优化路径. 实验结果表明,联合优化模型提升了雾天遮挡场景下的目标检测性能,以93.85%的准确率和47.61帧/s的检测速度实现了高效检测,并表现出优异的模型鲁棒性.
关键词:
被遮挡目标,
雾天图像,
特征融合,
目标检测,
特征提取
|
|
| [1] |
TAHIR N U A, ZHANG Z, ASIM M, et al Object detection in autonomous vehicles under adverse weather: a review of traditional and deep learning approaches[J]. Algorithms, 2024, 17 (3): 103
doi: 10.3390/a17030103
|
|
|
| [2] |
ABDEL-ATY M, CAI Q, WU Y, et al Evaluation of automated emergency braking system’s avoidance of pedestrian crashes at intersections under occluded conditions within a virtual simulator[J]. Accident Analysis and Prevention, 2022, 176: 106797
doi: 10.1016/j.aap.2022.106797
|
|
|
| [3] |
SHETTY A, YU M, KURZHANSKIY A, et al Safety challenges for autonomous vehicles in the absence of connectivity[J]. Transportation Research Part C: Emerging Technologies, 2021, 128: 103133
doi: 10.1016/j.trc.2021.103133
|
|
|
| [4] |
MO Y, VIJAY R, RUFUS R, et al Enhanced perception for autonomous vehicles at obstructed intersections: an implementation of vehicle to infrastructure (V2I) collaboration[J]. Sensors, 2024, 24 (3): 936
doi: 10.3390/s24030936
|
|
|
| [5] |
ZHOU J, ZHANG D, ZOU P, et al Retinex-based Laplacian pyramid method for image defogging[J]. IEEE Access, 2019, 7: 122459- 122472
doi: 10.1109/ACCESS.2019.2934981
|
|
|
| [6] |
HE K, SUN J, TANG X Single image haze removal using dark channel prior[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 33 (12): 2341- 2353
doi: 10.18535/ijecs/v5i1.12
|
|
|
| [7] |
CAI B, XU X, JIA K, et al DehazeNet: an end-to-end system for single image haze removal[J]. IEEE Transactions on Image Processing, 2016, 25 (11): 5187- 5198
doi: 10.1109/TIP.2016.2598681
|
|
|
| [8] |
LIU W, YAO R, QIU G A physics based generative adversarial network for single image defogging[J]. Image and Vision Computing, 2019, 92: 103815
doi: 10.1016/j.imavis.2019.10.001
|
|
|
| [9] |
CAI D, BAMISILE O, ZHANG W, et al Anti-occlusion multi-object surveillance based on improved deep learning approach and multi-feature enhancement for unmanned smart grid safety[J]. Energy Reports, 2023, 9: 594- 603
doi: 10.1016/j.egyr.2023.01.074
|
|
|
| [10] |
TANG T, ZHOU S, DENG Z, et al Vehicle detection in aerial images based on region convolutional neural networks and hard negative example mining[J]. Sensors, 2017, 17 (2): 336
doi: 10.3390/s17020336
|
|
|
| [11] |
SU J, WANG F, ZHUANG W An improved YOLOv7 tiny algorithm for vehicle and pedestrian detection with occlusion in autonomous driving[J]. Chinese Journal of Electronics, 2025, 34 (1): 282- 294
doi: 10.23919/cje.2023.00.256
|
|
|
| [12] |
AGHAEE F, FAZL-ERSI E, NOORI H MDSSD-MobV2: an embedded deconvolutional multispectral pedestrian detection based on SSD-MobileNetV2[J]. Multimedia Tools and Applications, 2024, 83 (15): 43801- 43829
doi: 10.1007/s11042-023-17188-7
|
|
|
| [13] |
ZHANG C, WANG H, CAI Y, et al TransFusion: multi-modal robust fusion for 3D object detection in foggy weather based on spatial vision transformer[J]. IEEE Transactions on Intelligent Transportation Systems, 2024, 25 (9): 10652- 10666
doi: 10.1109/TITS.2024.3420432
|
|
|
| [14] |
LI B, PENG X, WANG Z, et al. AOD-net: all-in-one dehazing network [C]// Proceedings of the IEEE International Conference on Computer Vision. Venice: IEEE, 2017: 4780–4788.
|
|
|
| [15] |
LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot MultiBox detector [C]// Computer Vision – ECCV 2016. Cham: Springer, 2016: 21–37.
|
|
|
| [16] |
CAO Z, LI J, FANG L, et al Research on efficient classification algorithm for coal and gangue based on improved MobilenetV3-small[J]. International Journal of Coal Preparation and Utilization, 2025, 45 (2): 437- 462
doi: 10.1080/19392699.2024.2353128
|
|
|
| [17] |
HE H, LI Z, TIAN G, et al Towards accurate dense pedestrian detection via occlusion-prediction aware label assignment and hierarchical-NMS[J]. Pattern Recognition Letters, 2023, 174: 78- 84
doi: 10.1016/j.patrec.2023.08.019
|
|
|
| [18] |
LIU Y, LI D AdaXod: a new adaptive and momental bound algorithm for training deep neural networks[J]. The Journal of Supercomputing, 2023, 79 (15): 17691- 17715
doi: 10.1007/s11227-023-05338-5
|
|
|
| [19] |
ROLNICK D, VEIT A, BELONGIE S, et al. Deep learning is robust to massive label noise [EB/OL]. (2017−05−30) [2025−08−05]. https://doi.org/10.48550/arXiv.1705.10694.
|
|
|
| [20] |
ARAZO E, ORTEDO D, ALBERT P, et al. Unsupervised label noise modeling and loss cor-rection [C]// International Conference on Machine Learning. Long Beach: Curran Associates, Inc. 2019: 312–321.
|
|
|
| [21] |
ZHANG Z, SABUNCU M. Generalized cross entropy loss for training deep neural networks with noisy labels [EB/OL]. (2018−12−03) [2025−08−05]. https://proceedings.neurips.cc/paper/2018/hash/f2925f97bc13ad2852a7a551802feea0-Abstract.html.
|
|
|
| [22] |
LI B, REN W, FU D, et al. REalistic single image dehazing (RESIDE): a benchmark for single image dehazing [DS/OL]. (2017−12−01) [2025−08−05]. https://github.com/Boyiliee/RESIDE-dataset-link.
|
|
|
| [23] |
ZHANG S, BENENSON R, SCHIELE B. CityPersons: a diverse dataset for pedestrian detection [DS/OL]. (2017−08−09) [2025−08−05]. https://www.cityscapes-dataset.com/citypersonsdownload/.
|
|
|
| [24] |
CORDTS M, OMRAN M, RAMOS S. The cityscapes dataset for semantic urban scene understanding [DS/OL]. (2016−06−01) [2025−08−05]. https://www.cityscapes-dataset.com/.
|
|
|
| [25] |
都雪静, 刘世新. 基于改进AOD-Net的交通场景去雾算法 [EB/OL]. (2025−06−12). https://kns.cnki.net/kcms/detail/23.1498.N.20250611.1938.008.html.
|
|
|
| [26] |
张壮, 孟祥瑞 基于DCT-YOLO的密集遮挡行人检测算法[J]. 宁夏师范大学学报, 2025, 46 (7): 73- 85
ZHANG Zhuang, MENG Xiangrui Dense occlusion pedestrian detection algorithm based on DCT-YOLO[J]. Journal of Ningxia Normal University, 2025, 46 (7): 73- 85
doi: 10.3969/j.issn.1674-1331.2025.07.007
|
|
|
| [27] |
SU J, WANG F, ZHUANG W An improved YOLOv7 tiny algorithm for vehicle and pedestrian detection with occlusion in autonomous driving[J]. Chinese Journal of Electronics, 2025, 34 (1): 282- 294
doi: 10.23919/cje.2023.00.256
|
|
|
| [28] |
CHENG L, ZHANG D, ZHENG Y Road object detection in foggy complex scenes based on improved YOLOv8[J]. IEEE Access, 2024, 12: 107420- 107430
doi: 10.1109/ACCESS.2024.3438612
|
|
|
| [29] |
SHI X, SONG A Defog YOLO for road object detection in foggy weather[J]. The Computer Journal, 2024, 67 (11): 3115- 3127
doi: 10.1093/comjnl/bxae074
|
|
|
| [30] |
LIU Z, YAN J, ZHANG J Research on a recognition algorithm for traffic signs in foggy environments based on image defogging and transformer[J]. Sensors, 2024, 24 (13): 4370
doi: 10.3390/s24134370
|
|
|
| [31] |
SU J, MAO S, ZHUANG W AOYOLO algorithm oriented vehicle and pedestrian detection in foggy weather[J]. Chinese Journal of Electronics, 2025, 34 (2): 661- 672
doi: 10.23919/cje.2023.00.280
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|