| Electric Engineering, Mechanical Engineering |
|


|
|
|
| Static and dynamic characteristics of soft unit based on hydraulic straight drive |
Ying-long CHEN( ),Di YAN,Zeng-meng ZHANG*(),Da-yong NING,Yong-jun GONG ),Di YAN,Zeng-meng ZHANG*(),Da-yong NING,Yong-jun GONG |
| Naval Architecture and Ocean Engineering College, Dalian Maritime University, Dalian 116026, China |
|
|
|
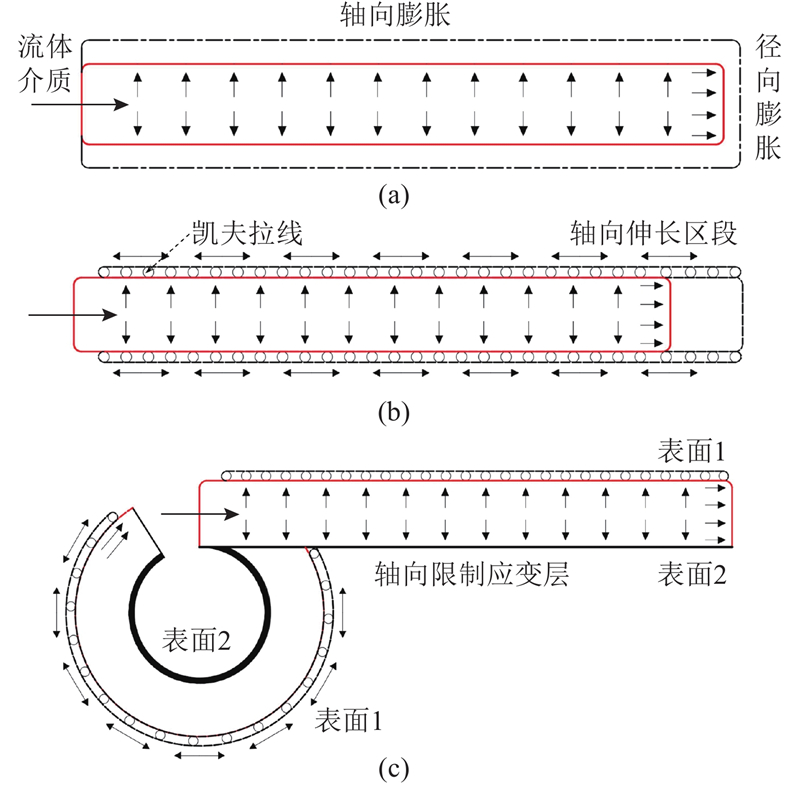
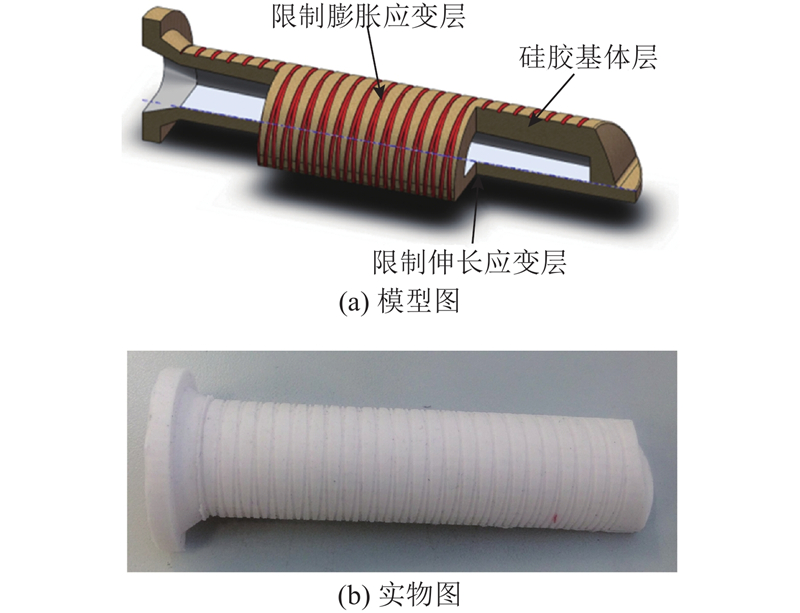
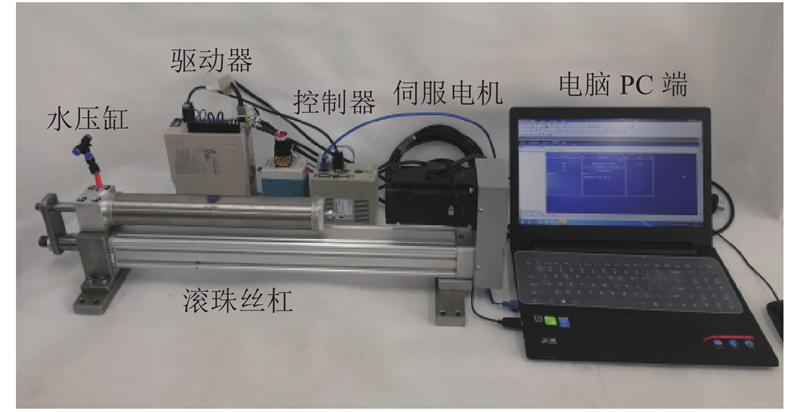
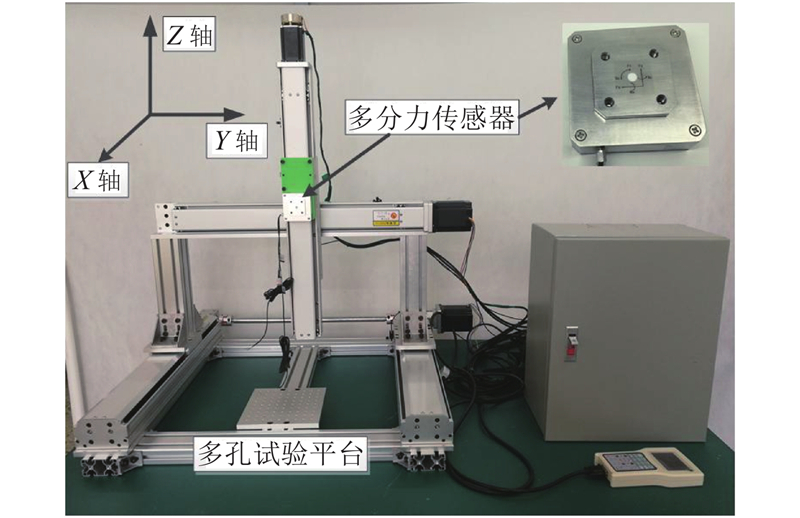
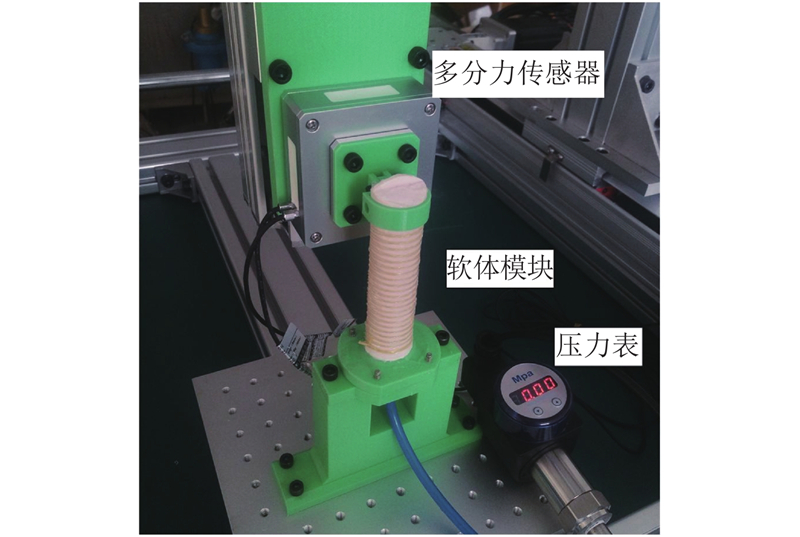
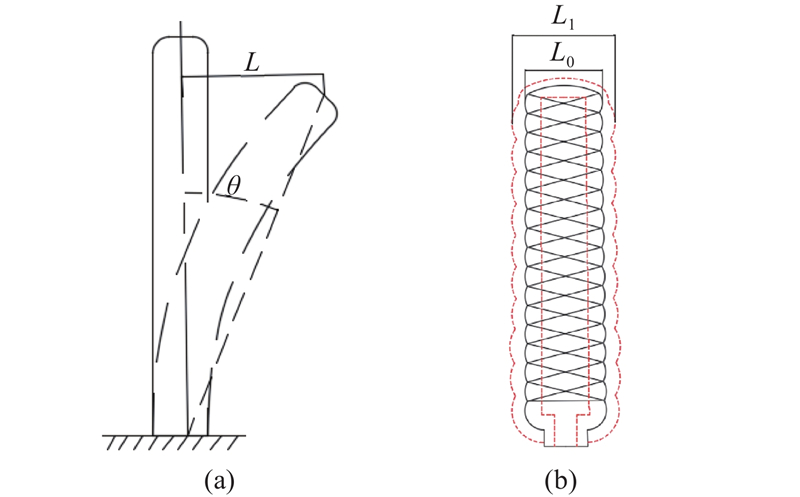
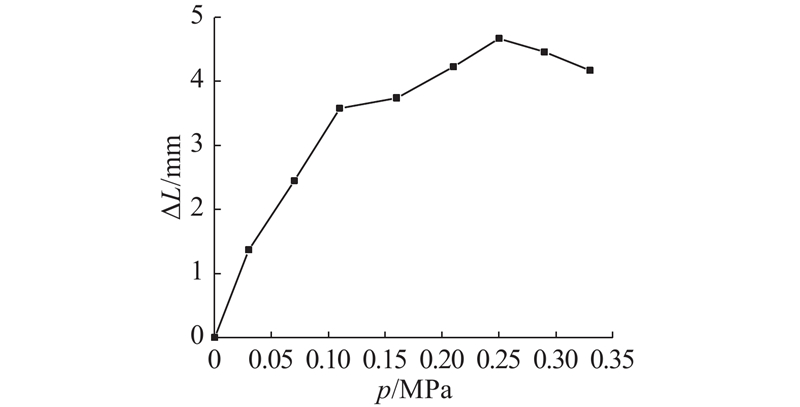
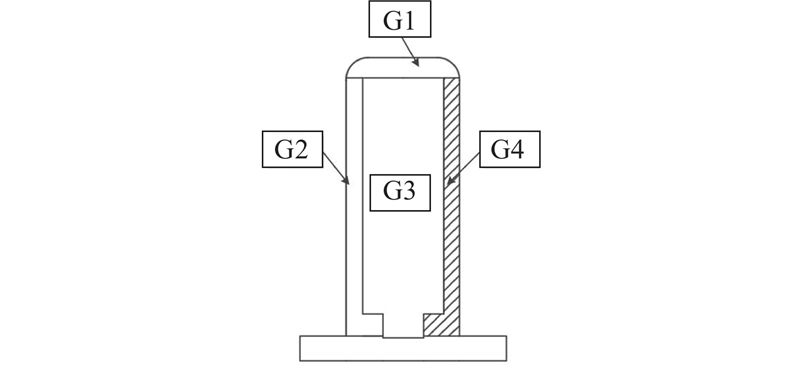
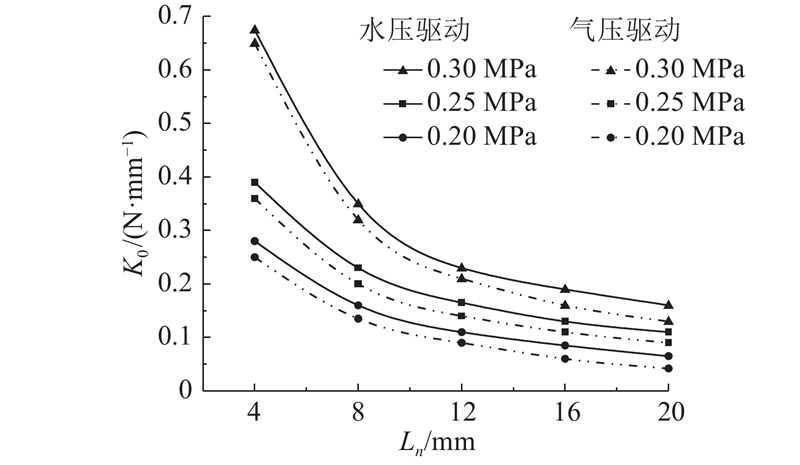
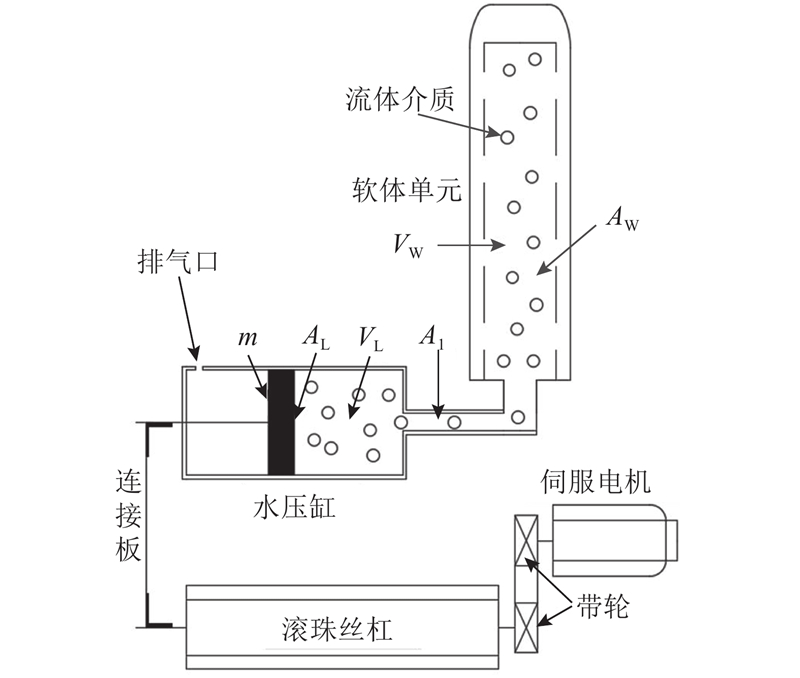
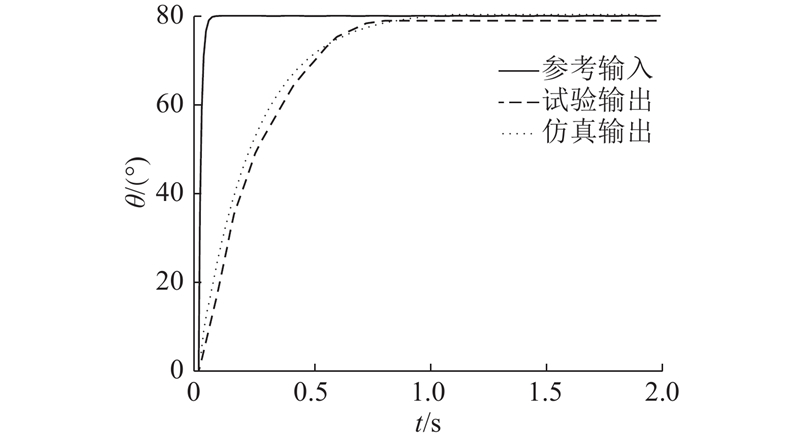
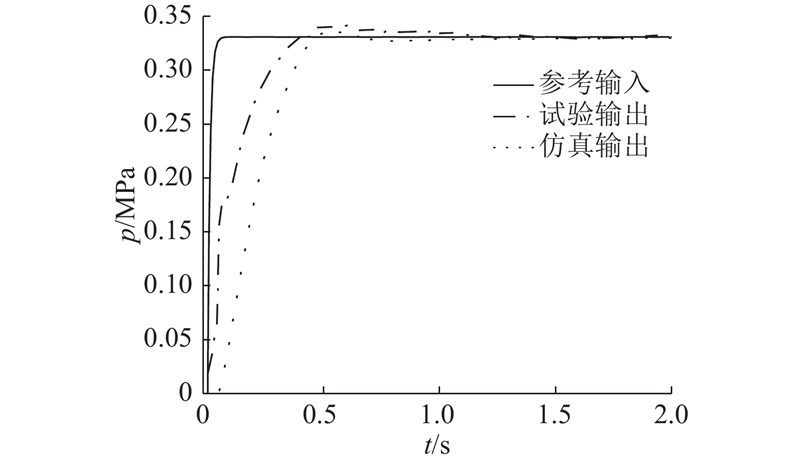
Abstract A fiber-reinforced soft unit directly driven by water pressure was proposed and the servo motor was used to drive the hydraulic cylinder to realize the motion control of the soft unit. The static and dynamic characteristics of soft units were studied by setting up a test bed. Static tests were carried out on output force, radial expansion, bending angle and stiffness of the soft unit. Results showed that the driving force of the soft unit was the main factor affecting the output force and the bending angle. The maximum radial expansion rate of the soft unit was 3% as the input pressure increased. When the input pressure was 0.3 MPa and the end displacement was 4 mm, the output force of hydraulic drive was 4.3 N, and the stiffness of soft unit was 0.025 N/mm higher than that in the situation of air pressure drive. The dynamic model of soft unit was established, and the simulation analysis and experimental verification were conducted on the bending angle and the pressure response of the soft unit. Results showed that the simulation results of the hydraulic straight drive soft unit model were in good agreement with the measured results. The stability error values of bending angle and driving water pressure were 1.70% and 0.33%, respectively. Results show that water hydraulic drive can improve the performance of soft robots.
|
|
Received: 10 August 2018
Published: 13 August 2019
|
|
|
|
Corresponding Authors:
Zeng-meng ZHANG
E-mail: chenyinglong@dlmu.edu.cn;zzm.zju@163.com
|
基于水压直驱的软体单元的动静态特性
提出水压直驱纤维增强软体单元,采用伺服电机驱动水压缸实现软体运动控制,搭建试验台开展软体单元动静态特性研究. 针对软体单元输出力、径向膨胀、弯曲角度及刚度等性能开展静态试验. 结果表明,软体单元驱动压力为影响输出力和弯曲角度的主要因素;当输入压力增加时,软体最大径向膨胀速率为3%;当输入压力为0.3 MPa、末端位移为4 mm时,水压驱动输出力为4.3 N,与气压驱动相比,软体刚度增加0.025 N/mm. 建立水压直驱软体单元动力学模型,围绕软体单元弯曲角度、压力响应进行仿真分析及试验验证. 结果表明,水压直驱软体单元模型仿真与实测结果较吻合,弯曲角度稳定误差为1.70%,驱动水压稳定误差为0.33%. 研究成果表明采用水液压驱动软体机器人可提高其性能.
关键词:
水压直驱,
纤维增强,
软体单元,
动静态特性,
动力学模型
|
|
| [1] |
MAO S, DONG E, JIN H, et al Gait study and pattern generation of a starfish-like soft robot with flexible rays actuated by SMAs[J]. Journal of Bionic Engineering, 2014, 11: 400- 411
doi: 10.1016/S1672-6529(14)60053-6
|
|
|
| [2] |
TOLLEY M T, SHEPHERD R F, MOSADEGH B, et al A resilient, untethered soft robot[J]. Soft Robotics, 2014, 1 (3): 213- 223
doi: 10.1089/soro.2014.0008
|
|
|
| [3] |
FEI Y, PANG W Analysis on nonlinear turning motion of multi-spherical soft robots[J]. Nonlinear Dynamics, 2016, 1: 1- 10
|
|
|
| [4] |
ANDRIKOPOULOS G, NIKOLAKOPOULOS G, MANESIS S. A survey on applications of pneumatic artificial muscles [C]// Control and Automation. [S.l.]: IEEE, 2011: 1439-1446.
|
|
|
| [5] |
MOSASWGH B, POLYGERINOS P, KEPLINGER C, et al Pneumatic networks for soft robotics that actuate rapidly[J]. Advanced Functional Materials, 2014, 24 (15): 2163- 2170
doi: 10.1002/adfm.v24.15
|
|
|
| [6] |
MARCHESE A D, ONAL C D, RUS D Autonomous soft robotic fish capable of escape maneuvers using fluidic elastomer actuators[J]. Soft Robotics, 2014, 1 (1): 75- 87
doi: 10.1089/soro.2013.0009
|
|
|
| [7] |
SFAKIOTAKIS M, KAZAKIDI A, TSAKIRIS D P Octopus-inspired multi-arm robotic swimming[J]. Bioinspiration and Biomimetics, 2015, 10 (3): 035005
doi: 10.1088/1748-3190/10/3/035005
|
|
|
| [8] |
HAO Y F, GONG Z Y, XIE Z X, et al. Universal soft pneumatic robotic gripper with variable effective length [C]// Proceedings of the 35th Chinese Control Conference. Chengdu: IEEE, 2016: 7554316.
|
|
|
| [9] |
DEIMEL R, BROCK O A novel type of compliant and underactuated robotic hand for dexterous grasping[J]. International Journal of Robotics Research, 2015, 35 (1): 161- 185
|
|
|
| [10] |
MORIN S A, SHEPHERD R F, KWOK S W, et al Camouflage and display for soft machines[J]. Science, 2012, 337 (6096): 828- 832
doi: 10.1126/science.1222149
|
|
|
| [11] |
LIN H T, LEISK G G, TRIMMER B GoQBot: a caterpillar-inspired soft-bodied rolling robot[J]. Bioinspiration and Biomimetics, 2011, 6 (2): 026007
doi: 10.1088/1748-3182/6/2/026007
|
|
|
| [12] |
杜勇. 具有多运动模式的可变形软体机器人研究[D]. 合肥: 中国科学技术大学, 2013.
DU Yong. Research on flexible soft robot with multi-motion mode [D]. Hefei: University of Science and Technology of China, 2013.
|
|
|
| [13] |
SHEPHERD R F, ILIEVSKI F, CHOI W, et al Multigait soft robot[J]. Proceedings of the National Academy of Sciences, 2011, 108 (51): 20400- 20403
doi: 10.1073/pnas.1116564108
|
|
|
| [14] |
POLYGERINOS P, WANG Z, GALLOWAY K C, et al Soft robotic glove for combined assistance and at-home rehabilitation[J]. Robotics and Autonomous Systems, 2015, 73 (C): 135- 143
|
|
|
| [15] |
YOSHINADA H, YAMAZAKI T, SUWA T, et al. Seawater hydraulic actuator system for underwater manipulator [C]// Proceedings of the 5th International Conference on Advanced Robotics. Pisa: [s.n.], 1991: 1330-1335.
|
|
|
| [16] |
MAYUKO M, KOICHI S, MASAYUKI T, et al Very high force hydraulic McKibben artificial muscle with a p-phenylene-2,6-benzobisoxazole cord sleeve[J]. Advanced Robotics, 2010, 24 (1/2): 233- 254
|
|
|
| [17] |
刘桓龙, 许明恒, 柯坚, 等 水压驱动技术[J]. 中国机械工程, 2002, 13 (6): 534- 536
LIU Huan-long, XU Ming-heng, KE Jian, et al Hydraulic drive technology[J]. China Mechanical Engineering, 2002, 13 (6): 534- 536
doi: 10.3321/j.issn:1004-132X.2002.06.026
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|