| 计算机与控制工程 |
|

|
|
|
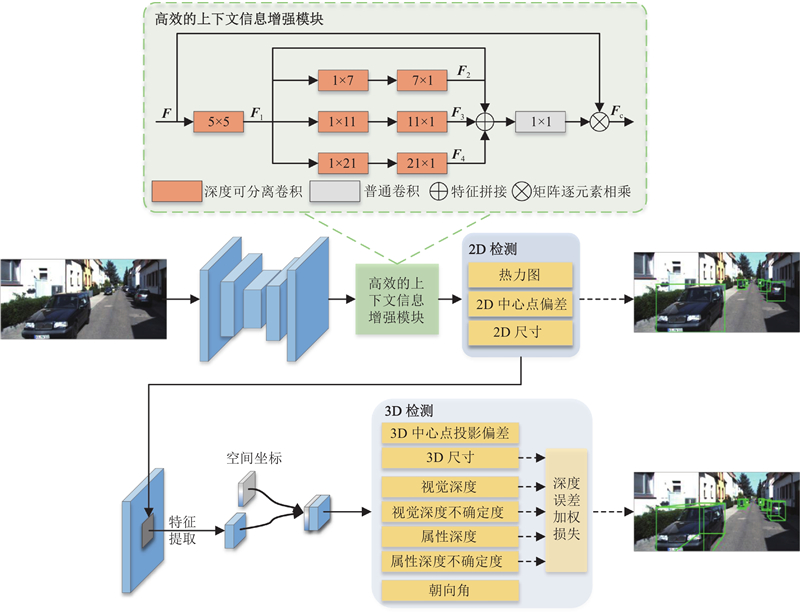
| 基于上下文信息增强和深度引导的单目3D目标检测 |
于家艺1( ),吴秦1,2,*() ),吴秦1,2,*() |
1. 江南大学 人工智能与计算机学院,江苏 无锡 214122
2. 江南大学 江苏省模式识别与计算智能工程实验室,江苏 无锡 214122 |
|
| Monocular 3D object detection based on context information enhancement and depth guidance |
| Jiayi YU1(),Qin WU1,2,*() |
1. School of Artificial Intelligence and Computer Science, Jiangnan University, Wuxi 214122, China
2. Jiangsu Provincial Engineering Laboratory of Pattern Recognition and Computing Intelligence, Jiangnan University, Wuxi 214122, China |
| 1 |
LIU Y X, YUAN Y X, LIU M Ground-aware monocular 3D object detection for autonomous driving[J]. IEEE Robotics and Automation Letters, 2021, 6 (2): 919- 926
doi: 10.1109/LRA.2021.3052442
|
| 2 |
SIMONELLI A, BULÒ S R, PORZI L, et al. Disentangling monocular 3D object detection [C]// IEEE/CVF International Conference on Computer Vision . Seoul: IEEE, 2019: 1991–1999.
|
| 3 |
WANG Y, CHAO W L, GARG D, et al. Pseudo-LiDAR from visual depth estimation: bridging the gap in 3D object detection for autonomous driving [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . Long Beach: IEEE, 2019: 8445–8453.
|
| 4 |
MA X Z, LIU S N, XIA Z Y, et al. Rethinking pseudo-LiDAR representation [C]// European Conference on Computer Vision . Glasgow: Springer, 2020: 311–327.
|
| 5 |
PENG L, LIU F, YU Z X, et al. LiDAR point cloud guided monocular 3D object detection [C]// European Conference on Computer Vision . Tel Aviv: Springer, 2022: 123–139.
|
| 6 |
HONG Y, DAI H, DING Y. Cross-modality knowledge distillation network for monocular 3D object detection [C]// European Conference on Computer Vision . Tel Aviv: Springer, 2022: 87–104.
|
| 7 |
LIU Z D, ZHOU D F, LU F X, et al. AutoShape: real-time shape-aware monocular 3D object detection [C]/ / IEEE/CVF International Conference on Computer Vision . Montreal: IEEE, 2021: 15641–15650.
|
| 8 |
张峻宁, 苏群星, 刘鹏远, 等 基于空间约束的自适应单目3D物体检测算法[J]. 浙江大学学报: 工学版, 2020, 54 (6): 1138- 1146
ZHANG Junning, SU Qunxing, LIU Pengyuan, et al Adaptive monocular 3D object detection algorithm based on spatial constraint[J]. Journal of Zhejiang University: Engineering Science, 2020, 54 (6): 1138- 1146
|
| 9 |
LI Y Y, CHEN Y T, HE J W, et al. Densely constrained depth estimator for monocular 3D object detection [C]// European Conference on Computer Vision . Tel Aviv: Springer, 2022: 718–734.
|
| 10 |
LU Y, MA X Z, YANG L, et al. Geometry uncertainty projection network for monocular 3D object detection [C]// IEEE/CVF International Conference on Computer Vision . Montreal: IEEE, 2021: 3111–3121.
|
| 11 |
LIU Z C, WU Z Z, TÓTH R. SMOKE: single-stage monocular 3D object detection via keypoint estimation [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops . Seattle: IEEE, 2020: 996–997.
|
| 12 |
BRAZIL G, LIU X M. M3D-RPN: monocular 3D region proposal network for object detection [C]// IEEE/CVF International Conference on Computer Vision . Seoul: IEEE, 2019: 9287–9296.
|
| 13 |
ZHANG R R, QIU H, WANG T, et al. MonoDETR: depth-guided transformer for monocular 3D object detection [C]// IEEE/CVF International Conference on Computer Vision . Paris: IEEE, 2023: 9155–9166.
|
| 14 |
HUANG K C, WU T H, SU H T, et al. MonoDTR: monocular 3D object detection with depth-aware transformer [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . New Orleans: IEEE, 2022: 4012–4021.
|
| 15 |
YU F, WANG D Q, SHELHAMER E, et al. Deep layer aggregation [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . Salt Lake City: IEEE, 2018: 2403–2412.
|
| 16 |
ZHOU X Y, WANG D Q, KRÄHENBÜHL P. Objects as points [EB/OL]. (2019–04–25)[2023–11–29]. https://arxiv.org/pdf/1904.07850.
|
| 17 |
PENG L, WU X P, YANG Z, et al. DID-M3D: decoupling instance depth for monocular 3D object detection [C]// European Conference on Computer Vision . Tel Aviv: Springer, 2022: 71–88.
|
| 18 |
GEIGER A, LENZ P, URTASUN R. Are we ready for autonomous driving? The KITTI vision benchmark suite [C]// IEEE Conference on Computer Vision and Pattern Recognition . Providence: IEEE, 2012: 3354–3361.
|
| 19 |
MOUSAVIAN A, ANGUELOV D, FLYNN J, et al. 3D bounding box estimation using deep learning and geometry [C]// IEEE Conference on Computer Vision and Pattern Recognition . Honolulu: IEEE, 2017: 7074–7082.
|
| 20 |
SUN P, KRETZSCHMAR H, DOTIWALLA X, et al. Scalability in perception for autonomous driving: Waymo open dataset [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . Seattle: IEEE, 2020: 2446–2454.
|
| 21 |
READING C, HARAKEH A, CHAE J, et al. Categorical depth distribution network for monocular 3D object detection [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . Nashville: IEEE, 2021: 8555–8564.
|
| 22 |
MA X Z, ZHANG Y M, XU D, et al. Delving into localization errors for monocular 3D object detection [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . Nashville: IEEE, 2021: 4721–4730.
|
| 23 |
KUMAR A, BRAZIL G, LIU X M. GrooMeD-NMS: grouped mathematically differentiable NMS for monocular 3D object detection [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . Nashville: IEEE, 2021: 8973–8983.
|
| 24 |
ZHOU Y S, HE Y, ZHU H Z, et al. Monocular 3D object detection: an extrinsic parameter free approach [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . Nashville: IEEE, 2021: 7556–7566.
|
| 25 |
ZHANG Y P, LU J W, ZHOU J. Objects are different: flexible monocular 3D object detection [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . Nashville: IEEE, 2021: 3289–3298.
|
| 26 |
WANG L, ZHANG L, ZHU Y, et al. Progressive coordinate transforms for monocular 3D object detection [C]// The 35th International Conference on Neural Information Processing Systems . [S. l.]: Curran Associates, 2021: 13364–13377.
|
| 27 |
QIN Z Q, LI X. MonoGround: detecting monocular 3D objects from the ground [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . New Orleans: IEEE, 2022: 3793–3802.
|
| 28 |
GU J Q, WU B J, FAN L B, et al. Homography loss for monocular 3D object detection [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . New Orleans: IEEE, 2022: 1080–1089.
|
| 29 |
LIAN Q, LI P L, CHEN X Z. MonoJSG: joint semantic and geometric cost volume for monocular 3D object detection [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . New Orleans: IEEE, 2022: 1070–1079.
|
| 30 |
KUMAR A, BRAZIL G, CORONA E, et al. DEVIANT: depth equivariant network for monocular 3D object detection [C]// European Conference on Computer Vision . Tel Aviv: Springer, 2022: 664–683.
|
| 31 |
ZHOU Z Y, DU L, YE X Q, et al SGM3D: stereo guided monocular 3D object detection[J]. IEEE Robotics and Automation Letters, 2022, 7 (4): 10478- 10485
doi: 10.1109/LRA.2022.3191849
|
| 32 |
LIU X P, XUE N, WU T F. Learning auxiliary monocular contexts helps monocular 3D object detection [C]// AAAI Conference on Artificial Intelligence . Vancouver: AAAI, 2022: 1810–1818.
|
| 33 |
SHI X P, CHEN Z X, KIM T K. Multivariate probabilistic monocular 3D object detection [C]// IEEE/CVF Winter Conference on Applications of Computer Vision . Waikoloa: IEEE, 2023: 4281–4290.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|