| 智能机器人 |
|

|
|
|
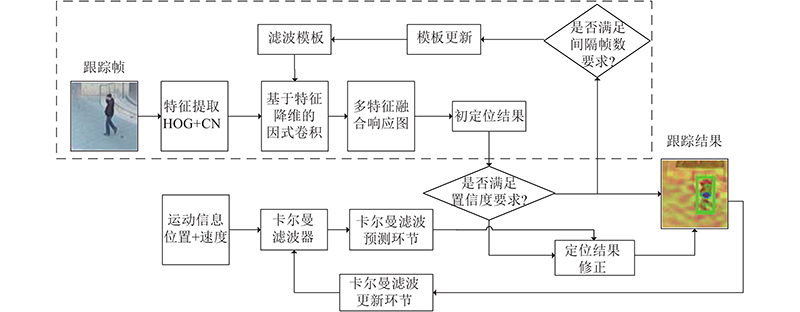
| 融合运动信息和跟踪评价的高效卷积算子 |
张迅1( ),李建胜1,*(),欧阳文1,陈润泽1,汲振1,郑凯2 ),李建胜1,*(),欧阳文1,陈润泽1,汲振1,郑凯2 |
1. 战略支援部队信息工程大学 地理空间信息学院,河南 郑州 450001
2. 73159部队,福建 泉州 362110 |
|
| Efficient convolution operators integrating motion information and tracking evaluation |
| Xun ZHANG1(),Jian-sheng LI1,*(),Wen OUYANG1,Run-ze CHEN1,Zhen JI1,Kai ZHENG2 |
1. Institute of Geographical Spatial Information, Information Engineering University, zhengzhou 450001, China
2. 73159 Troops, Quanzhou 362100, China |
引用本文:
张迅,李建胜,欧阳文,陈润泽,汲振,郑凯. 融合运动信息和跟踪评价的高效卷积算子[J]. 浙江大学学报(工学版), 2022, 56(6): 1135-1143, 1167.
Xun ZHANG,Jian-sheng LI,Wen OUYANG,Run-ze CHEN,Zhen JI,Kai ZHENG. Efficient convolution operators integrating motion information and tracking evaluation. Journal of ZheJiang University (Engineering Science), 2022, 56(6): 1135-1143, 1167.
链接本文:
https://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2022.06.010
或
https://www.zjujournals.com/eng/CN/Y2022/V56/I6/1135
|
| 1 |
陈政. 智能监控系统中运动检测与目标跟踪模块的设计与实现[D]. 哈尔滨: 哈尔滨工业大学, 2020: 11-21.
CHEN Zheng. Design and implementation of motion detection and tracking module in intelligent surveilance system [D]. Harbin: Harbin Institute of Technology, 2020: 11-21.
|
| 2 |
黄石磊. 基于视觉计算的运动目标跟踪及异常行为分析[D]. 郑州: 郑州大学, 2014: 42-47.
HUANG Shi-lei. Moving target tracking and abnormal behavior analysis based on visual calculation [D]. Zhengzhou: Zhengzhou University, 2014: 42-47.
|
| 3 |
吴昊, 姜文斌, 陆增洁, 等 机器人视觉动态目标跟踪的最优方案研究[J]. 信息与电脑, 2020, (1): 129- 130
WU Hao, JIANG Wen-bin, LU Zeng-jie, et al Research on optimal scheme of robot vision dynamic target tracking[J]. China Computer and Communication, 2020, (1): 129- 130
|
| 4 |
程相博, 李建胜, 胡鹏, 等 改进的GOTURN算法[J]. 测绘科学技术学报, 2018, 35 (6): 605- 608
CHENG Xiang-bo, LI Jian-sheng, HU Peng, et al An improved algorithm of the generic object tracking using regression networks[J]. Journal of Geomatics Science and Technology, 2018, 35 (6): 605- 608
|
| 5 |
葛宝义, 左宪章, 胡永江 视觉目标跟踪方法研究综述[J]. 中国图象图形学报, 2018, 23 (8): 1091- 1107
GE Bao-yi, ZUO Xian-zhang, HU Yong-jiang Review of visual object tracking technology[J]. Journal of Image and Graphics, 2018, 23 (8): 1091- 1107
doi: 10.11834/jig.170604
|
| 6 |
BOLME D S, BEVERIDGE J R, DRAPER B A , et al. Visual object tracking using adaptive correlation filters [C]// 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. San Francisco: IEEE, 2010: 2544-2550.
|
| 7 |
HENRIQUES J F, CASEIRO R, MARTINS P, et al. Exploiting the circulant structure of tracking-by-detection with kernels[C]//Proceedings of European Conference on Computer Vision. Berlin: Springer Verlag, 2012: 702-715.
|
| 8 |
HENRIQUES J F, CASEIRO R, MARTINS P, et al High-speed tracking with kernelized correlation filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37 (3): 583- 596
doi: 10.1109/TPAMI.2014.2345390
|
| 9 |
DANELLJAN M, HÄGER G, KHAN F S, et al Discriminative scale space tracking[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39 (8): 1561- 1575
doi: 10.1109/TPAMI.2016.2609928
|
| 10 |
LI Y, ZHU J. A Scale adaptive kernel correlation filter tracker with feature integration [M]// AGAPITO L, BRONSTEIN M, ROTHER C, et al. Computer vision: ECCV 2014. [S.l.]: Springer, 2014: 254-265.
|
| 11 |
DANELLJAN M, HÄGER G, KHAN F S, et al. Learning spatially regularized correlation filters for visual tracking [C]// 2015 IEEE International Conference on Computer Vision. Santiago: IEEE, 2015: 4310-4318.
|
| 12 |
DANELLJAN M, HÄGER, KHAN F S, et al. Adaptive decontamination of the training set: a unified formulation for discriminative visual tracking [C]// 2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2016: 1430-1438.
|
| 13 |
DANELLJAN M, HÄGER G, KHAN F S, et al. Beyond correlation filters: Learning continuous convolution operators for visual tracking [C]// European Conference on Computer Vision. Amsterdam: Springer, 2016: 472-488.
|
| 14 |
DANELLJAN M, BHAT G, KHAN F S, et al. ECO: efficient convolution operators for tracking [C]// 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu: IEEE, 2017: 6638-6646.
|
| 15 |
FELZENSZWALB P F, GIRSHICK R B, MCALLESTER D, et al Object detection with discriminatively trained part-based models[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32 (9): 1627- 1645
doi: 10.1109/TPAMI.2009.167
|
| 16 |
DANELLJAN M, KHAN F S, FELSBERG M, et al. Adaptive color attributes for real-time visual tracking [C]// 2014 IEEE Conference on Computer Vision and Pattern Recognition. Columbus: IEEE, 2014: 1090-1097.
|
| 17 |
WANG M, LIU Y, HUANG Z. Large margin object tracking with circulant feature maps [C]// 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu: IEEE, 2017: 4800-4808.
|
| 18 |
周勇. 改进的卡尔曼滤波在目标跟踪中的应用[D]. 哈尔滨: 哈尔滨工程大学, 2016: 19-29.
ZHOU Yong. Application of the improved Kalman filter in target tracking [D]. Harbin: Harbin Institute of Technology, 2016: 19-29.
|
| 19 |
WU Y, LIM J, YANG M H Object tracking benchmark[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37 (9): 1834- 1848
doi: 10.1109/TPAMI.2014.2388226
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|