并联机器人在机构刚度、运动精度、负载能力、力矩分布、稳定性和速度等方面具有显著优势[1 ] 。3-P(2-SS)机构由3个并联的移动副(P)驱动,每个移动副与动平台之间通过2条并联的运动链连接,每条运动链由2个球铰(S)及其之间的连杆构成。该机构常用于3D打印机、Delta机器人等。国内外学者对3-P(2-SS)机器人的研究多集中于其传统构形,即机构的3个移动副竖直均布于动平台工作空间的外侧,动平台横向工作空间有限。本文以驱动副共面平行的3-P(2-SS)型并联机器人为研究对象,分析其运动特性及动力学性能。该机器人由于3个移动副共面且位于动平台上部,动平台沿移动副方向的运动范围可随着移动副滑轨的伸长而增大,因此其更适合在狭长区域进行物品分拣、包装、搬运等工作。
国内外学者对机器人进行自由度分析时,对于简单机构,常采用Grubler-Kutzbach公式进行计算[2 -3 ] ;对于复杂的多支链或过约束机构,常采用李群与李代数及螺旋理论进行分析[4 -7 ] ;对于特定形位的自由度,常采用雅可比矩阵法分析其奇异性[3 ,8 ] 。本文利用机器人运动学方程和螺旋理论,对机器人的自由度进行分析,以简化其运动学方程与雅可比矩阵。
对机器人灵巧性进行分析时,学者们常采用可达工作空间、全姿态工作空间、灵活度等指标评价机器人的工作空间[9 -12 ] ,采用雅可比矩阵条件数、可操作度、最小奇异值等指标评价机器人的运动性能[11 ,13 -14 ] ,采用力传递效率等指标评价机器人的动力学性能[7 ] 。本文采用分析并联机器人时常用的雅可比矩阵条件数指标,根据简化后的雅可比矩阵,通过机器人移动副取不同运动学逆解时的灵巧性分析,来确定机器人动平台最佳运动范围和移动副最佳运动学逆解位置。
针对并联机器人的动力学研究,主要集中在高效高精度动力学建模[6 ,15 ] 、刚柔耦合动力学分析[16 ] 、高精度控制驱动系统分析[17 ] 等方面,而对于机器人机构中局部自由度的处理鲜有讨论。本文针对2-SS双球铰运动链中局部自由度导致的运动不确定性问题,利用最小角速度假设,采用机构近似替代法,求解机器人动力学方程,并进行运动仿真验证。
1 驱动副共面平行3-P(2-SS) 机器人运动机构设计
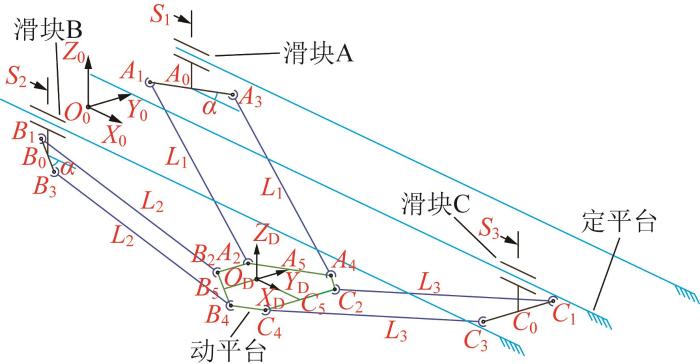
驱动副共面平行3-P(2-SS)机器人的运动机构如图1 所示。在机器人定平台上设置静坐标系{ O 0 } { O D } 表1 所示。
图1
图1
驱动副共面平行3-P(2-SS) 机器人运动机构简图
Fig.1
Motion mechanism schematic of 3-P(2-SS) robot with coplanar parallel driving pairs
2 驱动副共面平行3-P(2-SS) 机器人运动学方程
设动坐标系{ O D } O D { O 0 }
0 D = x D y D z D
设3个滑块上A 0 B 0 C 0 X 0 向的位移分别为S 1 S 2 S 3 X 0 向的位移分别为S A 1 S A 3 S B 1 S B 3 S C 1 S C 3 { O 0 }
0 A 1 = S A 1 E - T s α 0 T 0 A 3 = S A 3 E + T s α 0 T 0 B 1 = S B 1 - E + T s α 0 T 0 B 3 = S B 3 - E - T s α 0 T 0 C 1 = S C 1 T 0 T 0 C 3 = S C 3 - T 0 T
动平台上各球铰铰点在动坐标系{ O D }
D A 2 = - T c α M - T s α 0 T D A 4 = T c α M + T s α 0 T D B 2 = - T c α - M + T s α 0 T D B 4 = T c α - M - T s α 0 T D C 2 = N T 0 T D C 4 = N - T 0 T
设动坐标系{ O D } { O 0 } X 0 轴旋转ψ Y 0 轴旋转θ Z 0 轴旋转ϕ { O D } { O 0 } D 0 R
D 0 R = R o t z , ϕ R o t y , θ R o t x , ψ = c ϕ c θ c ϕ s θ s ψ - s ϕ c ψ c ϕ s θ c ψ + s ϕ s ψ s ϕ c θ s ϕ s θ s ψ + c ϕ c ψ s ϕ s θ c ψ - c ϕ s ψ - s θ c θ s ψ c θ c ψ
则动平台上球铰铰点在静坐标系{ O 0 }
0 A 2 = R D 0 A D A 2 + D 0 0 A 4 = R D 0 A D A 4 + D 0 0 B 2 = R D 0 B D B 2 + D 0 0 B 4 = R D 0 B D B 4 + D 0 0 C 2 = R D 0 C D C 2 + D 0 0 C 4 = R D 0 C D C 4 + D 0
A 1 A 2 = A 3 A 4 = L 1 B 1 B 2 = B 3 B 4 = L 2 C 1 C 2 = C 3 C 4 = L 3
f ( 1 ) = [ A 0 A 1 - A 0 A 2 ] T [ A 0 A 1 - A 0 A 2 ] - L 1 2 = 0 f ( 2 ) = [ B 0 B 1 - B 0 B 2 ] T [ B 0 B 1 - B 0 B 2 ] - L 2 2 = 0 f ( 3 ) = [ C 0 C 1 - C 0 C 2 ] T [ C 0 C 1 - C 0 C 2 ] - L 3 2 = 0 f ( 4 ) = [ A 0 A 3 - A 0 A 4 ] T [ A 0 A 3 - A 0 A 4 ] - L 1 2 = 0 f ( 5 ) = [ B 0 B 3 - B 0 B 4 ] T [ B 0 B 3 - B 0 B 4 ] - L 2 2 = 0 f ( 6 ) = [ C 0 C 3 - C 0 C 4 ] T [ C 0 C 3 - C 0 C 4 ] - L 3 2 = 0
式(1)至式(4)代入式(7)得到的运动学方程组展开式中,L 1 、L 2 、L 3 、M N E α T q
q = S A 1 S A 3 S B 1 S B 3 S C 1 S C 3 T
x D y D z D ψ θ ϕ x
x = x D y D z D ψ θ ϕ T
f x , q = 0 6 × 1
求解机器人运动学正解为已知q x
S A 1 - S A 3 = - 2 T c α S B 1 - S B 3 = - 2 T c α S C 1 - S C 3 = 0
∂ f ∂ x x ˙ + ∂ f ∂ q q ˙ = 0 6 × 1
J x = ∂ f ∂ x = ∂ f 1 ∂ x D ∂ f 1 ∂ y D ⋯ ∂ f 1 ∂ ϕ ∂ f 2 ∂ x D ∂ f 2 ∂ y D ⋯ ∂ f 2 ∂ ϕ ⋮ ⋮ ⋮ ∂ f 6 ∂ x D ∂ f 6 ∂ y D ⋯ ∂ f 6 ∂ ϕ
J q = - ∂ f ∂ q = - ∂ f 1 ∂ S A 1 ∂ f 1 ∂ S A 3 ⋯ ∂ f 1 ∂ S C 3 ∂ f 2 ∂ S A 1 ∂ f 2 ∂ S A 3 ⋯ ∂ f 2 ∂ S C 3 ⋮ ⋮ ⋮ ∂ f 6 ∂ S A 1 ∂ f 6 ∂ S A 3 ⋯ ∂ f 6 ∂ S C 3
J x x ˙ = J q q ˙
q ˙ = J x ˙ J = J q - 1 J x
3 驱动副共面平行3-P(2-SS) 机器人自由度分析
3.1 基于运动学方程的自由度分析
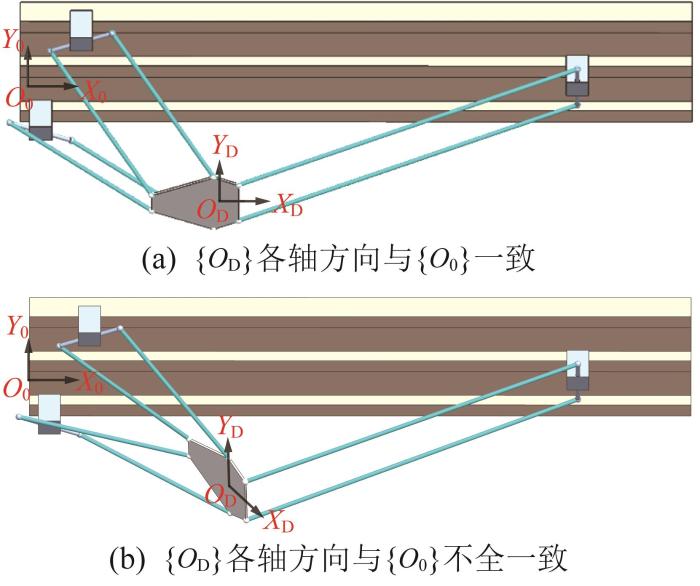
求解机器人运动学正解时,3个滑块位置确定,此时机器人的运动学模型类似于Gough-Stewart机器人。根据相关研究可知,理论上动平台的位姿最多可以有40个正解[18 -20 ] 。因此,在初始安装动平台时,动坐标系{ O D } { O 0 } 图2 (a)所示),也可以不全一致(如图2 (b)所示)。在这2种情况下机器人的运动性能不同。
图2
图2
动平台不同安装姿态
Fig.2
Different installation poses of moving platform
求解动平台逆解q
S ˙ A 1 = S ˙ A 3 S ˙ B 1 = S ˙ B 3 S ˙ C 1 = S ˙ C 3 (12)
在动平台运动过程中,其转动速度不全为0时动平台会产生转动。利用式(8)至式(12)进行计算,求得在ψ = θ = ϕ = 0
ψ ˙ = θ ˙ = ϕ ˙ = 0
因此,当动平台的初始安装位置为{ O D } { O 0 }
3.2 基于螺旋理论的自由度分析
可利用旋量法进一步分析动平台的运动自由度。当动平台初始安装位置为{ O D } { O 0 } ψ = θ = ϕ = 0
f x D 0 , q 0 = 0 3 × 1
q 0 = S 1 S 2 S 3 T
x D 0 = x D 0 y D 0 z D 0 T
x D 0 = S 1 2 + S 2 2 - 2 N - S 3 2 + 2 M - E 2 - L 1 2 - L 2 2 + 2 L 3 2 2 S 1 + S 2 + 4 N - S 3 y D 0 = L 1 2 - L 2 2 - S 1 2 + S 2 2 - 2 x D 0 S 2 - S 1 4 M - E z D 0 = ± L 3 2 - y D 0 2 - x D 0 + N - S 3 2
S 1 = ± L 1 2 - z D 0 2 - y D 0 + M - E 2 + x D 0 S 2 = ± L 2 2 - z D 0 2 - y D 0 - M + E 2 + x D 0 S 3 = ± L 3 2 - z D 0 2 - y D 0 2 + x D 0 + N (13)
由式(13)可知机器人的运动与结构参数T α α
设坐标系{ O 0 } s x s y s z
s x A = s x = 1 0 0 T s y A = s y = 0 1 0 T s z A = s z = 0 0 1 T
ξ ^ S 1 A = 0 3 × 1 s x A
运动链上每个球铰用3个相互垂直相交的转动副等效替代,因此运动链A上4个球铰的单位运动螺旋为:
ξ ^ A i x A = s x A O A i × s x A ξ ^ A i y A = s y A O A i × s y A ξ ^ A i z A = s z A O A i × s z A i = 1 , 2 , 3 , 4
O A 1 = S 1 - T c α E - T s α 0 O A 2 = x D 0 - T c α y D 0 - T s α + M z D 0
O A 3 = S 1 + T c α E + T s α 0 O A 4 = x D 0 + T c α y D 0 + T s α + M z D 0
由于运动链A的P(2-SS)机构属于串并联型,因此先求2-SS机构的约束螺旋。将支链A 1 A 2 中的全部运动单位螺旋组成其运动空间螺旋组,即:
S A 12 A = ξ ^ A 1 x A ξ ^ A 1 y A ξ ^ A 1 z A ξ ^ A 2 x A ξ ^ A 2 y A ξ ^ A 2 z A
Δ = 0 3 × 3 E 3 × 3 E 3 × 3 0 3 × 3
Δ S A 12 A T x = 0 6 × 1 (14)
ζ A 12 A = ζ A 121 A ζ A 122 A ⋯ ζ A 12 j A
ζ A 12 A A 1 A 2 中j 个反螺旋即支链A 1 A 2 的约束螺旋组。同理可求得支链A 3 A 4 的约束螺旋组ζ A 34 A
ζ A 1234 A = ζ A 12 A ζ A 34 A
Δ ζ A 1234 A T x = 0 6 × 1 (15)
求解方程组(15),得到其所有线性无关解S Α 1234 A
构造运动链A中P(2-SS)机构整体的运动空间螺旋组,即:
S A = ξ ^ S 1 A S A 1234 A
同理,求出其他2个并联支链B与C的约束螺旋ζ B ζ C
C p b = ζ A ζ B ζ C
C p b = 0 0 0 0 0 1 0 0 0 0 1 0 0 0 0 1 0 0 T
r p b = d i m C p b = 3
综上,可得动平台仅具有沿着3个轴方向运动的移动自由度。下文默认{ O D } { O 0 } 式(13)亦适用于动平台运动过程中,求解可得:
S ˙ 1 S ˙ 2 S ˙ 3 = 1 y D + M - E x D - S 1 z D x D - S 1 1 y D - M + E x D - S 2 z D x D - S 2 1 y D x D + N - S 3 z D x D + N - S 3 x ˙ D y ˙ D z ˙ D
q ˙ 0 = J 0 x ˙ 0
J 0 = 1 y D + M - E x D - S 1 z D x D - S 1 1 y D - M + E x D - S 2 z D x D - S 2 1 y D x D + N - S 3 z D x D + N - S 3
4 驱动副共面平行3-P(2-SS) 机器人灵巧性分析
灵巧性是指机械系统在任意方向轻松移动和施加力和扭矩的能力。雅可比矩阵条件数可用作机器人灵巧性的性能指标函数,即:
c o n d J 0 = J 0 · J 0 - 1
对于并联机器人,可用雅可比矩阵条件数表征机器人远离奇异点的程度。当条件数无穷大时,机器人处于奇异位形,此时机器人末端执行器的自由度减小,其处于失控状态。条件数越小,雅可比矩阵越接近于正交矩阵,机器人距离奇异点越远,在各个方向的运动能力越均匀,则操作性能越好。
利用式(13)求解运动学逆解,可得到机器人的运动范围。由于动平台沿X 0 向的移动范围随3个移动副运动范围的变化而变化,且条件数不随动平台沿X 0 向的移动变而化,因此不予探讨。
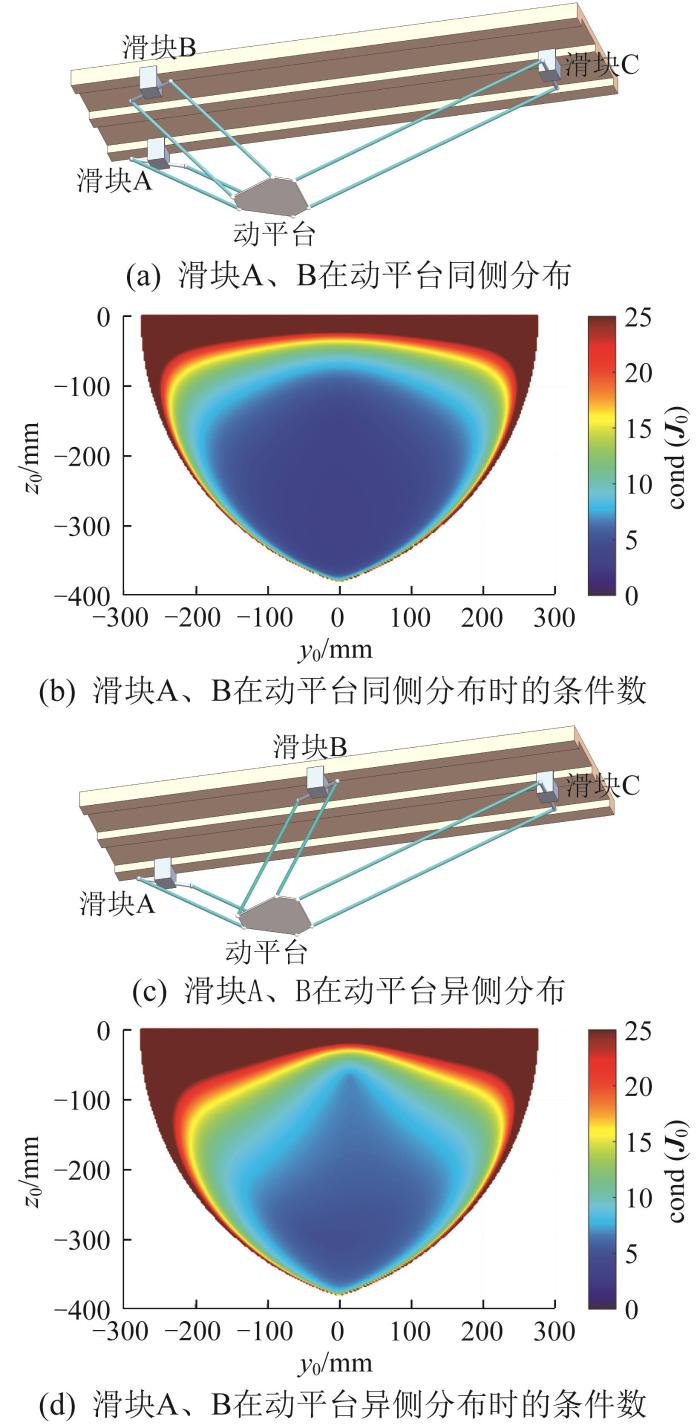
可计算得到动平台在Y 0 向和Z 0 向的条件数分布。由于机器人的运动学逆解有多个,当取不同逆解时,机器人的条件数不同。取不同运动学逆解时雅可比矩阵条件数如图3 所示。
图3
图3
取不同运动学逆解时雅可比矩阵条件数
Fig.3
Condition number of Jacobi matrix with different kinematic inverse solutions
如图3 (a)所示,滑块A、B位于动平台X 0 向一侧,滑块C位于另一侧时,由图3 (b)可知:条件数呈Y 0 向对称分布,且接近y 0 = 0 Z 0 向远离0时,条件数减小。通过计算J 0 z 0 = 0 J 0 = 0
如图3 (c)所示,滑块A位于动平台X 0 向一侧,滑块B、C位于另一侧时,由图3 (d)可知:条件数呈Y 0 向不对称分布;相比图3 (b),条件数总体变大,可控性变差,最佳运动范围变小。
5 驱动副共面平行3-P(2-SS) 机器人动力学分析
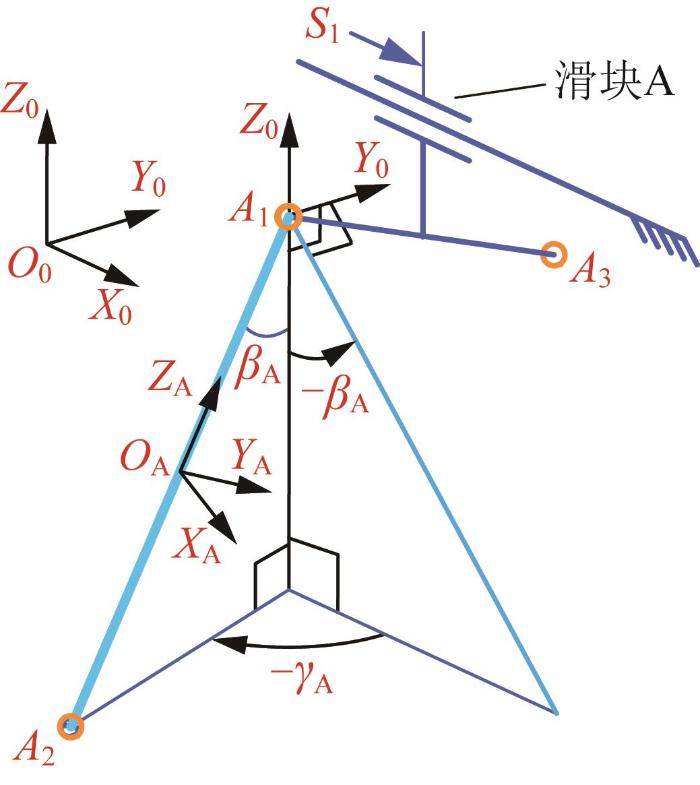
可以用拉格朗日方程求解机器人动力学问题。由机器人结构可知,每条运动链上一对连杆的动力学参数及运动状态一致,设置机器人动力学参数如表2 所示。连杆的转动角速度和惯性张量都相对于其自身动坐标系,以保证连杆运动时惯性张量始终为定值。如连杆A 1 A 2 图4 所示。为简化计算,忽略了关节摩擦力的影响[17 ] 。
图4
图4
连杆A 1 A 2 { O A }
Fig.4
Coordinate system { O A } A 1 A 2
L = K - P
机器人的总势能P
P = P D + 2 P l 1 + 2 P l 2 + 2 P l 3
P D = m D g z D P l 1 = m l 1 g z D / 2 P l 2 = m l 2 g z D / 2 P l 3 = m l 3 g z D / 2
机器人的总动能K
K = K D + K S 1 + K S 2 + K S 3 + 2 K l 1 + 2 K l 2 + 2 K l 3
K D = m D z ˙ D 2 / 2
K S 1 = m S 1 S ˙ 1 2 / 2
K S 2 = m S 2 S ˙ 2 2 / 2
K S 3 = m S 3 S ˙ 3 2 / 2
K l 1 = m l 1 v l 1 2 / 2 + A ω l 1 T I A I l 1 ω A ω l 1 / 2
K l 2 = m l 2 v l 2 2 / 2 + B ω l 2 T I B I l 2 ω B ω l 2 / 2
K l 3 = m l 3 v l 3 2 / 2 + C ω l 3 T I C I l 3 ω C ω l 3 / 2
v l 1 = S ˙ 1 + x ˙ D / 2 y ˙ D / 2 z ˙ D / 2 T
v l 2 = S ˙ 2 + x ˙ D / 2 y ˙ D / 2 z ˙ D / 2 T
v l 3 = S ˙ 3 + x ˙ D / 2 y ˙ D / 2 z ˙ D / 2 T
以连杆A 1 A 2 0 l 1 A 1 A 2 { O 0 }
O 0 O D = O 0 A 1 + A 1 A 2 + A 2 O D
A 1 A 2 = x D - S 1 y D + M - E z D T
x ˙ D y ˙ D z ˙ D T = S ˙ 1 0 0 T + ω 0 l 1 × A 1 A 2
由于连杆A 1 A 2 A 1 A 2 式(16)中0 l 1 0 l 1 A 1 A 2 0 l 1
0 l 1 = A 1 A 2 × x ˙ D - S ˙ 1 y ˙ D z ˙ D T L 1 2
滑块位置对机器人动力学方程有显著影响,根据前文灵巧性分析结果,本文主要求解滑块处于图3 (a)所示分布位置时机器人的动力学方程。可将A 1 处的球铰用2个分别绕Y 0 向和Z 0 向转动的转动副进行替代,设定O A A 1 A 2 O A A 1 A 2 Z A A 2 A 1 Y A X 0 O 0 Y 0 平面,如图4 所示。坐标系O A O 0 Y 0 轴逆转- β A Z 0 轴逆转- γ A
c o s - β A = - z D L 1 s i n γ A = y D + M - E - L 1 s i n β A
A l 1 = R o t y , - β A R o t z , - γ A ω 0 l 1 = c β A 0 - s β A 0 1 0 s β A 0 c β A c γ A s γ A 0 - s γ A c γ A 0 0 0 1 0 ω l 1 x 0 ω l 1 y 0 ω l 1 z
由式(17)至(19)可解得A l 1 { O B } { O C } B l 2 C l 3
根据拉格朗日算子方程计算,得到3个移动副的驱动力为:
F S 1 = d d t ∂ L ∂ S ˙ 1 - ∂ L ∂ S 1 = S ˙ 1 ∂ ∂ S 1 ∂ L ∂ S ˙ 1 + S ¨ 1 ∂ ∂ S ˙ 1 ∂ L ∂ S ˙ 1 + S ˙ 2 ∂ ∂ S 2 ∂ L ∂ S ˙ 1 + S ¨ 2 ∂ ∂ S ˙ 2 ∂ L ∂ S ˙ 1 + S ˙ 3 ∂ ∂ S 3 ∂ L ∂ S ˙ 1 + S ¨ 3 ∂ ∂ S ˙ 3 ∂ L ∂ S ˙ 1 - ∂ L ∂ S 1
F S 2 = d d t ∂ L ∂ S ˙ 2 - ∂ L ∂ S 2 = S ˙ 1 ∂ ∂ S 1 ∂ L ∂ S ˙ 2 + S ¨ 1 ∂ ∂ S ˙ 1 ∂ L ∂ S ˙ 2 + S ˙ 2 ∂ ∂ S 2 ∂ L ∂ S ˙ 2 + S ¨ 2 ∂ ∂ S ˙ 2 ∂ L ∂ S ˙ 2 + S ˙ 3 ∂ ∂ S 3 ∂ L ∂ S ˙ 2 + S ¨ 3 ∂ ∂ S ˙ 3 ∂ L ∂ S ˙ 2 - ∂ L ∂ S 2
F S 3 = d d t ∂ L ∂ S ˙ 3 - ∂ L ∂ S 3 = S ˙ 1 ∂ ∂ S 1 ∂ L ∂ S ˙ 3 + S ¨ 1 ∂ ∂ S ˙ 1 ∂ L ∂ S ˙ 3 + S ˙ 2 ∂ ∂ S 2 ∂ L ∂ S ˙ 3 + S ¨ 2 ∂ ∂ S ˙ 2 ∂ L ∂ S ˙ 3 + S ˙ 3 ∂ ∂ S 3 ∂ L ∂ S ˙ 3 + S ¨ 3 ∂ ∂ S ˙ 3 ∂ L ∂ S ˙ 3 - ∂ L ∂ S 3
6 驱动副共面平行3-P(2-SS) 机器人运动仿真验证
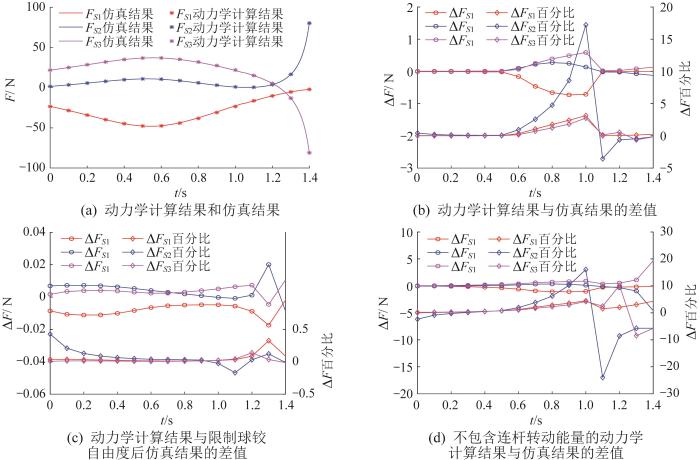
在NX软件中构建机器人三维模型,并利用其运动仿真模块的NX_motion求解器求解,得到机器人运动时各移动副的驱动力。将仿真结果与动力学计算结果进行对比,如图5 所示。
图5
图5
驱动副共面平行3-P(2-SS) 机器人移动副驱动力动力学计算结果与仿真结果的对比
Fig.5
Comparison of dynamics calculation results with simulation results of mobile auxiliary drive force of 3-P(2-SS) robot with coplanar parallel driving pairs
由图5 (a)可知,移动副驱动力仿真结果与动力学计算结果具有良好的一致性。
由图5 (b)可知,移动副驱动力仿真结果与动力学计算结果的差值ΔF 在1 N之内,当驱动力较小时,ΔF 百分比较大。产生偏差的原因主要是动力学计算时连杆的角速度矢量是按照垂直于连杆轴线的最小量计算的,而在实际系统中连杆具有绕自身轴线的局部自由度,其运动仿真过程中的转速与动力学计算时有一定偏差。
若在运动仿真过程中限制球铰的1个自由度,则运动仿真结果与动力学计算结果的最大偏差可减小到0.02 N及0.5%之内,如图5 (c)所示,由此验证了动力学方程建模的可靠性。
工程上构建类似结构的动力学方程时常采用简化方程,忽略了连杆的转动能量。不包含6条连杆转动能量的情况下动力学计算结果与仿真结果的差值如图5 (d)所示,两者的最大差值接近5 N,远大于图5 (b)所示,因此动力学计算时忽略连杆转动能量会造成较大的误差。相比直接忽略连杆转动能量的方法,采用本文提出的连杆转动近似替代法可有效提升动力学计算的准确度。
综合来说,采用本文提出的动力学方法可以满足机器人机构设计、选型及动力学分析的需求,在进行精确力控制时需要引入运动阻尼等变量进行修正。
7 结 论
1)针对由3个平行且共面的移动副驱动的3-P(2-SS)型并联机器人,建立了其运动学方程和雅可比矩阵,分析了其运动学方程的多解性。
2)通过运动学方程并结合螺旋理论分析了机器人的自由度,证实了在非奇异位形下,当动坐标系各轴方向与静坐标系一致时,该并联机器人仅具备3个平移自由度,转动自由度被完全约束,简化了机器人的运动学方程和雅可比矩阵。
3)利用雅可比矩阵条件数分析了机器人的灵巧性,分析了滑块分布模式对机器人灵巧性的影响。当2侧滑块位于动平台同侧时,机器人的灵巧性较好;机器人远离奇异点和运动范围边界附近时,其灵巧性较好。
4)基于拉格朗日方程构建了机器人动力学模型,利用最小角速度假设解决了连杆的局部自由度带来的动力学不确定问题,通过动坐标系变换解决了连杆惯性张量相对静坐标系的不恒定问题,得到了机器人的动力学方程。通过动力学计算结果与仿真结果的对比,验证了动力学建模的正确性,最小角速度假设导致的驱动力计算结果误差在可控范围内。
综上,驱动副共面平行的3-P(2-SS)并联机器人具有良好的操作性,本文提出的动力学建模方法为该型机器人力控制系统的构建提供了理论基础。
本文链接: https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2025.05.177
参考文献
View Option
[1]
田波 , 娄军强 , 沈家旭 , 等 可用于微创手术的毫米级微小并联机器人的设计、制造及实现
[J]. 机械工程学报 , 2024 , 60 (17 ): 147 -155 .
[本文引用: 1]
TIAN B LOU J Q SHEN J X et al Design, fabrication and realization of a parallel microrobot at the millimeter scale for minimally invasive surgery
[J]. Journal of Mechanical Engineering , 2024 , 60 (17 ): 147 -155 .
[本文引用: 1]
[2]
李清 , 刘荣帅 , 丰玉玺 , 等 新型并联机器人的构型设计与运动学分析
[J]. 包装工程 , 2020 , 41 (9 ): 167 -173 .
[本文引用: 1]
LI Q LIU R S FENG Y X et al Configuration design and kinematics analysis of a new parallel robot
[J]. Packaging Engineering , 2020 , 41 (9 ): 167 -173 .
[本文引用: 1]
[3]
吕志忠 , 张成维 , 钟功祥 , 等 一种四足磁吸附爬壁机器人运动学分析及仿真
[J]. 工程科学与技术 , 2020 , 52 (2 ): 121 -129 .
[本文引用: 2]
LYU Z Z ZHANG C W ZHONG G X et al Kinematics analysis and simulation of a quadruped magnetic adsorption wall-climbing robot
[J]. Advanced Engineering Sciences , 2020 , 52 (2 ): 121 -129 .
[本文引用: 2]
[4]
梁栋 , 梁正宇 , 畅博彦 , 等 多臂机提综臂辅助旋铆并联机器人优化设计
[J]. 工程设计学报 , 2022 , 29 (1 ): 28 -40 .
[本文引用: 1]
LIANG D LIANG Z Y CHANG B Y et al Optimal design of assisting-riveting parallel robot for lifting arm of dobby loom
[J]. Chinese Journal of Engineering Design , 2022 , 29 (1 ): 28 -40 .
[本文引用: 1]
[5]
刘荣帅 , 李清 , 杜昱东 , 等 3-CUR并联分拣机器人的运动学分析与仿真
[J]. 包装工程 , 2019 , 40 (21 ): 179 -186 .
LIU R S LI Q DU Y D et al Kinematics analysis and simulation of 3-CUR parallel sorting robot
[J]. Packaging Engineering , 2019 , 40 (21 ): 179 -186 .
[6]
王学军 , 张帆 攀爬机器人动力学建模与分析
[J]. 机械科学与技术 , 2023 , 42 (1 ): 38 -45 .
[本文引用: 1]
WANG X J ZHANG F Dynamic modeling and analysis of climbing robot
[J]. Mechanical Science and Technology for Aerospace Engineering , 2023 , 42 (1 ): 38 -45 .
[本文引用: 1]
[7]
王耀军 , 金翔 基于运动/力传递性能的索并联机器人尺度综合研究
[J]. 机电工程 , 2024 , 41 (11 ): 2029 -2040 , 2118 .
[本文引用: 2]
WANG Y J JIN X Dimensional synthesis of cable-driven parallel robots based on the motion/force transmission performance
[J]. Journal of Mechanical & Electrical Engineering , 2024 , 41 (11 ): 2029 -2040 , 2118 .
[本文引用: 2]
[8]
潘英 , 方跃法 , 汪丛哲 五自由度3D打印并联机器人设计及分析
[J]. 中国机械工程 , 2016 , 27 (17 ): 2273 -2279 .
[本文引用: 1]
PAN Y FANG Y F WANG C Z Design and analysis of five DOF 3D printing parallel robot
[J]. China Mechanical Engineering , 2016 , 27 (17 ): 2273 -2279 .
[本文引用: 1]
[9]
ZHANG L LI R Q NING F P et al Performance analysis and optimization design of a dual-mode reconfigurable ankle joint parallel rehabilitation mechanism
[J]. Applied Sciences , 2024 , 14 (5 ): 1757 .
[本文引用: 1]
[10]
HAN M CHE J J LIU J Y et al Performance evaluation and dimensional optimization design of planar 6R redundant actuation parallel mechanism
[J]. Robotica , 2024 , 42 (5 ): 1649 -1675 .
[11]
HUSSAIN S JAMWAL P K VAN VLIET P Design synthesis and optimization of a 4-SPS intrinsically compliant parallel wrist rehabilitation robotic orthosis
[J]. Journal of Computational Design and Engineering , 2021 , 8 (6 ): 1562 -1575 .
[本文引用: 1]
[12]
ZOFFOLI F IDA’ E CARRICATO M Design and control optimization for hybrid-controlled overconstrained cable-driven parallel robots
[J]. Mechanism and Machine Theory , 2025 , 209 : 105998 .
[本文引用: 1]
[13]
SHAH M F JAMWAL P K GOECKE R et al A parallel mechanism-based virtual biomechanical shoulder robot model: Mechanism design optimization and motion planning
[J]. Mechanics Based Design of Structures and Machines , 2025 , 53 (4 ): 2744 -2764 .
[本文引用: 1]
[14]
梁栋 , 李世友 , 畅博彦 , 等 冗余驱动精密定位并联机器人动力学优化
[J]. 机械设计与研究 , 2022 , 38 (5 ): 79 -87 .
[本文引用: 1]
LIANG D LI S Y CHANG B Y et al Dynamic optimization for precision positioning parallel manipulator with redundant actuation
[J]. Machine Design & Research , 2022 , 38 (5 ): 79 -87 .
[本文引用: 1]
[15]
王敏 , 孙景健 , 丁基恒 , 等 基于D-H参数与拉格朗日联立方程的仿生水蛇机器人运动学分析及动力学建模
[J]. 机械工程学报 , 2024 , 60 (15 ): 134 -148 .
[本文引用: 1]
WANG M SUN J J DING J H et al Kinematics analysis and dynamics modeling of bionic water snake robot based on D-H parameters and Lagrange equations
[J]. Journal of Mechanical Engineering , 2024 , 60 (15 ): 134 -148 .
[本文引用: 1]
[16]
刘凉 , 汪博深 , 冯建峰 , 等 含柔性动平台并联机器人动力学建模方法研究
[J]. 农业机械学报 , 2023 , 54 (12 ): 417 -430 .
[本文引用: 1]
LIU L WANG B S FENG J F et al Dynamic modeling method of parallel robot with flexible moving platform
[J]. Transactions of the Chinese Society for Agricultural Machinery , 2023 , 54 (12 ): 417 -430 .
[本文引用: 1]
[17]
翟国栋 , 刘龙宇 , 蔡晨光 , 等 直线电机驱动六自由度并联机构动力学特性研究
[J]. 农业机械学报 , 2022 , 53 (11 ): 450 -458 .
[本文引用: 2]
ZHAI G D LIU L Y CAI C G et al Dynamic characteristics of 6-DOF parallel mechanism driven by linear motor
[J]. Transactions of the Chinese Society for Agricultural Machinery , 2022 , 53 (11 ): 450 -458 .
[本文引用: 2]
[18]
王福荣 , 辛焦丽 一种求解一般Stewart台体型机构位置正解的算法
[J]. 机械传动 , 2016 , 40 (7 ): 113 -116 .
[本文引用: 1]
WANG F R XIN J L An algorithm for the forward position kinematics of general Stewart platform mechanism
[J]. Journal of Mechanical Transmission , 2016 , 40 (7 ): 113 -116 .
[本文引用: 1]
[19]
程世利 , 吴洪涛 , 王超群 , 等 一般6-SPS并联机构运动学正解的解析化方法
[J]. 中国机械工程 , 2010 , 21 (11 ): 1261 -1264 .
CHENG S L WU H T WANG C Q et al Analytical method for forward kinematics analysis of general 6-SPS parallel mechanisms
[J]. China Mechanical Engineering , 2010 , 21 (11 ): 1261 -1264 .
[20]
[本文引用: 1]
HUANG X G LIAO Q Z WEI S M et al Forward kinematics analysis of the general 6-6 platform parallel mechanism based on algebraic elimination
[J]. Chinese Journal of Mechanical Engineering , 2009 , 45 (1 ): 56 -61 .
DOI:10.3901/jme.2009.01.056
[本文引用: 1]
可用于微创手术的毫米级微小并联机器人的设计、制造及实现
1
2024
... 并联机器人在机构刚度、运动精度、负载能力、力矩分布、稳定性和速度等方面具有显著优势[1 ] .3-P(2-SS)机构由3个并联的移动副(P)驱动,每个移动副与动平台之间通过2条并联的运动链连接,每条运动链由2个球铰(S)及其之间的连杆构成.该机构常用于3D打印机、Delta机器人等.国内外学者对3-P(2-SS)机器人的研究多集中于其传统构形,即机构的3个移动副竖直均布于动平台工作空间的外侧,动平台横向工作空间有限.本文以驱动副共面平行的3-P(2-SS)型并联机器人为研究对象,分析其运动特性及动力学性能.该机器人由于3个移动副共面且位于动平台上部,动平台沿移动副方向的运动范围可随着移动副滑轨的伸长而增大,因此其更适合在狭长区域进行物品分拣、包装、搬运等工作. ...
可用于微创手术的毫米级微小并联机器人的设计、制造及实现
1
2024
... 并联机器人在机构刚度、运动精度、负载能力、力矩分布、稳定性和速度等方面具有显著优势[1 ] .3-P(2-SS)机构由3个并联的移动副(P)驱动,每个移动副与动平台之间通过2条并联的运动链连接,每条运动链由2个球铰(S)及其之间的连杆构成.该机构常用于3D打印机、Delta机器人等.国内外学者对3-P(2-SS)机器人的研究多集中于其传统构形,即机构的3个移动副竖直均布于动平台工作空间的外侧,动平台横向工作空间有限.本文以驱动副共面平行的3-P(2-SS)型并联机器人为研究对象,分析其运动特性及动力学性能.该机器人由于3个移动副共面且位于动平台上部,动平台沿移动副方向的运动范围可随着移动副滑轨的伸长而增大,因此其更适合在狭长区域进行物品分拣、包装、搬运等工作. ...
新型并联机器人的构型设计与运动学分析
1
2020
... 国内外学者对机器人进行自由度分析时,对于简单机构,常采用Grubler-Kutzbach公式进行计算[2 -3 ] ;对于复杂的多支链或过约束机构,常采用李群与李代数及螺旋理论进行分析[4 -7 ] ;对于特定形位的自由度,常采用雅可比矩阵法分析其奇异性[3 ,8 ] .本文利用机器人运动学方程和螺旋理论,对机器人的自由度进行分析,以简化其运动学方程与雅可比矩阵. ...
新型并联机器人的构型设计与运动学分析
1
2020
... 国内外学者对机器人进行自由度分析时,对于简单机构,常采用Grubler-Kutzbach公式进行计算[2 -3 ] ;对于复杂的多支链或过约束机构,常采用李群与李代数及螺旋理论进行分析[4 -7 ] ;对于特定形位的自由度,常采用雅可比矩阵法分析其奇异性[3 ,8 ] .本文利用机器人运动学方程和螺旋理论,对机器人的自由度进行分析,以简化其运动学方程与雅可比矩阵. ...
一种四足磁吸附爬壁机器人运动学分析及仿真
2
2020
... 国内外学者对机器人进行自由度分析时,对于简单机构,常采用Grubler-Kutzbach公式进行计算[2 -3 ] ;对于复杂的多支链或过约束机构,常采用李群与李代数及螺旋理论进行分析[4 -7 ] ;对于特定形位的自由度,常采用雅可比矩阵法分析其奇异性[3 ,8 ] .本文利用机器人运动学方程和螺旋理论,对机器人的自由度进行分析,以简化其运动学方程与雅可比矩阵. ...
... [3 ,8 ].本文利用机器人运动学方程和螺旋理论,对机器人的自由度进行分析,以简化其运动学方程与雅可比矩阵. ...
一种四足磁吸附爬壁机器人运动学分析及仿真
2
2020
... 国内外学者对机器人进行自由度分析时,对于简单机构,常采用Grubler-Kutzbach公式进行计算[2 -3 ] ;对于复杂的多支链或过约束机构,常采用李群与李代数及螺旋理论进行分析[4 -7 ] ;对于特定形位的自由度,常采用雅可比矩阵法分析其奇异性[3 ,8 ] .本文利用机器人运动学方程和螺旋理论,对机器人的自由度进行分析,以简化其运动学方程与雅可比矩阵. ...
... [3 ,8 ].本文利用机器人运动学方程和螺旋理论,对机器人的自由度进行分析,以简化其运动学方程与雅可比矩阵. ...
多臂机提综臂辅助旋铆并联机器人优化设计
1
2022
... 国内外学者对机器人进行自由度分析时,对于简单机构,常采用Grubler-Kutzbach公式进行计算[2 -3 ] ;对于复杂的多支链或过约束机构,常采用李群与李代数及螺旋理论进行分析[4 -7 ] ;对于特定形位的自由度,常采用雅可比矩阵法分析其奇异性[3 ,8 ] .本文利用机器人运动学方程和螺旋理论,对机器人的自由度进行分析,以简化其运动学方程与雅可比矩阵. ...
多臂机提综臂辅助旋铆并联机器人优化设计
1
2022
... 国内外学者对机器人进行自由度分析时,对于简单机构,常采用Grubler-Kutzbach公式进行计算[2 -3 ] ;对于复杂的多支链或过约束机构,常采用李群与李代数及螺旋理论进行分析[4 -7 ] ;对于特定形位的自由度,常采用雅可比矩阵法分析其奇异性[3 ,8 ] .本文利用机器人运动学方程和螺旋理论,对机器人的自由度进行分析,以简化其运动学方程与雅可比矩阵. ...
3-CUR并联分拣机器人的运动学分析与仿真
0
2019
3-CUR并联分拣机器人的运动学分析与仿真
0
2019
攀爬机器人动力学建模与分析
1
2023
... 针对并联机器人的动力学研究,主要集中在高效高精度动力学建模[6 ,15 ] 、刚柔耦合动力学分析[16 ] 、高精度控制驱动系统分析[17 ] 等方面,而对于机器人机构中局部自由度的处理鲜有讨论.本文针对2-SS双球铰运动链中局部自由度导致的运动不确定性问题,利用最小角速度假设,采用机构近似替代法,求解机器人动力学方程,并进行运动仿真验证. ...
攀爬机器人动力学建模与分析
1
2023
... 针对并联机器人的动力学研究,主要集中在高效高精度动力学建模[6 ,15 ] 、刚柔耦合动力学分析[16 ] 、高精度控制驱动系统分析[17 ] 等方面,而对于机器人机构中局部自由度的处理鲜有讨论.本文针对2-SS双球铰运动链中局部自由度导致的运动不确定性问题,利用最小角速度假设,采用机构近似替代法,求解机器人动力学方程,并进行运动仿真验证. ...
基于运动/力传递性能的索并联机器人尺度综合研究
2
2024
... 国内外学者对机器人进行自由度分析时,对于简单机构,常采用Grubler-Kutzbach公式进行计算[2 -3 ] ;对于复杂的多支链或过约束机构,常采用李群与李代数及螺旋理论进行分析[4 -7 ] ;对于特定形位的自由度,常采用雅可比矩阵法分析其奇异性[3 ,8 ] .本文利用机器人运动学方程和螺旋理论,对机器人的自由度进行分析,以简化其运动学方程与雅可比矩阵. ...
... 对机器人灵巧性进行分析时,学者们常采用可达工作空间、全姿态工作空间、灵活度等指标评价机器人的工作空间[9 -12 ] ,采用雅可比矩阵条件数、可操作度、最小奇异值等指标评价机器人的运动性能[11 ,13 -14 ] ,采用力传递效率等指标评价机器人的动力学性能[7 ] .本文采用分析并联机器人时常用的雅可比矩阵条件数指标,根据简化后的雅可比矩阵,通过机器人移动副取不同运动学逆解时的灵巧性分析,来确定机器人动平台最佳运动范围和移动副最佳运动学逆解位置. ...
基于运动/力传递性能的索并联机器人尺度综合研究
2
2024
... 国内外学者对机器人进行自由度分析时,对于简单机构,常采用Grubler-Kutzbach公式进行计算[2 -3 ] ;对于复杂的多支链或过约束机构,常采用李群与李代数及螺旋理论进行分析[4 -7 ] ;对于特定形位的自由度,常采用雅可比矩阵法分析其奇异性[3 ,8 ] .本文利用机器人运动学方程和螺旋理论,对机器人的自由度进行分析,以简化其运动学方程与雅可比矩阵. ...
... 对机器人灵巧性进行分析时,学者们常采用可达工作空间、全姿态工作空间、灵活度等指标评价机器人的工作空间[9 -12 ] ,采用雅可比矩阵条件数、可操作度、最小奇异值等指标评价机器人的运动性能[11 ,13 -14 ] ,采用力传递效率等指标评价机器人的动力学性能[7 ] .本文采用分析并联机器人时常用的雅可比矩阵条件数指标,根据简化后的雅可比矩阵,通过机器人移动副取不同运动学逆解时的灵巧性分析,来确定机器人动平台最佳运动范围和移动副最佳运动学逆解位置. ...
五自由度3D打印并联机器人设计及分析
1
2016
... 国内外学者对机器人进行自由度分析时,对于简单机构,常采用Grubler-Kutzbach公式进行计算[2 -3 ] ;对于复杂的多支链或过约束机构,常采用李群与李代数及螺旋理论进行分析[4 -7 ] ;对于特定形位的自由度,常采用雅可比矩阵法分析其奇异性[3 ,8 ] .本文利用机器人运动学方程和螺旋理论,对机器人的自由度进行分析,以简化其运动学方程与雅可比矩阵. ...
五自由度3D打印并联机器人设计及分析
1
2016
... 国内外学者对机器人进行自由度分析时,对于简单机构,常采用Grubler-Kutzbach公式进行计算[2 -3 ] ;对于复杂的多支链或过约束机构,常采用李群与李代数及螺旋理论进行分析[4 -7 ] ;对于特定形位的自由度,常采用雅可比矩阵法分析其奇异性[3 ,8 ] .本文利用机器人运动学方程和螺旋理论,对机器人的自由度进行分析,以简化其运动学方程与雅可比矩阵. ...
Performance analysis and optimization design of a dual-mode reconfigurable ankle joint parallel rehabilitation mechanism
1
2024
... 对机器人灵巧性进行分析时,学者们常采用可达工作空间、全姿态工作空间、灵活度等指标评价机器人的工作空间[9 -12 ] ,采用雅可比矩阵条件数、可操作度、最小奇异值等指标评价机器人的运动性能[11 ,13 -14 ] ,采用力传递效率等指标评价机器人的动力学性能[7 ] .本文采用分析并联机器人时常用的雅可比矩阵条件数指标,根据简化后的雅可比矩阵,通过机器人移动副取不同运动学逆解时的灵巧性分析,来确定机器人动平台最佳运动范围和移动副最佳运动学逆解位置. ...
Performance evaluation and dimensional optimization design of planar 6R redundant actuation parallel mechanism
0
2024
Design synthesis and optimization of a 4-SPS intrinsically compliant parallel wrist rehabilitation robotic orthosis
1
2021
... 对机器人灵巧性进行分析时,学者们常采用可达工作空间、全姿态工作空间、灵活度等指标评价机器人的工作空间[9 -12 ] ,采用雅可比矩阵条件数、可操作度、最小奇异值等指标评价机器人的运动性能[11 ,13 -14 ] ,采用力传递效率等指标评价机器人的动力学性能[7 ] .本文采用分析并联机器人时常用的雅可比矩阵条件数指标,根据简化后的雅可比矩阵,通过机器人移动副取不同运动学逆解时的灵巧性分析,来确定机器人动平台最佳运动范围和移动副最佳运动学逆解位置. ...
Design and control optimization for hybrid-controlled overconstrained cable-driven parallel robots
1
2025
... 对机器人灵巧性进行分析时,学者们常采用可达工作空间、全姿态工作空间、灵活度等指标评价机器人的工作空间[9 -12 ] ,采用雅可比矩阵条件数、可操作度、最小奇异值等指标评价机器人的运动性能[11 ,13 -14 ] ,采用力传递效率等指标评价机器人的动力学性能[7 ] .本文采用分析并联机器人时常用的雅可比矩阵条件数指标,根据简化后的雅可比矩阵,通过机器人移动副取不同运动学逆解时的灵巧性分析,来确定机器人动平台最佳运动范围和移动副最佳运动学逆解位置. ...
A parallel mechanism-based virtual biomechanical shoulder robot model: Mechanism design optimization and motion planning
1
2025
... 对机器人灵巧性进行分析时,学者们常采用可达工作空间、全姿态工作空间、灵活度等指标评价机器人的工作空间[9 -12 ] ,采用雅可比矩阵条件数、可操作度、最小奇异值等指标评价机器人的运动性能[11 ,13 -14 ] ,采用力传递效率等指标评价机器人的动力学性能[7 ] .本文采用分析并联机器人时常用的雅可比矩阵条件数指标,根据简化后的雅可比矩阵,通过机器人移动副取不同运动学逆解时的灵巧性分析,来确定机器人动平台最佳运动范围和移动副最佳运动学逆解位置. ...
冗余驱动精密定位并联机器人动力学优化
1
2022
... 对机器人灵巧性进行分析时,学者们常采用可达工作空间、全姿态工作空间、灵活度等指标评价机器人的工作空间[9 -12 ] ,采用雅可比矩阵条件数、可操作度、最小奇异值等指标评价机器人的运动性能[11 ,13 -14 ] ,采用力传递效率等指标评价机器人的动力学性能[7 ] .本文采用分析并联机器人时常用的雅可比矩阵条件数指标,根据简化后的雅可比矩阵,通过机器人移动副取不同运动学逆解时的灵巧性分析,来确定机器人动平台最佳运动范围和移动副最佳运动学逆解位置. ...
冗余驱动精密定位并联机器人动力学优化
1
2022
... 对机器人灵巧性进行分析时,学者们常采用可达工作空间、全姿态工作空间、灵活度等指标评价机器人的工作空间[9 -12 ] ,采用雅可比矩阵条件数、可操作度、最小奇异值等指标评价机器人的运动性能[11 ,13 -14 ] ,采用力传递效率等指标评价机器人的动力学性能[7 ] .本文采用分析并联机器人时常用的雅可比矩阵条件数指标,根据简化后的雅可比矩阵,通过机器人移动副取不同运动学逆解时的灵巧性分析,来确定机器人动平台最佳运动范围和移动副最佳运动学逆解位置. ...
基于D-H参数与拉格朗日联立方程的仿生水蛇机器人运动学分析及动力学建模
1
2024
... 针对并联机器人的动力学研究,主要集中在高效高精度动力学建模[6 ,15 ] 、刚柔耦合动力学分析[16 ] 、高精度控制驱动系统分析[17 ] 等方面,而对于机器人机构中局部自由度的处理鲜有讨论.本文针对2-SS双球铰运动链中局部自由度导致的运动不确定性问题,利用最小角速度假设,采用机构近似替代法,求解机器人动力学方程,并进行运动仿真验证. ...
基于D-H参数与拉格朗日联立方程的仿生水蛇机器人运动学分析及动力学建模
1
2024
... 针对并联机器人的动力学研究,主要集中在高效高精度动力学建模[6 ,15 ] 、刚柔耦合动力学分析[16 ] 、高精度控制驱动系统分析[17 ] 等方面,而对于机器人机构中局部自由度的处理鲜有讨论.本文针对2-SS双球铰运动链中局部自由度导致的运动不确定性问题,利用最小角速度假设,采用机构近似替代法,求解机器人动力学方程,并进行运动仿真验证. ...
含柔性动平台并联机器人动力学建模方法研究
1
2023
... 针对并联机器人的动力学研究,主要集中在高效高精度动力学建模[6 ,15 ] 、刚柔耦合动力学分析[16 ] 、高精度控制驱动系统分析[17 ] 等方面,而对于机器人机构中局部自由度的处理鲜有讨论.本文针对2-SS双球铰运动链中局部自由度导致的运动不确定性问题,利用最小角速度假设,采用机构近似替代法,求解机器人动力学方程,并进行运动仿真验证. ...
含柔性动平台并联机器人动力学建模方法研究
1
2023
... 针对并联机器人的动力学研究,主要集中在高效高精度动力学建模[6 ,15 ] 、刚柔耦合动力学分析[16 ] 、高精度控制驱动系统分析[17 ] 等方面,而对于机器人机构中局部自由度的处理鲜有讨论.本文针对2-SS双球铰运动链中局部自由度导致的运动不确定性问题,利用最小角速度假设,采用机构近似替代法,求解机器人动力学方程,并进行运动仿真验证. ...
直线电机驱动六自由度并联机构动力学特性研究
2
2022
... 针对并联机器人的动力学研究,主要集中在高效高精度动力学建模[6 ,15 ] 、刚柔耦合动力学分析[16 ] 、高精度控制驱动系统分析[17 ] 等方面,而对于机器人机构中局部自由度的处理鲜有讨论.本文针对2-SS双球铰运动链中局部自由度导致的运动不确定性问题,利用最小角速度假设,采用机构近似替代法,求解机器人动力学方程,并进行运动仿真验证. ...
... 可以用拉格朗日方程求解机器人动力学问题.由机器人结构可知,每条运动链上一对连杆的动力学参数及运动状态一致,设置机器人动力学参数如表2 所示.连杆的转动角速度和惯性张量都相对于其自身动坐标系,以保证连杆运动时惯性张量始终为定值.如连杆A 1 A 2 图4 所示.为简化计算,忽略了关节摩擦力的影响[17 ] . ...
直线电机驱动六自由度并联机构动力学特性研究
2
2022
... 针对并联机器人的动力学研究,主要集中在高效高精度动力学建模[6 ,15 ] 、刚柔耦合动力学分析[16 ] 、高精度控制驱动系统分析[17 ] 等方面,而对于机器人机构中局部自由度的处理鲜有讨论.本文针对2-SS双球铰运动链中局部自由度导致的运动不确定性问题,利用最小角速度假设,采用机构近似替代法,求解机器人动力学方程,并进行运动仿真验证. ...
... 可以用拉格朗日方程求解机器人动力学问题.由机器人结构可知,每条运动链上一对连杆的动力学参数及运动状态一致,设置机器人动力学参数如表2 所示.连杆的转动角速度和惯性张量都相对于其自身动坐标系,以保证连杆运动时惯性张量始终为定值.如连杆A 1 A 2 图4 所示.为简化计算,忽略了关节摩擦力的影响[17 ] . ...
一种求解一般Stewart台体型机构位置正解的算法
1
2016
... 求解机器人运动学正解时,3个滑块位置确定,此时机器人的运动学模型类似于Gough-Stewart机器人.根据相关研究可知,理论上动平台的位姿最多可以有40个正解[18 -20 ] .因此,在初始安装动平台时,动坐标系{ O D } { O 0 } 图2 (a)所示),也可以不全一致(如图2 (b)所示).在这2种情况下机器人的运动性能不同. ...
一种求解一般Stewart台体型机构位置正解的算法
1
2016
... 求解机器人运动学正解时,3个滑块位置确定,此时机器人的运动学模型类似于Gough-Stewart机器人.根据相关研究可知,理论上动平台的位姿最多可以有40个正解[18 -20 ] .因此,在初始安装动平台时,动坐标系{ O D } { O 0 } 图2 (a)所示),也可以不全一致(如图2 (b)所示).在这2种情况下机器人的运动性能不同. ...
一般6-SPS并联机构运动学正解的解析化方法
0
2010
一般6-SPS并联机构运动学正解的解析化方法
0
2010
一般6-6型平台并联机构位置正解代数消元法
1
2009
... 求解机器人运动学正解时,3个滑块位置确定,此时机器人的运动学模型类似于Gough-Stewart机器人.根据相关研究可知,理论上动平台的位姿最多可以有40个正解[18 -20 ] .因此,在初始安装动平台时,动坐标系{ O D } { O 0 } 图2 (a)所示),也可以不全一致(如图2 (b)所示).在这2种情况下机器人的运动性能不同. ...
一般6-6型平台并联机构位置正解代数消元法
1
2009
... 求解机器人运动学正解时,3个滑块位置确定,此时机器人的运动学模型类似于Gough-Stewart机器人.根据相关研究可知,理论上动平台的位姿最多可以有40个正解[18 -20 ] .因此,在初始安装动平台时,动坐标系{ O D } { O 0 } 图2 (a)所示),也可以不全一致(如图2 (b)所示).在这2种情况下机器人的运动性能不同. ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}