驱动副共面平行的3-P(2-SS)型并联机器人运动特性及动力学分析
Kinematic characteristics and dynamics analysis of 3-P(2-SS) robot with coplanar parallel driving pairs
驱动副共面平行的3-P(2-SS)型并联机器人运动特性及动力学分析 |
| 李瑾 |
|
Kinematic characteristics and dynamics analysis of 3-P(2-SS) robot with coplanar parallel driving pairs |
| Jin LI |
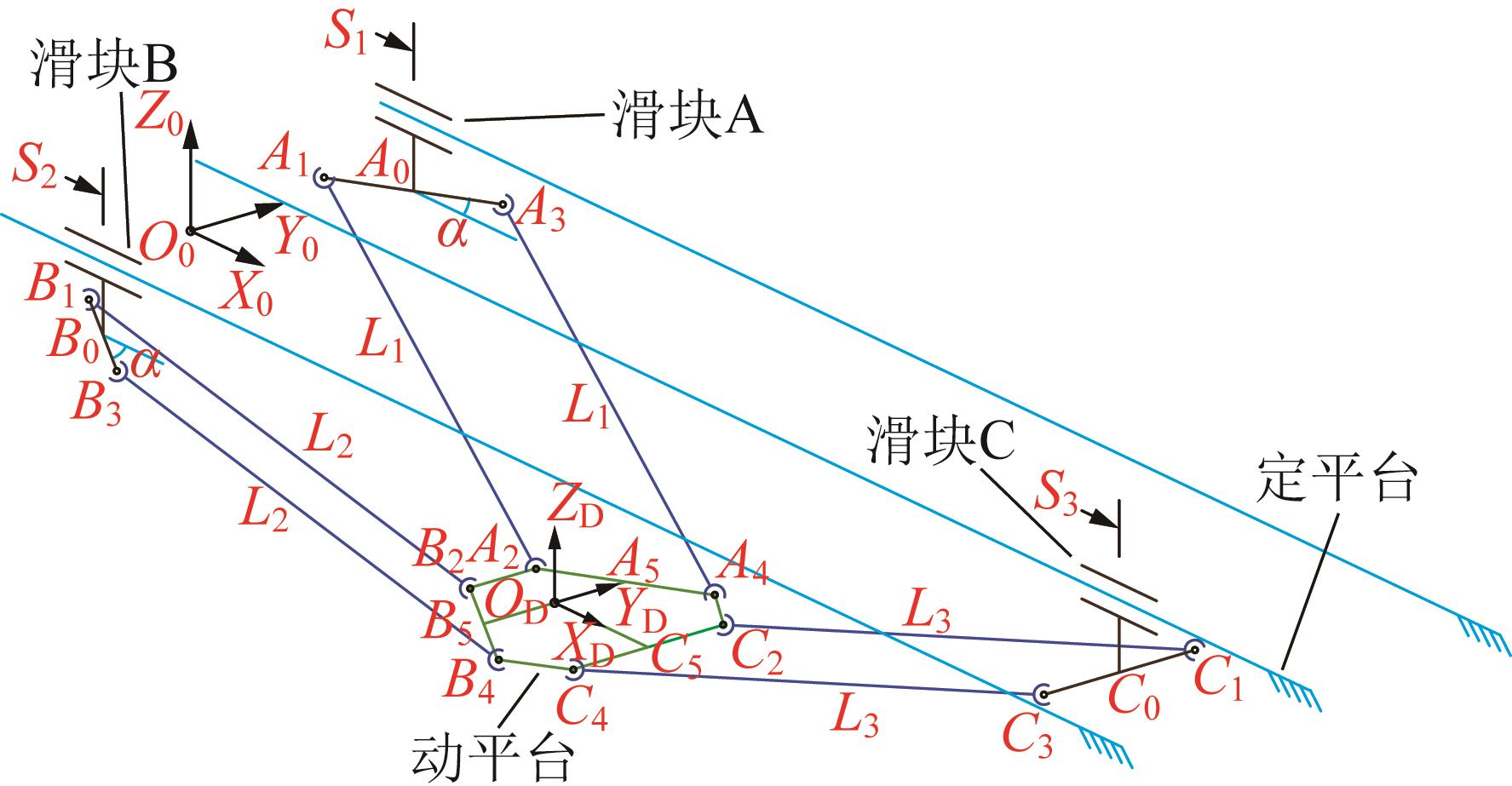
| 图1 驱动副共面平行3-P(2-SS)机器人运动机构简图 |
| Fig.1 Motion mechanism schematic of 3-P(2-SS) robot with coplanar parallel driving pairs |
|
|