


综上,现有软体爬壁机器人具有各种功能,如转弯、攀爬等,但将这些功能集成到单个机器人中仍具有一定的挑战性。解决这一问题的难点主要在于兼顾攀爬稳定性和结构简化。相较于单一运动功能,多种运动功能需要更多的驱动器和更显著的变形来实现,这增加了软体爬壁机器人从壁面上脱落的风险。因此,需要设计轻量化的结构和稳定的吸附方式来应对各种壁面环境以及多次运动所产生的剥离力。此外,不同的运动功能也需要设计不同的动作来实现。例如:转弯运动需要一个可改变前后锚定模块角度的动作来实现。
为此,本文基于Kresling折纸结构设计了一种仅由伸缩模块和锚定模块组成的结构简单的轻量级气动爬壁机器人。该机器人可执行多种运动功能,如双向爬行、竖直爬壁、灵活主动转弯以及攀爬不同坡度的倾斜壁面等。首先,对机器人的结构设计进行详细介绍,并分析其直线爬行运动和转弯运动的原理;然后,对伸缩模块的结构进行设计,并测试伸缩模块的性能及其对机器人爬行性能的影响;最后,对机器人的直线爬行、转弯、负重性能进行实验测试,以验证其结构设计的可行性。
1 基于Kresling折纸结构的气动爬壁机器人设计
1.1 机器人整体结构设计
尺蠖等蠕虫采用先前脚锚定、后脚松开,身体收缩,再后脚固定、前脚松开,身体伸展的循环运动方式,这种交替的步态使得尺蠖能够连续地向前移动。受蠕虫爬行运动的启发,设计仿尺蠖软体爬壁机器人。基于该运动原理设计的机器人可在壁面上稳定爬行。
图1
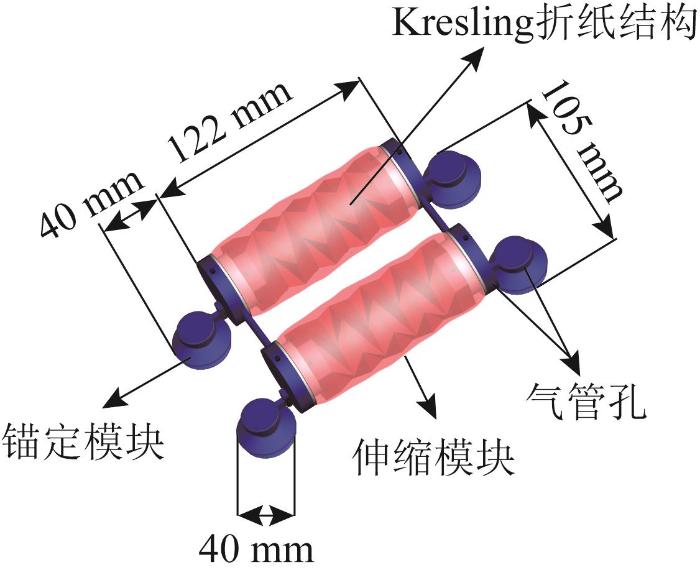
图1
基于Kresling折纸结构的气动爬壁机器人结构
Fig.1
Structure of pneumatic wall-climbing robot based on Kresling origami structure
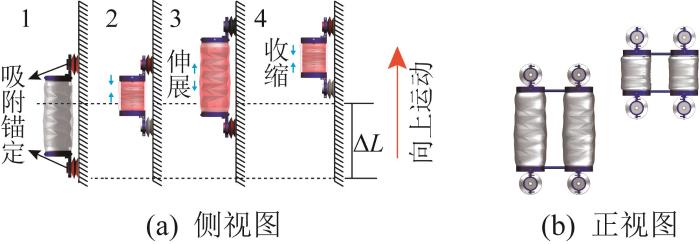
机器人的直线爬行运动原理如图2所示(以向上爬行为例),其通过锚定模块和伸缩模块的相互配合来实现稳定的周期性爬行。一个运动周期分为5个步态,初始状态下,机器人伸缩模块处于完全伸展状态,两端锚定模块同时锚定。步态1:头部锚定模块保持锚定,尾部锚定模块解除锚定。步态2:伸缩模块开始变形收缩并拉动尾部向上运动。步态3:伸缩模块完成收缩运动后,尾部锚定模块进行锚定。步态4:尾部锚定模块完成锚定,头部锚定模块解除锚定,伸缩模块开始变形伸展。步态5:伸缩模块完成伸展运动后,头部锚定模块再次进行锚定,尾部锚定模块解除锚定,进入步态1,形成循环。不断循环上述步态即可实现机器人在壁面上的连续向上直线爬行。
图2
1.2 机器人转弯原理分析
本文所设计的机器人采用双腔并排的方式,能够在竖直壁面上灵活转弯,其转弯原理为:基于伸缩模块可利用Kresling折纸结构的柔顺性实现360°弯曲且弯曲后可自行恢复原状的结构特点,控制一个伸缩模块收缩,另一个伸缩模块弯曲,使得机器人向伸缩量小的一侧偏移,实现转弯动作。
图3
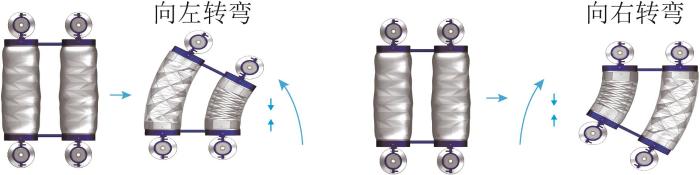
该机器人的转弯运动包含3个步态。步态1:头部的2个锚定模块保持锚定状态,左伸缩模块收缩,右伸缩模块因Kresling折纸结构的柔顺性而产生轻微的弯曲,使得左伸缩模块顺利收缩。步态2:左伸缩模块完成收缩后,尾部的2个锚定模块进行锚定,头部的2个锚定模块解除锚定。步态3:左伸缩模块开始伸展,在其伸展过程中,右伸缩模块从轻微的弯曲状态恢复为原状,在左伸缩模块完成伸展后,头部的2个锚定模块进行锚定。在这一过程中,左、右伸缩模块均会向上爬行,但因2个伸缩模块的伸缩量不同,且左伸缩模块的伸缩量大,机器人整体向右转弯。循环上述步态,机器人可实现持续的向右转弯爬行。同理,右伸缩模块收缩,左伸缩模块随之弯曲,即可实现向左转弯。
1.3 伸缩模块设计及性能分析
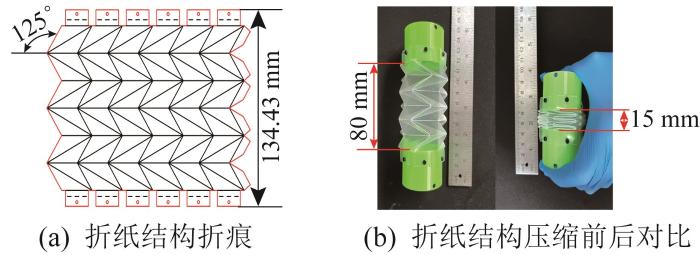
为了满足爬壁机器人的爬壁要求,设计了一种以Kresling折纸结构为骨架、塑料薄膜为封闭腔表皮的伸缩模块。虽Kresling折纸结构与管状折纸结构均具有回弹力,但前者具有一定的侧向刚度且不易弯曲,而后者只有固定的弯曲方向且易弯曲,故Kresling折纸结构可满足爬壁机器人爬行时的刚度要求。伸缩模块的结构及运动过程如图4所示。塑料薄膜包裹Kresling折纸结构,两端用3D打印的塑料筒和塑料外壳固定,塑料外壳上留有4 mm气管孔,用于连接机器人与气泵。Kresling折纸结构的折痕如图5(a)所示,其由厚度为0.2 mm的聚丙烯(polypropylene, PP)塑料板折成,折痕由激光机切割,其中边缘切断,折痕切出虚线;折纸结构为偶数层,两端留有2 mm的螺栓孔。相比于由植物纤维制成的折纸结构,采用塑料材质的折纸结构回弹力大,使用寿命长,质量小,可作为伸缩模块的储能装置。6层Kresling折纸结构压缩前后的对比如图5(b)所示,其压缩比高达5.3倍。机器人在单个运动周期内的爬行距离由伸缩模块的伸长量决定,折纸结构压缩比大有助于提高机器人的爬行速度。塑料薄膜采用聚乙烯(polyethylene, PE)材质,厚度为0.02 mm,宽度为90 mm,采用筒状结构,便于装配。塑料外壳及塑料套圈的材料为聚丙交酯(polylactic acid, PLA),其外径分别为54、44 mm;塑料筒的外径为44 mm,内径为41 mm。
图4
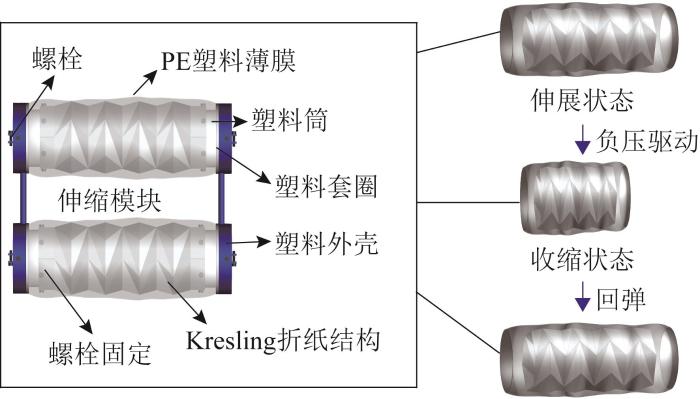
图4
伸缩模块结构及其运动示意
Fig.4
Schematic diagram of structure and movement of telescopic module
图5
爬壁机器人向上爬行时要克服自身重力和锚定模块与壁面之间的摩擦力。为了测量伸缩模块在不同负压下所能产生的拉伸力,搭建了测力实验平台,如图6(a)所示:将单腔伸缩模块(含6层Kresling折纸结构)固定在铝材架上,伸缩模块上端中心设有挂钩;将数显推拉力计固定在步进电机直线滑轨上,其最大可提供200 N的推力或拉力。将伸缩模块的驱动气压分别设定为-80、-50、-20 kPa,使其处于收缩状态,直线滑轨带动推拉力计拉动伸缩模块,推拉力计实时显示每一时刻下的拉伸力,测量数据如图6(b)所示。结果显示,伸缩模块所产生的最大拉伸力为65 N。本文所设计的爬壁机器人的质量为250.07 g,当头部锚定时,其向上爬行所需的拉伸力
图6
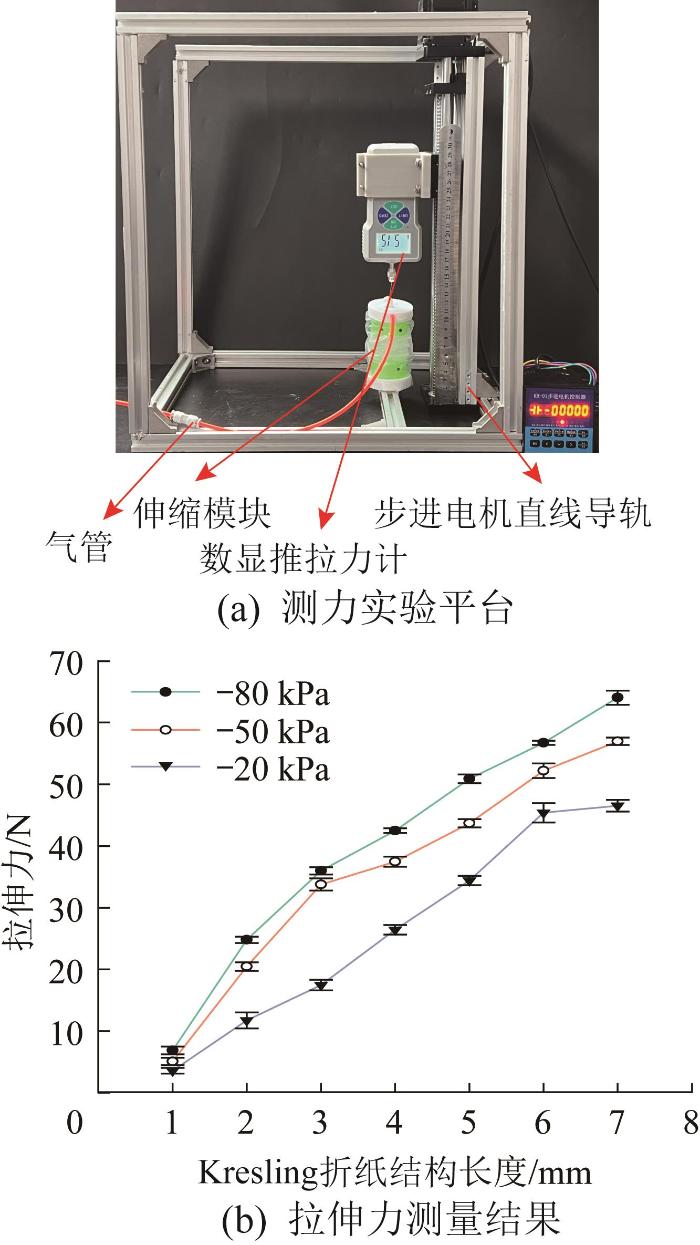
图6
伸缩模块的测力实验平台及拉伸力测量结果
Fig.6
Force test platform and tensile force measurement results of telescopic module
为了提高爬壁机器人的爬行速度,需确定合适的Kresling折纸结构厚度。爬行速度与伸缩模块的伸缩量和伸缩速率有关,而伸缩模块的伸缩量和伸缩速率均与折纸结构厚度直接相关,厚度越大,折纸结构弹性越大,则抽负压时收缩速率越小,甚至不收缩。伸缩模块在折纸结构弹力作用下伸展,并在伸展过程中向外部排出气体,由于环境密封,排出气体时间影响伸展速率,不同厚度折纸结构的伸展速率相差不大。因此,提升爬行速度主要取决于收缩速率和收缩量。在驱动气压分别为-80、-40、-20 kPa时,测得不同Kresling折纸结构厚度(0.2、0.3、0.5 mm)下伸缩模块的收缩量及收缩速率,如图7所示。结果表明,折纸结构厚度为0.2 mm时伸缩模块在-20 kPa的驱动气压下能够完全被压缩,其最大收缩量为85 mm,最大收缩速率为40 mm/s。由此可知,选用0.2 mm厚的Kresling折纸结构能够有效提升爬壁机器人的爬行速度。
图7
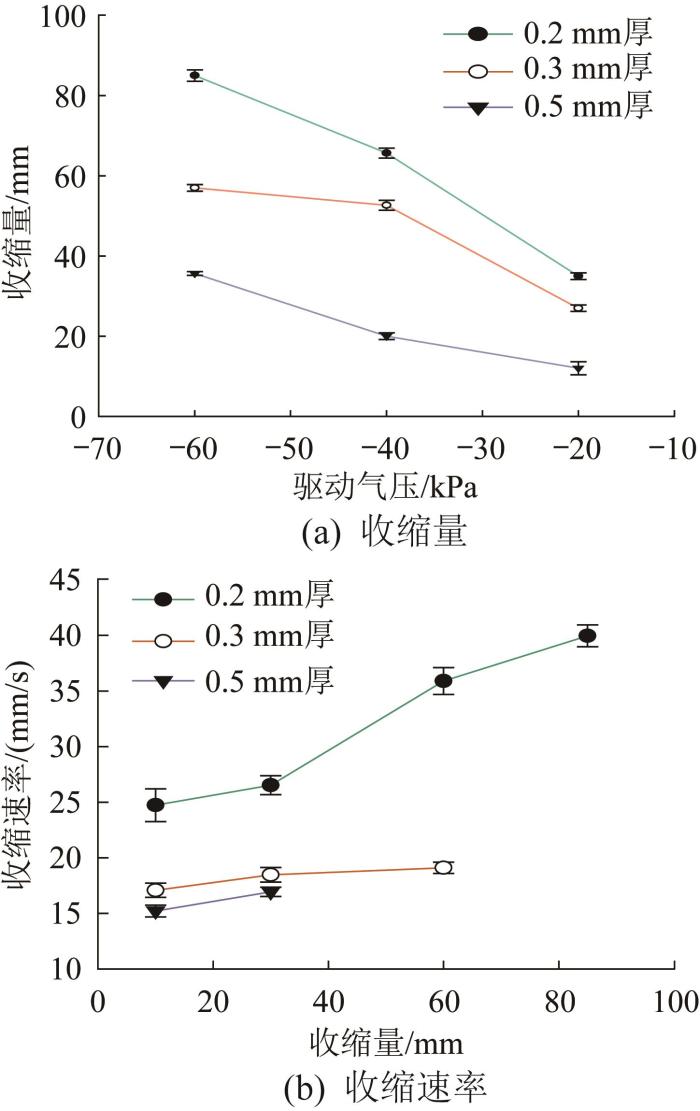
图7
Kresling折纸结构厚度不同时伸缩模块的收缩量及收缩速率
Fig.7
Shrinkage amount and shrinkage rate of telescopic modules with different thicknesses of Kresling origami structure
爬壁机器人的爬行稳定性不仅与伸缩模块的收缩速率有关,还与伸缩模块所能承受的径向力与回弹力有关。Kresling折纸结构采用柔性材料,但机器人爬壁时身体须保持伸直状态,这样锚定模块才能锚定在壁面上,从而实现竖直向上的稳定爬行。因此,伸缩模块要保持一定的刚度,这对Kresling折纸结构的层数有一定的要求。图8展示了Kresling折纸结构层数不同时(6层和10层)伸缩模块的刚度。由图可知,当折纸结构为10层时,伸缩模块的刚度不满足要求,机器人两端均会产生形变,影响锚定模块的锚定效果,从而无法实现在竖直壁面上的稳定爬行。
图8

图8
Kresling折纸结构层数不同时伸缩模块的刚度对比
Fig.8
Stiffness comparison of telescopic modules with different layers of Kresling origami structure
为了实现爬壁机器人在竖直壁面上的稳定爬行,需确定合适的Kresling折纸结构层数。考虑Kresling折纸结构的特性,偶数层折纸结构收缩时不会产生扭转,能够使锚定模块在爬行时一直紧贴壁面。在测力实验平台上对Kresling折纸结构层数分别为4、6、10时的机器人进行侧向力和回弹力测量,结果如图9所示(锚定模块、塑料外壳、塑料筒等的质量约为150 g,即1.47 N)。由图9可看出,当折纸结构为6层时,机器人的回弹力为16.3 N,侧向力为1.9 N;当折纸结构为4层时,机器人的回弹力为15.4 N,侧向力为2.8 N。由此可知,Kresling折纸结构为4层和6层时,机器人的回弹力和侧向力均满足要求。回弹力是保证机器人伸缩模块伸展的动力,而侧向力用于保证机器人爬行时的刚度,即保证头部和尾部一直与壁面贴合。折纸结构层数越多,则伸缩模块的伸缩量越大,机器人在单个运动周期内的爬行距离越大。然而,由于伸缩模块变形需要时间,这会限制驱动气压的频率,在驱动气压频率无法提高的前提下,为提高机器人的爬行速度,宜选择伸缩量大的折纸结构。因此,6层的Kresling折纸结构是最佳选择。
图9
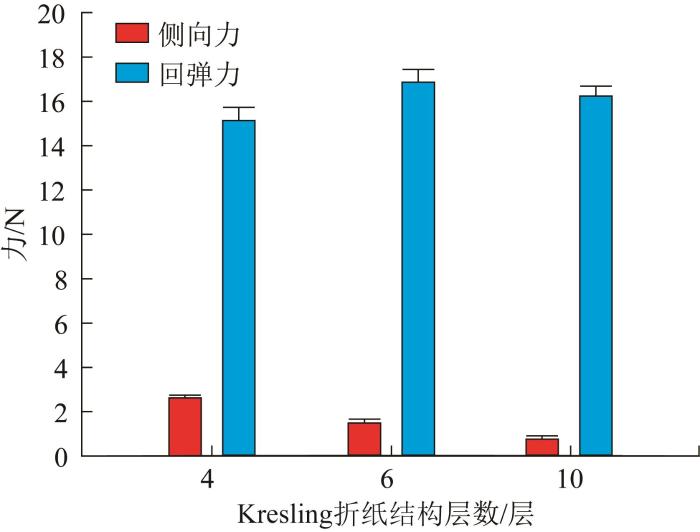
图9
Kresling折纸结构层数不同时机器人的回弹力和侧向力
Fig.9
Rebound force and lateral force of robots with different layers of Kresling origami structure
1.4 锚定模块选用与分析
锚定模块影响爬壁机器人爬行稳定性的因素主要有3个:吸盘吸附力、吸附成功率和脱附成功率。1)吸盘吸附力:机器人整体质量约为250 g,选用直径为40 mm的吸盘,其侧向吸附力为20 N,能在保证机器人结构紧凑的同时满足爬行稳定性的要求。2)吸附成功率:选用双层吸盘以提高吸附成功率,相较于单层吸盘,双层吸盘的底部更为柔软,在爬行过程中更易吸附成功。3)脱附成功率:双层吸盘具有弹性,当停止负压驱动时,吸盘可立即脱落,使得锚定模块快速解除锚定。采用双层吸盘的锚定模块可为爬壁机器人实现快速稳定爬行提供有利的锚定条件。
2 气动爬壁机器人的爬行性能分析
2.1 机器人样机与控制系统
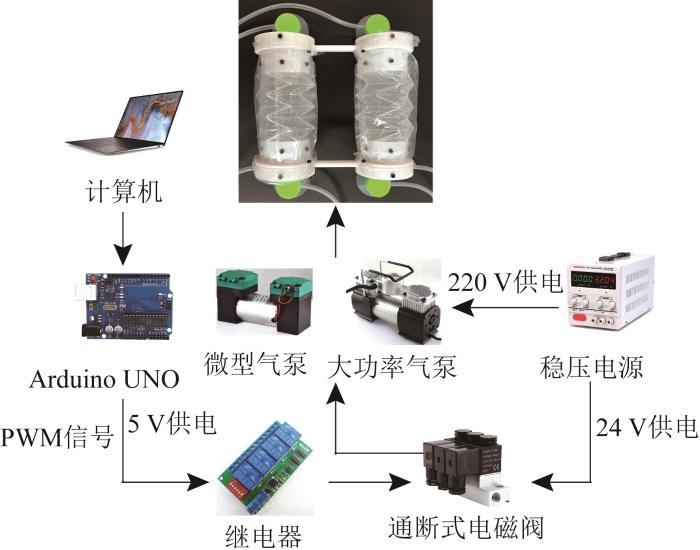
本文所设计的爬壁机器人的样机与控制系统如图10所示。控制系统主要由计算机、Arduino UNO开发板、通断式电磁阀、继电器、稳压电源和气泵等组成。利用计算机编写程序并烧录进Arduino UNO开发板后,开发板程序运行,PWM(pulse-width modulation,脉宽调制)信号传递给继电器,继电器控制电磁阀通断,从而实现电磁阀对锚定模块和伸缩模块的控制。在Arduino程序中,设置高低电平变换的时间(频率),以控制机器人的爬行速度,通过编写不同的控制程序来实现机器人在壁面上的变速爬行、前进、后退、向左转弯和向右转弯等。其中:Arduino UNO开发板由计算机单独供电;气泵由稳压电源提供220 V电压;电磁阀由稳压电源提供24 V电压;继电器由开发板提供5 V电压。为方便对结构调整后的机器人进行控制,在铝架控制平台上留空余位置,以便在机器人结构调整后添加相应的控制元件。
图10
2.2 竖直爬壁分析
为了验证所设计的爬壁机器人的直线爬行性能,在竖直木板上开展单向爬行测试(驱动气压为-80 kPa,控制平台开关气泵的频率分别为1 s和0.8 s),爬行过程如图11所示。单个爬行循环包括5种状态:初始状态、头部锚定、身体收缩、尾部锚定和身体伸展。结果显示:该机器人可在7.5 s内沿竖直木板向上爬行200 mm,锚定时间仅为0.6 s,伸缩模块的收缩和伸展时间分别为0.8 s和1.2 s。实验数据表明,由于双层吸盘的吸附作用,机器人的锚定模块能够在短时间内锚定在壁面上。通过计算可得,机器人的平均爬行速度为26.7 mm/s。由此说明,采用PP磨砂半透明塑料板折成的Kresling折纸结构具有质量小、储能高的特点,可实现机器人在竖直壁面上的快速爬行。竖直爬壁实验结果验证了机器人结构设计的可行性。
图11
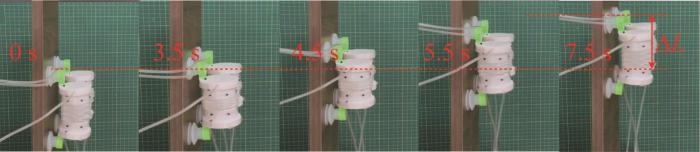
图11
机器人的单向竖直爬壁过程
Fig.11
Unidirectional vertical wall-climbing process of robot
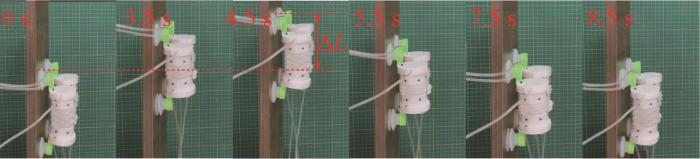
为进一步验证爬壁机器人在竖直壁面上的双向爬行能力,选用木板开展双向爬行实验(木板总长为125 mm,驱动气压条件与单向爬行时一致)。为确定机器人到达木板顶端所需的步态,先开展预爬行实验,并根据预爬行实验结果改变控制程序,使得机器人在爬到木板顶端后向下爬行,爬行过程如图12所示。结果显示,在双向运动场景下,机器人在竖直木板上先作爬升运动,用时5.3 s,再向下作回程运动以回到初始位置,用时3.2 s,总爬行距离为250 mm,爬行速度约为30 mm/s。双向爬行实验结果表明,所设计的爬壁机器人具有双向爬行的能力,且在自身重力的影响下,向下的爬行速度更快。
图12
2.3 负重爬行分析
为了验证爬壁机器人拉取重物的能力,在不同坡度的玻璃板上开展负重爬行测试。将50 g砝码连接在机器人尾部,并在长度为1 000 mm的玻璃板(坡度分别为30°、60°、90°)上进行多次爬行测试,结果如图13所示(驱动气压条件与2.2节同)。结果显示:当玻璃板坡度从30°增大到90°时,机器人的最大爬行速度没有明显下降,说明该机器人在不同坡度的玻璃板上均能负重爬行。玻璃板坡度为60°时机器人的爬行速度较坡度为30°时的有小幅度提升。这是因为机器人在有坡度的玻璃板上爬行时会对玻璃板产生压力作用,而60°下所产生的压力比30°下的小,则爬行时机器人所需克服的摩擦力较小,更容易爬行,且爬行速度较快。负重爬行实验结果表明,在一定的负压下,所设计的爬壁机器人在倾斜壁面上具备良好的负重爬行能力。
图13
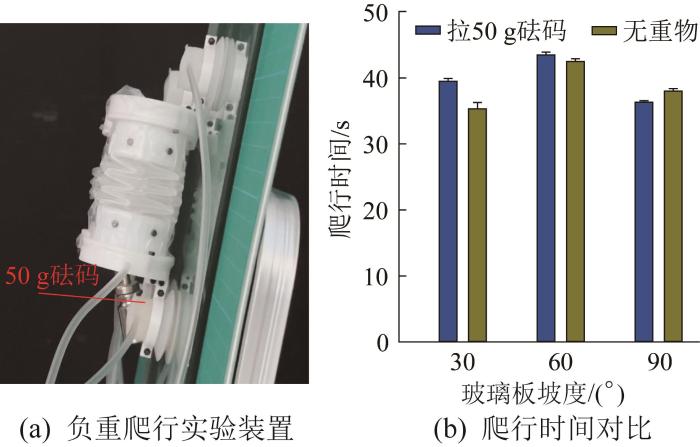
图13
机器人负重爬行实验装置及结果
Fig.13
Experimental device and results of robot crawling with load
2.4 转弯爬行分析
为了验证爬壁机器人的转弯性能,在有刻度的塑料板上开展转弯爬行实验。将机器人右伸缩模块的驱动气压分别设定为-80、-50、-20 kPa(控制平台开关气泵的频率分别为1 s和0.8 s),记录机器人在爬行过程中转180°所需的时间。机器人在驱动气压为-50 kPa下转180°的过程如图14所示。结果表明,机器人在爬行过程中转180°历时20个周期(伸缩模块伸缩一次为1个周期)。机器人在不同驱动气压下的转弯时间如图15所示。由图15可知,相比于-50、-20 kPa驱动气压下,-80 kPa下机器人转180°所需的时间最短,为19.4 s,转弯速度为9.3 (°)/s。由此说明,在一定的驱动气压频率下,负压越大,机器人的转弯速度越快。
图14
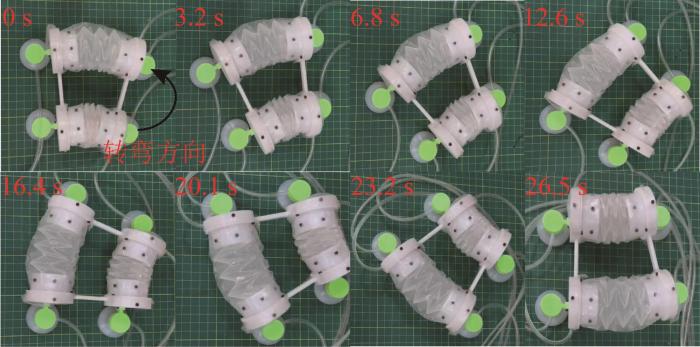
图14
机器人转弯过程(驱动气压为-50 kPa)
Fig.14
Turning process of robot (with driving pressure of -50 kPa)
图15
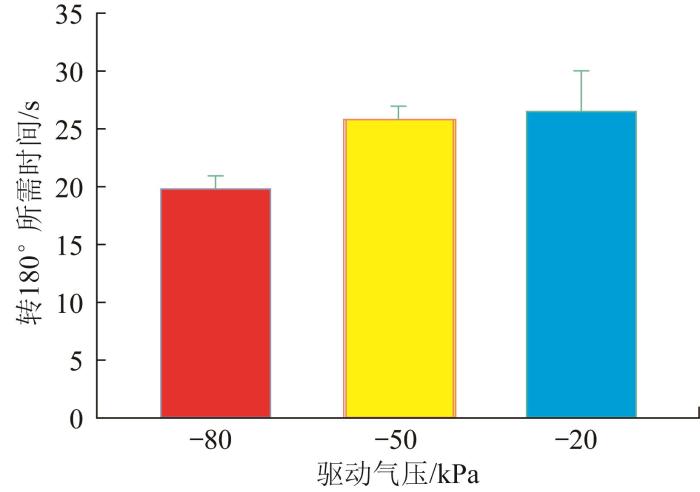
图15
不同驱动气压下机器人的转弯时间对比
Fig.15
Comparison of turning time of robot with different driving pressures
2.5 爬行适应性分析
为了评估爬壁机器人在坡度、材质不同的壁面上的自适应能力,分别在木板、塑料板、玻璃板上开展爬行测试。准备长600 mm、宽400 mm的木板、塑料板、玻璃板,将带有尺寸标记的3种壁面分别固定在可改变角度的支架上以设置相应的坡度;完成坡度设置后,把机器人放在壁面上并分别将机器人的驱动气压设定为-9、-24、-35 kPa,使机器人在坡度为0°、30°、60°、90°的木板、玻璃板、塑料板上爬行,共开展36组爬行实验,记录相关爬行数据。不同驱动气压下机器人在不同坡度、不同材质壁面上的爬行速度如图16所示。由图16可知,在相同的驱动气压与壁面坡度下,机器人在玻璃板上的爬行速度普遍比在其他2种壁面上的快,说明壁面越光滑,机器人的爬行速度越快;在水平爬壁状态(即坡度为0°)下,机器人在玻璃板上的爬行速度最快,可达28 mm/s;在竖直爬壁状态下,机器人在塑料板上的爬行速度最快,可达26 mm/s,这是因为机器人在竖直玻璃板上爬行时出现了打滑现象,爬行速度变慢。在坡度为90°的塑料板上,对机器人施加-9 kPa的驱动气压时,机器人无法完成爬行,说明壁面越粗糙,机器人爬行所需的驱动气压越大。根据图16所示的爬行速度,确定最佳的爬行条件为驱动气压为-35 kPa,该驱动气压下机器人的爬行演示如图17所示。实验结果表明,所设计的爬壁机器人在不同壁面环境下均能稳定、快速地完成爬行,说明其具有良好的壁面环境适应性。
图16
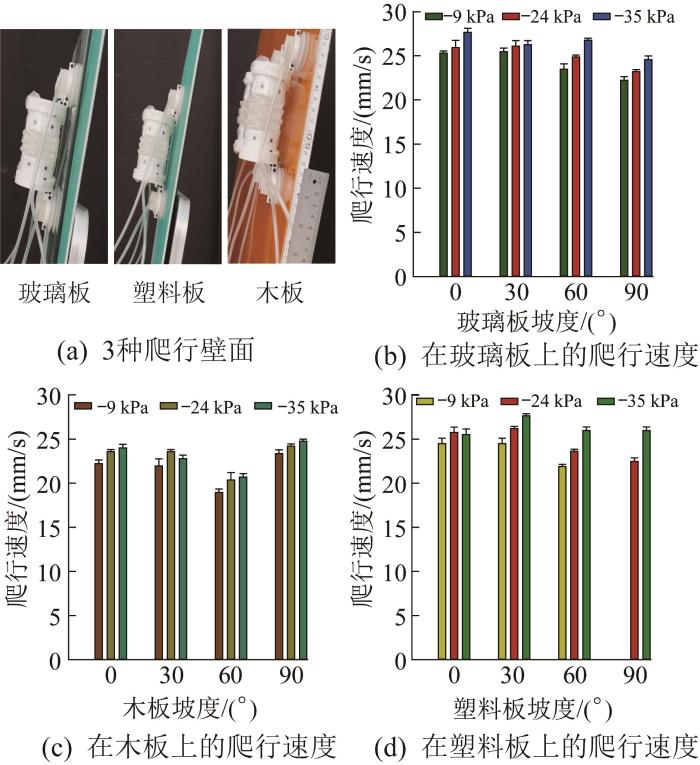
图16
机器人在不同壁面上的爬行速度对比
Fig.16
Comparison of crawling speed of robot on different walls
图17
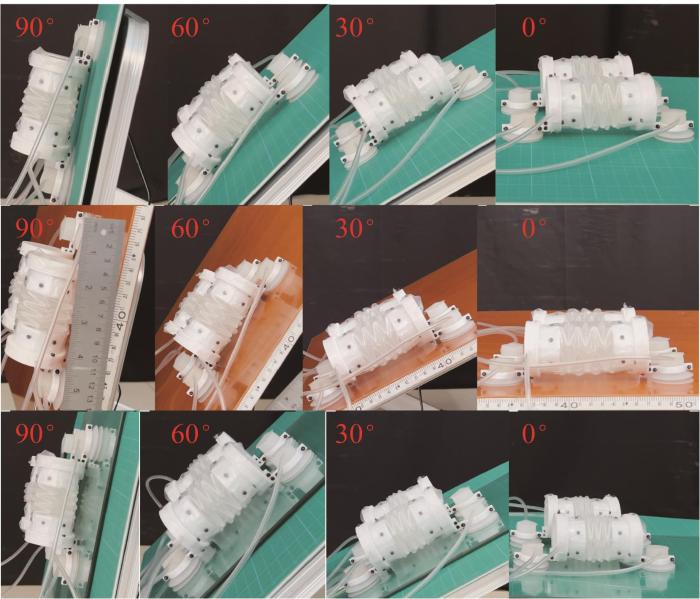
图17
机器人在不同壁面上的爬行演示(驱动气压为-35 kPa)
Fig.17
Demonstration of robot crawling on different walls (with driving pressure of -35 kPa)
爬壁机器人在不同坡度的壁面上稳定爬升的挑战在于平衡机器人的重量,即在伸缩模块伸缩的同时保证锚定模块能够稳定地在壁面上吸附与脱落。本文所设计的爬壁机器人能够在不同坡度的壁面上稳定爬行的原因如下:1)机器人采用塑料材质的Kresling折纸结构,整体质量较小;2)伸缩模块可提供较大的伸缩力来支撑机器人。相比于水平爬行,爬壁机器人的竖直爬行更具有挑战性,这是因为机器人竖直爬行时除了要克服自身重力外,还需要锚定模块在吸附后能提供足够大的摩擦力,故机器人两端的锚定模块必须有一个处于锚定状态,以避免机器人坠落。在竖直壁面上爬行时,当机器人头部的锚定模块处于非锚定状态,尾部的锚定模块处于锚定状态,伸缩模块处于完全伸展状态时,由于重力作用,伸缩模块的完全伸展长度略小于在水平壁面上的完全伸展长度,这会导致机器人爬行速度下降。当壁面坡度大于90°时,由于机器人自身重力和6根气管重力等因素的影响,锚定模块无法与壁面贴合以完成吸附,故机器人在坡度超过90°的壁面上无法实现爬行。
2.6 竖直壁面避障爬行
为了验证爬壁机器人的转弯灵活性,开展避障爬行实验(驱动气压条件与2.2节同)。在竖直木板上固定2个障碍物,令机器人从木板底部向上爬行并避开障碍物。机器人在竖直木板上的避障爬行过程如图18所示,具体如下:1)机器人先直行200 mm,从第1个障碍物到达第2个障碍物附近;2)机器人主动向左转弯80°,以调整位置和方向;3)机器人再次主动向右转弯120°,以调整位置和方向;4)机器人继续直行350 mm,完成避障运动。整个避障过程耗时75 s。机器人能够在竖直壁面上灵活避障的原因在于:Kresling折纸结构的柔顺性使得机器人能够主动转弯,机器人通过直线爬行和主动转弯的相互配合,可灵活避开障碍物并爬到目的地。竖直壁面避障爬行实验结果验证了所设计的爬壁机器人可通过自适应改变自身形状来实现灵活转弯。
图18
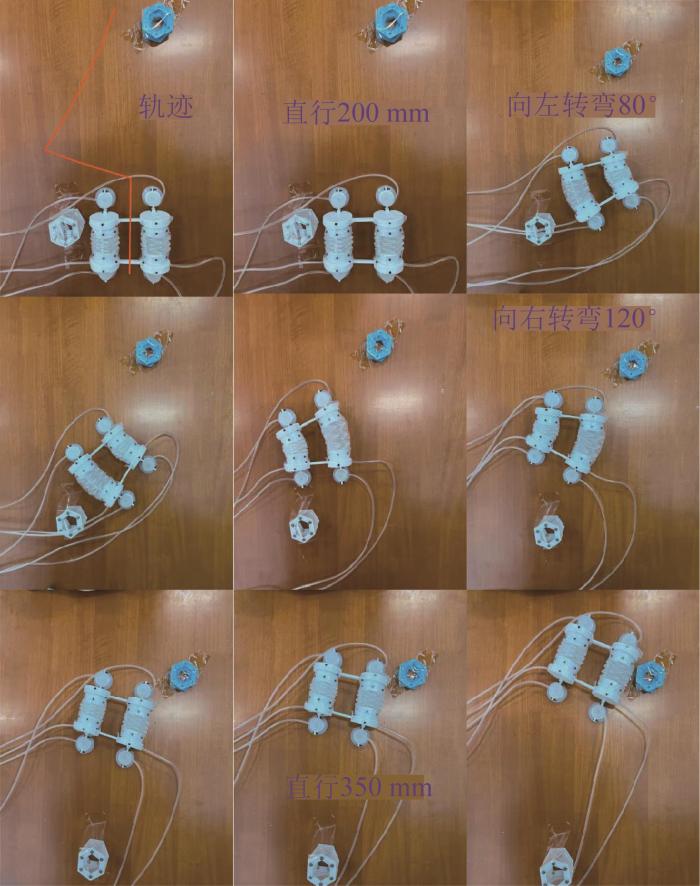
图18
机器人在竖直壁面上的避障爬行过程
Fig.18
Obstacle-avoidance crawling process of robot on vertical wall
3 结 论
现有软体爬壁机器人因柔性材料的低刚度和滞后性,普遍存在驱动力不足及运动稳定性差的问题。针对这一问题,本文基于Kresling折纸结构设计了一种可灵活爬行的气动爬壁机器人。该机器人由锚定模块和伸缩模块组成。通过实验对机器人的双向爬行、负重爬行、灵活转弯性能以及自适应性进行了测试。结果表明:该机器人具备良好的柔顺性和适应性,能够适应不同材质的复杂壁面环境。与现有刚性爬壁机器人相比,基于Kresling折纸结构的气动爬壁机器人具有抗冲击的特点,且爬行稳定性显著提高。此外,所设计的爬壁机器人结构紧凑且功能多样,其整体尺寸仅为202 mm×105 mm,可在坡度为0°~90°的不同壁面上稳定地双向爬行、灵活转弯和负重爬行。研究结果可为软体爬壁机器人的设计和优化提供新思路。
然而,本文所设计的爬壁机器人在壁面上的转弯爬行是通过机器人的整体柔顺性来实现的。在遇到需要跨越的壁面环境时,该机器人无法完成灵活转弯,这说明机器人伸缩模块的柔顺性未得到充分利用。在未来的研究中,将会对机器人结构进行优化设计,增加主动跨越障碍和跨越壁面的结构,使机器人具备在三维空间内爬壁的能力,从而适应更加复杂的壁面环境。
参考文献
A survey of wall climbing robots: recent advances and challenges
[J].
Survey on glass and façade-cleaning robots: climbing mechanisms, cleaning methods, and applications
[J].
Soft crawling robots: design, actuation, and locomotion
[J].
Mini-WhegsTM climbs steep surfaces using insect-inspired attachment mechanisms
[J].
Series of multilinked caterpillar track-type climbing robots
[J].
Inverted and vertical climbing of a quadrupedal microrobot using electroadhesion
[J].
Propeller-type wall-climbing robots: a review
[J].
Multigait soft robot
[J].
Design, fabrication and control of soft robots
[J].
A resilient, untethered soft robot
[J].
Design and implementation of a soft robotic arm driven by SMA coils
[J].
Bioinspired triboelectric soft robot driven by mechanical energy
[J].
Switchable adhesion actuator for amphibious climbing soft robot
[J].
Perching and takeoff of a robotic insect on overhangs using switchable electrostatic adhesion
[J].
A paper-based wall-climbing robot enabled by electrostatic adhesion
[C]//
Review of dielectric elastomer actuators and their applications in soft robots
[J].
微型仿尺蠖软体机器人的设计与实验
[J].
Design and experiment of miniature inchworm-like soft robot
[J].
Interfacing soft and hard: a spring reinforced actuator
[J].
Inchworm inspired multimodal soft robots with crawling, climbing, and transitioning locomotion
[J].
A minimally designed soft crawling robot for robust locomotion in unstructured pipes
[J].
基于Kresling折纸结构的软体管道机器人设计
[J].
Design of soft pipeline robot based on Kresling origami structure
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}