基于Kresling折纸结构的气动爬壁机器人设计与性能分析
Design and performance analysis of pneumatic wall-climbing robot based on Kresling origami structure
基于Kresling折纸结构的气动爬壁机器人设计与性能分析 |
| 楚凯,张宇,王家梁,周浩,舒申,胡俊峰 |
|
Design and performance analysis of pneumatic wall-climbing robot based on Kresling origami structure |
| Kai CHU,Yu ZHANG,Jialiang WANG,Hao ZHOU,Shen SHU,Junfeng HU |
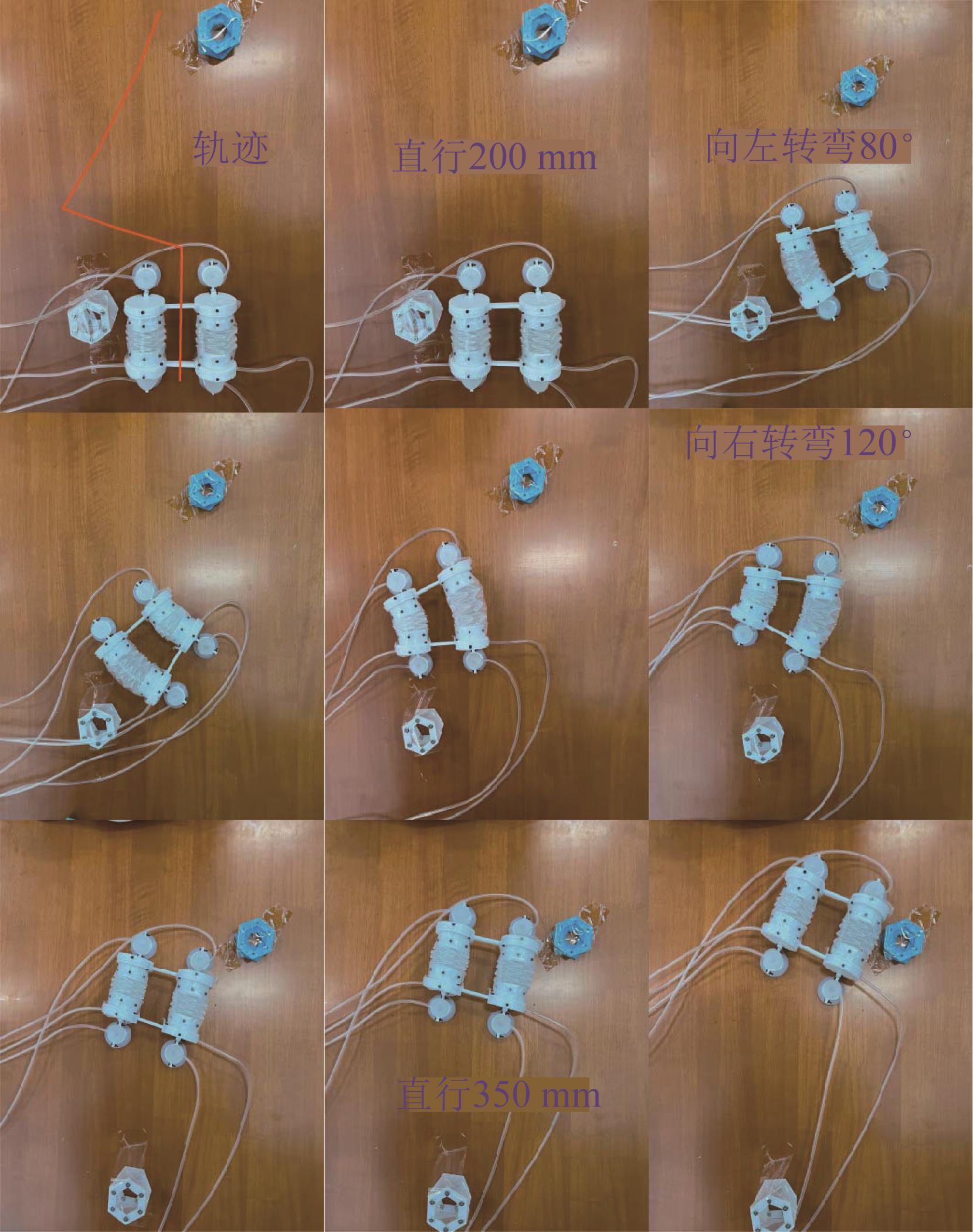
| 图18 机器人在竖直壁面上的避障爬行过程 |
| Fig.18 Obstacle-avoidance crawling process of robot on vertical wall |
|
|