本文链接 :https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2024.03.193
煤矿井下巷道路面泥泞且凹凸不平,在救援履带机器人行驶过程中,其搭载的精密仪器会受到不同程度的振动影响。因此,研究履带机器人在不同路况下的适应性和振动响应特性具有重要意义。履带机器人所受的振动激励主要来源于地面与履带、履带与支重轮之间的接触碰撞,接触力通过悬挂系统传递到车身,故支重轮所受的激励会直接影响履带机器人的附着性能、牵引性能及行驶安全性[1 ] 。
近年来,国内外学者针对履带机器人的平顺性及其振动响应特性做了大量研究。马星国等[2 ] 、赵旗等[3 ] 、Ata等[4 ] 通过建立履带车辆的刚度-质量-阻尼振动模型,探讨了不同路面形态、不同悬架配置对履带车辆平顺性的影响。Miao等[5 ] 基于多体系统传递矩阵法对履带车辆系统的振动特性进行了分析。朱兴高等[6 ] 、张新等[7 ] 采用多体动力学仿真方法,研究了行驶速度、路面不平度和履带板参数对履带机器人动态特性的影响。Li等[8 ] 采用离散方法求解履带车辆的耦合动力学方程,得到了其质心的加速度和驱动链轮的牵引力。孟磊等[9 ] 建立了履带车辆-履带动力学模型和未考虑履带的履带车辆-试验台架动力学模型,探讨了有无履带状态下车辆振动响应的差异。Dchoi等[10 ] 建立了考虑履带影响的履带机器人三维实体模型,分析了履带与刚性地面之间的相互作用以及履带对路面激励的影响。乔新勇等[11 ] 在考虑履带环影响的条件下分析了履带车辆的振动响应,并对基于柔性履带模型与刚性履带模型的仿真结果进行了比较。李春明等[12 ] 建立了履带车辆的纵向-垂向耦合动力学模型,探讨了垂向、俯仰运动对履带车辆机动性的影响规律。上述文献针对履带机器人行驶系统的多体耦合关系以及履带机器人的振动响应特性进行了深入研究,但较少涉及履带机器人支重轮在不同行驶状态下的振动响应研究。
为此,笔者根据矿用救援履带机器人的行驶特点,分别建立履带机器人支重轮-履带-地面多体耦合系统的振动理论估算模型和动力学仿真模型,并开展外路实验,以分析行驶速度、路面激励对机器人车体及支重轮振动响应的影响,旨在为履带机器人的平顺性研究提供理论支撑。
1 支重轮-履带-地面多体耦合系统的振动理论估算模型
1.1 单支重轮非线性悬挂系统模型
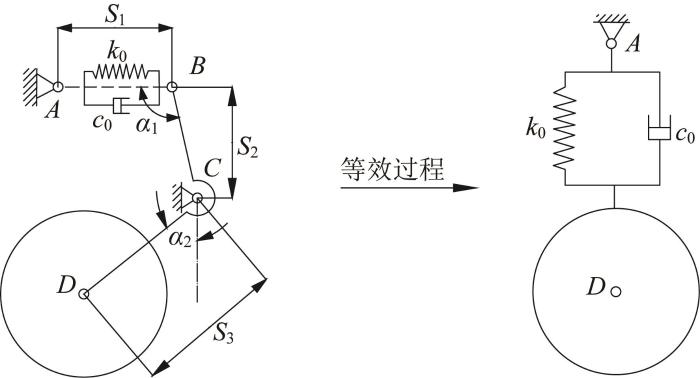
悬挂系统连接履带机器人的车体与支重轮,是机器人减振的关键部件,可保证支重轮载荷稳定[13 ] 。在履带机器人悬挂系统动力学研究中,常常将单个悬挂系统与支重轮及履带的相互作用简化为质量-刚度-阻尼形式。
图1 所示为履带机器人单支重轮悬挂系统的等效模型。图中:A 点表示减振器与车体的固定连接点;杆BCD 表示平衡肘,平衡肘通过螺栓与减振器连接于B 点,B 点位于限位槽内,可在限位槽范围内运动;支重轮中心与平衡肘连接于D 点;平衡肘通过螺栓与车体连接于C 点,连接点C 处可转动。各参数定义如下:k 0 c 0 为减振器的实际刚度、阻尼,S 1 S 2 S 3 α 1 α 2
图1
图1
单支重轮悬挂系统等效模型
Fig.1
Equivalent model of single supporting wheel suspension system
当行驶路面不平时,路面激励通过履带作用在支重轮上,平衡肘在减振器的作用下发生偏转(在限位槽范围内),使得支重轮上下移动,以提高履带机器人的行驶平顺性。假设平衡肘的偏转角度为Δ α Δ x Δ y k e c e
k e Δ x S 3 s i n α 2 + Δ α = k 0 Δ y S 2 s i n π - α 1 + Δ α (1)
支重轮移动距离Δ x Δ α
Δ x = S 3 c o s α 2 - c o s α 2 + Δ α (2)
Δ y = S A C 2 + S 2 2 - 2 S A C S 2 c o s ∠ B C A - S A C 2 + S 2 2 - 2 S A C S 2 c o s ∠ B C A - Δ α (3)
当减振器被拉长或压缩时,减振器与平衡肘支点的夹角α 1 S 2 A 、C 之间的距离S A C 式(3)可简化为:
Δ y ≈ S 2 s i n Δ α (4)
将式(2)与式(4)代入式(1)并进行一定的简化,可得到悬挂系统的等效刚度k e
k e = k 0 S 2 2 s i n α 2 + Δ α s i n Δ α S 3 2 c o s α 2 - c o s α 2 + Δ α s i n α 2 + Δ α (5)
c e Δ x ˙ S 3 s i n α 2 + Δ α = c 0 Δ y ˙ S 2 s i n α 1 + Δ α (6)
c e = c 0 S 2 2 c o s Δ α s i n α 1 + Δ α S 3 2 s i n 2 α 2 + Δ α (7)
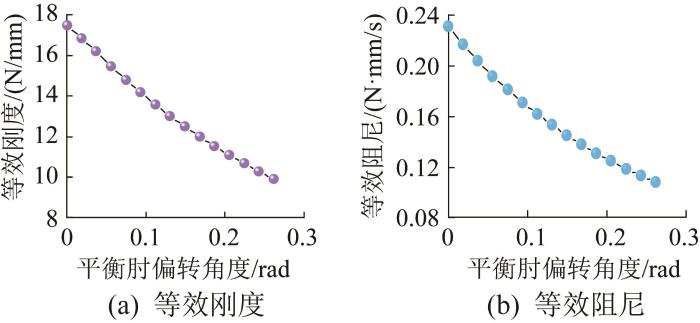
由于履带机器人限位槽的作用,平衡肘的最大偏转角度为π / 12 k e c e Δ α 图2 所示。由图2 可以看出,悬挂系统的等效刚度、等效阻尼均随平衡肘偏转角度的增大而减小,这表明在限位槽允许范围内,悬挂系统在路面起伏较大时的减振效果更为突出。
图2
图2
悬挂系统等效刚度、阻尼随平衡肘偏转角度的变化曲线
Fig.2
Variation curve of equivalent stiffness and damping of suspension system with deflection angle of balance elbow
通过上文分析可知,悬挂系统的等效刚度k e c e Δ α Δ α [14 ] :
Δ α = a r c c o s c o s α 2 - Δ x S 3 - α 2 (8)
其中,5个支重轮对应的减振器的拉长/压缩量∆ y i i =1, 2,…, 5)与履带机器人车体的垂向位移变化量Δ x z φ
Δ y 1 = Δ x z + 2 l φ - q 1 t Δ y 2 = Δ x z + l φ - q 2 t Δ y 3 = Δ x z - q 3 t Δ y 4 = Δ x z + l φ - q 4 t Δ y 5 = Δ x z + 2 l φ - q 5 t (9)
式中:q i t l 为各支重轮轮心的间距。
1.2 考虑履带滤波作用的路面激励模型
路面激励作为履带机器人振动系统的输入,其时间功率谱密度除了与空间功率谱密度相关外,还与机器人行驶速度相关[15 ] 。鉴于路面激励的功率谱密度在整个频率范围内为常数,其特性与白噪声功率谱特性一致,因此路面激励输入可用白噪声模拟,其时域模型可表示为[16 ] :
Q ˙ t = - 2 π n 0 v Q t + 2 π n 0 G q n 0 v w t (10)
式中:Q t n 0 n 0 = 0.1 m - 1 v 为履带机器人行驶速度;G q n 0 w t
在履带机器人行驶过程中,履带板对高频率的路面激励有良好的滤波作用。履带对路面激励的滤波作用类似于一阶低通滤波器。因此,本文采用一阶低通滤波器对基于白噪声生成的路面激励模型进行处理,以反映履带对路面激励高频成分的滤波作用。
根据一阶低通滤波器的幅频特性,得到履带的滤波函数G ( n )
G n = G 0 1 + n / n u 2 (11)
式中:G 0 n 、n u 为空间频率及其上限。
由于履带滤掉了路面激励中比履带板节距空间频率n T n T = 1 / t T t T t T n T n u [17 ] ,即式(11)中n u = n T
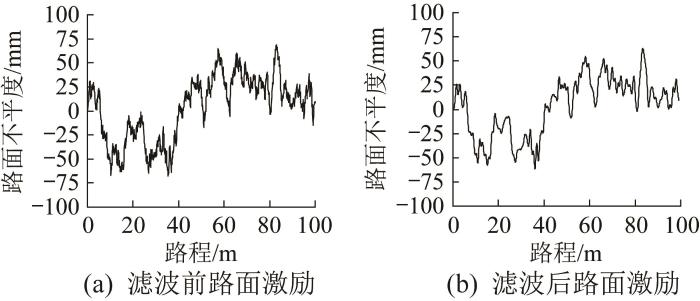
对长度为100 m的B级(沥青路面)、D级(压实土路)、E级(碎石路面)路面进行滤波处理分析。由于篇幅限制,仅给出考虑履带滤波作用前后的E级路面激励时域图,如图3 所示。由图3 可以看出,经履带滤波后E级路面激励中大于履带板节距空间频率的成分已被滤掉,该路面激励可直接作用于支重轮。
图3
图3
滤波前后E 级路面不平度对比
Fig.3
Comparison of E-class road unevenness before and after filtering
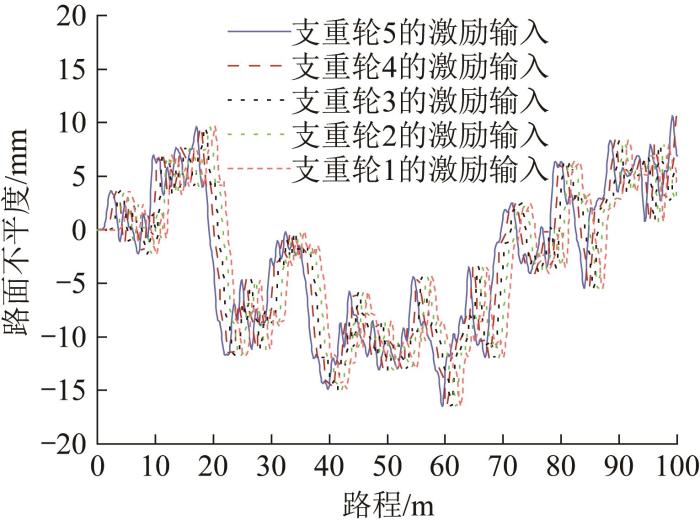
在构建履带机器人的路面激励模型时,还需考虑路面激励作用于各支重轮的延时性。假设每个支重轮所受的路面激励相同,但在履带机器人实际行驶过程中,5个支重轮依次通过不平路面,即路面激励对每个支重轮的作用时间不同[18 ] 。因此,在模拟路面激励时,应根据履带机器人的行驶速度以及支重轮之间的相对距离,对加载在各支重轮上的路面激励设置时间差,以更好地模拟路面激励对履带机器人行驶平顺性的影响。图4 所示为B级路面下履带机器人行驶速度为1 m/s时,最终作用于单侧5个支重轮上的路面激励。
图4
图4
考虑延时性的支重轮路面激励输入
Fig.4
Road excitation input of supporting wheel considering delay
1.3 七自由度半车模型
履带机器人是一个复杂的多自由度系统,在保证其动力学模型计算精度和完整性的前提下,作以下假设[17 ] :
1)履带机器人所行驶的路面为刚性路面,且作用于两侧履带的路面激励相同,仅作用时间上存在延迟。
2)履带机器人各支重轮具有相同的刚度特性及阻尼特性,且各支重轮所受的力均作用于轮心。
3)整个履带机器人车体相对于质心对称,不计车体的侧摆运动。
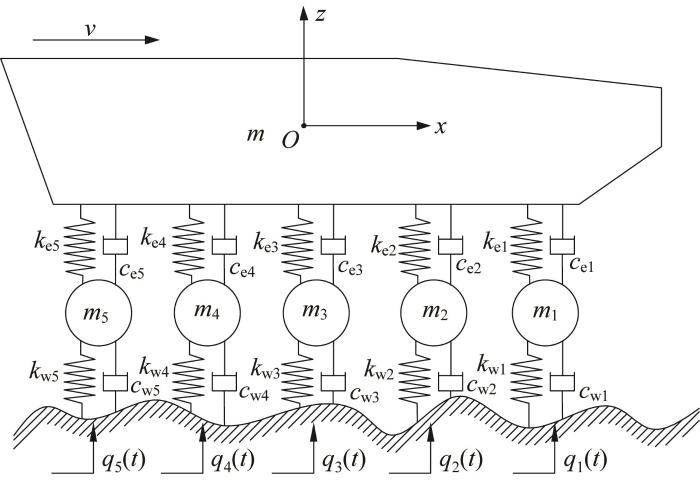
图5 所示为单侧五支重轮履带机器人的七自由度半车模型。图中:k e1 、k e2 、k e3 、k e4 、k e5 分别表示5个支重轮的悬挂系统的等效刚度,c e1 、c e2 、c e3 、c e4 、c e5 分别表示5个支重轮的悬挂系统的等效阻尼,k w1 、k w2 、k w3 、k w4 、k w5 分别表示5个支重轮的刚度,c w1 、c w2 、c w3 、c w4 、c w5 分别表示5个支重轮的阻尼,m 1 、m 2 、m 3 、m 4 、m 5 分别表示5个支重轮的质量,m
图5
图5
履带机器人的七自由度半车模型
Fig.5
Seven-degree-of-freedom semi-vehicle model of tracked robot
根据牛顿第二运动定律,可得履带机器人半车模型的振动微分方程:
m Δ x z = F e 1 + F e 2 + F e 3 + F e 4 + F e 5 I φ ¨ = F e 1 l 1 + F e 2 l 2 + F e 3 l 3 - F e 4 l 4 - F e 5 l 5 m 1 Δ x ¨ 1 = F w 1 - F e 1 m 2 Δ x ¨ 2 = F w 2 - F e 2 m 3 Δ x ¨ 3 = F w 3 - F e 3 m 4 Δ x ¨ 4 = F w 4 - F e 4 m 5 Δ x ¨ 5 = F w 5 - F e 5 (12)
式中:F e i i =1, 2, …, 5)为各悬挂系统作用于机器人车体的力,F w i li 为各支重轮到机器人车体质心的距离,I xOz 平面的转动惯量,Δ x i
各悬挂系统作用于机器人车体的力F e i F w i
F e i = k e i Δ x i - Δ x b i + c e i Δ x ˙ i - Δ x ˙ b i F w i = k w i q i ( t ) - Δ x i (13)
Δ x b i = Δ x z - l i φ
式中:Δ x b i
将式(5)、式(7)、式(9)和式(12)代入式(13),即可得到关于履带机器人车体及单侧支重轮垂向位移变化量Δ x z φ
Δ x ¨ z t = f Δ x z t , Δ x ˙ z t , φ t , φ ˙ t φ ¨ t = g Δ x z t , Δ x ˙ z t , φ t , φ ˙ t Δ x ¨ 1 t = y Δ x z t , Δ x ˙ z t , Δ x 1 t , φ t , φ ˙ t ⋯ ⋯ Δ x ¨ 5 t = y Δ x z t , Δ x ˙ z t , Δ x 5 t , φ t , φ ˙ t (14)
2 履带机器人的动力学仿真模型
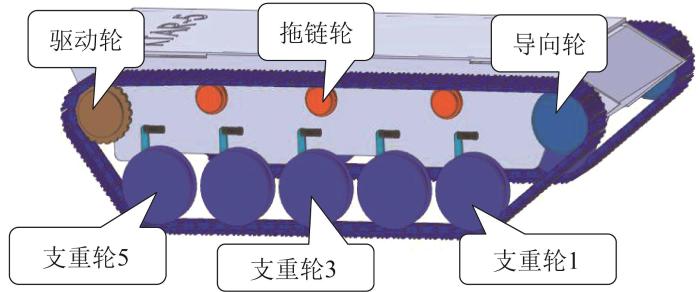
在SolidWorks软件中创建履带机器人车体部分的三维模型并将其导入多体动力学软件RecurDyn,添加其他结构后,建立各支重轮与车体之间的接触与约束。如图6 所示,履带机器人的动力学仿真模型与其实际外形尺寸一致,其单侧履带结构的主要部件包括1个驱动轮、1个导向轮、3个拖链轮、5个支重轮以及73块履带板。建模时将悬挂系统的刚度、阻尼简化为平衡肘与车体铰接处弹簧的刚度、阻尼系数。
图6
图6
履带机器人多体动力学仿真模型
Fig.6
Multi-body dynamics simulation model of tracked robot
采用step函数对驱动轮转动副定义速度—时间驱动函数。在本文中,履带机器人的行驶速度分别设置为0.5,1.0,1.5 m/s,驱动轮半径约为43.5 mm,则对应的驱动轮平均转速分别为110,220,330 r/min。因此,驱动函数分别定义为step(time, 0.1, 0, 1, -11.5)、step(time, 0.1, 0, 1, -23.3)、step(time, 0.1, 0, 1, -35.0),表示在0—1 s内履带机器人驱动轮的转速从0 r/min增大到规定转速,1 s后保持该转速匀速运动。
为使仿真模型与理论模型的路面激励输入一致,将路面激励理论模型转化为多体动力学软件可识别的三维实体模型。采用三维等效容积法建立三维路面模型。将B级、D级、E级路面的不平度作为三维路面模型的z 坐标,路面的宽度和长度分别为y 、x 坐标,利用MATLAB软件编程生成各个节点的三维坐标,并转换成含有节点向量矩阵与单元向量矩阵的文件[19 ] ,然后导入rdf格式的路面文件,生成可被多体动力学软件识别的三维路面模型。
3 履带机器人动力学仿真结果分析
3.1 行驶速度对履带机器人振动响应的影响
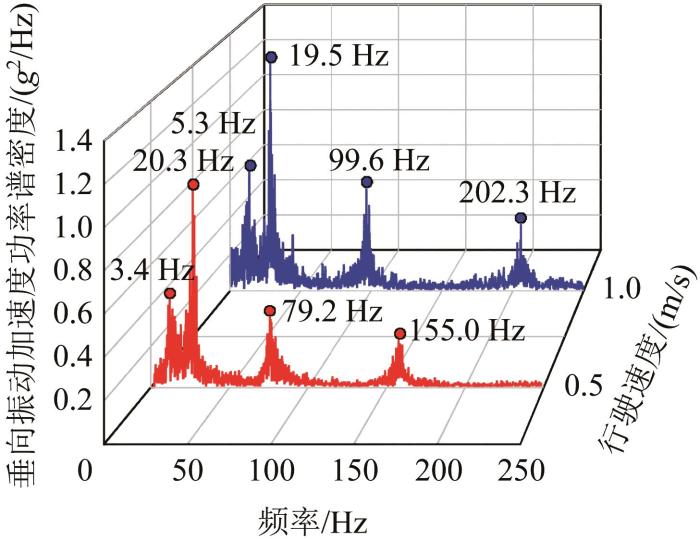
为分析行驶速度对履带机器人车体及支重轮振动响应的影响[20 ] ,通过动力学仿真分析得到履带机器人在B级路面上以0.5,1.0,1.5 m/s速度行驶时,其车体(质心处,下文同)的垂向振动加速度功率谱密度,如图7 所示。
图7
图7
不同行驶速度下履带机器人车体垂向振动加速度功率谱密度的仿真结果
Fig.7
Simulation result of vertical vibration acceleration power spectrum density of tracked robot body under different driving speeds
根据过往经验,履带机器人车体俯仰振动加速度的固有频率约为1.1 Hz,垂向振动加速度的固有频率约为1.5 Hz[17 ] 。由图7 可以看出,在0~2 Hz频段内,履带机器人在B级路面上以不同速度行驶时,其车体的垂向振动加速度功率谱密度曲线均有峰值。车体垂向振动加速度功率谱密度主要峰值出现在19 Hz左右,该频段为路面不平度所引起的激励频率,由此说明路面激励对车体垂向振动的影响较大,不同行驶速度下对应的垂向振动加速度功率谱密度幅值分别为0.808,1.060,1.188 g 2 /Hz。
从图7 中还可以看出,2~7 Hz的低频段主要为驱动轮的转动频率,该频率受履带机器人行驶速度的影响,该频段内不同行驶速度下对应的垂向振动加速度功率谱密度幅值为0.540,0.290,0.728 g 2 /Hz。75~117 Hz、150~230 Hz的高频段主要为由履带板节距造成的周期性激励频率以及驱动轮啮合频率的一倍频和二倍频,该频率与履带机器人行驶速度及履带板节距相关;随着行驶速度的增大,高频段内车体的垂向振动加速度功率谱密度峰值也增大。
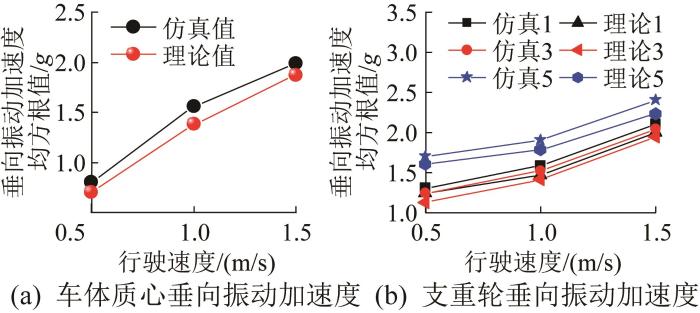
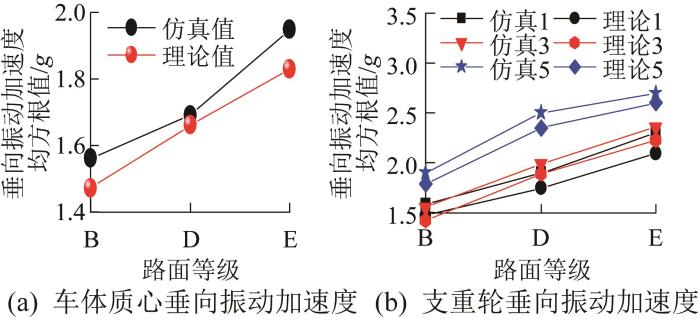
在5个支重轮所构成的5条振动传递路径中,履带机器人车体质心及支重轮1,3,5的垂向振动对路面激励最为敏感,故对车体质心及支重轮1,3,5的垂向振动加速度进行统计分析。利用均方根值定量分析支重轮-履带-地面多体耦合系统的振动响应特性,结果如图8 所示。图中:仿真1,3,5与理论1,3,5分别表示支重轮1,3,5的垂向振动加速度均方根的仿真值与理论值。
图8
图8
行驶速度对履带机器人车体及支重轮垂向振动的影响
Fig.8
Influence of driving speed on vertical vibration of tracked robot body and supporting wheel
由图8 可知,履带机器人车体质心及支重轮1,3,5的垂向振动加速度均方根随行驶速度的提高而增大,整体上呈先慢后快的变化趋势。其中,支重轮5的垂向振动加速度均方根值略大于支重轮1,3,这是因为支重轮5靠近主动轮,处于履带的驱动段,履带与主动轮啮合产生的多边形效应使驱动段履带的牵引力发生变化,从而对位于驱动段的支重轮5造成影响。根据机器人车体质心及支重轮垂向振动加速度均方根理论值与仿真值的对比,可知振动理论估算模型与动力学仿真模型的计算结果接近,仿真值略大于理论值,这是因为理论模型未考虑履带板连接处不平整对支重轮造成的周期性激励。
3.2 路面等级对履带机器人振动响应的影响
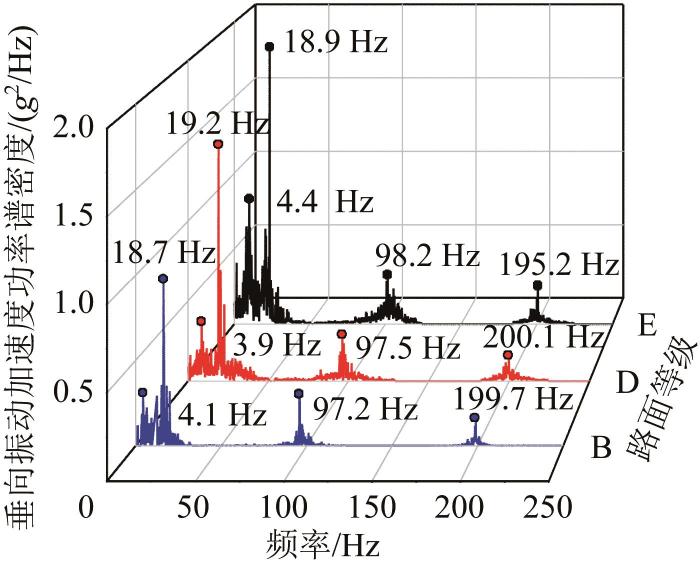
为了研究路面等级变化时履带机器人车体及支重轮垂向振动的变化规律,在保持行驶速度不变(1.0 m/s)的情况下分别设置B级、D级、E级路面,并进行动力学仿真分析。图9 所示为3种路面下履带机器人车体的垂向振动加速度功率谱密度对比。
图9
图9
不同路面下履带机器人车体垂向振动加速度功率谱密度的仿真结果
Fig.9
Simulation result of vertical vibration acceleration power spectrum density of tracked robot body under different roads
由图9 可知,该履带机器人在不同路面上以1 m/s的速度行驶时,其车体的垂向振动加速度功率谱密度的主要峰值出现在19 Hz左右处,随着路面不平度的增大,该频段内垂向振动加速度功率谱密度幅值也在增大,分别为1.060,1.460,1.820 g 2 /Hz。4 Hz左右的低频段主要为驱动轮的转动频率,对应的车体垂向振动加速度功率谱密度幅值分别为0.350,0.438,0.713 g 2 /Hz。97 Hz以及200 Hz左右的高频段主要为履带板节距造成的周期性激励频率及驱动轮啮合频率的一倍频和二倍频,该频段内路面不平度的增大对车体垂向振动加速度功率谱密度幅值的影响不大。
同样,对不同路面下履带机器人车体质心及支重轮1,3,5的垂向振动加速度进行统计分析,结果如图10 所示。图中仿真1,3,5和理论1,3,5的含义与图8 同。
图10
图10
路面等级对履带机器人车体及支重轮垂向振动的影响
Fig.10
Influence of road grade on vertical vibration of tracked robot body and supporting wheel
由图10 可知,履带机器人车体质心及支重轮1,3,5的垂向振动加速度均方根值随路面等级的提高而增大,这主要是因为在相同行驶速度下,路面激励幅度的增大使履带的作用力增大。
4 实验验证
为进一步验证上文构建的振动理论估算模型与动力学仿真模型的正确性,在B级路面上开展实车测试,履带机器人分别以约0.5 m/s和1.0 m/s的行驶速度通过测试路面。
履带机器人的外路测试装置以及数据采集仪器的安装位置如图11 所示。由于加速度传感器不能直接安装在支重轮上,将三向加速度传感器分别安装于支重轮1,3,5的悬挂系统与车体的连接处,从而间接测量支重轮的垂向振动加速度。将DH5902N坚固型数据采集分析系统与笔记本电脑连接,记录履带机器人行驶过程中车体质心及支重轮1,3,5的垂向振动加速度信号。此外,为确保履带机器人能在一段时间内保持0.5 m/s和1.0 m/s的行驶速度,将应变片贴于驱动轮上,并连接DH5905N无线扭矩测试分析系统以采集驱动轮的实时转速,以便在测试过程中对机器人行驶速度进行调整。
图11
图11
履带机器人外路实验测试装置
Fig.11
Test device for external experiment of tracked robot
在履带机器人行驶速度分别为0.5 m/s和1.0 m/s的条件下,驱动轮的实测转速如图12 所示。由图12 可知,驱动轮的实测转速均值为111 r/min和220 r/min,说明履带机器人的行驶速度可保持为0.5 m/s和1.0 m/s。
图12
图12
不同行驶速度下驱动轮的实测转速
Fig.12
Measured rotation speed of driving wheel under different driving speeds
通过实车测试得到履带机器人车体垂向振动加速度功率谱密度曲线,如图13 所示。由图13 可以看出,通过实验测得的履带机器人车体垂向振动加速度功率谱密度对应的高频成分频带较宽,这是因为实验中机器人驱动轮的转速并非恒定,而是在均值附近上下波动,这对与履带板节距相关的激励有较大扰动。通过对比图7 和图13 可知,在0~30 Hz的低频段内,履带机器人车体垂向振动加速度功率谱密度峰值对应频率的仿真结果与实测结果相吻合,均在19 Hz左右,由此说明所建立的动力学仿真模型较为合理。
图13
图13
不同行驶速度下履带机器人车体垂向振动加速度功率谱密度的实验结果
Fig.13
Experimental result of vertical vibration acceleration power spectrum density of tracked robot body under different driving speeds
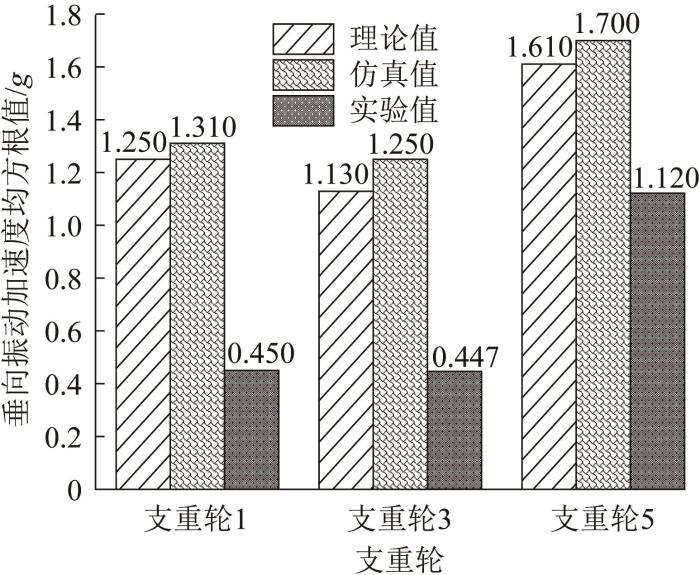
图14 所示为履带机器人以0.5 m/s速度在B级路面上行驶时支重轮1,3,5的垂向振动加速度均方根值。由图14 可以看出,支重轮5的垂向振动加速度比支重轮1,3的大,这与仿真结果和理论结果均一致;由于实验中测量的是各支重轮对应车体的垂向振动加速度,而悬挂系统有减振作用,故实测值小于仿真值和理论值,但仍可以间接验证所构建的振动理论估算模型与动力学仿真模型的正确性。
图14
图14
支重轮垂向振动加速度均方根值对比
Fig.14
Comparison of root mean square value of vertical vibration acceleration of supporting wheel
表1 所示为0.5,1.0 m/s行驶速度下(B级路上)履带机器人车体质心垂向振动加速度均方根的理论值、仿真值与实测值的对比。由表1 可以看出,履带机器人车体质心垂向振动加速度均方根的理论值与实测值的相对误差在25%以内,仿真值与实测值的相对误差在20%以内,说明仿真结果具有一定的参考价值。
5 结 论
本文建立了支重轮-履带-地面多体耦合系统的振动理论估算模型,研究了行驶速度、路面等级对履带机器人车体及支重轮垂向振动的影响规律。主要结论如下:
1)采用功率谱密度分析了履带与路面激振频率、履带与主动轮啮合频率以及履带板的周期性激励对履带机器人车体垂向振动的影响。结果表明,随着履带机器人行驶速度的提高,其车体在高频段内的垂向振动加速度功率谱密度峰值所对应的频率增大,由主动轮啮合产生的激励与履带板激励主要受行驶速度的影响;车体垂向振动加速度功率谱密度幅值在19 Hz左右处最大,说明路面激励是影响车体垂向振动的主要因素。
2)利用均方根值定量分析了行驶速度、路面等级对履带机器人车体及支重轮垂向振动的影响。结果表明,随着行驶速度和路面不平度的提高,车体质心的垂向振动加速度近似呈线性增大;由于支重轮5位于履带的驱动段,履带与主动轮啮合产生的多边形效应使得支重轮5的垂向振动加速度略大于支重轮1,3,由此说明靠近驱动段的支重轮与悬挂系统的运行环境较恶劣。
参考文献
View Option
[2]
[本文引用: 1]
MA X G LI F G YOU X M Equivalent method of suspension system and the establishing of plane mathematical modeling of tracked vehicle
[J]. Journal of Mechanical Engineering , 2015 , 51 (18 ): 143 -150 .
DOI:10.3901/jme.2015.18.143
[本文引用: 1]
[4]
ATA W G OYADIJI S O An investigation into the effect of suspension configurations on the performance of tracked vehicles traversing bump terrains
[J]. Vehicle System Dynamics , 2014 , 52 (7 ): 969 -991 .
[本文引用: 1]
[5]
MIAO Y WANG G RUI X Dynamics modeling, simulation, and optimization of vibration characteristics of the tracked vehicle system
[J]. Journal of Vibration and Control , 2021 , 27 : 2451 -2465 .
[本文引用: 1]
[7]
张新 ,王亚飞 ,秦强 ,等 履带式矿用挖装机负重轮仿真研究
[J].煤矿机械 ,2021 ,42 (12 ):34 -37 .
[本文引用: 1]
ZHANG X WANG Y F QIN Q et al Simulation research on load-bearing wheel of crawler mining excavator
[J]. Coal Mine Machinery , 2021 , 42 (12 ): 34 -37 .
[本文引用: 1]
[8]
LI Y L TANG C Research on coupled dynamic model of tracked vehicles and its solving method
[J]. Mathematical Problems in Engineering , 2015 , 2015 (1 ): 293125 .
[本文引用: 1]
[9]
孟磊 ,李晓雷 ,邱实 ,等 履带对履带车辆车体振动影响的分析
[J].车辆与动力技术 ,2015 ,140 (4 ):1 -5 ,41 .
[本文引用: 1]
MENG L LI X L QIU S et al Influence analysis of tracks on body vibration for a tracked vehicle
[J]. Vehicle & Power Technology , 2015 , 140 (4 ): 1 -5 , 41 .
[本文引用: 1]
[10]
DCHOI J H LEE H C SHABANA A A Spatial dynamics of multibody tracked vehicles part I: spatial equations of motion
[J]. Vehicle System Dynamics , 1998 , 29 (1 ): 27 -49 .
[本文引用: 1]
[11]
[本文引用: 1]
QIAO X Y JIN Y DUAN Y Tracked vehicle vibration response analysis based on power spectrum method in consideration of the influence of track circuit
[J]. Journal of Vibration and Shock , 2021 , 40 (18 ): 94 -101 .
DOI:10.13465/j.cnki.jvs.2021.18.013
[本文引用: 1]
[14]
BANERJEE S BALAMURUGAN V KRISHNAKUMAR R Ride dynamics mathematical model for a single station representation of tracked vehicle
[J]. Journal of Terramechanics , 2014 , 53 (6 ): 47 -58 .
[本文引用: 1]
[15]
[本文引用: 1]
YIN J CHEN X B WU L X et al Simulation method of road excitation in time domain using filtered white noise and dynamic analysis of suspension
[J]. Journal of Tongji University (Natural Science) , 2017 , 45 (3 ): 398 -407 .
DOI:10.11908/j.issn.0253-374x.2017.03.014
[本文引用: 1]
[16]
MITSCHKE M WALLENTOWITZ H 汽车动力学 [M]. 5版 .陈荫三,余强,译.北京 :清华大学出版社 ,2019 .
[本文引用: 1]
MITSCHKE M WALLENTOWITZ H Dynamics of motor vehicles [M]. 5th ed .Translated by CHEN Y S,YU Q. Beijing : Tsinghua University Press , 2019 .
[本文引用: 1]
[17]
丁法乾 履带式装甲车辆悬挂系统动力学 [M].北京 :国防工业出版社 ,2004 :49 -57 .
[本文引用: 3]
DING F Q Dynamics of tracked armored vehicle suspension system [M]. Beijing : National Defense Industry Press , 2004 : 49 -57 .
[本文引用: 3]
[18]
刘国辉 ,郝称意 ,李民赞 ,等 半主动悬架山地拖拉机姿态控制系统设计与仿真
[J].农业机械学报 ,2022 ,53 ():338 -348 .
[本文引用: 1]
LIU G H HAO C Y LI M Z et al Attitude control simulation of mountain tractor based on semi-active suspension
[J]. Transactions of the Chinese Society for Agricultural Machinery , 2022 , 53 (): 338 -348 .
[本文引用: 1]
[20]
李雨潭 ,李猛钢 ,朱华 煤矿搜救机器人履带式行走机构性能评价体系
[J].工程科学学报 ,2017 ,39 (12 ):1913 -1921 .
[本文引用: 1]
LI Y T LI M G ZHU H Performance evaluation system of the tracked walking mechanism of a coal mine rescue robot
[J]. Chinese Journal of Engineering , 2017 , 39 (12 ): 1913 -1921 .
[本文引用: 1]
路面激励下的履带车辆负重轮动载荷研究
1
2021
... 煤矿井下巷道路面泥泞且凹凸不平,在救援履带机器人行驶过程中,其搭载的精密仪器会受到不同程度的振动影响.因此,研究履带机器人在不同路况下的适应性和振动响应特性具有重要意义.履带机器人所受的振动激励主要来源于地面与履带、履带与支重轮之间的接触碰撞,接触力通过悬挂系统传递到车身,故支重轮所受的激励会直接影响履带机器人的附着性能、牵引性能及行驶安全性[1 ] . ...
路面激励下的履带车辆负重轮动载荷研究
1
2021
... 煤矿井下巷道路面泥泞且凹凸不平,在救援履带机器人行驶过程中,其搭载的精密仪器会受到不同程度的振动影响.因此,研究履带机器人在不同路况下的适应性和振动响应特性具有重要意义.履带机器人所受的振动激励主要来源于地面与履带、履带与支重轮之间的接触碰撞,接触力通过悬挂系统传递到车身,故支重轮所受的激励会直接影响履带机器人的附着性能、牵引性能及行驶安全性[1 ] . ...
履带车辆悬挂系统当量化及车辆平面数学模型建立
1
2015
... 近年来,国内外学者针对履带机器人的平顺性及其振动响应特性做了大量研究.马星国等[2 ] 、赵旗等[3 ] 、Ata等[4 ] 通过建立履带车辆的刚度-质量-阻尼振动模型,探讨了不同路面形态、不同悬架配置对履带车辆平顺性的影响.Miao等[5 ] 基于多体系统传递矩阵法对履带车辆系统的振动特性进行了分析.朱兴高等[6 ] 、张新等[7 ] 采用多体动力学仿真方法,研究了行驶速度、路面不平度和履带板参数对履带机器人动态特性的影响.Li等[8 ] 采用离散方法求解履带车辆的耦合动力学方程,得到了其质心的加速度和驱动链轮的牵引力.孟磊等[9 ] 建立了履带车辆-履带动力学模型和未考虑履带的履带车辆-试验台架动力学模型,探讨了有无履带状态下车辆振动响应的差异.Dchoi等[10 ] 建立了考虑履带影响的履带机器人三维实体模型,分析了履带与刚性地面之间的相互作用以及履带对路面激励的影响.乔新勇等[11 ] 在考虑履带环影响的条件下分析了履带车辆的振动响应,并对基于柔性履带模型与刚性履带模型的仿真结果进行了比较.李春明等[12 ] 建立了履带车辆的纵向-垂向耦合动力学模型,探讨了垂向、俯仰运动对履带车辆机动性的影响规律.上述文献针对履带机器人行驶系统的多体耦合关系以及履带机器人的振动响应特性进行了深入研究,但较少涉及履带机器人支重轮在不同行驶状态下的振动响应研究. ...
履带车辆悬挂系统当量化及车辆平面数学模型建立
1
2015
... 近年来,国内外学者针对履带机器人的平顺性及其振动响应特性做了大量研究.马星国等[2 ] 、赵旗等[3 ] 、Ata等[4 ] 通过建立履带车辆的刚度-质量-阻尼振动模型,探讨了不同路面形态、不同悬架配置对履带车辆平顺性的影响.Miao等[5 ] 基于多体系统传递矩阵法对履带车辆系统的振动特性进行了分析.朱兴高等[6 ] 、张新等[7 ] 采用多体动力学仿真方法,研究了行驶速度、路面不平度和履带板参数对履带机器人动态特性的影响.Li等[8 ] 采用离散方法求解履带车辆的耦合动力学方程,得到了其质心的加速度和驱动链轮的牵引力.孟磊等[9 ] 建立了履带车辆-履带动力学模型和未考虑履带的履带车辆-试验台架动力学模型,探讨了有无履带状态下车辆振动响应的差异.Dchoi等[10 ] 建立了考虑履带影响的履带机器人三维实体模型,分析了履带与刚性地面之间的相互作用以及履带对路面激励的影响.乔新勇等[11 ] 在考虑履带环影响的条件下分析了履带车辆的振动响应,并对基于柔性履带模型与刚性履带模型的仿真结果进行了比较.李春明等[12 ] 建立了履带车辆的纵向-垂向耦合动力学模型,探讨了垂向、俯仰运动对履带车辆机动性的影响规律.上述文献针对履带机器人行驶系统的多体耦合关系以及履带机器人的振动响应特性进行了深入研究,但较少涉及履带机器人支重轮在不同行驶状态下的振动响应研究. ...
路面激励Simulink模型的建立及其应用
1
2018
... 近年来,国内外学者针对履带机器人的平顺性及其振动响应特性做了大量研究.马星国等[2 ] 、赵旗等[3 ] 、Ata等[4 ] 通过建立履带车辆的刚度-质量-阻尼振动模型,探讨了不同路面形态、不同悬架配置对履带车辆平顺性的影响.Miao等[5 ] 基于多体系统传递矩阵法对履带车辆系统的振动特性进行了分析.朱兴高等[6 ] 、张新等[7 ] 采用多体动力学仿真方法,研究了行驶速度、路面不平度和履带板参数对履带机器人动态特性的影响.Li等[8 ] 采用离散方法求解履带车辆的耦合动力学方程,得到了其质心的加速度和驱动链轮的牵引力.孟磊等[9 ] 建立了履带车辆-履带动力学模型和未考虑履带的履带车辆-试验台架动力学模型,探讨了有无履带状态下车辆振动响应的差异.Dchoi等[10 ] 建立了考虑履带影响的履带机器人三维实体模型,分析了履带与刚性地面之间的相互作用以及履带对路面激励的影响.乔新勇等[11 ] 在考虑履带环影响的条件下分析了履带车辆的振动响应,并对基于柔性履带模型与刚性履带模型的仿真结果进行了比较.李春明等[12 ] 建立了履带车辆的纵向-垂向耦合动力学模型,探讨了垂向、俯仰运动对履带车辆机动性的影响规律.上述文献针对履带机器人行驶系统的多体耦合关系以及履带机器人的振动响应特性进行了深入研究,但较少涉及履带机器人支重轮在不同行驶状态下的振动响应研究. ...
路面激励Simulink模型的建立及其应用
1
2018
... 近年来,国内外学者针对履带机器人的平顺性及其振动响应特性做了大量研究.马星国等[2 ] 、赵旗等[3 ] 、Ata等[4 ] 通过建立履带车辆的刚度-质量-阻尼振动模型,探讨了不同路面形态、不同悬架配置对履带车辆平顺性的影响.Miao等[5 ] 基于多体系统传递矩阵法对履带车辆系统的振动特性进行了分析.朱兴高等[6 ] 、张新等[7 ] 采用多体动力学仿真方法,研究了行驶速度、路面不平度和履带板参数对履带机器人动态特性的影响.Li等[8 ] 采用离散方法求解履带车辆的耦合动力学方程,得到了其质心的加速度和驱动链轮的牵引力.孟磊等[9 ] 建立了履带车辆-履带动力学模型和未考虑履带的履带车辆-试验台架动力学模型,探讨了有无履带状态下车辆振动响应的差异.Dchoi等[10 ] 建立了考虑履带影响的履带机器人三维实体模型,分析了履带与刚性地面之间的相互作用以及履带对路面激励的影响.乔新勇等[11 ] 在考虑履带环影响的条件下分析了履带车辆的振动响应,并对基于柔性履带模型与刚性履带模型的仿真结果进行了比较.李春明等[12 ] 建立了履带车辆的纵向-垂向耦合动力学模型,探讨了垂向、俯仰运动对履带车辆机动性的影响规律.上述文献针对履带机器人行驶系统的多体耦合关系以及履带机器人的振动响应特性进行了深入研究,但较少涉及履带机器人支重轮在不同行驶状态下的振动响应研究. ...
An investigation into the effect of suspension configurations on the performance of tracked vehicles traversing bump terrains
1
2014
... 近年来,国内外学者针对履带机器人的平顺性及其振动响应特性做了大量研究.马星国等[2 ] 、赵旗等[3 ] 、Ata等[4 ] 通过建立履带车辆的刚度-质量-阻尼振动模型,探讨了不同路面形态、不同悬架配置对履带车辆平顺性的影响.Miao等[5 ] 基于多体系统传递矩阵法对履带车辆系统的振动特性进行了分析.朱兴高等[6 ] 、张新等[7 ] 采用多体动力学仿真方法,研究了行驶速度、路面不平度和履带板参数对履带机器人动态特性的影响.Li等[8 ] 采用离散方法求解履带车辆的耦合动力学方程,得到了其质心的加速度和驱动链轮的牵引力.孟磊等[9 ] 建立了履带车辆-履带动力学模型和未考虑履带的履带车辆-试验台架动力学模型,探讨了有无履带状态下车辆振动响应的差异.Dchoi等[10 ] 建立了考虑履带影响的履带机器人三维实体模型,分析了履带与刚性地面之间的相互作用以及履带对路面激励的影响.乔新勇等[11 ] 在考虑履带环影响的条件下分析了履带车辆的振动响应,并对基于柔性履带模型与刚性履带模型的仿真结果进行了比较.李春明等[12 ] 建立了履带车辆的纵向-垂向耦合动力学模型,探讨了垂向、俯仰运动对履带车辆机动性的影响规律.上述文献针对履带机器人行驶系统的多体耦合关系以及履带机器人的振动响应特性进行了深入研究,但较少涉及履带机器人支重轮在不同行驶状态下的振动响应研究. ...
Dynamics modeling, simulation, and optimization of vibration characteristics of the tracked vehicle system
1
2021
... 近年来,国内外学者针对履带机器人的平顺性及其振动响应特性做了大量研究.马星国等[2 ] 、赵旗等[3 ] 、Ata等[4 ] 通过建立履带车辆的刚度-质量-阻尼振动模型,探讨了不同路面形态、不同悬架配置对履带车辆平顺性的影响.Miao等[5 ] 基于多体系统传递矩阵法对履带车辆系统的振动特性进行了分析.朱兴高等[6 ] 、张新等[7 ] 采用多体动力学仿真方法,研究了行驶速度、路面不平度和履带板参数对履带机器人动态特性的影响.Li等[8 ] 采用离散方法求解履带车辆的耦合动力学方程,得到了其质心的加速度和驱动链轮的牵引力.孟磊等[9 ] 建立了履带车辆-履带动力学模型和未考虑履带的履带车辆-试验台架动力学模型,探讨了有无履带状态下车辆振动响应的差异.Dchoi等[10 ] 建立了考虑履带影响的履带机器人三维实体模型,分析了履带与刚性地面之间的相互作用以及履带对路面激励的影响.乔新勇等[11 ] 在考虑履带环影响的条件下分析了履带车辆的振动响应,并对基于柔性履带模型与刚性履带模型的仿真结果进行了比较.李春明等[12 ] 建立了履带车辆的纵向-垂向耦合动力学模型,探讨了垂向、俯仰运动对履带车辆机动性的影响规律.上述文献针对履带机器人行驶系统的多体耦合关系以及履带机器人的振动响应特性进行了深入研究,但较少涉及履带机器人支重轮在不同行驶状态下的振动响应研究. ...
履带车辆行驶速度对负重轮动位移的影响
1
2016
... 近年来,国内外学者针对履带机器人的平顺性及其振动响应特性做了大量研究.马星国等[2 ] 、赵旗等[3 ] 、Ata等[4 ] 通过建立履带车辆的刚度-质量-阻尼振动模型,探讨了不同路面形态、不同悬架配置对履带车辆平顺性的影响.Miao等[5 ] 基于多体系统传递矩阵法对履带车辆系统的振动特性进行了分析.朱兴高等[6 ] 、张新等[7 ] 采用多体动力学仿真方法,研究了行驶速度、路面不平度和履带板参数对履带机器人动态特性的影响.Li等[8 ] 采用离散方法求解履带车辆的耦合动力学方程,得到了其质心的加速度和驱动链轮的牵引力.孟磊等[9 ] 建立了履带车辆-履带动力学模型和未考虑履带的履带车辆-试验台架动力学模型,探讨了有无履带状态下车辆振动响应的差异.Dchoi等[10 ] 建立了考虑履带影响的履带机器人三维实体模型,分析了履带与刚性地面之间的相互作用以及履带对路面激励的影响.乔新勇等[11 ] 在考虑履带环影响的条件下分析了履带车辆的振动响应,并对基于柔性履带模型与刚性履带模型的仿真结果进行了比较.李春明等[12 ] 建立了履带车辆的纵向-垂向耦合动力学模型,探讨了垂向、俯仰运动对履带车辆机动性的影响规律.上述文献针对履带机器人行驶系统的多体耦合关系以及履带机器人的振动响应特性进行了深入研究,但较少涉及履带机器人支重轮在不同行驶状态下的振动响应研究. ...
履带车辆行驶速度对负重轮动位移的影响
1
2016
... 近年来,国内外学者针对履带机器人的平顺性及其振动响应特性做了大量研究.马星国等[2 ] 、赵旗等[3 ] 、Ata等[4 ] 通过建立履带车辆的刚度-质量-阻尼振动模型,探讨了不同路面形态、不同悬架配置对履带车辆平顺性的影响.Miao等[5 ] 基于多体系统传递矩阵法对履带车辆系统的振动特性进行了分析.朱兴高等[6 ] 、张新等[7 ] 采用多体动力学仿真方法,研究了行驶速度、路面不平度和履带板参数对履带机器人动态特性的影响.Li等[8 ] 采用离散方法求解履带车辆的耦合动力学方程,得到了其质心的加速度和驱动链轮的牵引力.孟磊等[9 ] 建立了履带车辆-履带动力学模型和未考虑履带的履带车辆-试验台架动力学模型,探讨了有无履带状态下车辆振动响应的差异.Dchoi等[10 ] 建立了考虑履带影响的履带机器人三维实体模型,分析了履带与刚性地面之间的相互作用以及履带对路面激励的影响.乔新勇等[11 ] 在考虑履带环影响的条件下分析了履带车辆的振动响应,并对基于柔性履带模型与刚性履带模型的仿真结果进行了比较.李春明等[12 ] 建立了履带车辆的纵向-垂向耦合动力学模型,探讨了垂向、俯仰运动对履带车辆机动性的影响规律.上述文献针对履带机器人行驶系统的多体耦合关系以及履带机器人的振动响应特性进行了深入研究,但较少涉及履带机器人支重轮在不同行驶状态下的振动响应研究. ...
履带式矿用挖装机负重轮仿真研究
1
2021
... 近年来,国内外学者针对履带机器人的平顺性及其振动响应特性做了大量研究.马星国等[2 ] 、赵旗等[3 ] 、Ata等[4 ] 通过建立履带车辆的刚度-质量-阻尼振动模型,探讨了不同路面形态、不同悬架配置对履带车辆平顺性的影响.Miao等[5 ] 基于多体系统传递矩阵法对履带车辆系统的振动特性进行了分析.朱兴高等[6 ] 、张新等[7 ] 采用多体动力学仿真方法,研究了行驶速度、路面不平度和履带板参数对履带机器人动态特性的影响.Li等[8 ] 采用离散方法求解履带车辆的耦合动力学方程,得到了其质心的加速度和驱动链轮的牵引力.孟磊等[9 ] 建立了履带车辆-履带动力学模型和未考虑履带的履带车辆-试验台架动力学模型,探讨了有无履带状态下车辆振动响应的差异.Dchoi等[10 ] 建立了考虑履带影响的履带机器人三维实体模型,分析了履带与刚性地面之间的相互作用以及履带对路面激励的影响.乔新勇等[11 ] 在考虑履带环影响的条件下分析了履带车辆的振动响应,并对基于柔性履带模型与刚性履带模型的仿真结果进行了比较.李春明等[12 ] 建立了履带车辆的纵向-垂向耦合动力学模型,探讨了垂向、俯仰运动对履带车辆机动性的影响规律.上述文献针对履带机器人行驶系统的多体耦合关系以及履带机器人的振动响应特性进行了深入研究,但较少涉及履带机器人支重轮在不同行驶状态下的振动响应研究. ...
履带式矿用挖装机负重轮仿真研究
1
2021
... 近年来,国内外学者针对履带机器人的平顺性及其振动响应特性做了大量研究.马星国等[2 ] 、赵旗等[3 ] 、Ata等[4 ] 通过建立履带车辆的刚度-质量-阻尼振动模型,探讨了不同路面形态、不同悬架配置对履带车辆平顺性的影响.Miao等[5 ] 基于多体系统传递矩阵法对履带车辆系统的振动特性进行了分析.朱兴高等[6 ] 、张新等[7 ] 采用多体动力学仿真方法,研究了行驶速度、路面不平度和履带板参数对履带机器人动态特性的影响.Li等[8 ] 采用离散方法求解履带车辆的耦合动力学方程,得到了其质心的加速度和驱动链轮的牵引力.孟磊等[9 ] 建立了履带车辆-履带动力学模型和未考虑履带的履带车辆-试验台架动力学模型,探讨了有无履带状态下车辆振动响应的差异.Dchoi等[10 ] 建立了考虑履带影响的履带机器人三维实体模型,分析了履带与刚性地面之间的相互作用以及履带对路面激励的影响.乔新勇等[11 ] 在考虑履带环影响的条件下分析了履带车辆的振动响应,并对基于柔性履带模型与刚性履带模型的仿真结果进行了比较.李春明等[12 ] 建立了履带车辆的纵向-垂向耦合动力学模型,探讨了垂向、俯仰运动对履带车辆机动性的影响规律.上述文献针对履带机器人行驶系统的多体耦合关系以及履带机器人的振动响应特性进行了深入研究,但较少涉及履带机器人支重轮在不同行驶状态下的振动响应研究. ...
Research on coupled dynamic model of tracked vehicles and its solving method
1
2015
... 近年来,国内外学者针对履带机器人的平顺性及其振动响应特性做了大量研究.马星国等[2 ] 、赵旗等[3 ] 、Ata等[4 ] 通过建立履带车辆的刚度-质量-阻尼振动模型,探讨了不同路面形态、不同悬架配置对履带车辆平顺性的影响.Miao等[5 ] 基于多体系统传递矩阵法对履带车辆系统的振动特性进行了分析.朱兴高等[6 ] 、张新等[7 ] 采用多体动力学仿真方法,研究了行驶速度、路面不平度和履带板参数对履带机器人动态特性的影响.Li等[8 ] 采用离散方法求解履带车辆的耦合动力学方程,得到了其质心的加速度和驱动链轮的牵引力.孟磊等[9 ] 建立了履带车辆-履带动力学模型和未考虑履带的履带车辆-试验台架动力学模型,探讨了有无履带状态下车辆振动响应的差异.Dchoi等[10 ] 建立了考虑履带影响的履带机器人三维实体模型,分析了履带与刚性地面之间的相互作用以及履带对路面激励的影响.乔新勇等[11 ] 在考虑履带环影响的条件下分析了履带车辆的振动响应,并对基于柔性履带模型与刚性履带模型的仿真结果进行了比较.李春明等[12 ] 建立了履带车辆的纵向-垂向耦合动力学模型,探讨了垂向、俯仰运动对履带车辆机动性的影响规律.上述文献针对履带机器人行驶系统的多体耦合关系以及履带机器人的振动响应特性进行了深入研究,但较少涉及履带机器人支重轮在不同行驶状态下的振动响应研究. ...
履带对履带车辆车体振动影响的分析
1
2015
... 近年来,国内外学者针对履带机器人的平顺性及其振动响应特性做了大量研究.马星国等[2 ] 、赵旗等[3 ] 、Ata等[4 ] 通过建立履带车辆的刚度-质量-阻尼振动模型,探讨了不同路面形态、不同悬架配置对履带车辆平顺性的影响.Miao等[5 ] 基于多体系统传递矩阵法对履带车辆系统的振动特性进行了分析.朱兴高等[6 ] 、张新等[7 ] 采用多体动力学仿真方法,研究了行驶速度、路面不平度和履带板参数对履带机器人动态特性的影响.Li等[8 ] 采用离散方法求解履带车辆的耦合动力学方程,得到了其质心的加速度和驱动链轮的牵引力.孟磊等[9 ] 建立了履带车辆-履带动力学模型和未考虑履带的履带车辆-试验台架动力学模型,探讨了有无履带状态下车辆振动响应的差异.Dchoi等[10 ] 建立了考虑履带影响的履带机器人三维实体模型,分析了履带与刚性地面之间的相互作用以及履带对路面激励的影响.乔新勇等[11 ] 在考虑履带环影响的条件下分析了履带车辆的振动响应,并对基于柔性履带模型与刚性履带模型的仿真结果进行了比较.李春明等[12 ] 建立了履带车辆的纵向-垂向耦合动力学模型,探讨了垂向、俯仰运动对履带车辆机动性的影响规律.上述文献针对履带机器人行驶系统的多体耦合关系以及履带机器人的振动响应特性进行了深入研究,但较少涉及履带机器人支重轮在不同行驶状态下的振动响应研究. ...
履带对履带车辆车体振动影响的分析
1
2015
... 近年来,国内外学者针对履带机器人的平顺性及其振动响应特性做了大量研究.马星国等[2 ] 、赵旗等[3 ] 、Ata等[4 ] 通过建立履带车辆的刚度-质量-阻尼振动模型,探讨了不同路面形态、不同悬架配置对履带车辆平顺性的影响.Miao等[5 ] 基于多体系统传递矩阵法对履带车辆系统的振动特性进行了分析.朱兴高等[6 ] 、张新等[7 ] 采用多体动力学仿真方法,研究了行驶速度、路面不平度和履带板参数对履带机器人动态特性的影响.Li等[8 ] 采用离散方法求解履带车辆的耦合动力学方程,得到了其质心的加速度和驱动链轮的牵引力.孟磊等[9 ] 建立了履带车辆-履带动力学模型和未考虑履带的履带车辆-试验台架动力学模型,探讨了有无履带状态下车辆振动响应的差异.Dchoi等[10 ] 建立了考虑履带影响的履带机器人三维实体模型,分析了履带与刚性地面之间的相互作用以及履带对路面激励的影响.乔新勇等[11 ] 在考虑履带环影响的条件下分析了履带车辆的振动响应,并对基于柔性履带模型与刚性履带模型的仿真结果进行了比较.李春明等[12 ] 建立了履带车辆的纵向-垂向耦合动力学模型,探讨了垂向、俯仰运动对履带车辆机动性的影响规律.上述文献针对履带机器人行驶系统的多体耦合关系以及履带机器人的振动响应特性进行了深入研究,但较少涉及履带机器人支重轮在不同行驶状态下的振动响应研究. ...
Spatial dynamics of multibody tracked vehicles part I: spatial equations of motion
1
1998
... 近年来,国内外学者针对履带机器人的平顺性及其振动响应特性做了大量研究.马星国等[2 ] 、赵旗等[3 ] 、Ata等[4 ] 通过建立履带车辆的刚度-质量-阻尼振动模型,探讨了不同路面形态、不同悬架配置对履带车辆平顺性的影响.Miao等[5 ] 基于多体系统传递矩阵法对履带车辆系统的振动特性进行了分析.朱兴高等[6 ] 、张新等[7 ] 采用多体动力学仿真方法,研究了行驶速度、路面不平度和履带板参数对履带机器人动态特性的影响.Li等[8 ] 采用离散方法求解履带车辆的耦合动力学方程,得到了其质心的加速度和驱动链轮的牵引力.孟磊等[9 ] 建立了履带车辆-履带动力学模型和未考虑履带的履带车辆-试验台架动力学模型,探讨了有无履带状态下车辆振动响应的差异.Dchoi等[10 ] 建立了考虑履带影响的履带机器人三维实体模型,分析了履带与刚性地面之间的相互作用以及履带对路面激励的影响.乔新勇等[11 ] 在考虑履带环影响的条件下分析了履带车辆的振动响应,并对基于柔性履带模型与刚性履带模型的仿真结果进行了比较.李春明等[12 ] 建立了履带车辆的纵向-垂向耦合动力学模型,探讨了垂向、俯仰运动对履带车辆机动性的影响规律.上述文献针对履带机器人行驶系统的多体耦合关系以及履带机器人的振动响应特性进行了深入研究,但较少涉及履带机器人支重轮在不同行驶状态下的振动响应研究. ...
基于履带环影响和功率谱方法的履带车辆振动响应分析
1
2021
... 近年来,国内外学者针对履带机器人的平顺性及其振动响应特性做了大量研究.马星国等[2 ] 、赵旗等[3 ] 、Ata等[4 ] 通过建立履带车辆的刚度-质量-阻尼振动模型,探讨了不同路面形态、不同悬架配置对履带车辆平顺性的影响.Miao等[5 ] 基于多体系统传递矩阵法对履带车辆系统的振动特性进行了分析.朱兴高等[6 ] 、张新等[7 ] 采用多体动力学仿真方法,研究了行驶速度、路面不平度和履带板参数对履带机器人动态特性的影响.Li等[8 ] 采用离散方法求解履带车辆的耦合动力学方程,得到了其质心的加速度和驱动链轮的牵引力.孟磊等[9 ] 建立了履带车辆-履带动力学模型和未考虑履带的履带车辆-试验台架动力学模型,探讨了有无履带状态下车辆振动响应的差异.Dchoi等[10 ] 建立了考虑履带影响的履带机器人三维实体模型,分析了履带与刚性地面之间的相互作用以及履带对路面激励的影响.乔新勇等[11 ] 在考虑履带环影响的条件下分析了履带车辆的振动响应,并对基于柔性履带模型与刚性履带模型的仿真结果进行了比较.李春明等[12 ] 建立了履带车辆的纵向-垂向耦合动力学模型,探讨了垂向、俯仰运动对履带车辆机动性的影响规律.上述文献针对履带机器人行驶系统的多体耦合关系以及履带机器人的振动响应特性进行了深入研究,但较少涉及履带机器人支重轮在不同行驶状态下的振动响应研究. ...
基于履带环影响和功率谱方法的履带车辆振动响应分析
1
2021
... 近年来,国内外学者针对履带机器人的平顺性及其振动响应特性做了大量研究.马星国等[2 ] 、赵旗等[3 ] 、Ata等[4 ] 通过建立履带车辆的刚度-质量-阻尼振动模型,探讨了不同路面形态、不同悬架配置对履带车辆平顺性的影响.Miao等[5 ] 基于多体系统传递矩阵法对履带车辆系统的振动特性进行了分析.朱兴高等[6 ] 、张新等[7 ] 采用多体动力学仿真方法,研究了行驶速度、路面不平度和履带板参数对履带机器人动态特性的影响.Li等[8 ] 采用离散方法求解履带车辆的耦合动力学方程,得到了其质心的加速度和驱动链轮的牵引力.孟磊等[9 ] 建立了履带车辆-履带动力学模型和未考虑履带的履带车辆-试验台架动力学模型,探讨了有无履带状态下车辆振动响应的差异.Dchoi等[10 ] 建立了考虑履带影响的履带机器人三维实体模型,分析了履带与刚性地面之间的相互作用以及履带对路面激励的影响.乔新勇等[11 ] 在考虑履带环影响的条件下分析了履带车辆的振动响应,并对基于柔性履带模型与刚性履带模型的仿真结果进行了比较.李春明等[12 ] 建立了履带车辆的纵向-垂向耦合动力学模型,探讨了垂向、俯仰运动对履带车辆机动性的影响规律.上述文献针对履带机器人行驶系统的多体耦合关系以及履带机器人的振动响应特性进行了深入研究,但较少涉及履带机器人支重轮在不同行驶状态下的振动响应研究. ...
履带车辆纵向与垂向耦合动力学模型及功率特性
1
2021
... 近年来,国内外学者针对履带机器人的平顺性及其振动响应特性做了大量研究.马星国等[2 ] 、赵旗等[3 ] 、Ata等[4 ] 通过建立履带车辆的刚度-质量-阻尼振动模型,探讨了不同路面形态、不同悬架配置对履带车辆平顺性的影响.Miao等[5 ] 基于多体系统传递矩阵法对履带车辆系统的振动特性进行了分析.朱兴高等[6 ] 、张新等[7 ] 采用多体动力学仿真方法,研究了行驶速度、路面不平度和履带板参数对履带机器人动态特性的影响.Li等[8 ] 采用离散方法求解履带车辆的耦合动力学方程,得到了其质心的加速度和驱动链轮的牵引力.孟磊等[9 ] 建立了履带车辆-履带动力学模型和未考虑履带的履带车辆-试验台架动力学模型,探讨了有无履带状态下车辆振动响应的差异.Dchoi等[10 ] 建立了考虑履带影响的履带机器人三维实体模型,分析了履带与刚性地面之间的相互作用以及履带对路面激励的影响.乔新勇等[11 ] 在考虑履带环影响的条件下分析了履带车辆的振动响应,并对基于柔性履带模型与刚性履带模型的仿真结果进行了比较.李春明等[12 ] 建立了履带车辆的纵向-垂向耦合动力学模型,探讨了垂向、俯仰运动对履带车辆机动性的影响规律.上述文献针对履带机器人行驶系统的多体耦合关系以及履带机器人的振动响应特性进行了深入研究,但较少涉及履带机器人支重轮在不同行驶状态下的振动响应研究. ...
履带车辆纵向与垂向耦合动力学模型及功率特性
1
2021
... 近年来,国内外学者针对履带机器人的平顺性及其振动响应特性做了大量研究.马星国等[2 ] 、赵旗等[3 ] 、Ata等[4 ] 通过建立履带车辆的刚度-质量-阻尼振动模型,探讨了不同路面形态、不同悬架配置对履带车辆平顺性的影响.Miao等[5 ] 基于多体系统传递矩阵法对履带车辆系统的振动特性进行了分析.朱兴高等[6 ] 、张新等[7 ] 采用多体动力学仿真方法,研究了行驶速度、路面不平度和履带板参数对履带机器人动态特性的影响.Li等[8 ] 采用离散方法求解履带车辆的耦合动力学方程,得到了其质心的加速度和驱动链轮的牵引力.孟磊等[9 ] 建立了履带车辆-履带动力学模型和未考虑履带的履带车辆-试验台架动力学模型,探讨了有无履带状态下车辆振动响应的差异.Dchoi等[10 ] 建立了考虑履带影响的履带机器人三维实体模型,分析了履带与刚性地面之间的相互作用以及履带对路面激励的影响.乔新勇等[11 ] 在考虑履带环影响的条件下分析了履带车辆的振动响应,并对基于柔性履带模型与刚性履带模型的仿真结果进行了比较.李春明等[12 ] 建立了履带车辆的纵向-垂向耦合动力学模型,探讨了垂向、俯仰运动对履带车辆机动性的影响规律.上述文献针对履带机器人行驶系统的多体耦合关系以及履带机器人的振动响应特性进行了深入研究,但较少涉及履带机器人支重轮在不同行驶状态下的振动响应研究. ...
某型履带车辆悬挂系统非线性振动特性研究
1
2017
... 悬挂系统连接履带机器人的车体与支重轮,是机器人减振的关键部件,可保证支重轮载荷稳定[13 ] .在履带机器人悬挂系统动力学研究中,常常将单个悬挂系统与支重轮及履带的相互作用简化为质量-刚度-阻尼形式. ...
某型履带车辆悬挂系统非线性振动特性研究
1
2017
... 悬挂系统连接履带机器人的车体与支重轮,是机器人减振的关键部件,可保证支重轮载荷稳定[13 ] .在履带机器人悬挂系统动力学研究中,常常将单个悬挂系统与支重轮及履带的相互作用简化为质量-刚度-阻尼形式. ...
Ride dynamics mathematical model for a single station representation of tracked vehicle
1
2014
... 通过上文分析可知,悬挂系统的等效刚度k e c e Δ α Δ α [14 ] : ...
滤波白噪声路面时域模拟方法与悬架性能仿真
1
2017
... 路面激励作为履带机器人振动系统的输入,其时间功率谱密度除了与空间功率谱密度相关外,还与机器人行驶速度相关[15 ] .鉴于路面激励的功率谱密度在整个频率范围内为常数,其特性与白噪声功率谱特性一致,因此路面激励输入可用白噪声模拟,其时域模型可表示为[16 ] : ...
滤波白噪声路面时域模拟方法与悬架性能仿真
1
2017
... 路面激励作为履带机器人振动系统的输入,其时间功率谱密度除了与空间功率谱密度相关外,还与机器人行驶速度相关[15 ] .鉴于路面激励的功率谱密度在整个频率范围内为常数,其特性与白噪声功率谱特性一致,因此路面激励输入可用白噪声模拟,其时域模型可表示为[16 ] : ...
1
2019
... 路面激励作为履带机器人振动系统的输入,其时间功率谱密度除了与空间功率谱密度相关外,还与机器人行驶速度相关[15 ] .鉴于路面激励的功率谱密度在整个频率范围内为常数,其特性与白噪声功率谱特性一致,因此路面激励输入可用白噪声模拟,其时域模型可表示为[16 ] : ...
1
2019
... 路面激励作为履带机器人振动系统的输入,其时间功率谱密度除了与空间功率谱密度相关外,还与机器人行驶速度相关[15 ] .鉴于路面激励的功率谱密度在整个频率范围内为常数,其特性与白噪声功率谱特性一致,因此路面激励输入可用白噪声模拟,其时域模型可表示为[16 ] : ...
3
2004
... 由于履带滤掉了路面激励中比履带板节距空间频率n T n T = 1 / t T t T t T n T n u [17 ] ,即式(11) 中n u = n T . ...
... 履带机器人是一个复杂的多自由度系统,在保证其动力学模型计算精度和完整性的前提下,作以下假设[17 ] : ...
... 根据过往经验,履带机器人车体俯仰振动加速度的固有频率约为1.1 Hz,垂向振动加速度的固有频率约为1.5 Hz[17 ] .由图7 可以看出,在0~2 Hz频段内,履带机器人在B级路面上以不同速度行驶时,其车体的垂向振动加速度功率谱密度曲线均有峰值.车体垂向振动加速度功率谱密度主要峰值出现在19 Hz左右,该频段为路面不平度所引起的激励频率,由此说明路面激励对车体垂向振动的影响较大,不同行驶速度下对应的垂向振动加速度功率谱密度幅值分别为0.808,1.060,1.188 g 2 /Hz. ...
3
2004
... 由于履带滤掉了路面激励中比履带板节距空间频率n T n T = 1 / t T t T t T n T n u [17 ] ,即式(11) 中n u = n T . ...
... 履带机器人是一个复杂的多自由度系统,在保证其动力学模型计算精度和完整性的前提下,作以下假设[17 ] : ...
... 根据过往经验,履带机器人车体俯仰振动加速度的固有频率约为1.1 Hz,垂向振动加速度的固有频率约为1.5 Hz[17 ] .由图7 可以看出,在0~2 Hz频段内,履带机器人在B级路面上以不同速度行驶时,其车体的垂向振动加速度功率谱密度曲线均有峰值.车体垂向振动加速度功率谱密度主要峰值出现在19 Hz左右,该频段为路面不平度所引起的激励频率,由此说明路面激励对车体垂向振动的影响较大,不同行驶速度下对应的垂向振动加速度功率谱密度幅值分别为0.808,1.060,1.188 g 2 /Hz. ...
半主动悬架山地拖拉机姿态控制系统设计与仿真
1
2022
... 在构建履带机器人的路面激励模型时,还需考虑路面激励作用于各支重轮的延时性.假设每个支重轮所受的路面激励相同,但在履带机器人实际行驶过程中,5个支重轮依次通过不平路面,即路面激励对每个支重轮的作用时间不同[18 ] .因此,在模拟路面激励时,应根据履带机器人的行驶速度以及支重轮之间的相对距离,对加载在各支重轮上的路面激励设置时间差,以更好地模拟路面激励对履带机器人行驶平顺性的影响.图4 所示为B级路面下履带机器人行驶速度为1 m/s时,最终作用于单侧5个支重轮上的路面激励. ...
半主动悬架山地拖拉机姿态控制系统设计与仿真
1
2022
... 在构建履带机器人的路面激励模型时,还需考虑路面激励作用于各支重轮的延时性.假设每个支重轮所受的路面激励相同,但在履带机器人实际行驶过程中,5个支重轮依次通过不平路面,即路面激励对每个支重轮的作用时间不同[18 ] .因此,在模拟路面激励时,应根据履带机器人的行驶速度以及支重轮之间的相对距离,对加载在各支重轮上的路面激励设置时间差,以更好地模拟路面激励对履带机器人行驶平顺性的影响.图4 所示为B级路面下履带机器人行驶速度为1 m/s时,最终作用于单侧5个支重轮上的路面激励. ...
MATLAB实现ADAMS三维随机路面建模
1
2018
... 为使仿真模型与理论模型的路面激励输入一致,将路面激励理论模型转化为多体动力学软件可识别的三维实体模型.采用三维等效容积法建立三维路面模型.将B级、D级、E级路面的不平度作为三维路面模型的z 坐标,路面的宽度和长度分别为y 、x 坐标,利用MATLAB软件编程生成各个节点的三维坐标,并转换成含有节点向量矩阵与单元向量矩阵的文件[19 ] ,然后导入rdf格式的路面文件,生成可被多体动力学软件识别的三维路面模型. ...
MATLAB实现ADAMS三维随机路面建模
1
2018
... 为使仿真模型与理论模型的路面激励输入一致,将路面激励理论模型转化为多体动力学软件可识别的三维实体模型.采用三维等效容积法建立三维路面模型.将B级、D级、E级路面的不平度作为三维路面模型的z 坐标,路面的宽度和长度分别为y 、x 坐标,利用MATLAB软件编程生成各个节点的三维坐标,并转换成含有节点向量矩阵与单元向量矩阵的文件[19 ] ,然后导入rdf格式的路面文件,生成可被多体动力学软件识别的三维路面模型. ...
煤矿搜救机器人履带式行走机构性能评价体系
1
2017
... 为分析行驶速度对履带机器人车体及支重轮振动响应的影响[20 ] ,通过动力学仿真分析得到履带机器人在B级路面上以0.5,1.0,1.5 m/s速度行驶时,其车体(质心处,下文同)的垂向振动加速度功率谱密度,如图7 所示. ...
煤矿搜救机器人履带式行走机构性能评价体系
1
2017
... 为分析行驶速度对履带机器人车体及支重轮振动响应的影响[20 ] ,通过动力学仿真分析得到履带机器人在B级路面上以0.5,1.0,1.5 m/s速度行驶时,其车体(质心处,下文同)的垂向振动加速度功率谱密度,如图7 所示. ...







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}