基于支重轮-履带-地面多体耦合的履带机器人振动响应研究
Study on vibration response of tracked robot based on multi-body coupling of supporting wheel-track-ground
基于支重轮-履带-地面多体耦合的履带机器人振动响应研究 |
| 宋佳琪,张宏,王景宇,殷国珠 |
|
Study on vibration response of tracked robot based on multi-body coupling of supporting wheel-track-ground |
| Jiaqi SONG,Hong ZHANG,Jingyu WANG,Guozhu YIN |
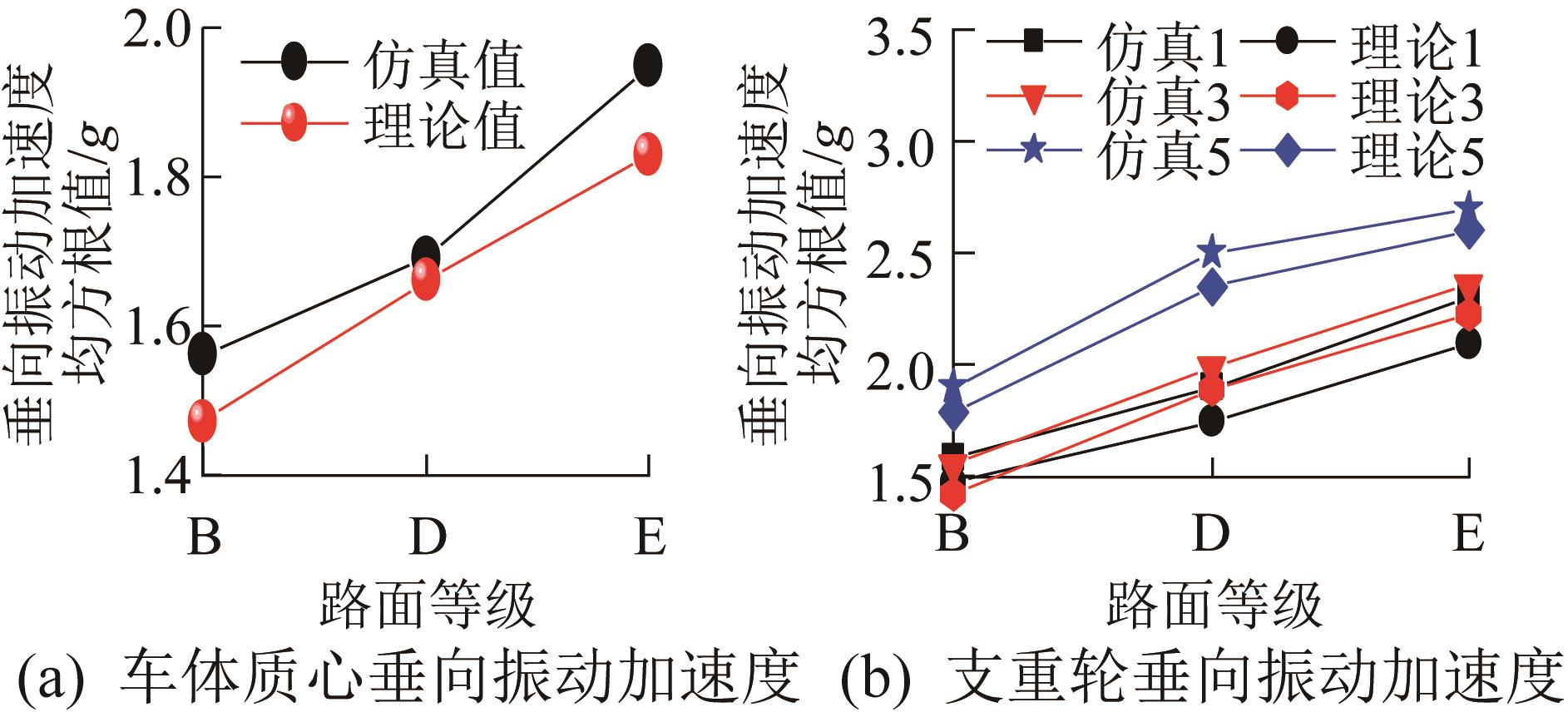
| 图10 路面等级对履带机器人车体及支重轮垂向振动的影响 |
| Fig.10 Influence of road grade on vertical vibration of tracked robot body and supporting wheel |
|
|