| Optimization Design |
|

|
|
|
| Multi-objective trajectory optimization method for manipulator based on improved sparrow search algorithm |
Ling LI1,2( ),Yulong HOU1,2,Yao LI1,2,Dan LUO1,Miaoxia XIE1 ),Yulong HOU1,2,Yao LI1,2,Dan LUO1,Miaoxia XIE1 |
1.School of Mechanical and Electrical Engineering, Xi'an University of Architecture and Technology, Xi'an 710055, China
2.Xi'an Key Laboratory of Intelligent Technology for Heavy Machinery Equipment, Xi'an 710311, China |
|
|
|
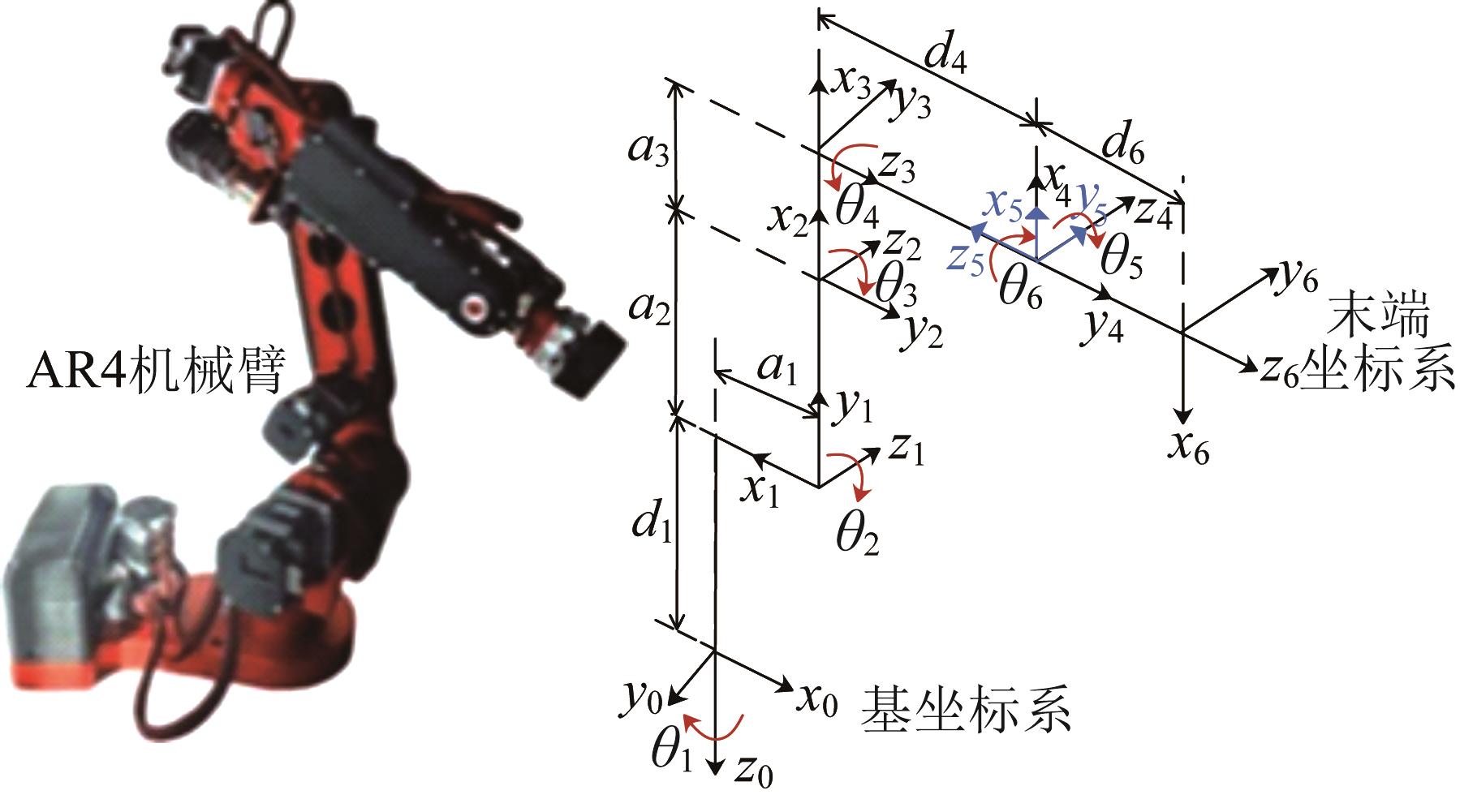
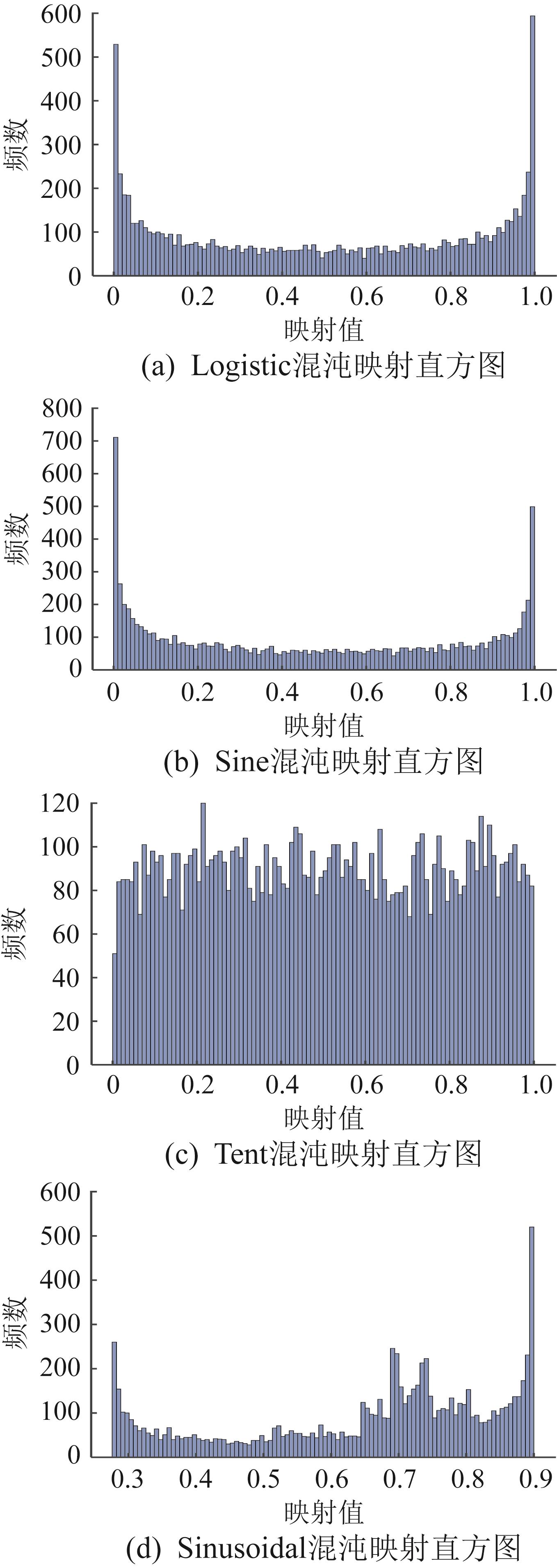
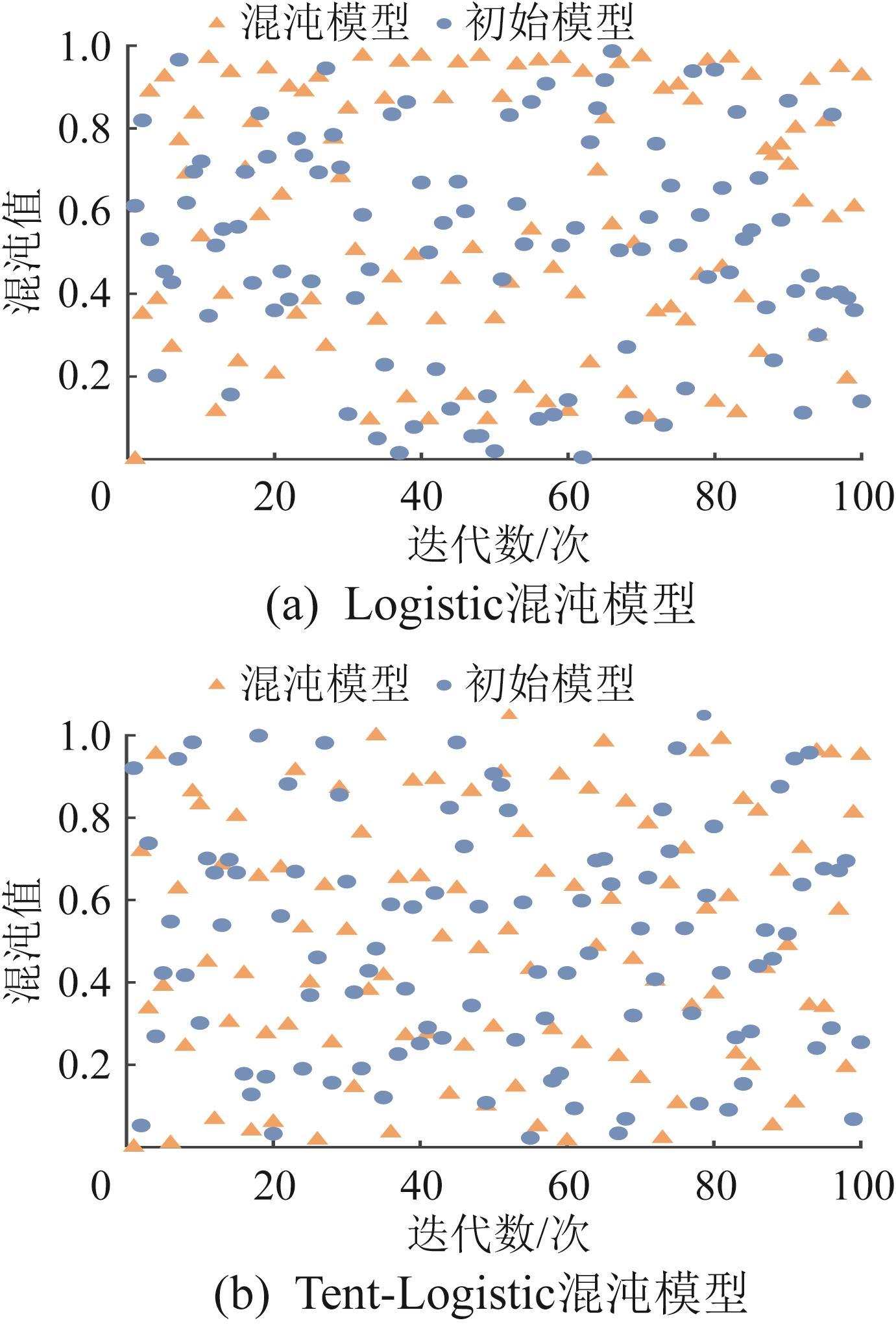
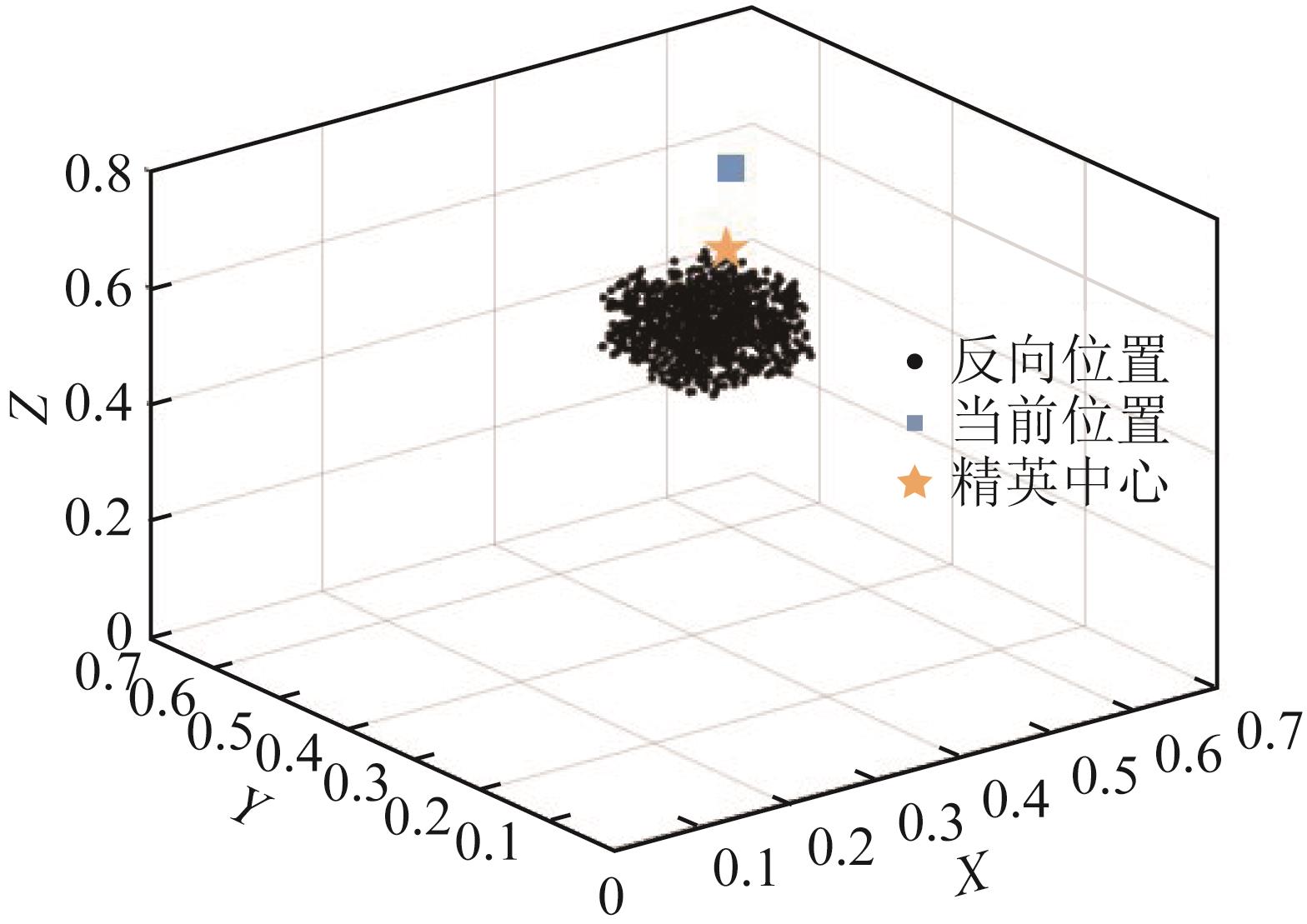
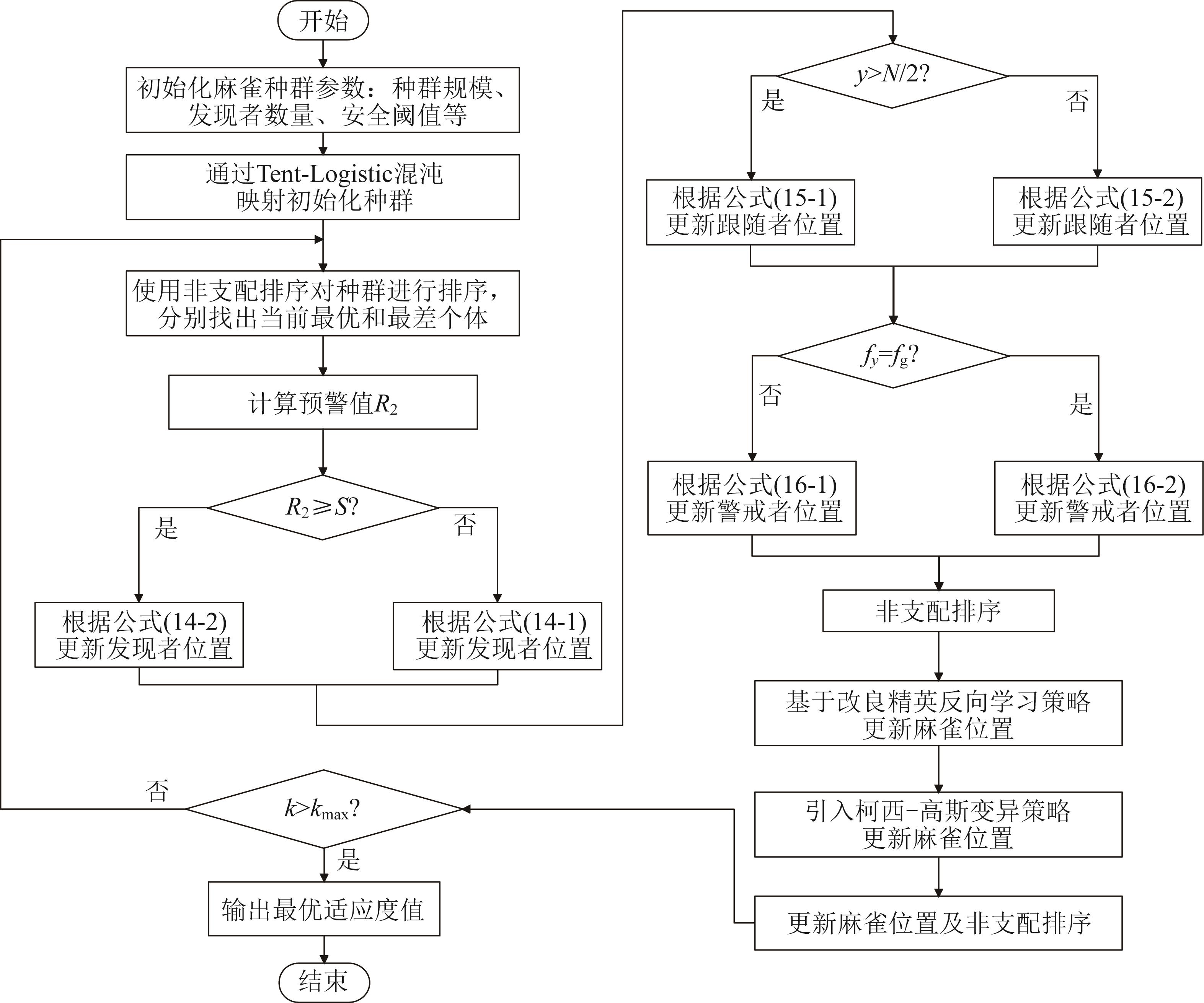
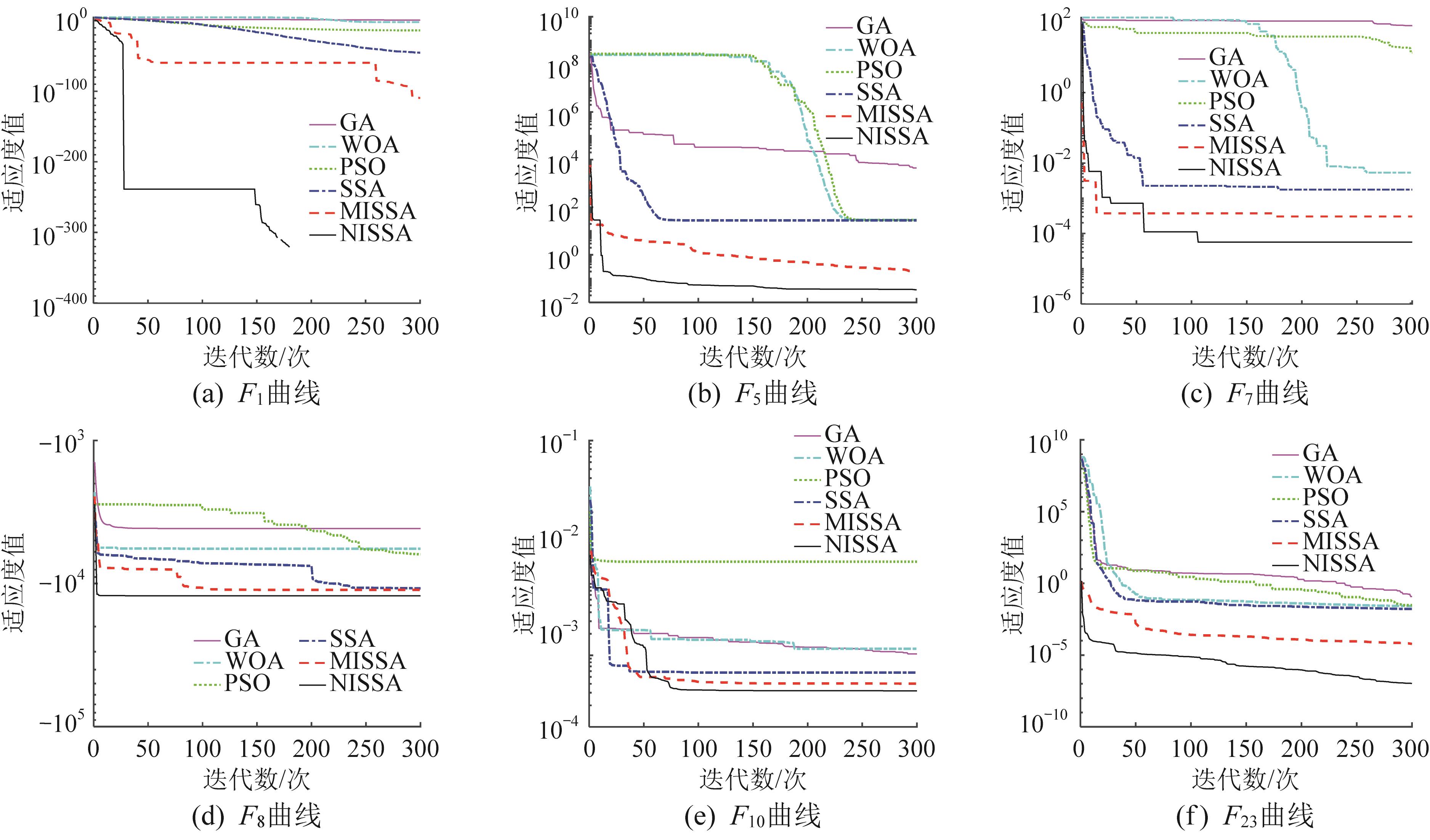
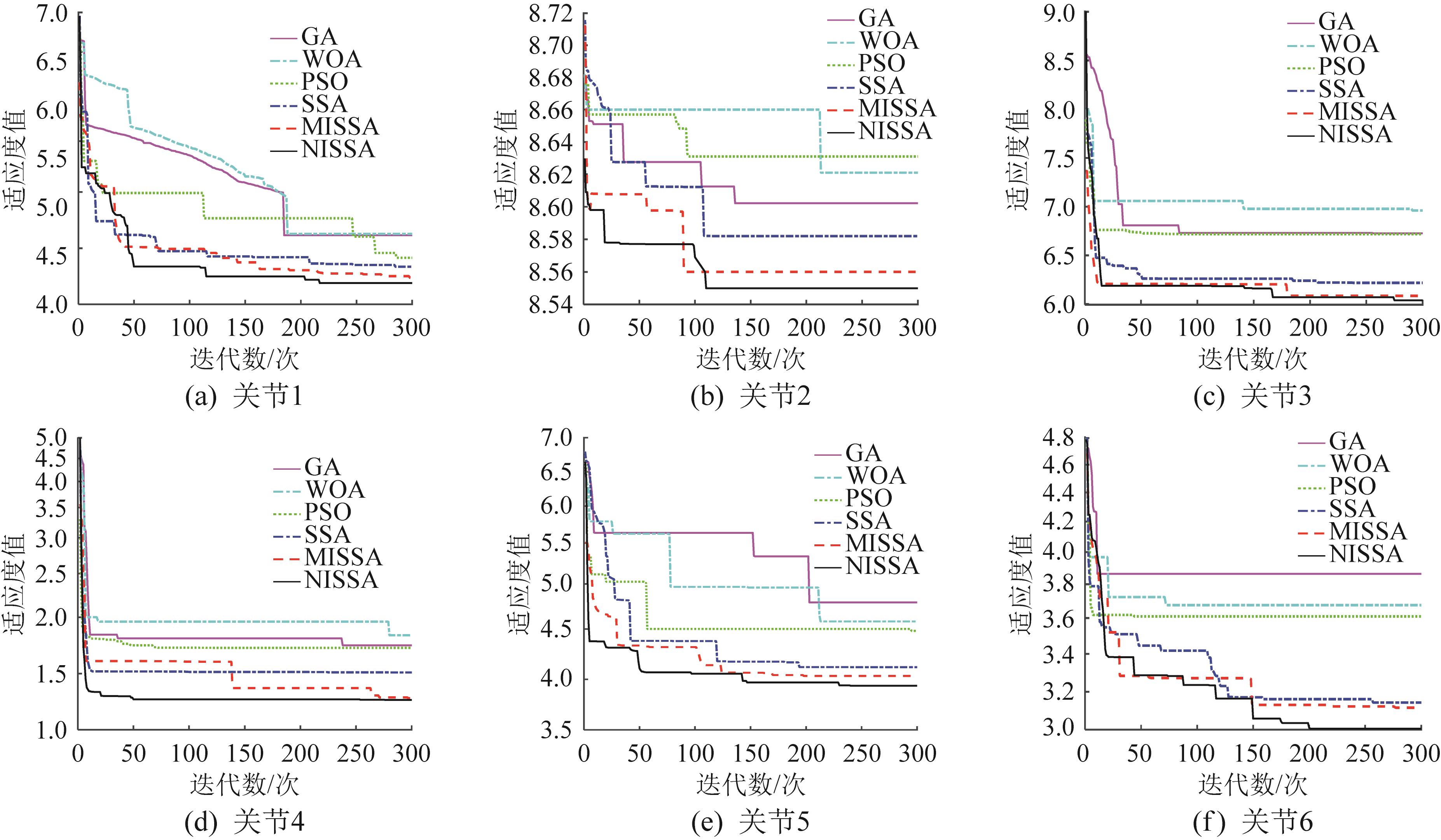
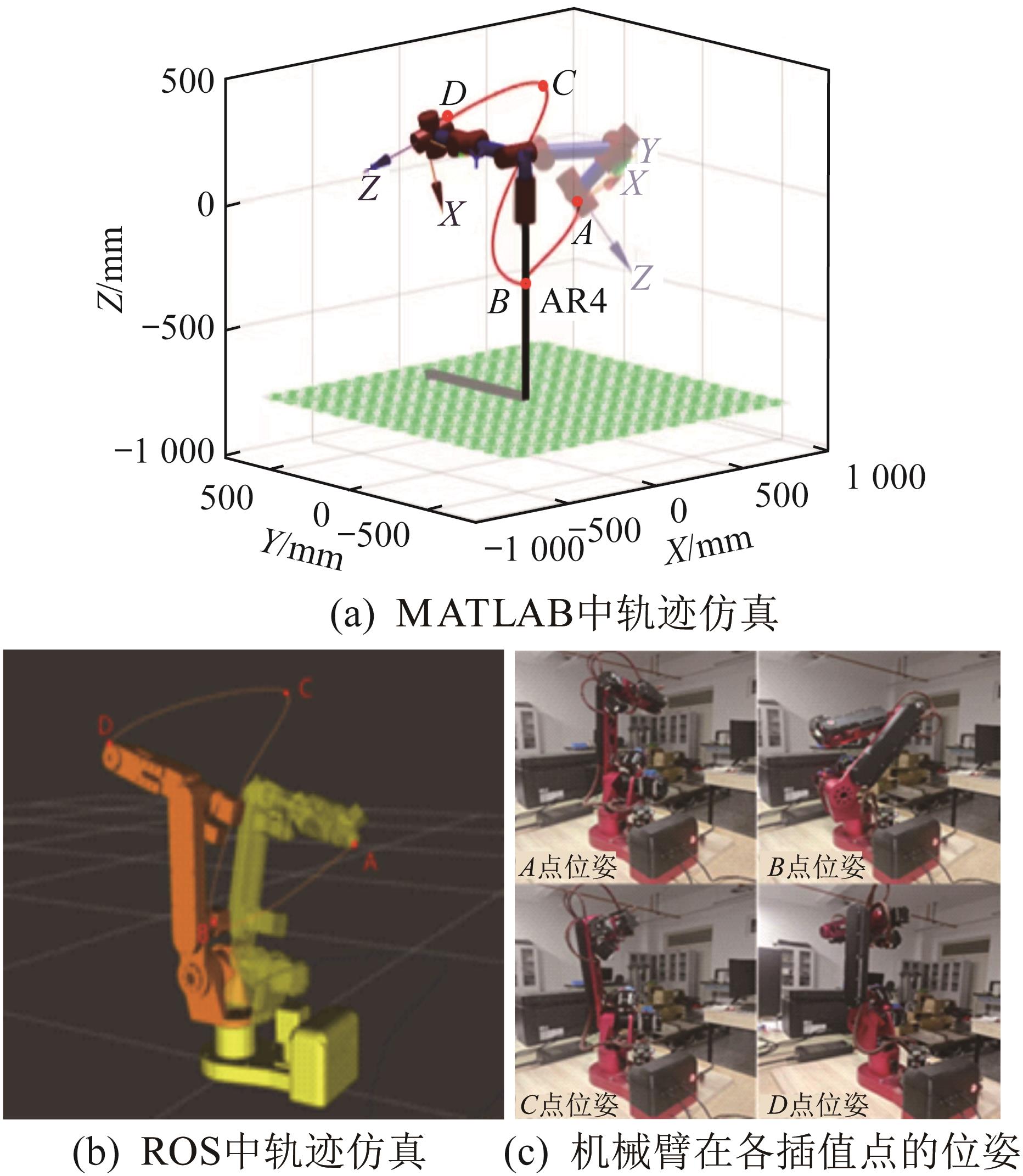
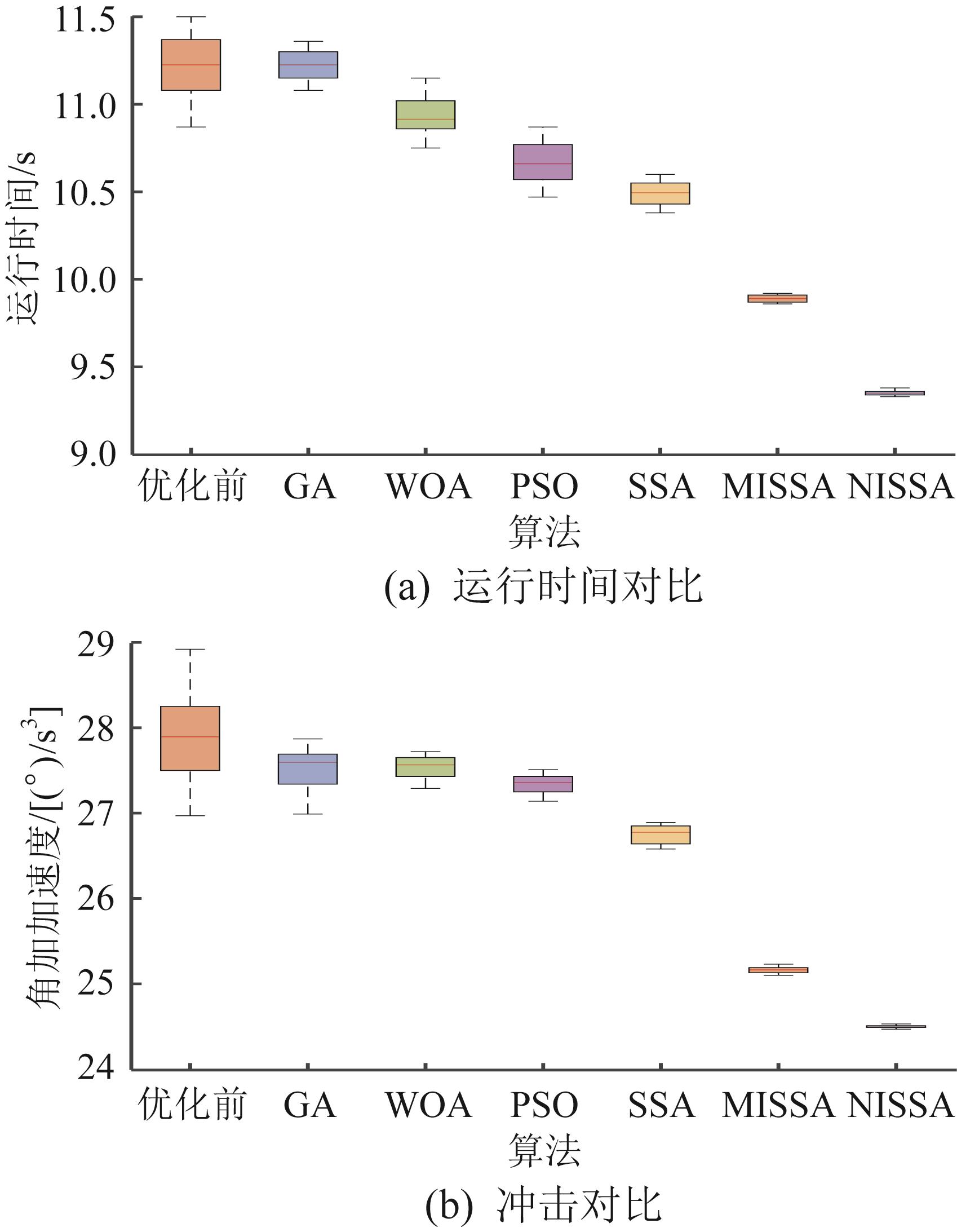
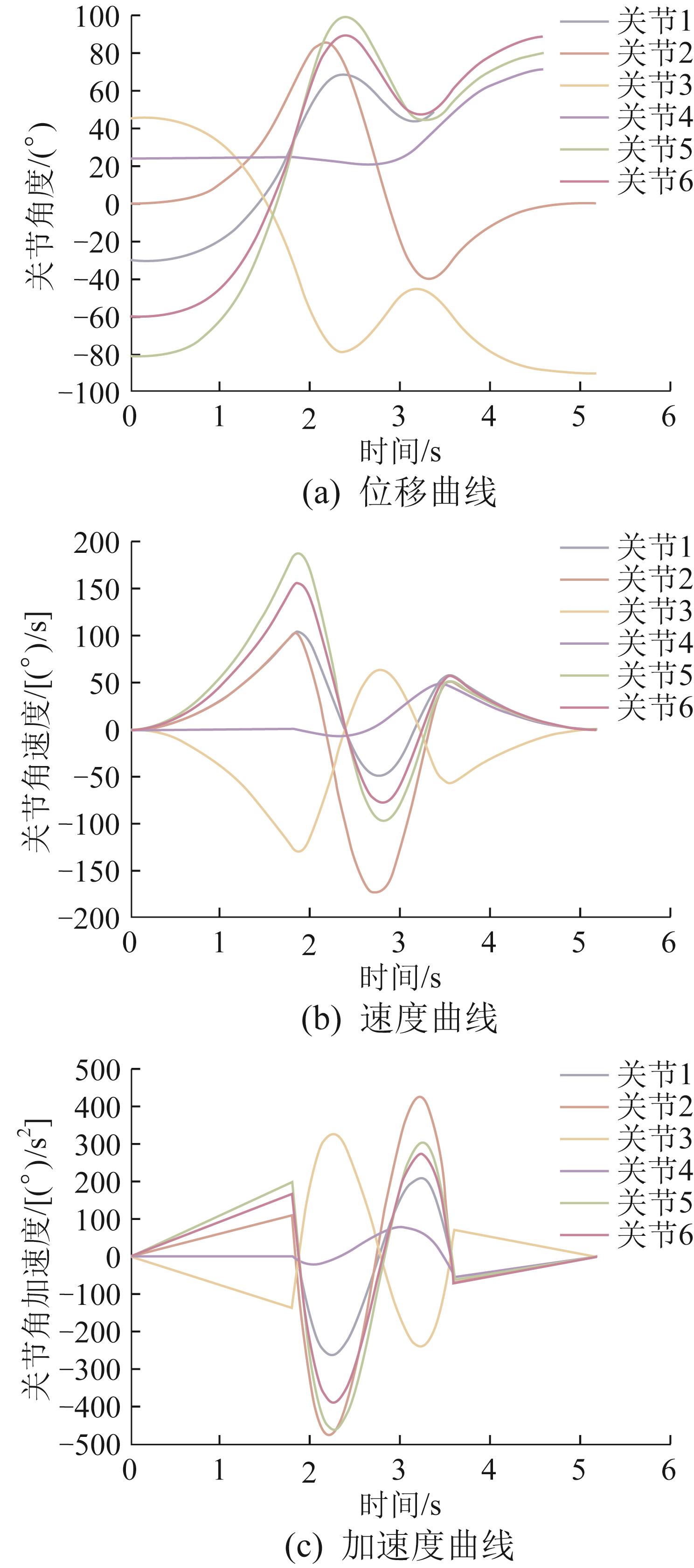
Abstract Aiming at the problems such as low operational efficiency and mechanical fatigue damage caused by impact and vibration in traditional manipulators during task execution, a multi-objective trajectory optimization method based on an improved sparrow search algorithm (SSA) is proposed. Taking the six-degree-of-freedom AR4 manipulator as the research object, its kinematic model was constructed by using the segmented 3-5-3 polynomial interpolation method. Then, based on the newly improved SSA (NISSA) that integrated Tent-Logistic chaotic mapping, improved elite opposition-based learning strategy and Cauchy-Gaussian mutation strategy, the multi-objective collaborative optimization was carried out for the operation time and impact of each joint of the manipulator. Finally, comparative experiments were conducted with other optimization algorithms to verify the effectiveness of NISSA. The experimental results showed that after optimization with NISSA, the operation time of the manipulator was shortened by 17.8%, and the impact generated during operation was reduced by 12.9%. The research results provide an efficient method for the trajectory optimization of manipulators.
|
|
Received: 10 March 2025
Published: 31 October 2025
|
|
|
基于改进麻雀搜索算法的机械臂多目标轨迹优化方法
针对传统机械臂在执行任务时存在工作效率低,以及易产生冲击和振动而造成机械疲劳损坏等问题,提出了一种基于改进麻雀搜索算法(sparrow search algorithm, SSA)的机械臂多目标轨迹优化方法。以六自由度AR4机械臂为研究对象,采用分段式3-5-3多项式插值法构建其运动学模型。然后,基于融合Tent-Logistic混沌映射、改良精英反向学习策略及柯西-高斯变异策略的新型改进SSA(newly improved SSA, NISSA),对机械臂各关节的运行时间和冲击进行多目标协同优化。最后,与其他优化算法进行对比实验,以验证NISSA的有效性。实验结果表明,应用NISSA优化后,机械臂的运行时间缩短了17.8%,运行中产生的冲击减小了12.9%。研究结果为机械臂的轨迹优化提供了高效的方法。
关键词:
机械臂,
轨迹优化,
麻雀搜索算法,
Tent-Logistic混沌映射,
精英反向学习策略
|
|
| [[8]] |
WU J C, ZHANG Z W, YANG Y D, et al. Time optimal trajectory planning of robotic arm based on improved tuna swarm algorithm[J]. Computer Integrated Manufacturing Systems, 2024, 30(12): 4292-4301.
|
|
|
| [[9]] |
XUE J K, SHEN B. A novel swarm intelligence optimization approach: sparrow search algorithm[J]. Systems Science & Control Engineering, 2020, 8(1): 22-34.
|
|
|
| [[10]] |
吕鑫, 慕晓冬, 张钧, 等. 混沌麻雀搜索优化算法[J]. 北京航空航天大学学报, 2021, 47(8): 1712-1720.
LÜ X, MU X D, ZHANG J, et al. Chaos sparrow search optimization algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(8): 1712-1720.
|
|
|
| [[11]] |
邱冰, 李小兵, 石志新, 等. 多策略改进麻雀算法在机械臂时间最优轨迹规划中的应用[J]. 机械科学与技术, 2024, 43(10): 1714-1722.
QIU B, LI X B, SHI Z X, et al. Application of multi-strategy improved sparrow algorithm in time optimal trajectory planning of manipulator[J]. Mechanical Science and Technology for Aerospace Engineering, 2024, 43(10): 1714-1722.
|
|
|
| [[12]] |
季海涛, 靳华伟. 多策略改进型麻雀算法在水下伸缩臂轨迹定位的应用[J]. 机床与液压, 2023, 51(15): 50-56.
JI H T, JIN H W. Application of multi-strategy improved sparrow algorithm in trajectory location of underwater telescopic boom[J]. Machine Tool & Hydraulics, 2023, 51(15): 50-56.
|
|
|
| [[13]] |
LIU J, ZHU H T, CHEN Y, et al. Path following of an underwater snake-like robot exposed to ocean currents and locomotion efficiency optimization based on multi-strategy improved sparrow search algorithm[J]. Journal of Marine Science and Engineering, 2023, 11(6): 1236.
|
|
|
| [[14]] |
顾清华, 姜秉佼, 常朝朝, 等. 求解大规模优化问题的改进麻雀搜索算法[J]. 控制与决策, 2023, 38(7): 1960-1968.
GU Q H, JIANG B J, CHANG Z Z, et al. An improved sparrow search algorithm for solving large-scale optimization problems[J]. Control and Decision, 2023, 38(7): 1960-1968.
|
|
|
| [[15]] |
李昕燃, 靳伍银. 基于改进麻雀算法优化支持向量机的滚动轴承故障诊断研究[J]. 振动与冲击, 2023, 42(6): 106-114.
|
|
|
| [[1]] |
陆一, 王萍, 李书福, 等. 传统制造必须向智能制造转变[J]. 中国质量监管, 2016(10): 70-71.
LU Y, WANG P, LI S F, et al. Traditional manufacturing must be transformed into intelligent manufacturing[J]. China Quality Supervision, 2016(10): 70-71.
|
|
|
| [[15]] |
LI X R, JIN W Y. Fault diagnosis of rolling bearings based on ISSA-SVM[J]. Journal of Vibration and Shock, 2023, 42(6): 106-114.
|
|
|
| [[16]] |
何康佳, 何玲, 冯磊, 等. 六轴机器人的运动学建模与轨迹规划研究[J]. 机床与液压, 2020, 48(12): 171-176, 183.
HE K J, HE L, FENG L, et al. Research on kinematic modeling and trajectory planning of six-axis robot[J]. Machine Tool & Hydraulics, 2020, 48(12): 171-176, 183.
|
|
|
| [[17]] |
郭锐, 石月, 李永涛, 等. 液压凿岩机器人机械臂轨迹规划研究[J]. 中国工程机械学报, 2021, 19(4): 289-294.
GUO R, SHI Y, LI Y T, et al. Research on trajectory planning of hydraulic rock drilling robot manipulator[J]. Chinese Journal of Construction Machinery, 2021, 19(4): 289-294.
|
|
|
| [[18]] |
GUPTA S, DEEP K. A hybrid self-adaptive sine cosine algorithm with opposition based learning[J]. Expert Systems with Applications, 2019, 119: 210-230.
|
|
|
| [[19]] |
郭文艳, 王远, 戴芳, 等. 基于精英混沌搜索策略的交替正余弦算法[J]. 控制与决策, 2019, 34(8): 1654-1662.
GUO W Y, WANG Y, DAI F, et al. Alternating sine cosine algorithm based on elite chaotic search strategy[J]. Control and Decision, 2019, 34(8): 1654-1662.
|
|
|
| [[20]] |
GHAREHCHOPOGH F S, NAMAZI M, EBRAHIMI L, et al. Advances in sparrow search algorithm: a comprehensive survey[J]. Archives of Computational Methods in Engineering, 2023, 30(1): 427-455.
|
|
|
| [[21]] |
WANG W C, XU L, CHAU K W, et al. Yin-yang firefly algorithm based on dimensionally Cauchy mutation[J]. Expert Systems with Applications, 2020, 150: 113216.
|
|
|
| [[22]] |
DUAN J H, GONG Y P, LUO J, et al. Air-quality prediction based on the ARIMA-CNN-LSTM combination model optimized by dung beetle optimizer[J]. Scientific Reports, 2023, 13(1): 12127.
|
|
|
| [[2]] |
白克强. 双臂机器人拟人化动作实现与协调控制方法研究[D]. 合肥: 中国科学技术大学, 2017.
BAI K Q. Research on human-like arm motion generation and cooperation control method for humanoid dual-arm robots[D]. Hefei: University of Science and Technology of China, 2017.
|
|
|
| [[3]] |
董理, 杨东, 鹿建森. 工业机器人轨迹规划方法综述[J]. 控制工程, 2022, 29(12): 2365-2374.
DONG L, YANG D, LU J S. Trajectory planning methods for industrial robots: a review[J]. Control Engineering of China, 2022, 29(12): 2365-2374.
|
|
|
| [[4]] |
朱战霞, 靖飒, 仲剑飞, 等. 基于碰撞检测的空间冗余机械臂避障路径规划[J]. 西北工业大学学报, 2020, 38(1): 183-190. doi:10.1051/jnwpu/20203810183
ZHU Z X, JING S, ZHONG J F, et al. Obstacle avoidance path planning of space redundant manipulator based on a collision detection algorithm[J]. Journal of Northwestern Polytechnical University, 2020, 38(1): 183-190.
doi: 10.1051/jnwpu/20203810183
|
|
|
| [[5]] |
蔡永超. 机械臂关节空间轨迹的时间最优智能规划研究[J]. 机械设计与制造, 2020(3): 272-276.
CAI Y C. Mechanical arm trajectory optimal time intelligent planning in the joint space[J]. Machinery Design & Manufacture, 2020(3): 272-276.
|
|
|
| [[6]] |
孙颙琰, 郭文勇, 孙云岭, 等. 基于自适应变换蝙蝠算法的机械臂轨迹优化[J]. 机械传动, 2022, 46(5): 35-41.
SUN Y Y, GUO W Y, SUN Y L, et al. Trajectory optimization of manipulator based on adaptive transformation bat algorithm[J]. Journal of Mechanical Transmission, 2022, 46(5): 35-41.
|
|
|
| [[7]] |
谢嘉, 吴家桢, 李永国, 等. 改进粒子群优化算法在机械臂轨迹规划中的应用[J]. 机械科学与技术, 2024, 43(10): 1681-1686.
XIE J, WU J Z, LI Y G, et al. Applying improved particle swarm optimization algorithm to trajectory planning of manipulator[J]. Mechanical Science and Technology for Aerospace Engineering, 2024, 43(10): 1681-1686.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|