| Reliability and Quality Design |
|

|
|
|
| Design and parameter optimization of permanent magnet wheel based on reliable and stable adhesion of bilateral Halbach arrays |
Bingsheng LU1( ),Donglin TANG1(),Yuanyao HU1,Jianbo CHE1,Yuanyuan HE1,2 ),Donglin TANG1(),Yuanyao HU1,Jianbo CHE1,Yuanyuan HE1,2 |
1.School of Mechanical and Electrical Engineering, Southwest Petroleum University, Chengdu 610500, China
2.Sichuan Special Equipment Inspection Institute, Chengdu 610000, China |
|
|
|
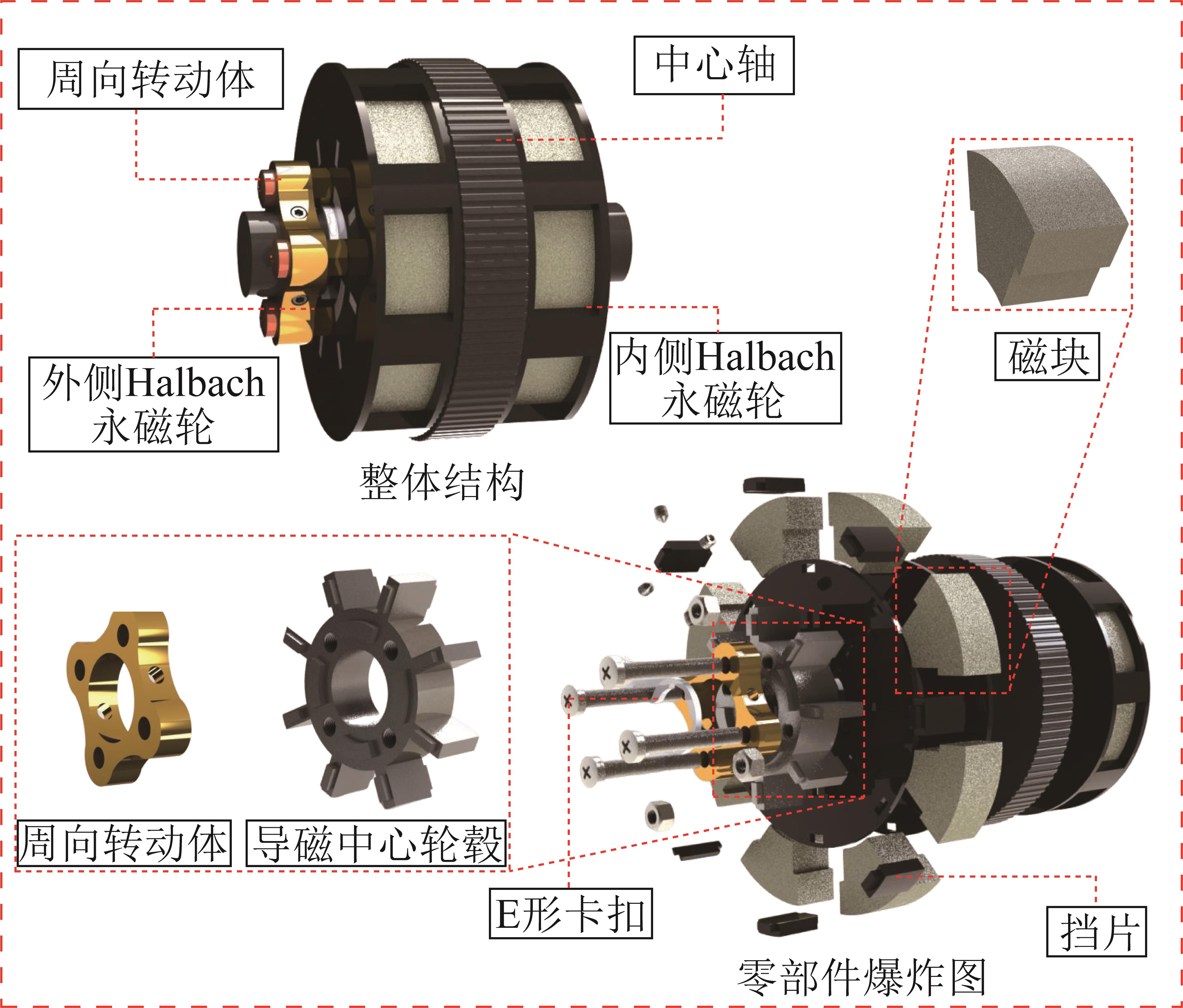
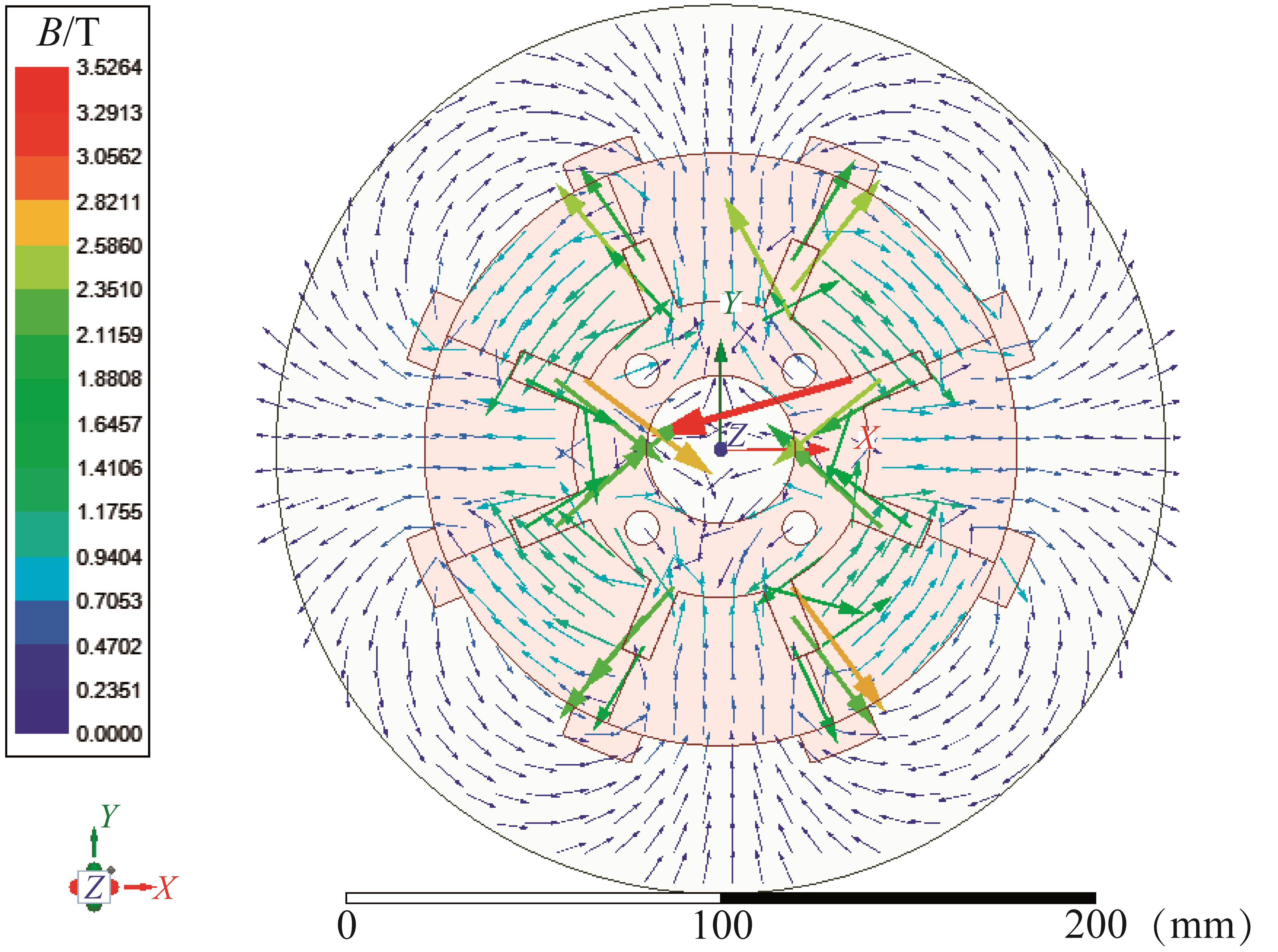
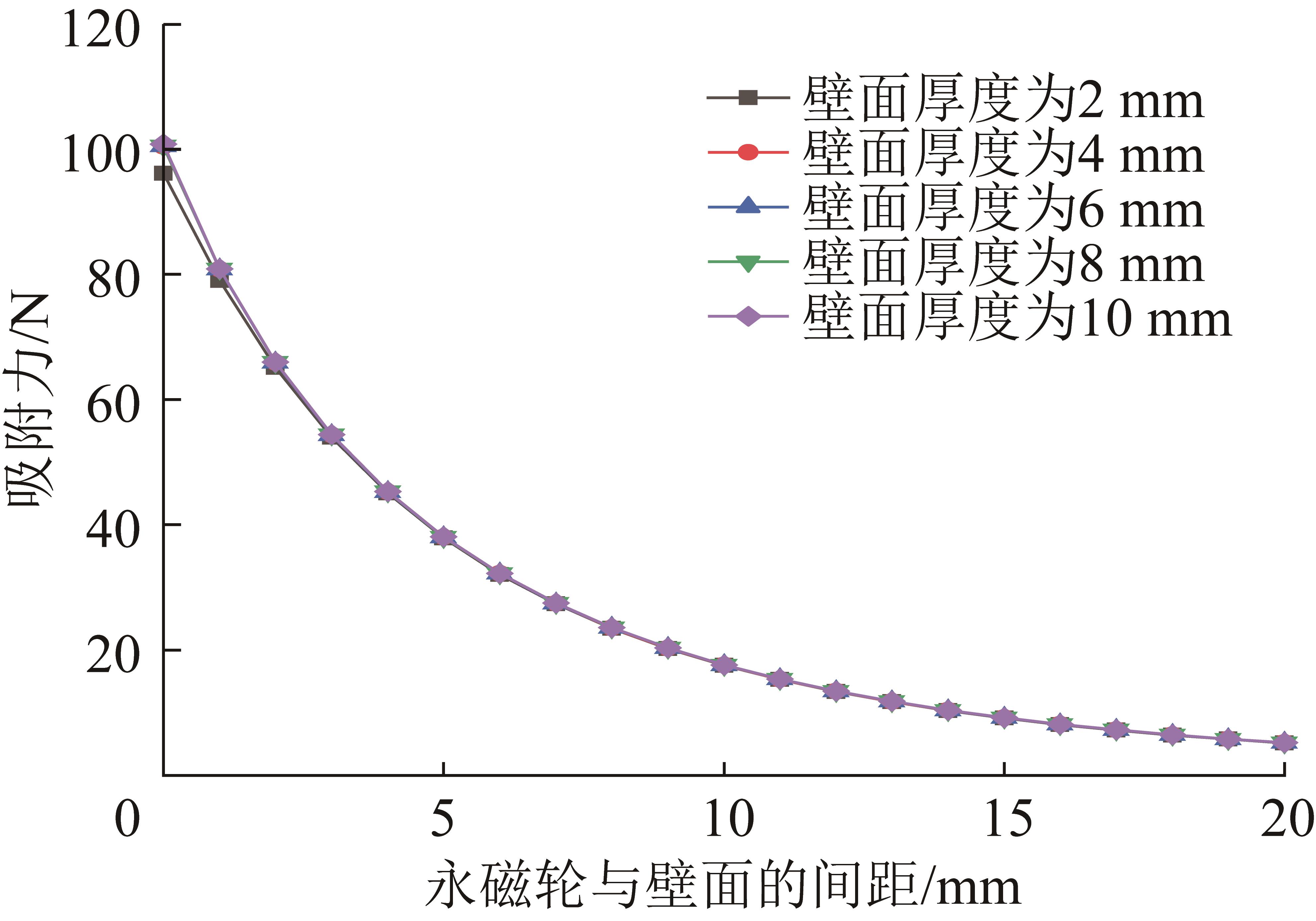
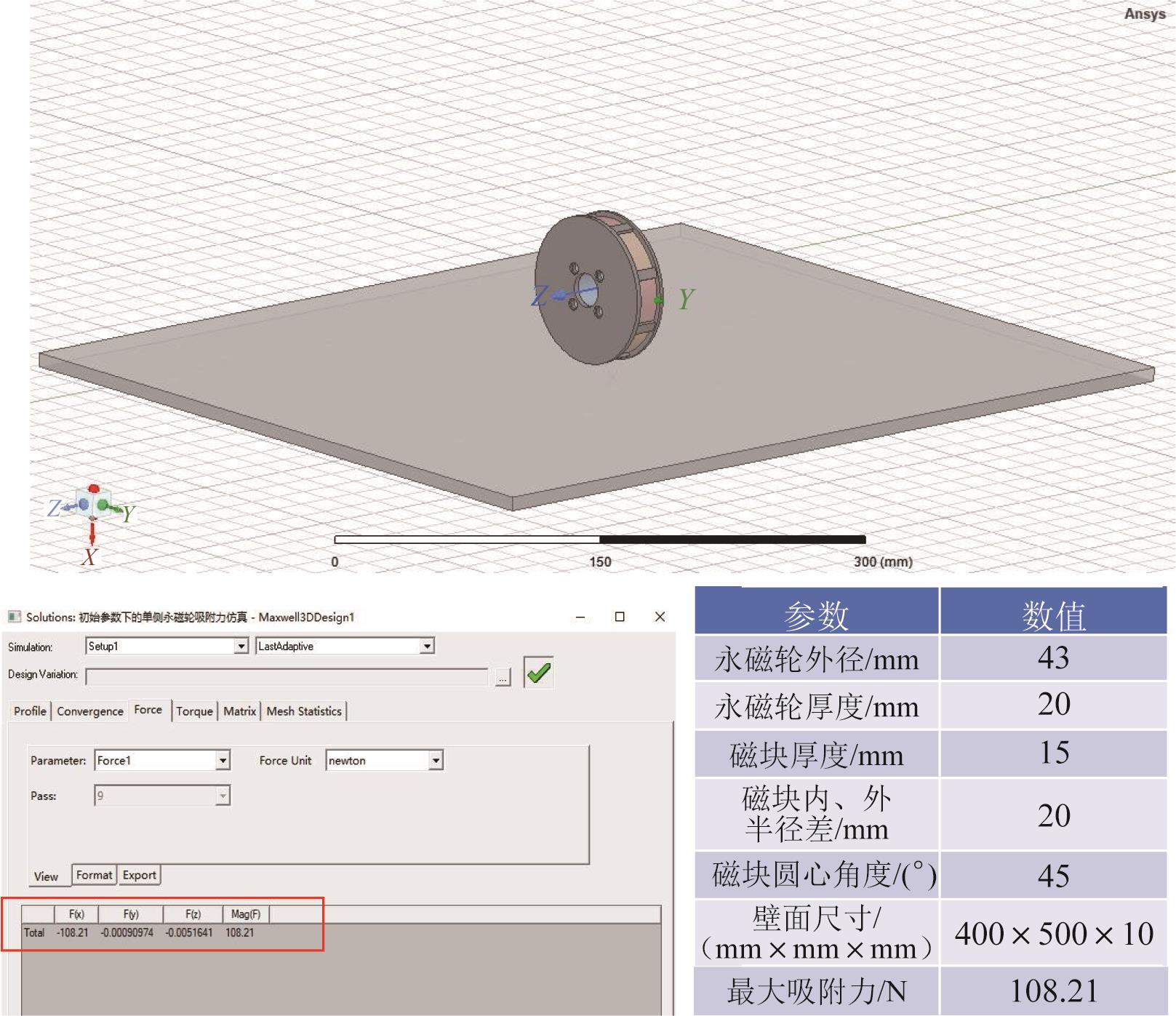
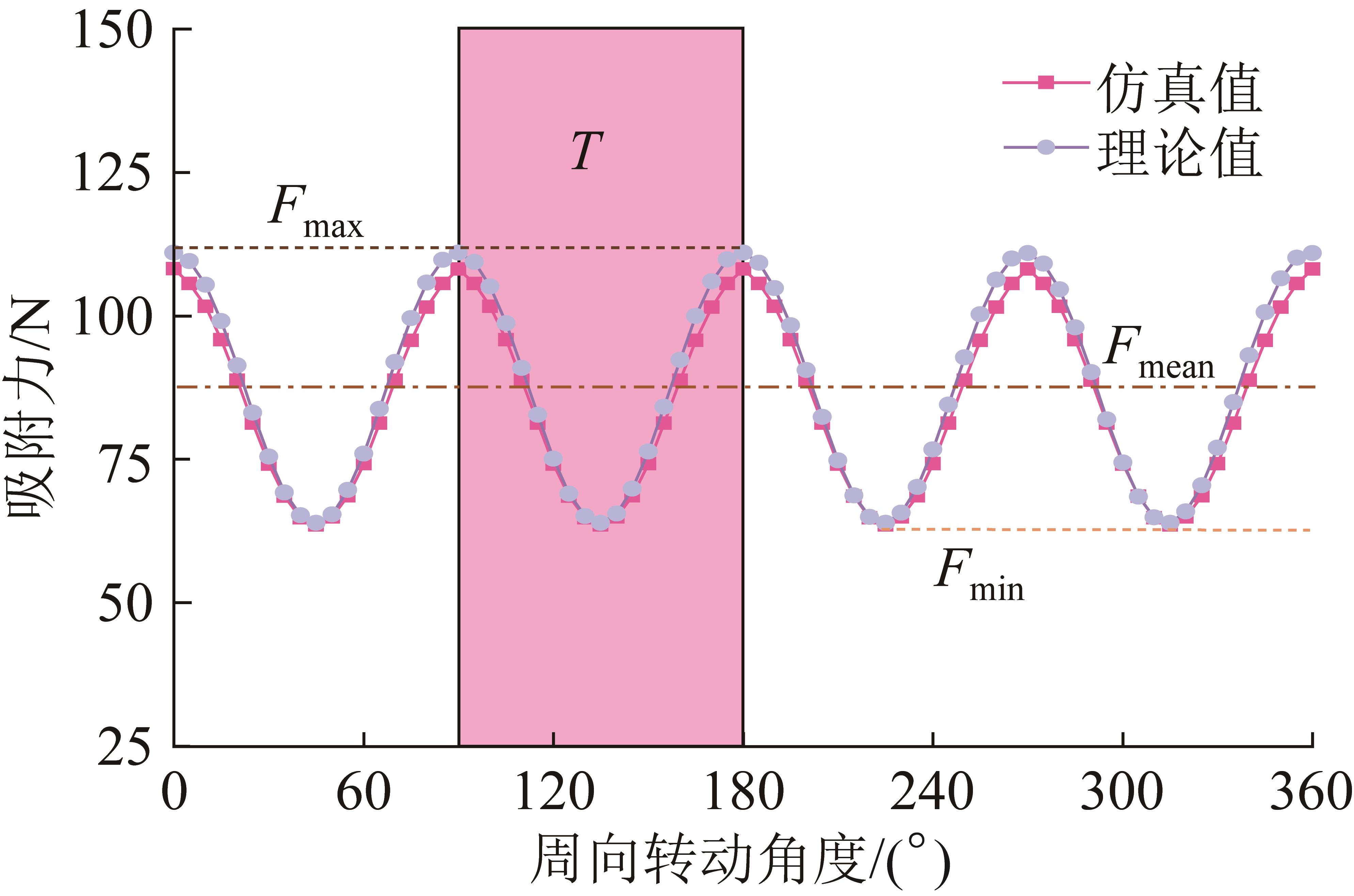
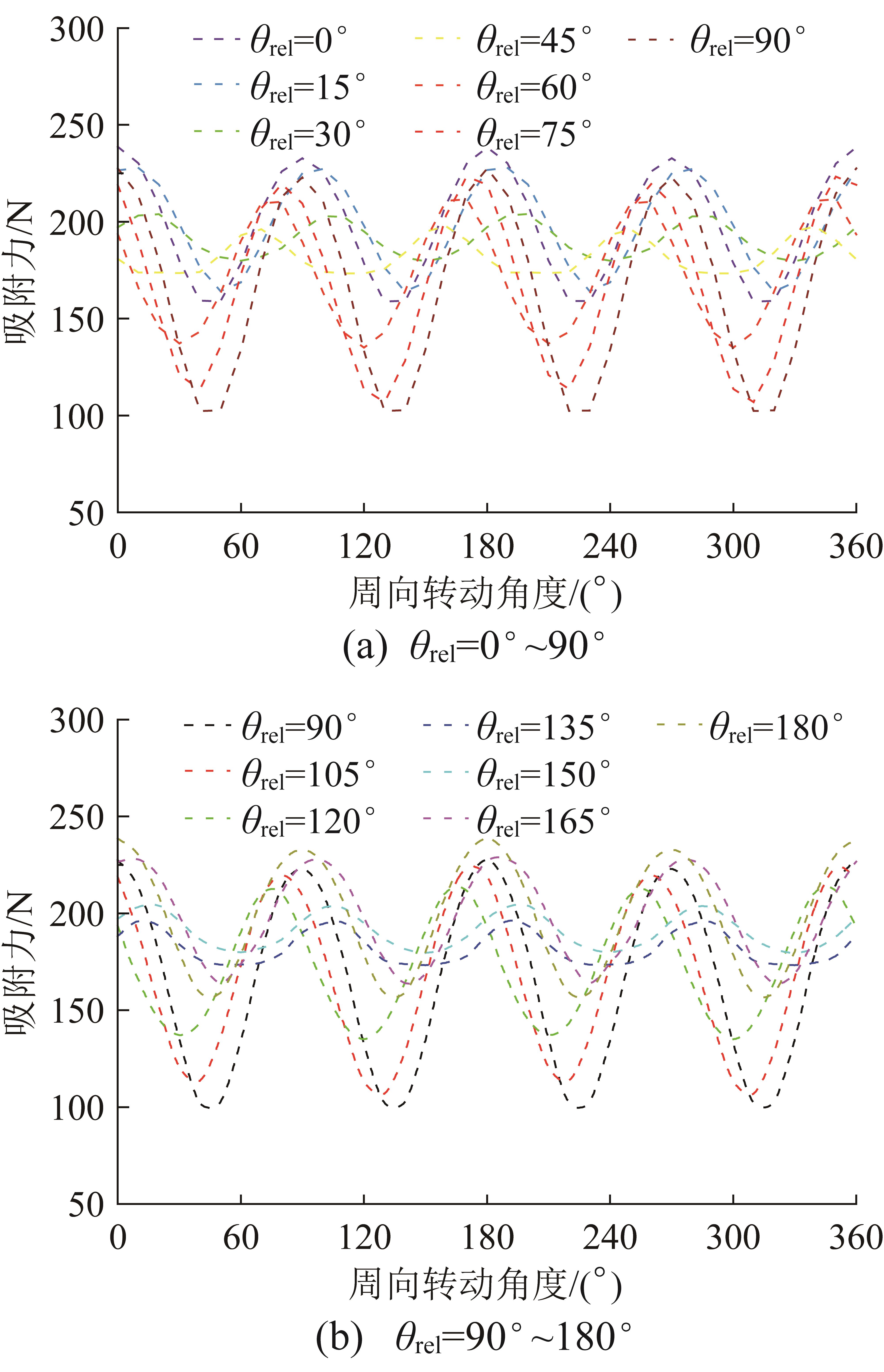
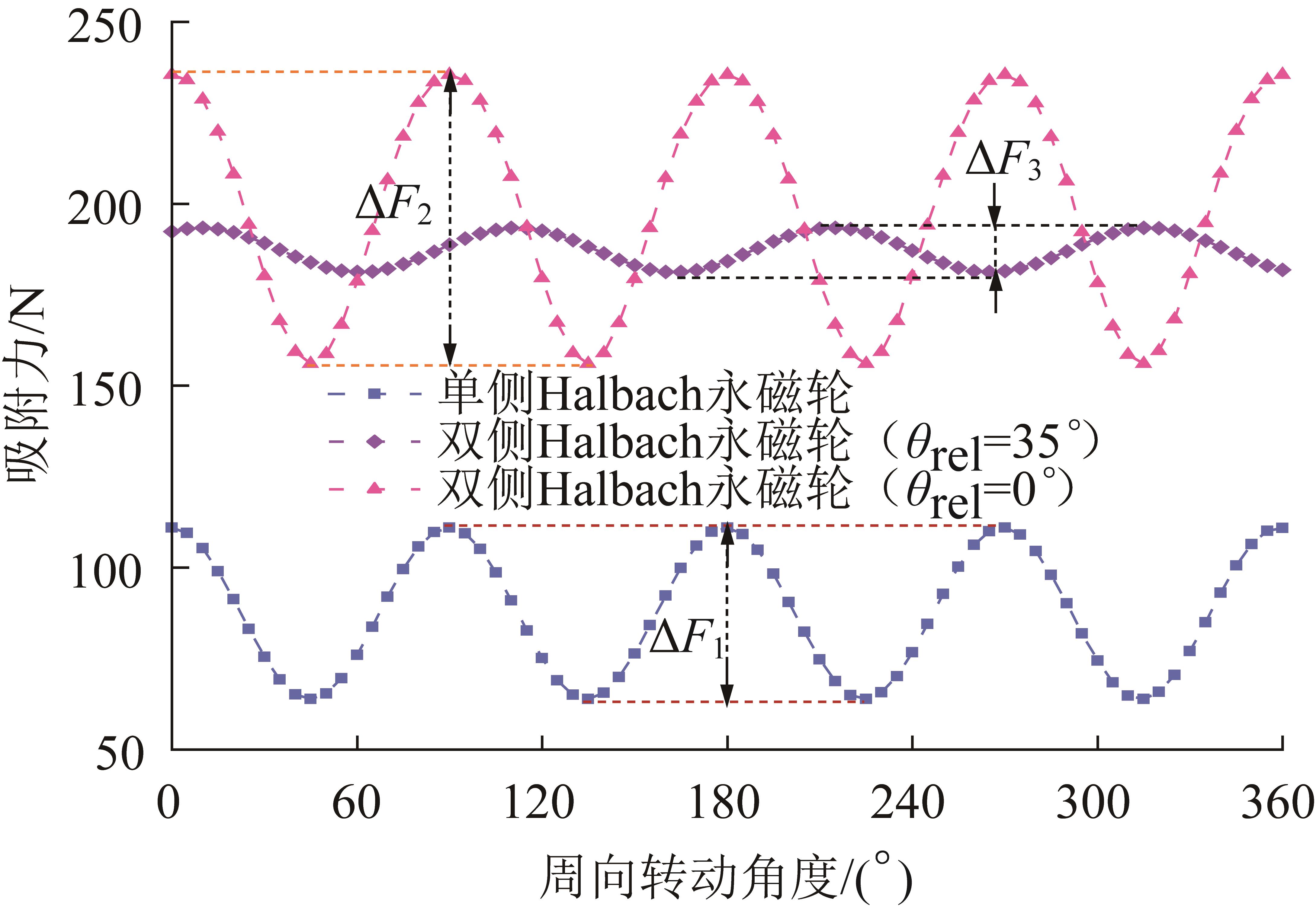
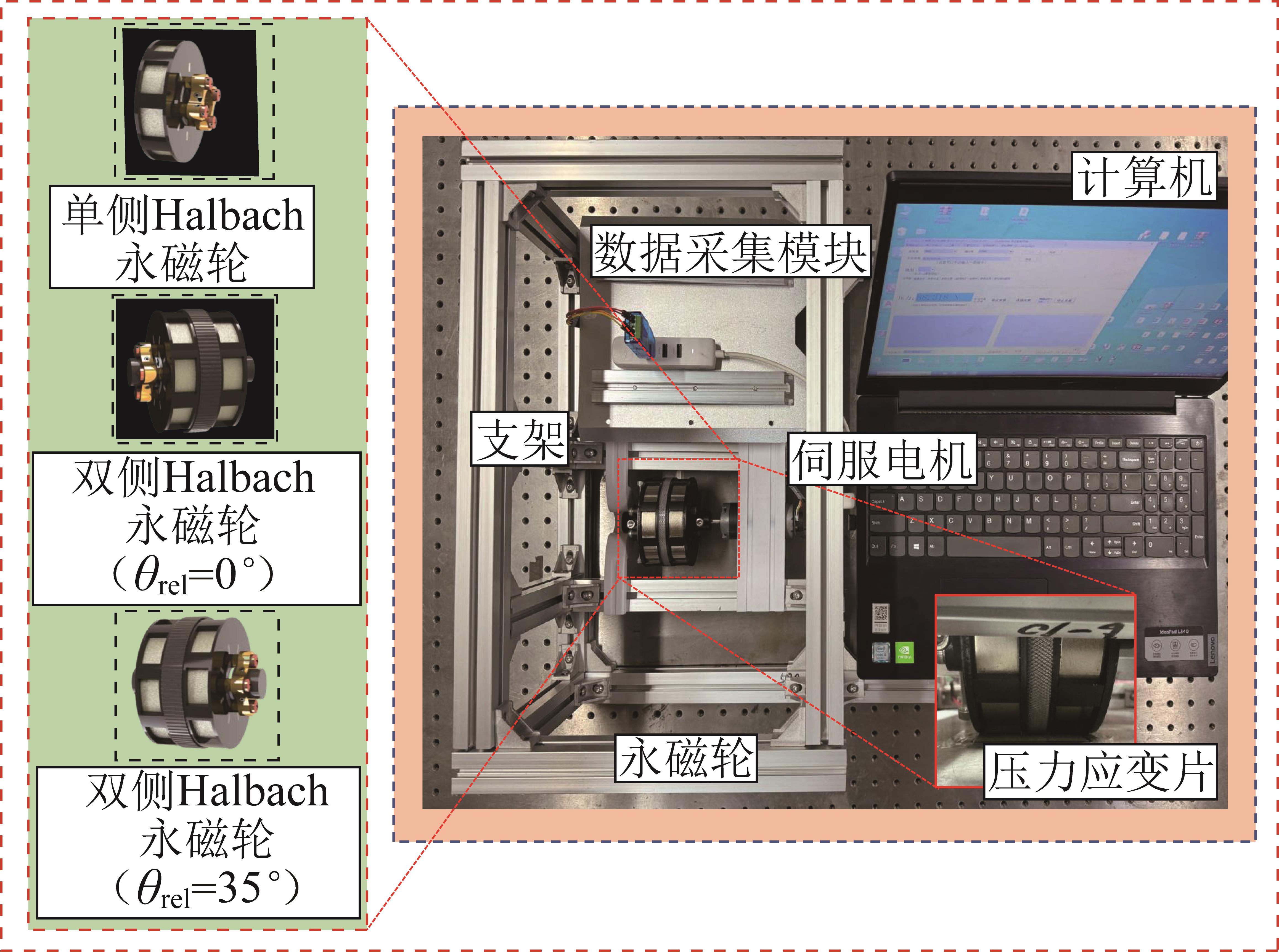
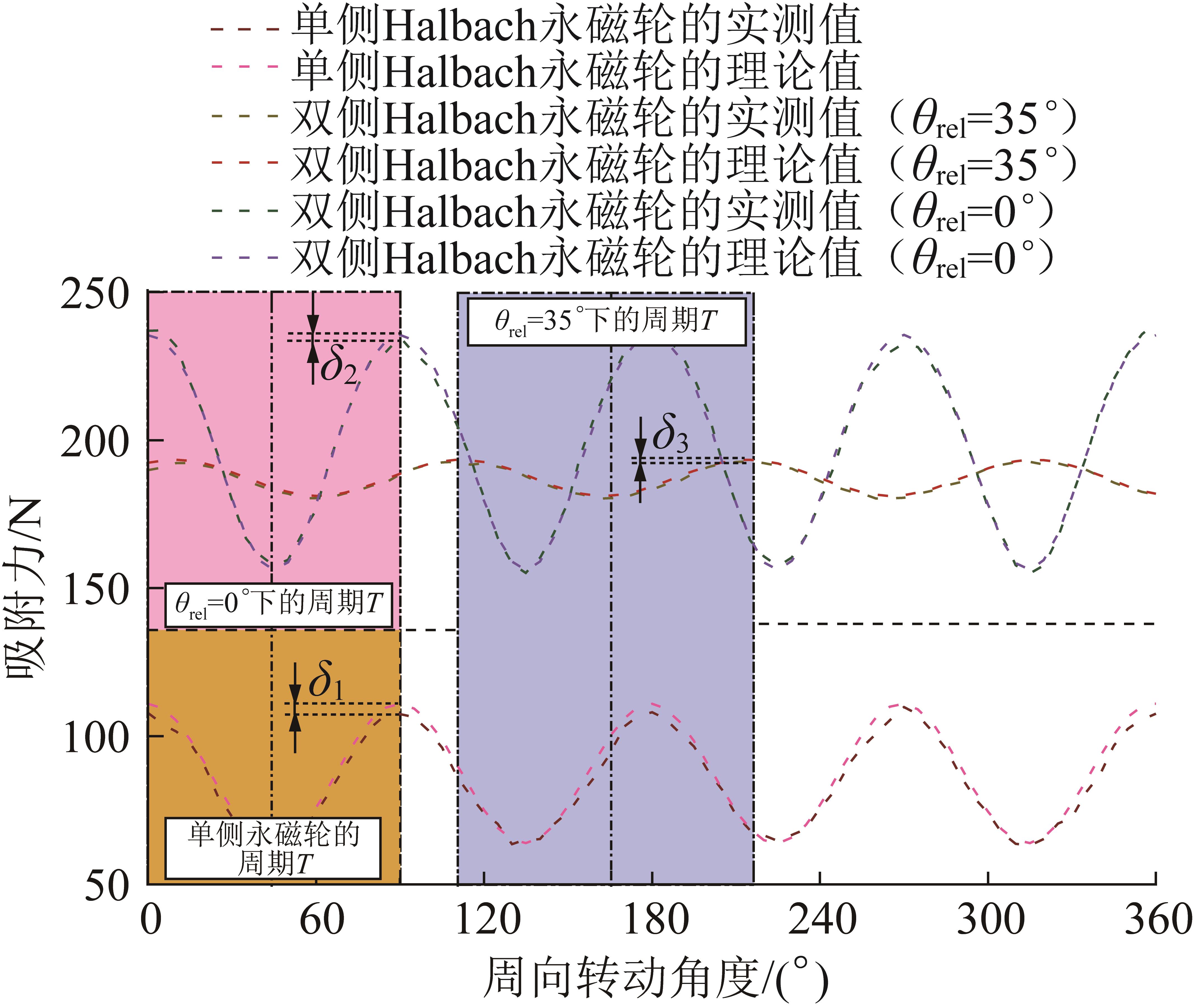
Abstract In order to improve the load-bearing capacity and mobility of permanent magnet adhesion wall-climbing robots on ferromagnetic surfaces, a bilateral Halbach permanent magnet wheel structure is proposed, aiming to address the issues of non-adjustable adhesion force, low overall adhesion force, and large adhesion force fluctuations during circumferential rotation of traditional unilateral Halbach permanent magnet wheels. This structure achieved the enhancement of adhesion performance and effectively suppressed adhesion force fluctuations through the collaborative action of the inner and outer permanent magnet wheels. Based on the theory of magnetic dipoles and the Maxwell stress tensor method, an adhesion force theoretical model of the bilateral Halbach permanent magnet wheel was constructed and its accuracy was verified through the finite element analysis. Meanwhile, parameter indicators for evaluating the adhesion performance of the permanent magnet wheel were established. The influence of the relative rotation angle between the inner and outer permanent magnet wheels on the adhesion force regulation effect was analyzed in detail, and the relative rotation angle was optimized. Finally, an experimental platform for testing permanent magnet wheel adhesion performance was built and the practical research was conducted. The results showed that when the relative rotation angle of the bilateral Halbach permanent magnet wheel was 35°, its average adhesion force reached 187.955 N, and the adhesion force fluctuation coefficient dropped to 0.057. Compared with the traditional unilateral permanent magnet wheel structure, its adhesion force increased by 114.004%, and the adhesion force fluctuation coefficient was reduced by 89.366%. The study demonstrates that the bilateral Halbach permanent magnet wheel structure achieves significant enhancement and controllable adjustment of adhesion performance through the regulation of relative rotation angles, providing theoretical support and practical guidance for the design of high-performance permanent magnet adhesion systems, which is of great significance for improving the reliability and safety of industrial automation equipment.
|
|
Received: 16 June 2025
Published: 28 April 2026
|
|
|
|
Corresponding Authors:
Donglin TANG
E-mail: Cobingo@163.com;tdl840451816@163.com
|
基于双侧Halbach阵列可靠稳定吸附的永磁轮设计与参数优化
为提升永磁吸附爬壁机器人在导磁壁面上的负载能力与机动性能,提出了一种双侧Halbach永磁轮结构,旨在解决传统单侧Halbach永磁轮吸附力不可调、整体吸附力较小以及在周向转动过程中吸附力波动大的问题。该结构通过内、外侧永磁轮的协同作用,实现了吸附性能的增强与吸附力波动的有效抑制。基于磁偶极子理论与麦克斯韦应力张量法,构建了双侧Halbach永磁轮的吸附力理论模型,并通过有限元分析验证了其准确性。同时,构建了评估永磁轮吸附性能的参数指标,重点分析了内、外侧永磁轮之间的相对转角对吸附力调控效果的影响,并对相对转角进行了优化。最后,搭建了永磁轮吸附性能测试实验平台以开展实测研究。结果显示:当双侧Halbach永磁轮的相对转角为35°时,其平均吸附力达到187.955 N,吸附力波动系数降至0.057;相较于传统的单侧永磁轮结构,其平均吸附力提高了114.004%,吸附力波动系数降低了89.366%。研究表明,双侧Halbach永磁轮结构通过相对转角的调节作用,实现了吸附性能的显著增强与可控调节,为高性能永磁吸附系统的设计提供了理论支撑和实践指导,这对提升工业自动化设备的可靠性与安全性具有重要意义。
关键词:
爬壁机器人,
Halbach永磁轮式吸附,
吸附稳定性,
参数优化
|
|
| [[1]] |
YANG P, SUN L Y, ZHANG M L. Design and analysis of a passive adaptive wall-climbing robot on variable curvature ship facades[J]. Applied Ocean Research, 2024, 143: 103879.
|
|
|
| [[2]] |
SYRYKH N V, CHASHCHUKHIN V G. Wall-climbing robots with permanent-magnet contact devices: design and control concept of the contact devices[J]. Journal of Computer and Systems Sciences International, 2019, 58(5): 818-827.
|
|
|
| [[3]] |
SONG Y F, YANG Z Y, CHANG Y, et al. Design and analysis of a wall-climbing robot with passive compliant mechanisms to adapt variable curvatures walls[J]. Robotica, 2024, 42(4): 962-976.
|
|
|
| [[4]] |
FAN J Z, XU T, FANG Q Q, et al. A novel style design of a permanent-magnetic adsorption mechanism for a wall-climbing robot[J]. Journal of Mechanisms and Robotics, 2020, 12(3): 035001.
|
|
|
| [[5]] |
李安, 陶波, 丁汉. 磁吸附爬壁机器人研究进展及其应用探索[J]. 机器人, 2025, 47(1): 123-144. doi:10.13973/j.cnki.robot.240045
LI A, TAO B, DING H. Research progress and application of magnetic adhesion wall-climbing robots[J]. Robot, 2025, 47(1): 123-144.
doi: 10.13973/j.cnki.robot.240045
|
|
|
| [[6]] |
楼飞, 王湘鹤, 张翼旺, 等. 基于永磁吸附的船体维护爬壁机器人设计[J]. 机电工程技术, 2024, 53(5): 113-117, 132. doi:10.3969/j.issn.1009-9492.2024.05.025
LOU F, WANG X H, ZHANG Y W, et al. Design of hull maintenance wall climbing robot based on permanent magnet adsorption[J]. Mechanical & Electrical Engineering Technology, 2024, 53(5): 113-117, 132.
doi: 10.3969/j.issn.1009-9492.2024.05.025
|
|
|
| [[7]] |
LIN S, SONG Y F, WANG H G, et al. Variable curvature adaptation and transformation flow of a passive-compliant magnetic wheeled wall-climbing robot[J]. Mechanism and Machine Theory, 2023, 189: 105440.
|
|
|
| [[8]] |
WANG B Y, LI P X, LI P B, et al. Development of a wheeled wall-climbing robot with an internal corner wall adaptive magnetic adhesion mechanism[J]. Journal of Field Robotics, 2025, 42(1): 97-114.
|
|
|
| [[9]] |
钟道方, 田颖, 张明路. 轮腿式爬壁机器人的永磁吸附装置设计与优化[J]. 工程设计学报, 2022, 29(1): 41-50. doi:10.3785/j.issn.1006-754X.2022.00.007
ZHONG D F, TIAN Y, ZHANG M L. Design and optimization of permanent magnet adsorption device for wheel-legged wall-climbing robot[J]. Chinese Journal of Engineering Design, 2022, 29(1): 41-50.
doi: 10.3785/j.issn.1006-754X.2022.00.007
|
|
|
| [[10]] |
ZHANG D, LI Z H, JIA P, et al. Optimization design and trajectory error compensation of a facade-adaptive wall-climbing robot[J]. Symmetry, 2023, 15(2): 255.
|
|
|
| [[11]] |
张栋, 杨培, 黄哲轩, 等. 爬壁机器人悬摆式磁吸附机构的设计与优化[J]. 工程设计学报, 2023, 30(3): 334-341. doi:10.3785/j.issn.1006-754X.2023.00.031
ZHANG D, YANG P, HUANG Z X, et al. Design and optimization of pendulous magnetic adsorption mechanism for wall-climbing robots[J]. Chinese Journal of Engineering Design, 2023, 30(3): 334-341.
doi: 10.3785/j.issn.1006-754X.2023.00.031
|
|
|
| [[12]] |
胡晓林, 郭润兰, 黄华, 等. 变曲率立面自适应爬壁机器人结构的设计与分析[J]. 机器人, 2024, 46(5): 576-590.
HU X L, GUO R L, HUANG H, et al. Design and analysis on an adaptive wall-climbing robot structure for variable curvature facade[J]. Robot, 2024, 46(5): 576-590.
|
|
|
| [[13]] |
邱仕诚, 伍剑波, 赵恒忠, 等. 一种基于磁力吸附的储罐爬壁机器人本体设计[J]. 中国机械工程, 2022, 33(3): 270-278. doi:10.3969/j.issn.1004-132X.2022.03.003
QIU S C, WU J B, ZHAO H Z, et al. Body design of a storage tank wall-climbing robot based on magnetic adsorption[J]. China Mechanical Engineering, 2022, 33(3): 270-278.
doi: 10.3969/j.issn.1004-132X.2022.03.003
|
|
|
| [[14]] |
GAO S, HOU R L, LI J, et al. Magnetic field analysis and structure design of a new magnetic wheel for wall-climbing robot[J]. Journal of Superconductivity and Novel Magnetism, 2022, 35(2): 529-537.
|
|
|
| [[15]] |
CHEN J K, HE K, FANG H T, et al. Design and simulation analysis of a magnetic adsorption mechanism for a wall-climbing robot[C]//Intelligent Robotics and Applications. Cham: Springer, 2021: 147-157.
|
|
|
| [[16]] |
ETO H, ASADA H H. Development of a wheeled wall-climbing robot with a shape-adaptive magnetic adhesion mechanism[C]//2020 IEEE International Conference on Robotics and Automation. Paris, May 31-Aug. 31, 2020.
|
|
|
| [[17]] |
JIANG Z, ZHAO Z, CHEN B, et al. Design and analysis of a passive adaptive wall-climbing robot based on five-bar mechanisms[J]. Ocean Engineering, 2024, 298: 117140.
|
|
|
| [[18]] |
JIAO S L, ZHANG X J, ZHANG X, et al. Magnetic circuit analysis of Halbach array and improvement of permanent magnetic adsorption device for wall-climbing robot[J]. Symmetry, 2022, 14(2): 429.
|
|
|
| [[19]] |
YAN C F, SUN Z G, ZHANG W Z, et al. Design of novel multidirectional magnetized permanent magnetic adsorption device for wall-climbing robots[J]. International Journal of Precision Engineering and Manufacturing, 2016, 17(7): 871-878.
|
|
|
| [[20]] |
杨培, 张明路, 孙凌宇. 爬壁机器人磁吸附模块设计分析与结构参数优化[J]. 工程设计学报, 2024, 31(5): 592-602.
YANG P, ZHANG M L, SUN L Y. Design analysis and structural parameter optimization for magnetic adsorption module of wall-climbing robot[J]. Chinese Journal of Engineering Design, 2024, 31(5): 592-602.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|