| Robotic and Mechanism Design |
|

|
|
|
| Study on vibration response of tracked robot based on multi-body coupling of supporting wheel-track-ground |
Jiaqi SONG( ),Hong ZHANG(),Jingyu WANG,Guozhu YIN ),Hong ZHANG(),Jingyu WANG,Guozhu YIN |
| School of Mechanical Engineering, Taiyuan University of Science and Technology, Taiyuan 030024, China |
|
|
|
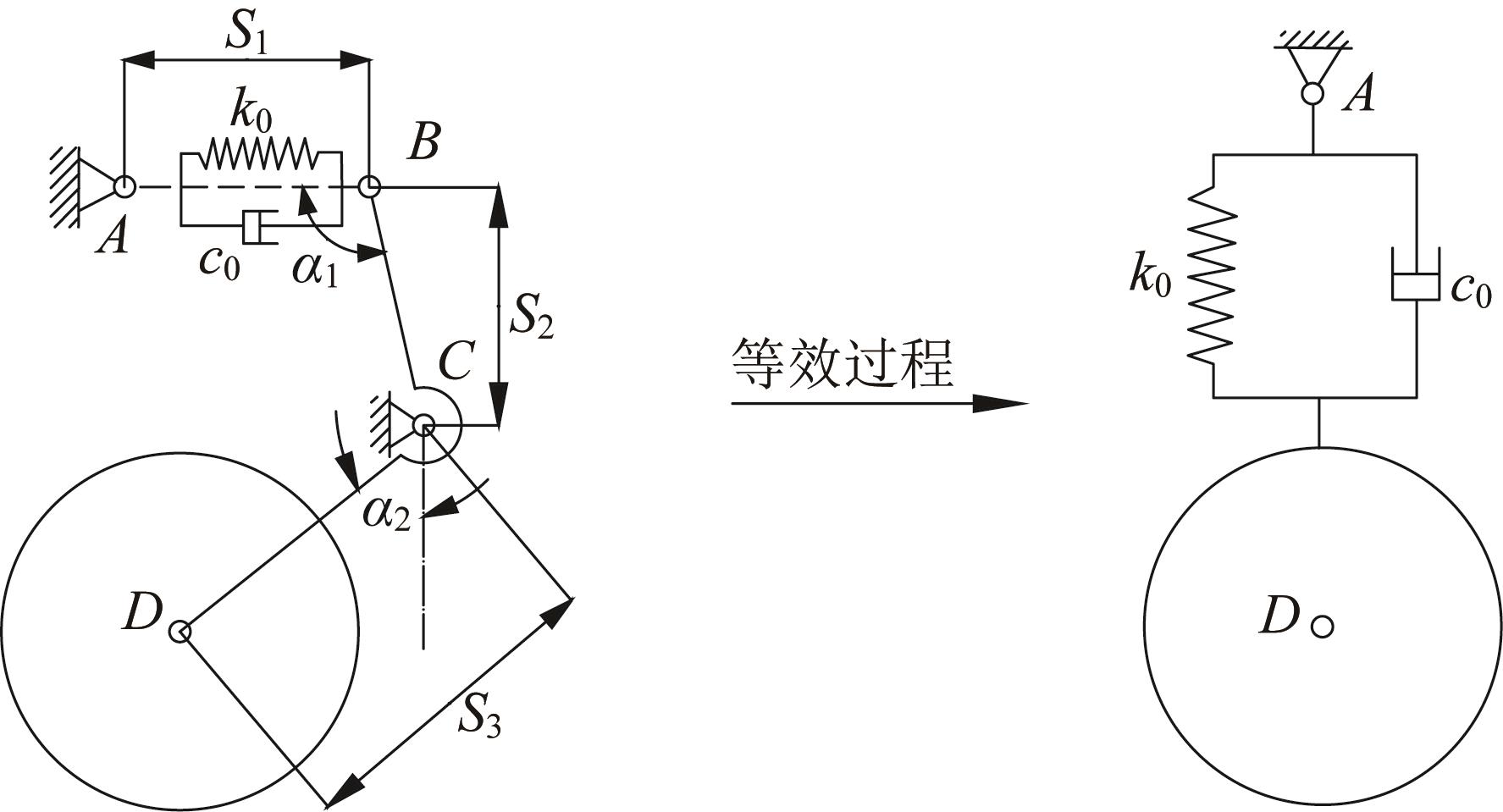
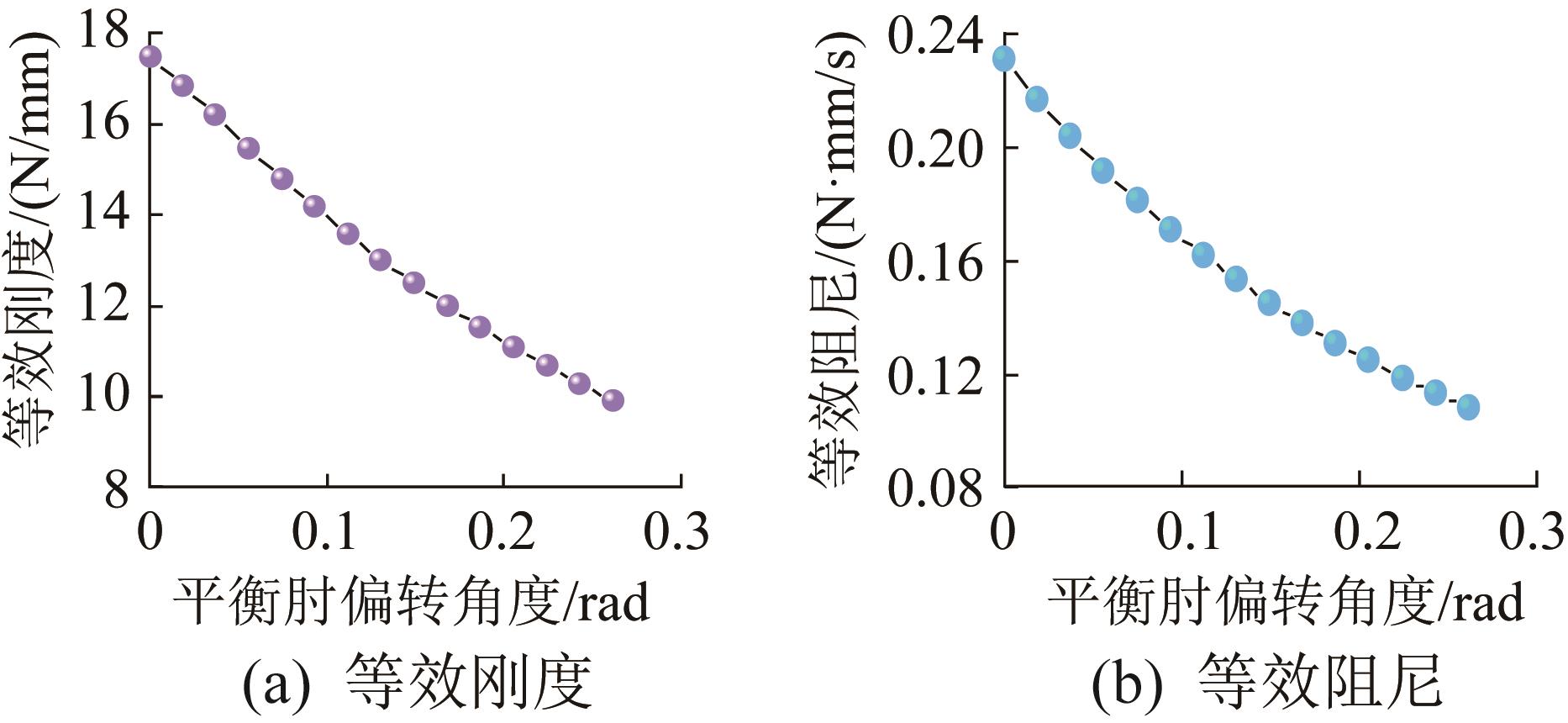
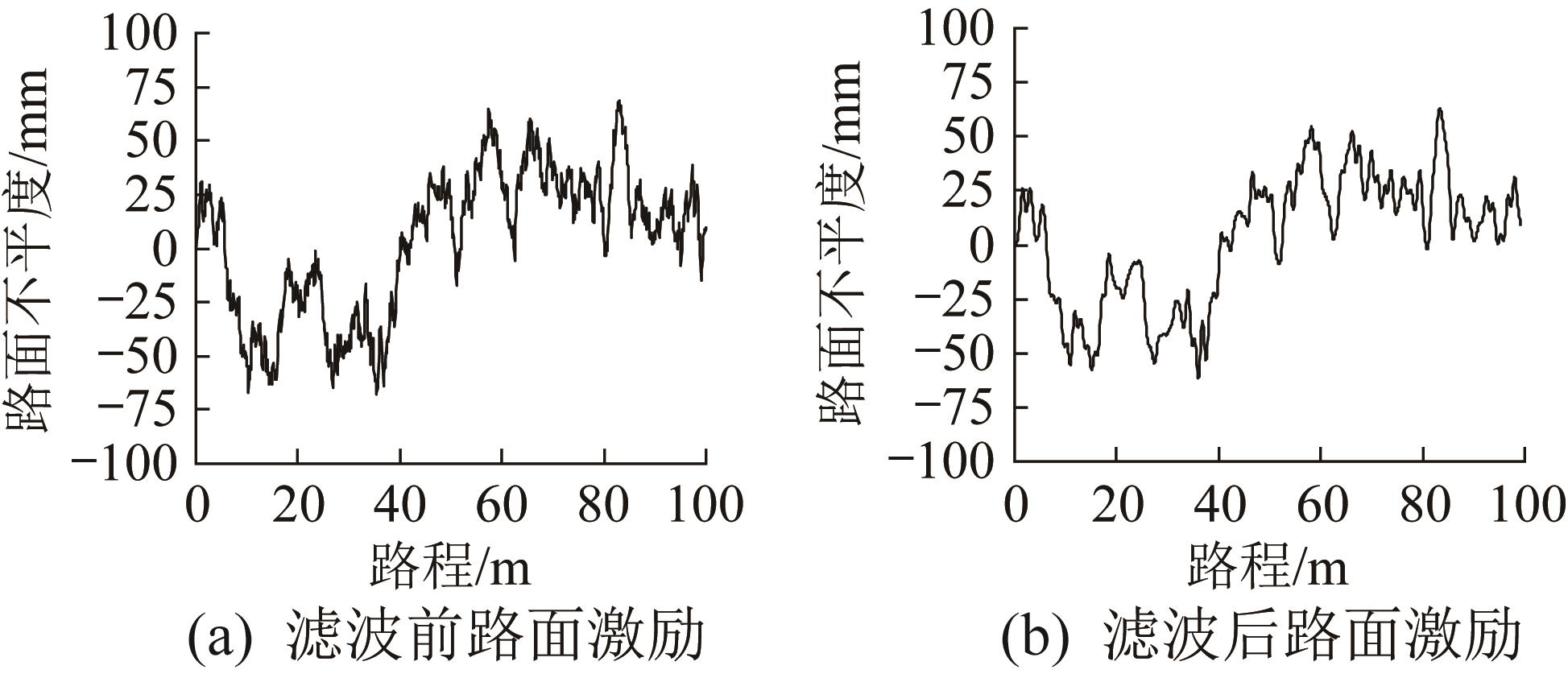
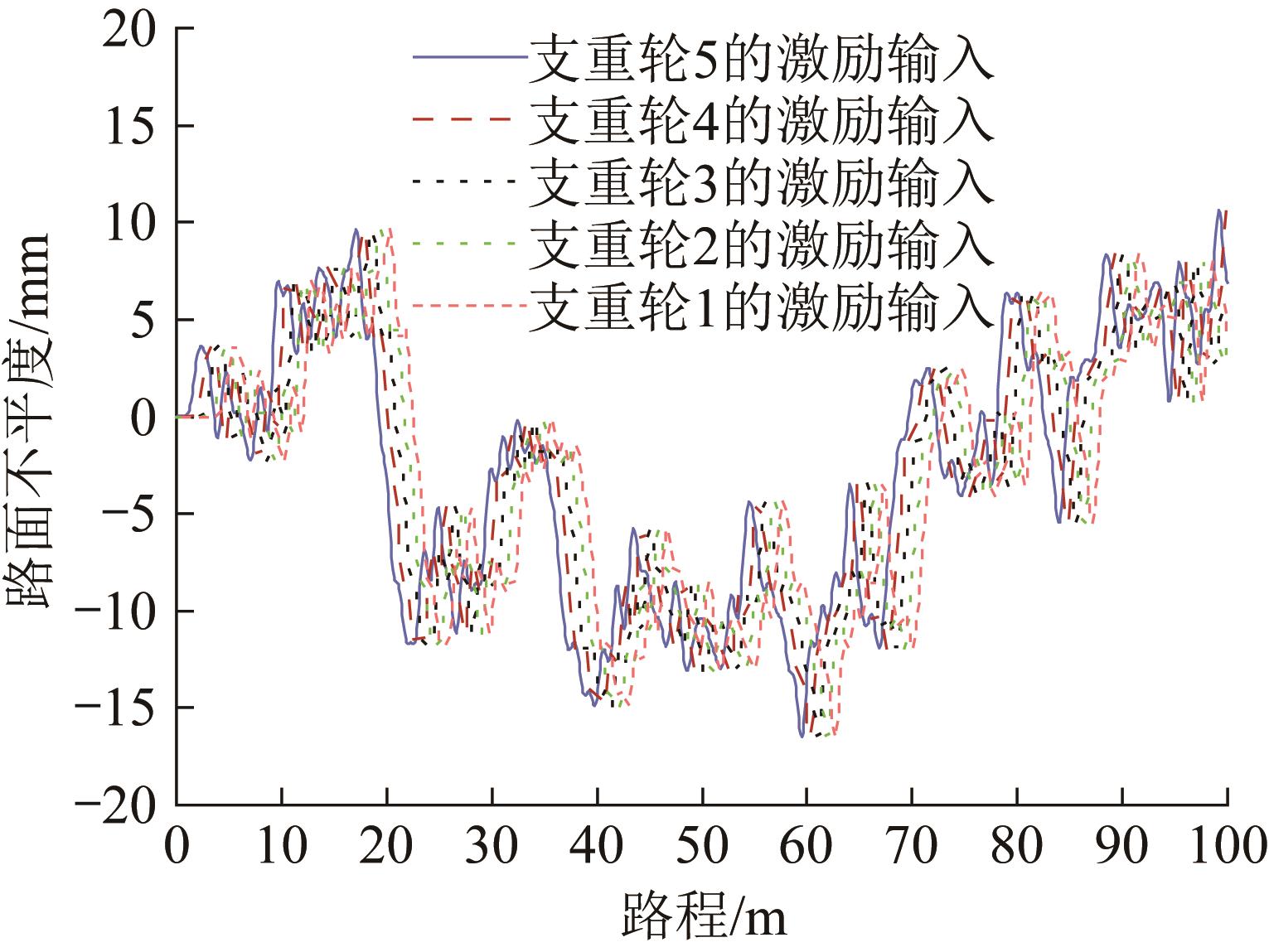
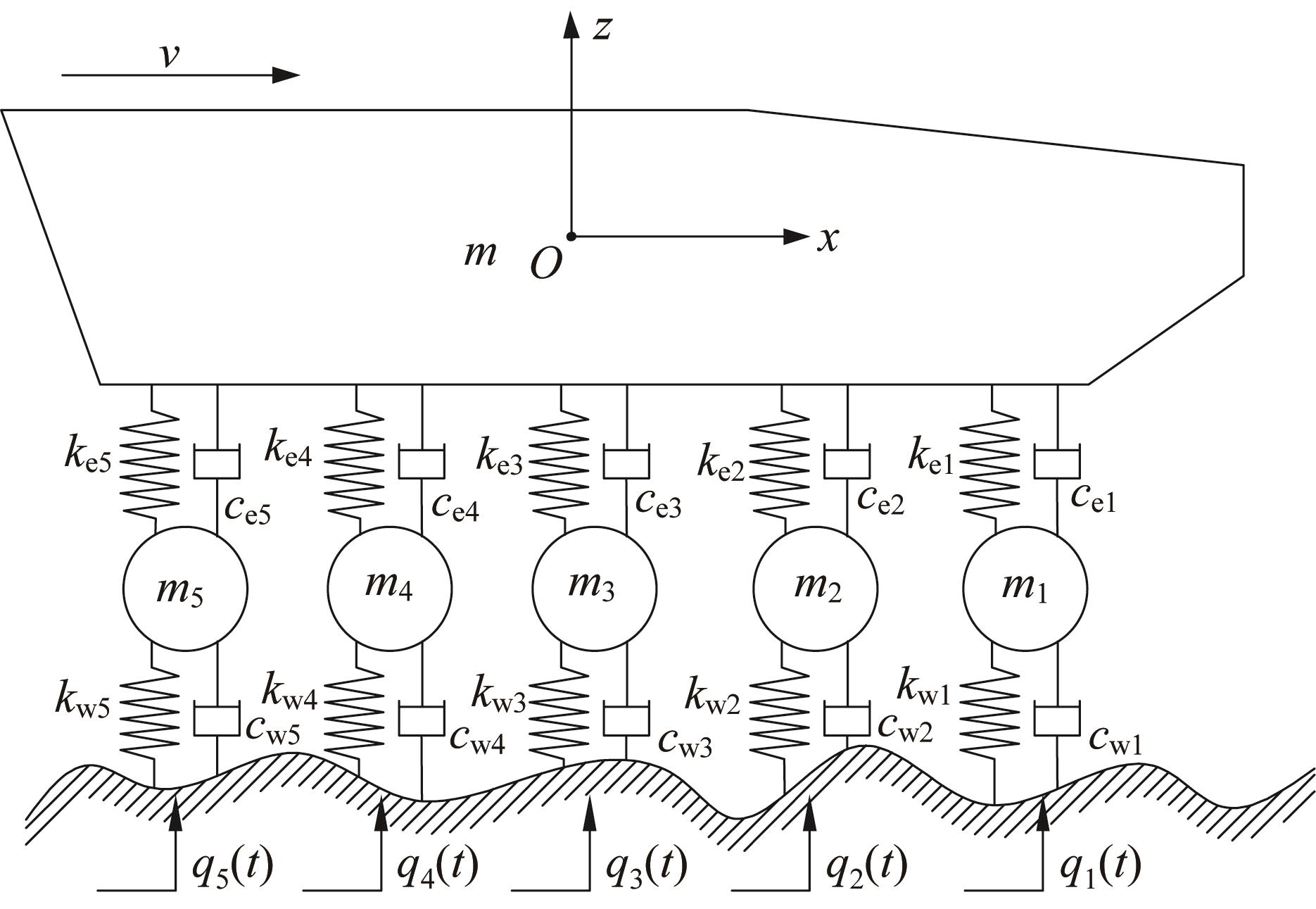
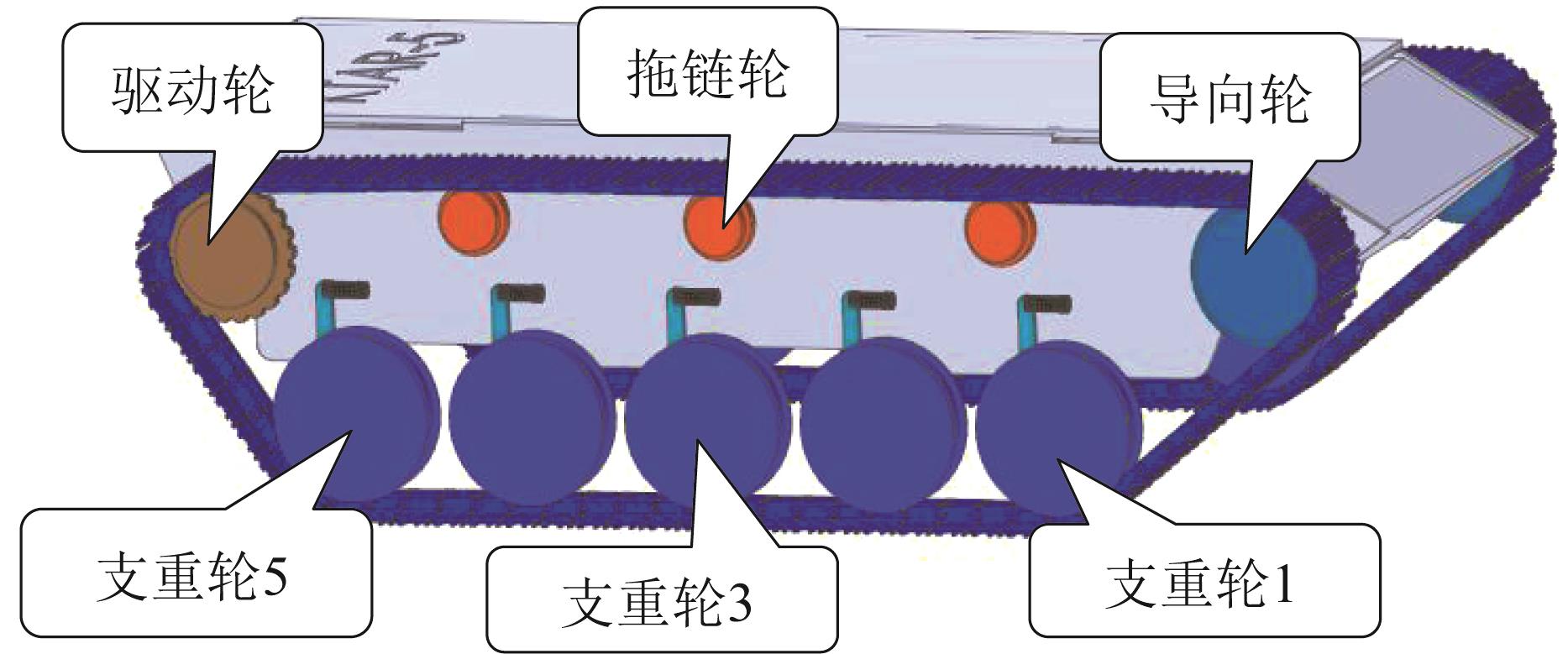
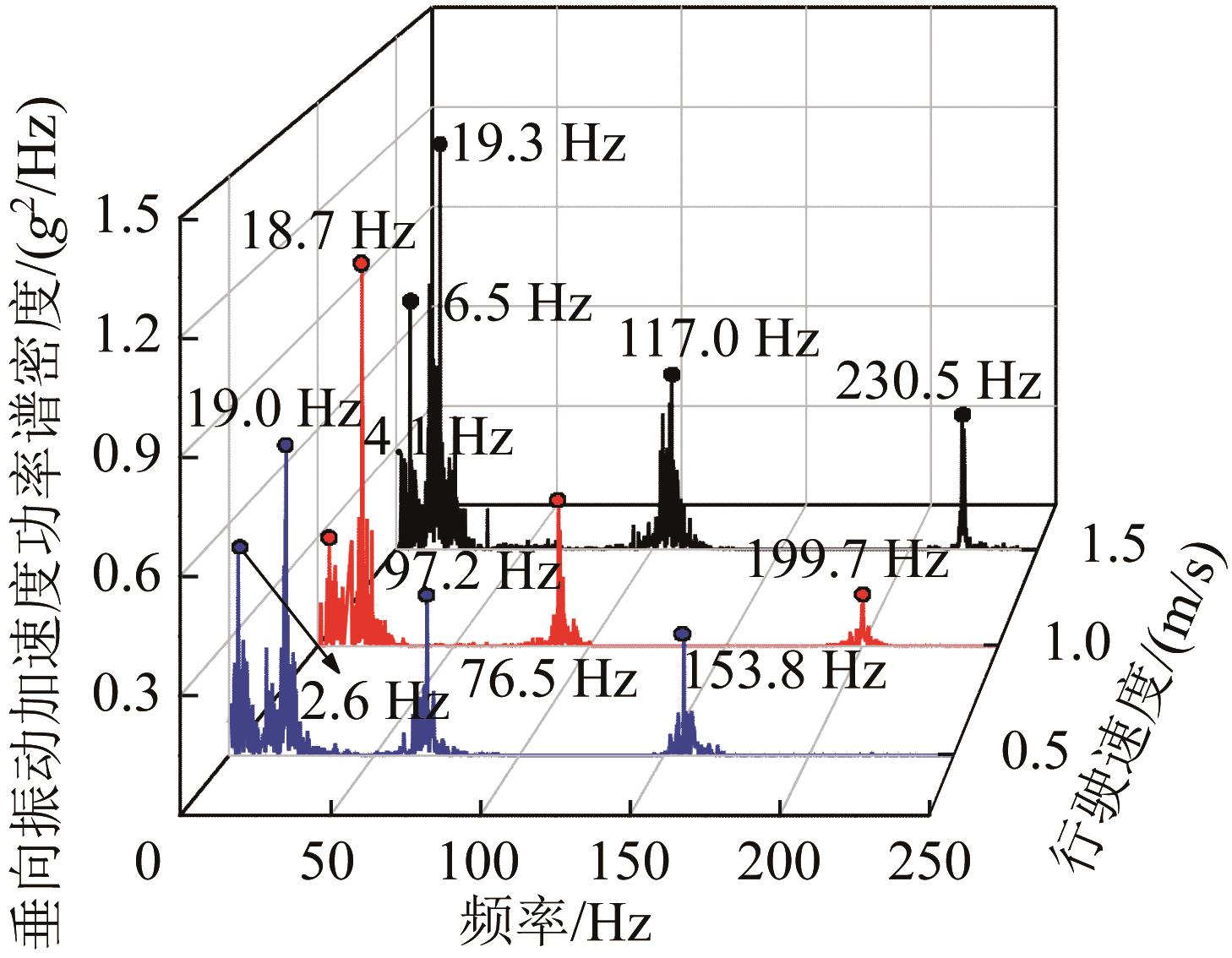
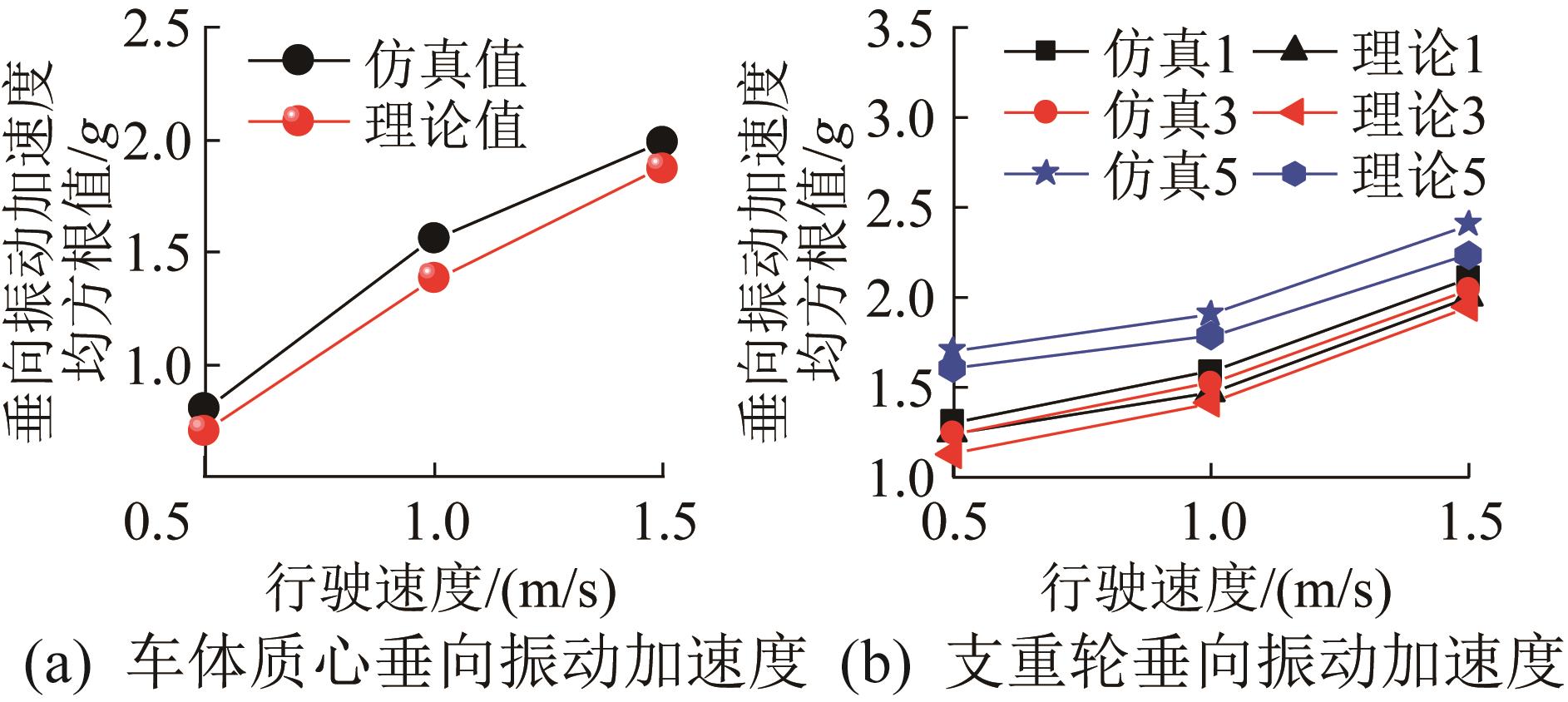
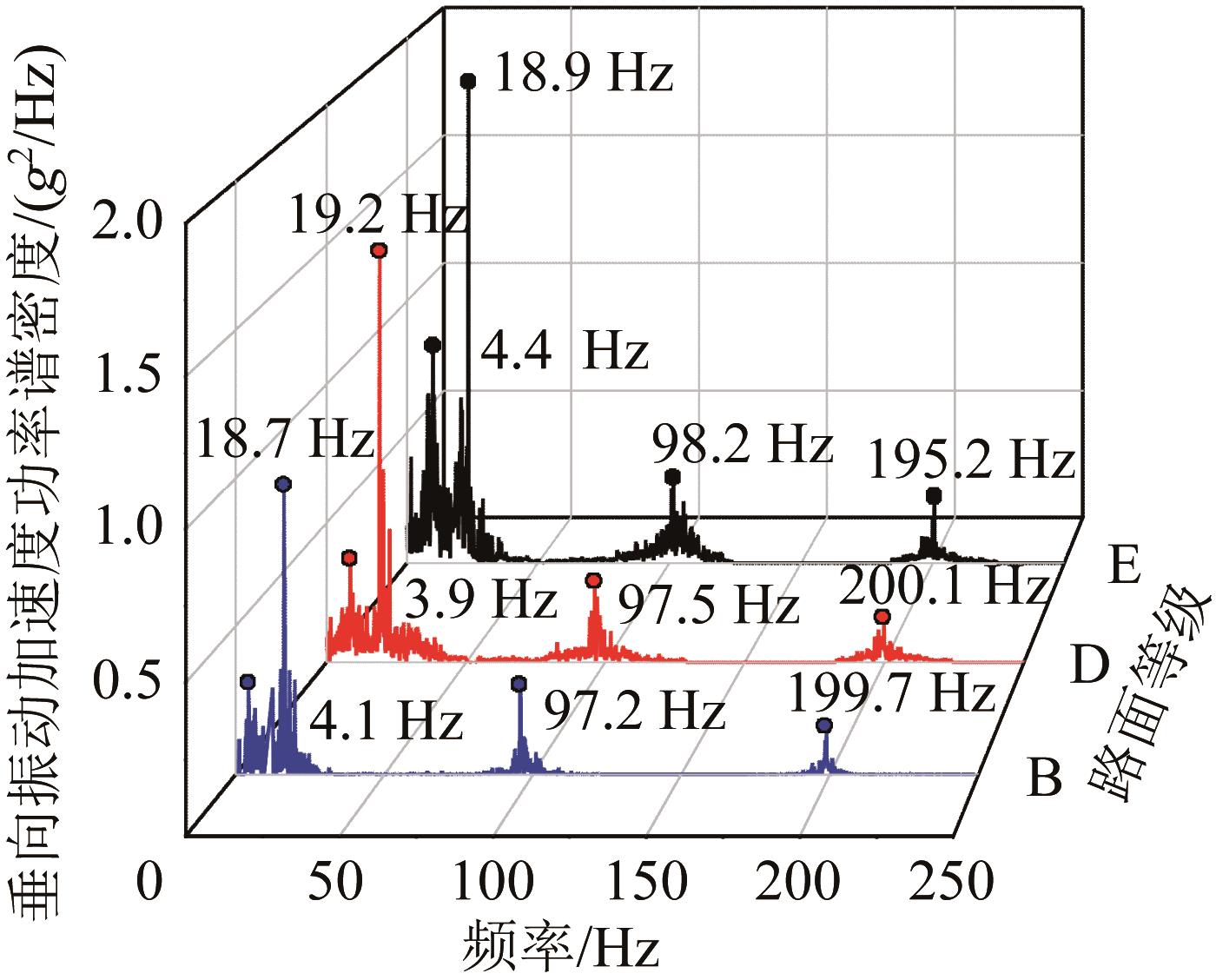
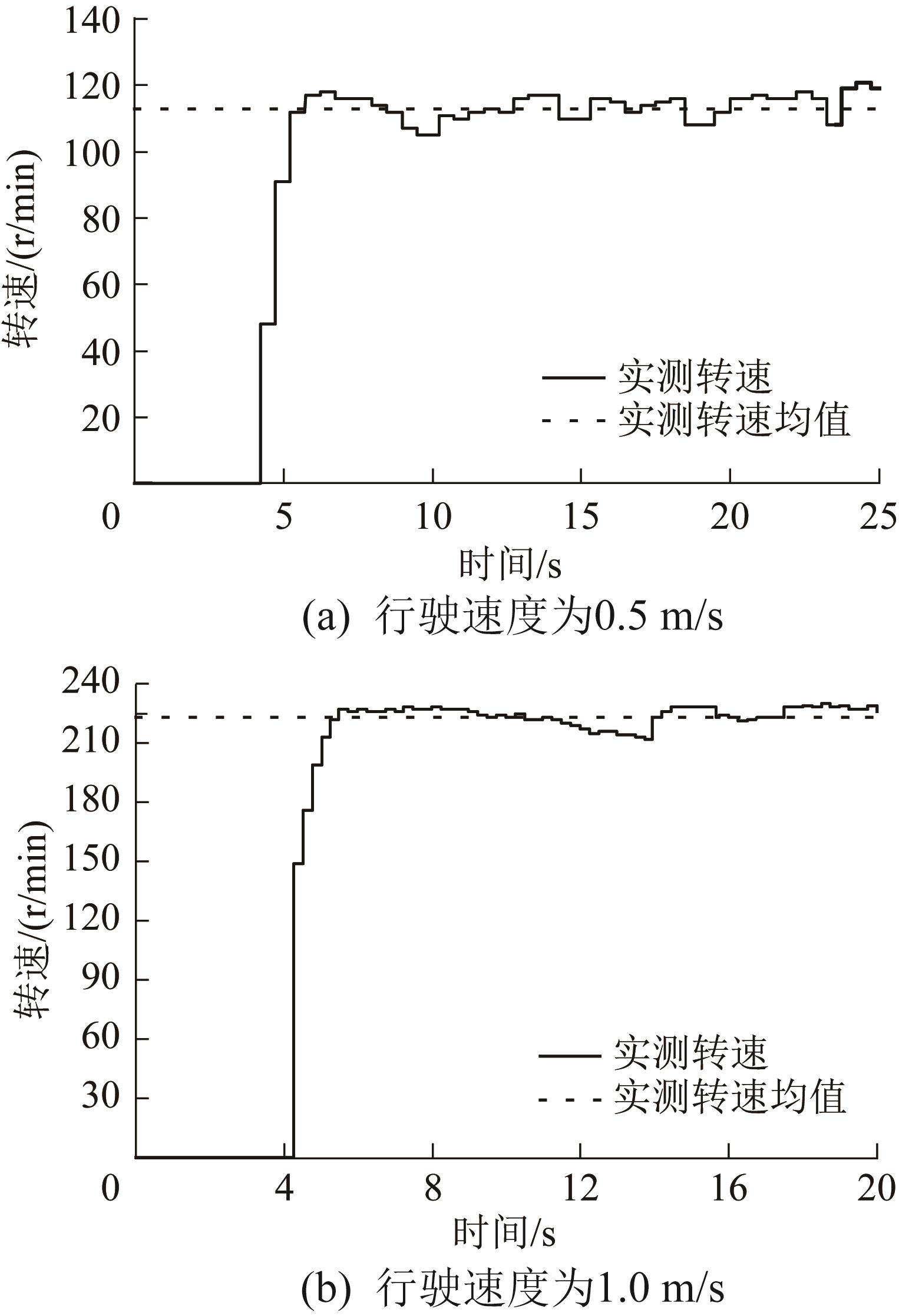
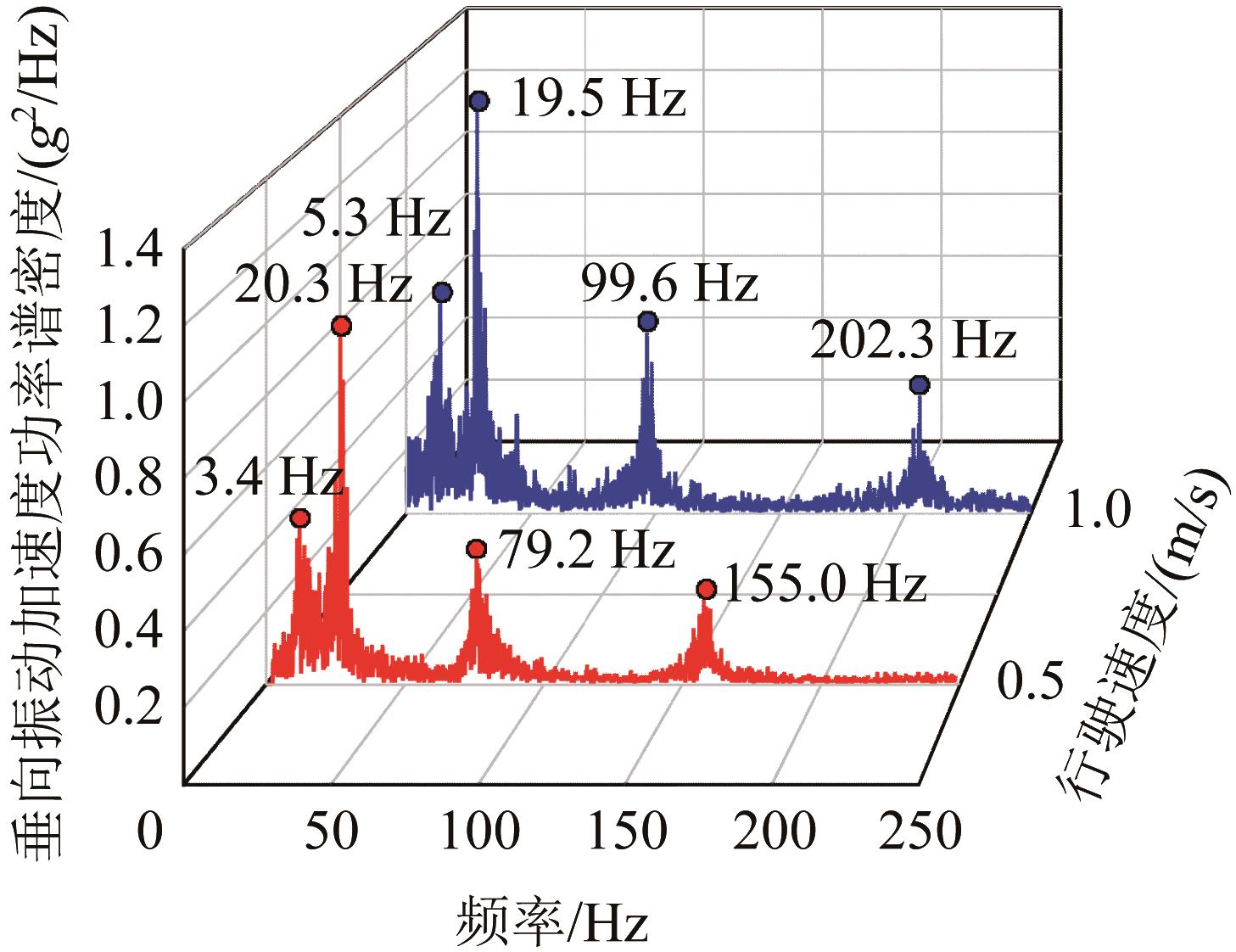
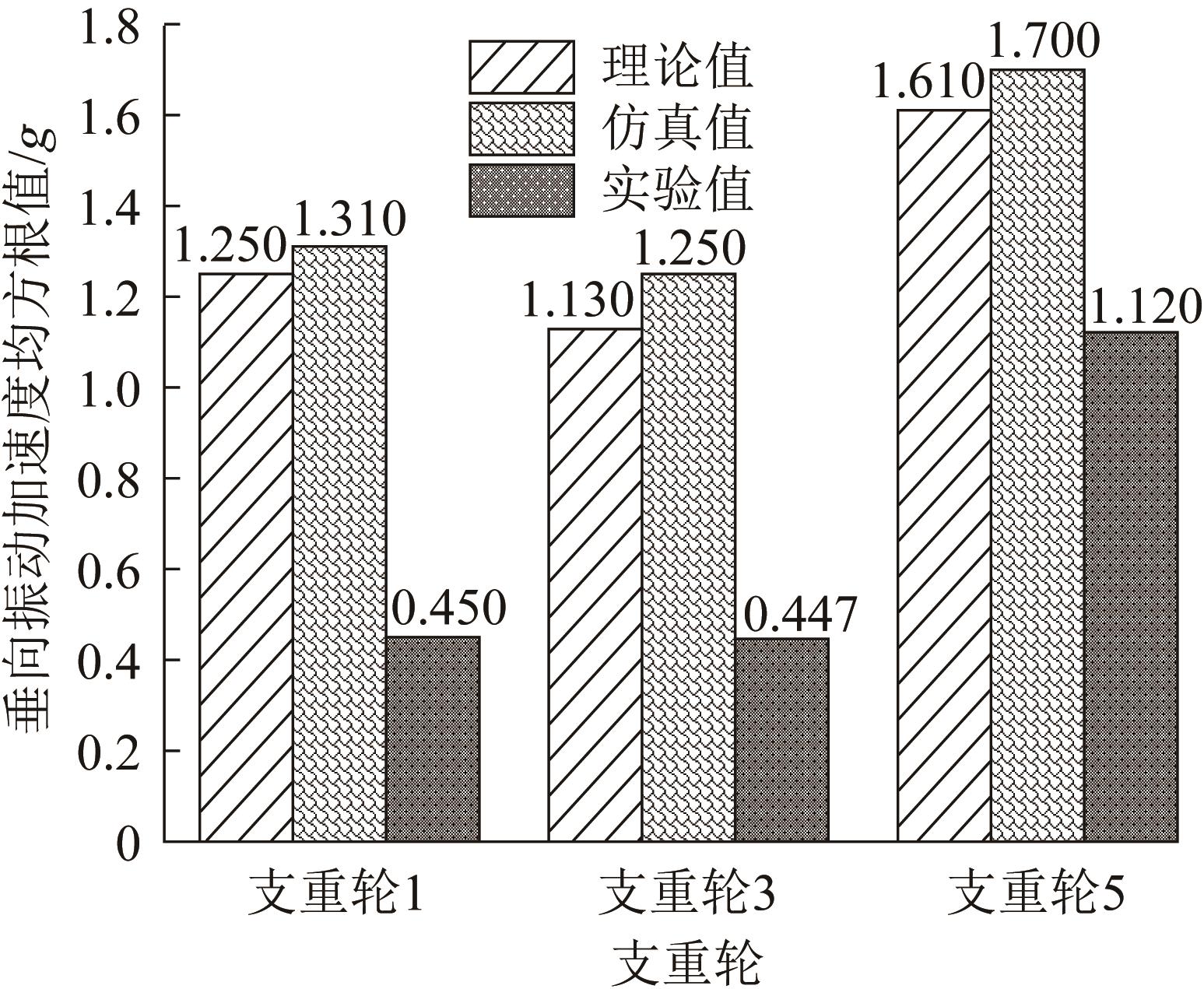
Abstract The construction of supporting wheel-track-ground multi-body coupling system is an important link for the travelling smoothness study of tracked robots. Taking the unilateral five- supporting wheel tracked robot as the study object, the theoretical estimation model for tracked robot vibration was established on the basis of the nonlinear suspension system model and the road excitation considering the track filtering effect. Then, based on the simulation experiments of the tracked robot under working conditons with different road levels and different driving speeds, the effects of driving speed and road excitation on the vertical vibration of the robot body and its supporting wheels were quantitatively analyzed by the root mean square value. Finally, the theoretical vibration estimation model and dynamics simulation model of the seven-degree-of-freedom semi-vehicle were verified by external road experiments. The results showed that the vertical vibration of the tracked robot body increased linearly with the increase of driving speed and road roughness, and the track had a filtering effect on the road excitation. The vertical vibration acceleration of the tracked robot body centroid and the supporting wheel 1, 3, 5 were most sensitive to the road excitation, and the power spectral density amplitude of the vertical vibration acceleration of the robot body was the largest when the frequency was about 19 Hz. As the supporting wheel 5 was close to the driving section, the polygonal effect generated by the track engaging with the active wheel made its vertical vibration larger than that of the other supporting wheels. The combination of theoretical modeling, simulation analysis and external experiment provides a new idea for the study of vibration response characteristics of tracked robots under different road conditions.
|
|
Received: 21 August 2023
Published: 26 August 2024
|
|
|
| Fund: SONG J Q, ZHANG H, WANG J Y, et al. Study on vibration response of tracked robot based on multi-body coupling of supporting wheel-track-ground [J]. Chinese Journal of Engineering Design, 2024, 31(4): 456-464 |
|
Corresponding Authors:
Hong ZHANG
E-mail: 1340458994@qq.com;hexie007@163.com
|
基于支重轮-履带-地面多体耦合的履带机器人振动响应研究
构建支重轮-履带-地面多体耦合系统是研究履带机器人行驶平顺性的重要环节。以单侧五支重轮履带机器人为研究对象,在非线性悬挂系统模型以及考虑履带滤波作用的路面激励的基础上,建立了履带机器人振动理论估算模型。然后,基于履带机器人在不同等级路面及不同行驶速度工况下的仿真实验,利用均方根值定量分析了行驶速度、路面激励对机器人车体及其支重轮垂向振动的影响。最后,通过开展外路实验来验证七自由度半车的振动理论估算模型和动力学仿真模型。结果表明:随着行驶速度和路面不平度的提高,履带机器人车体的垂向振动近似呈线性增大,履带对路面激励有滤波作用。履带机器人车体质心及支重轮1,3,5的垂向振动加速度对路面激励最为敏感,车体垂向振动加速度功率谱密度幅值在频率为19 Hz左右时最大。由于支重轮5靠近驱动段,履带与主动轮啮合产生的多边形效应使其垂向振动相对于其他支重轮偏大。理论建模、仿真分析及外路实验相结合的方法为履带机器人在不同路况下的振动响应特性研究提供了新思路。
关键词:
履带机器人,
多体耦合,
支重轮,
垂向振动,
响应特性
|
|
| [1] |
覃凌云,杨书仪,陈哲吾,等.路面激励下的履带车辆负重轮动载荷研究[J].振动、测试与诊断,2021,41(4):652-659,826-827. doi:10.16450/j.cnki.issn.1004-6801.2021.04.003
QIN L Y, YANG S Y, CHEN Z W, et al. Road wheels' dynamic load of tracked vehicle under road excitation[J]. Journal of Vibration, Measurement & Diagnosis, 2021, 41(4): 652-659, 826-827.
doi: 10.16450/j.cnki.issn.1004-6801.2021.04.003
|
|
|
| [2] |
马星国,李方贵,尤小梅.履带车辆悬挂系统当量化及车辆平面数学模型建立[J].机械工程学报,2015,51(18):143-150. doi:10.3901/jme.2015.18.143
MA X G, LI F G, YOU X M. Equivalent method of suspension system and the establishing of plane mathematical modeling of tracked vehicle[J]. Journal of Mechanical Engineering, 2015, 51(18): 143-150.
doi: 10.3901/jme.2015.18.143
|
|
|
| [3] |
赵旗,王培德,罗兰,等.路面激励Simulink模型的建立及其应用[J].科学技术与工程,2018,18(1):128-132. doi:10.3969/j.issn.1671-1815.2018.01.022
ZHAO Q, WANG P D, LUO L, et al. Establishment of Simulink model for road excitation and its application[J]. Science Technology and Engineering, 2018, 18(1): 128-132.
doi: 10.3969/j.issn.1671-1815.2018.01.022
|
|
|
| [4] |
ATA W G, OYADIJI S O. An investigation into the effect of suspension configurations on the performance of tracked vehicles traversing bump terrains[J]. Vehicle System Dynamics, 2014, 52(7): 969-991.
|
|
|
| [5] |
MIAO Y, WANG G, RUI X. Dynamics modeling, simulation, and optimization of vibration characteristics of the tracked vehicle system[J]. Journal of Vibration and Control, 2021, 27: 2451-2465.
|
|
|
| [6] |
朱兴高,顾亮.履带车辆行驶速度对负重轮动位移的影响[J].东北大学学报(自然科学版),2016,37(4):548-553. doi:10.3969/j.issn.1005-3026.2016.04.020
ZHU X G, GU L. Effect of tracked vehicle speed on bogie wheels' dynamic displacement[J]. Journal of Northeastern University (Natural Science), 2016, 37(4): 548-553.
doi: 10.3969/j.issn.1005-3026.2016.04.020
|
|
|
| [7] |
张新,王亚飞,秦强,等.履带式矿用挖装机负重轮仿真研究[J].煤矿机械,2021,42(12):34-37.
ZHANG X, WANG Y F, QIN Q, et al. Simulation research on load-bearing wheel of crawler mining excavator[J]. Coal Mine Machinery, 2021, 42(12): 34-37.
|
|
|
| [8] |
LI Y L, TANG C. Research on coupled dynamic model of tracked vehicles and its solving method[J]. Mathematical Problems in Engineering, 2015, 2015(1): 293125.
|
|
|
| [9] |
孟磊,李晓雷,邱实,等.履带对履带车辆车体振动影响的分析[J].车辆与动力技术,2015,140(4):1-5,41.
MENG L, LI X L, QIU S, et al. Influence analysis of tracks on body vibration for a tracked vehicle[J]. Vehicle & Power Technology, 2015, 140(4): 1-5, 41.
|
|
|
| [10] |
DCHOI J H, LEE H C, SHABANA A A. Spatial dynamics of multibody tracked vehicles part I: spatial equations of motion[J]. Vehicle System Dynamics, 1998, 29(1): 27-49.
|
|
|
| [11] |
乔新勇,靳莹,段誉.基于履带环影响和功率谱方法的履带车辆振动响应分析[J].振动与冲击,2021,40(18):94-101. doi:10.13465/j.cnki.jvs.2021.18.013
QIAO X Y, JIN Y, DUAN Y. Tracked vehicle vibration response analysis based on power spectrum method in consideration of the influence of track circuit[J]. Journal of Vibration and Shock, 2021, 40(18): 94-101.
doi: 10.13465/j.cnki.jvs.2021.18.013
|
|
|
| [12] |
李春明,吴维,郭智蔷,等.履带车辆纵向与垂向耦合动力学模型及功率特性[J].兵工学报,2021,42(3):449-458. doi:10.3969/j.issn.1000-1093.2021.03.001
LI C M, WU W, GUO Z Q, et al. Longitudinal and vertical coupled dynamic model and power characteristics of tracked vehicle[J]. Acta Armamentarii, 2021, 42(3): 449-458.
doi: 10.3969/j.issn.1000-1093.2021.03.001
|
|
|
| [13] |
朱兴高,陈凤熹,张宁,等.某型履带车辆悬挂系统非线性振动特性研究[J].农业装备与车辆工程,2017,55(7):40-43. doi:10.3969/j.issn.1673-3142.2017.07.010
ZHU X G, CHEN F X, ZHANG N, et al. Study on nonlinear vibration of tracked vehicle suspension system[J]. Agricultural Equipment & Vehicle Engineering, 2017, 55(7): 40-43.
doi: 10.3969/j.issn.1673-3142.2017.07.010
|
|
|
| [14] |
BANERJEE S, BALAMURUGAN V, KRISHNAKUMAR R. Ride dynamics mathematical model for a single station representation of tracked vehicle[J]. Journal of Terramechanics, 2014, 53(6): 47-58.
|
|
|
| [15] |
殷珺,陈辛波,吴利鑫,等.滤波白噪声路面时域模拟方法与悬架性能仿真[J].同济大学学报(自然科学版),2017,45(3):398-407. doi:10.11908/j.issn.0253-374x.2017.03.014
YIN J, CHEN X B, WU L X, et al. Simulation method of road excitation in time domain using filtered white noise and dynamic analysis of suspension[J]. Journal of Tongji University (Natural Science), 2017, 45(3): 398-407.
doi: 10.11908/j.issn.0253-374x.2017.03.014
|
|
|
| [16] |
MITSCHKE M, WALLENTOWITZ H.汽车动力学[M]. 5版.陈荫三,余强,译.北京:清华大学出版社,2019.
MITSCHKE M, WALLENTOWITZ H. Dynamics of motor vehicles[M]. 5th ed.Translated by CHEN Y S,YU Q. Beijing: Tsinghua University Press, 2019.
|
|
|
| [17] |
丁法乾.履带式装甲车辆悬挂系统动力学[M].北京:国防工业出版社,2004:49-57.
DING F Q. Dynamics of tracked armored vehicle suspension system[M]. Beijing: National Defense Industry Press, 2004: 49-57.
|
|
|
| [18] |
刘国辉,郝称意,李民赞,等.半主动悬架山地拖拉机姿态控制系统设计与仿真[J].农业机械学报,2022,53():338-348.
LIU G H, HAO C Y, LI M Z, et al. Attitude control simulation of mountain tractor based on semi-active suspension[J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(): 338-348.
|
|
|
| [19] |
黄志强,郑旺辉.MATLAB实现ADAMS三维随机路面建模[J].现代防御技术,2018,46(3):165-170. doi:10.3969/j.issn.1009-086x.2018.03.025
HUANG Z Q, ZHENG W H. Modeling of ADAMS 3D random road with MATLAB[J]. Modern Defence Technology, 2018, 46(3): 165-170.
doi: 10.3969/j.issn.1009-086x.2018.03.025
|
|
|
| [20] |
李雨潭,李猛钢,朱华.煤矿搜救机器人履带式行走机构性能评价体系[J].工程科学学报,2017,39(12):1913-1921.
LI Y T, LI M G, ZHU H. Performance evaluation system of the tracked walking mechanism of a coal mine rescue robot[J]. Chinese Journal of Engineering, 2017, 39(12): 1913-1921.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|