

路内违法停车(简称违停)是指车辆停放在交通法规禁止的路段[1]. 随着机动化的发展,因路外停车设施不足及路内停车的便利性,违停问题日益严重,严重扰乱了道路交通秩序. 目前,路内停车管理多采用违停执法的事后管理模式,缺乏对违停产生空间源头的事前分析. 有必要系统研究违停产生的空间机制,从前端空间优化上减少路内违停现象,提高道路交通效率和出行者的满意度.
关于违法停车的理论研究,早期的探索主要集中在其负面影响的分析上[2]. Galatioto等[3-6]的研究结果表明,违停对交通安全、效率、污染及出行满意度等多个方面产生了显著影响,这凸显了治理违停的重要性. 深入探讨违停的内在机理显得尤为重要. Zhou等[1]研究表明,土地利用、停车系统及街道设计是影响违停的主要环境因素. Perez[7]的实证研究发现,城市街道的几何特征对违停数量有显著影响,交通负荷较低的宽阔街道往往吸引更多的违停行为. Gao等[8]对纽约市路边停车进行建模,结果显示,商业用地使用率高、酒店数量多以及街区长度较长都会增加违停的可能性. Thanh等[9]研究越南河内市中心的80条道路发现,约30%存在违停现象,而造成这一现象的主要原因是该地区的临街商业活动. 此外,停车费用、停车后的步行距离及路网运行情况等因素也是影响违停的重要因素[10]. 在研究方法上,由于停车罚单的数据量庞大,很多研究都基于这些数据展开. 早期违停需求预测常用的回归方法包括负二项回归和泊松回归[11-12]. 为了解决违停罚单数据的偏倚问题,空间回归分析逐渐被引入,如Zhou等[1]利用地理加权回归进行违停需求分析. 贝叶斯分位数回归[13]、贝叶斯分层时空模型[14]开始在违停研究中得到应用.
综上所述,现有研究虽然从多角度探讨了违停影响因素,但仍存在不足. 1)土地利用测度多依赖兴趣点(point of interest,POI),难以反映用地规模. 2)缺乏对减轻违停的有效措施范围界定. 3)机器学习模型中缺乏特征选择与超参数优化的协同方法,影响模型稳健性,尤其是在特征数量较多的场景下.
本文利用违停监控设备所采集的违停数量数据,结合该区域的特征与相关研究,构建建成环境影响因素的框架. 引入兴趣面(areas of interest,AOI)数据刻画用地规模,利用POI、路网与现场调研等数据刻画街道及其他建成环境特征. 为了解决参数优化与特征选择的问题,构建利用粒子群优化(particle swarm optimization,PSO)算法优化超参数与特征数量的极限梯度提升算法(extreme gradient boosting,XGBoost)模型,采用Shapley加性解释方法(Shapley additive explanation, SHAP)分析不同时域内违停数量与建成环境影响因素之间的非线性关系,支持更精细化的违停治理.
1. 研究区域与数据
1.1. 违停数据
图 1
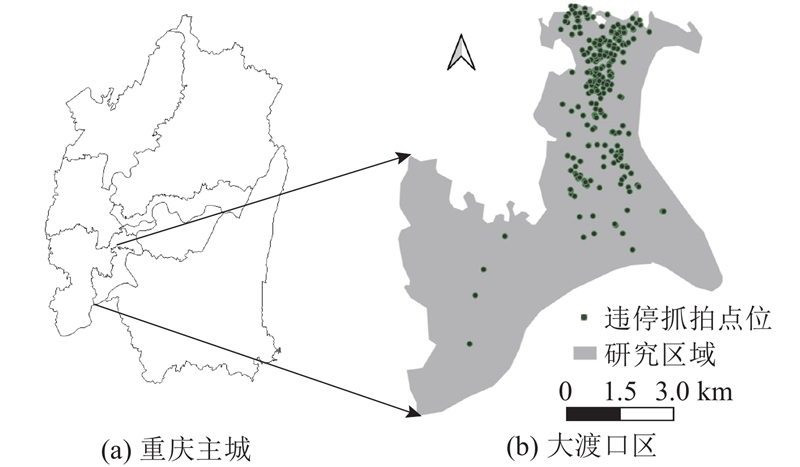
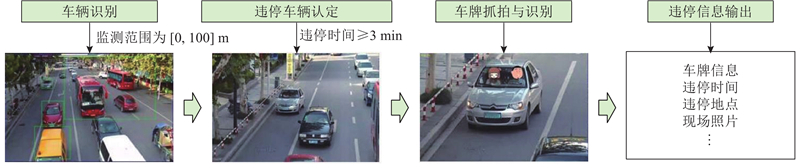
图 2
研究数据总量为41 344条,时间跨度为2023年1月1日至2023年2月28日. 春节假期所对应的数据已被排除,作为本研究的核心分析数据,数据示例如表1所示. 每个违停抓拍点被视作违停数量统计的基本单元.
表 1 违法停车数据示例
Tab.1
| 序号 | 号牌种类 | 违法日期 | 违法时间 | 违法地址 |
| 1 | 小型汽车 | 2023-01-01 | 17:07:40 | 金湾路太平洋影城路段违停 |
| 2 | 小型汽车 | 2023-01-01 | 17:08:24 | 松青路大渡口小学路段违停 |
| 3 | 小型汽车 | 2023-01-01 | 17:09:04 | 凤祥路北段华宇观澜华府路段违停 |
| | | | | |
| XX | 小型汽车 | 2023-02-28 | 23:23:52 | 九中路路段违停 |
1.2. POI与AOI数据
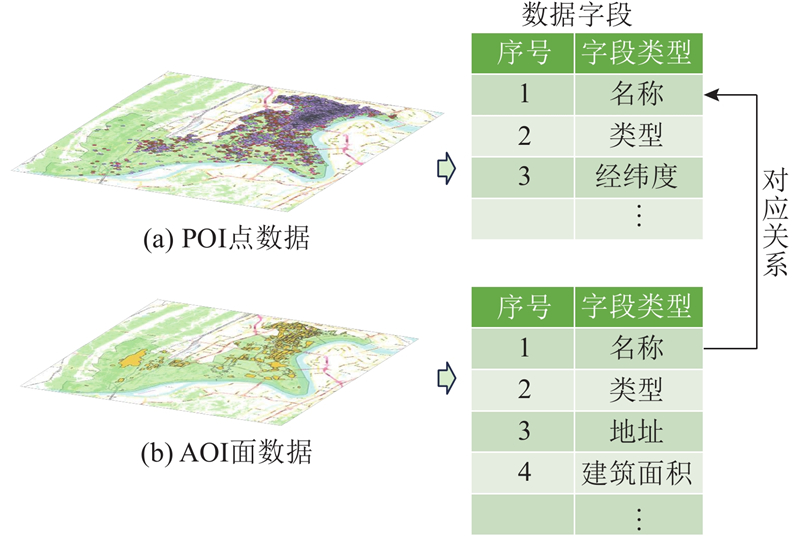
POI具有丰富的地理空间语义,可以反映区域业态属性,通过空间匹配可以提取沿街业态分布特征. AOI是POI的空间实体化,指地图中的区域状地理单元,其中AOI数据中的建筑类型和面积可以揭示用地体量.
使用的POI数据来自高德平台(2022年10月,重庆市大渡口区),包含名称、经纬度、类型等信息,共22 584条,分为23类. AOI数据来自高德地图接口(2022年10月),与POI的类别一致,含位置、类型、面积等字段,共543条. 与仅含点位信息的POI相比,AOI更能反映区域用地性质与体量. POI与AOI的特征如图3所示.
图 3
2. 模型构建
2.1. 变量选取
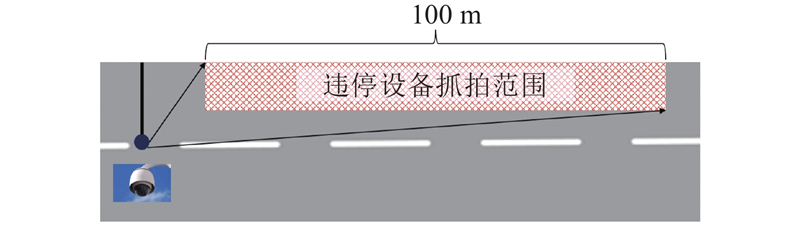
各地点的违停数量是借助违停抓拍设备进行统计的. 考虑到所有设备均使用高位电子监控系统,且监控范围保持一致,如图4所示,各地点的违停数据具备可比性,并可作为被解释变量纳入分析. 针对解释变量的选取,结合现有研究,从3个方面考虑,分别为土地利用特征、交通供给特征与道路设计特征.
图 4
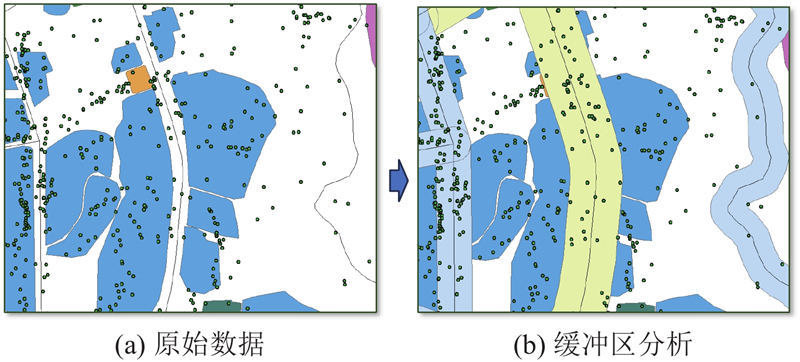
在测度方面,土地利用涵盖用地性质、开发强度和沿街业态. 构建POI与AOI融合的测度体系:POI反映业态特征,AOI表征用地规模. 为了更准确地提取沿街业态,通过缓冲区分析筛选POI,即依据道路等级在道路中线外设定60、50与40 m缓冲区,分别对应主干路、次干路与支路,将缓冲区范围内POI作为街道业态的代表性指标(见图5). 其中用地特征指标包含商务住宅AOI面积、公司企业AOI面积、购物服务AOI面积、休闲娱乐AOI面积、医疗AOI面积、学校AOI面积,单位为平方米/单元;街道特征指标包含公司企业POI数量、休闲娱乐POI数量、餐厅POI数量、购物服务POI数量、生活服务POI数量.
图 5
2.2. 机器学习模型的构建
为了探究建成环境因素对违停数量的影响关系,在兼顾模型复杂度与解释性的基础上,选用机器学习方法中的XGBoost模型作为分析工具. XGBoost是对传统GBDT模型的扩展与优化,融合多种改进策略与技术手段[16]. 考虑到此类集成学习模型的参数空间较庞大,引入PSO算法,对XGBoost的超参数与输入特征进行自动化优化搜索.
XGBoost算法通过对损失函数进行二阶泰勒展开,并在模型中加入正则化项,在提升整体拟合效果的同时,有效控制模型复杂度,从而增强模型的泛化能力[17]. 设定数据集包含n个样本,具体如下所示:
变量
式中:
式中:
在样本确定的情况下,模型超参数的设置与输入特征的不同会极大地影响模型的精度. 由于特征数量较多而样本数量较少,且集成学习的超参数搜索空间较大,为了提高搜索效率,采用PSO算法,对XGBoost模型的超参数与输入特征进行优化.
针对PSO算法,在
综上分析,PSO-XGBoost模型的求解步骤如下.
1)整理违停数量及影响因素数据.
2)按7∶3的比例划分训练集与测试集,训练集采用五折交叉验证,以均方误差(mean squared error,MSE)为适应度函数,初始化粒子个体与全局最优值.
3)训练XGBoost模型并迭代更新粒子,获得最优超参数与特征数量.
4)将最优参数用于模型的测试重训,通过R2、平均绝对误差(mean absolute error, MAE)、均方根误差(root mean square error,RMSE)对模型进行评价.
5)采用SHAP解释模型,分析特征对预测结果的边际贡献,SHAP模型的相关公式可以参考文献[18].
3. 结果分析
3.1. 数据描述性分析和模型拟合效果的检验
表 2 样本描述性统计
Tab.2
| 指标 | 最小值 | 最大值 | 均值 | VIF |
| 商务住宅AOI面积 | 4.01 | |||
| 公司企业AOI面积 | 0.00 | 2.90 | ||
| 购物服务AOI面积 | 0.00 | 1.57 | ||
| 休闲娱乐AOI面积 | 2.25 | |||
| 医疗AOI面积 | 0.00 | 1.28 | ||
| 学校AOI面积 | 0.00 | 2.18 | ||
| 公司企业POI数量 | 1.00 | 58.00 | 23.23 | 2.51 |
| 休闲娱乐POI数量 | 0.00 | 52.00 | 12.23 | 4.20 |
| 餐厅POI数量 | 3.00 | 411.00 | 123.13 | 7.46 |
| 购物服务POI数量 | 23.00 | 721.44 | 2.98 | |
| 生活服务POI数量 | 5.00 | 326.00 | 104.79 | 6.26 |
| 路内停车设施距离 | 6.00 | 994.00 | 475.67 | 4.18 |
| 路外公共停车设施距离 | 0.00 | 998.00 | 494.39 | 4.04 |
| 公共交通线路数量 | 0.00 | 10.00 | 2.31 | 2.89 |
| 距离市中心的距离 | 50.00 | 3.25 | ||
| 双向车道数量 | 2.00 | 8.00 | 4.52 | 2.74 |
| 是否具有中央分隔设施 | 0.00 | 1.00 | 0.47 | 7.07 |
| 是否具有人行护栏 | 0.00 | 1.00 | 0.51 | 7.35 |
鉴于工作日动静态交通冲突更突出,选取工作日4个典型时段(8:00—9:00、12:00—13:00、18:00—19:00、22:00—23:00)的违停数据,构建模型. 模型采用Python Scikit-learn实现,结合PSO算法优化XGBoost的超参数与特征. PSO算法的寻优过程通过pyswarms包中的GlobalBestPSO功能实现. 将PSO算法的粒子数量设为50,迭代次数设为50,认知权重、社会权重与惯性权重分别设置为2、2、0.4,其中认知权重、社会权重设置为2是经典的默认设置,惯性权重取0.4则使得算法在全局搜索与局部搜索之间达到较优平衡.
图 6
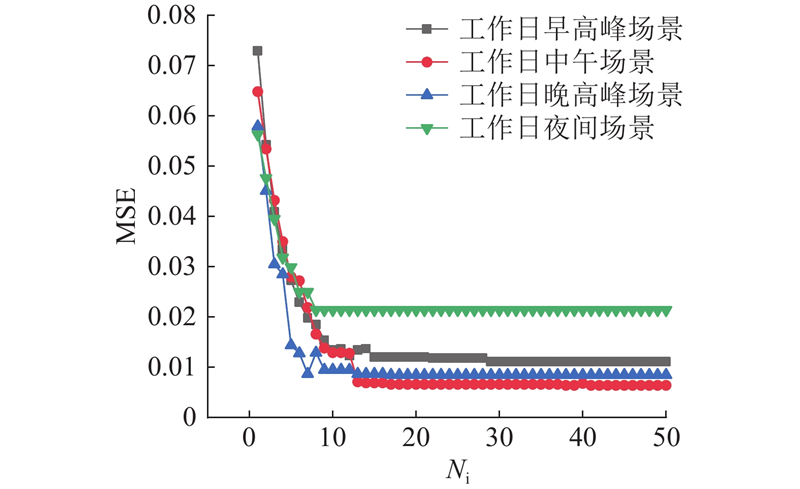
图 6 不同预测场景下PSO中参数优化迭代过程
Fig.6 Iterative process of parameter optimization in PSO under different prediction scenario
表 3 不同预测场景下建成环境与违停数量建模结果
Tab.3
| 预测对象 | d | η | k | 剔除的 特征 | R2 | MAE | RMSE |
| 早高峰(8:00—9:00) 违停数量 | 4 | 0.10 | 300 | 0.92 | 0.58 | 1.31 | |
| 中午(12:00—13:00) 违停数量 | 7 | 0.20 | 268 | 0.91 | 0.53 | 1.44 | |
| 晚高峰(18:00—19:00) 违停数量 | 2 | 0.05 | 170 | 0.92 | 0.56 | 1.42 | |
| 夜间(22:00—23:00) 违停数量 | 3 | 0.06 | 400 | 0.95 | 0.39 | 1.17 |
为了论证本文方法的先进性,在与支持向量机(support vector machine, SVM)、随机森林(random forest, RF)及梯度提升回归树(gradient boosting regression tree, GBRT)等常用机器学习模型进行对比的基础上,引入PSO算法,检验PSO算法在与不同机器学习模型结合中的作用.
模型拟合效果如图7所示,当各模型未引入超参数寻优PSO时,本文方法在3项评价指标上均优于其他基准模型. 在采用PSO进行参数与特征优化后,各方法的拟合效果均有所提升,其中PSO-XGBoost模型在预测精度与稳定性方面表现最优,显著优于其余模型及其PSO优化版本,验证了本文方法在多源数据融合建模中的有效性与适用性.
图 7
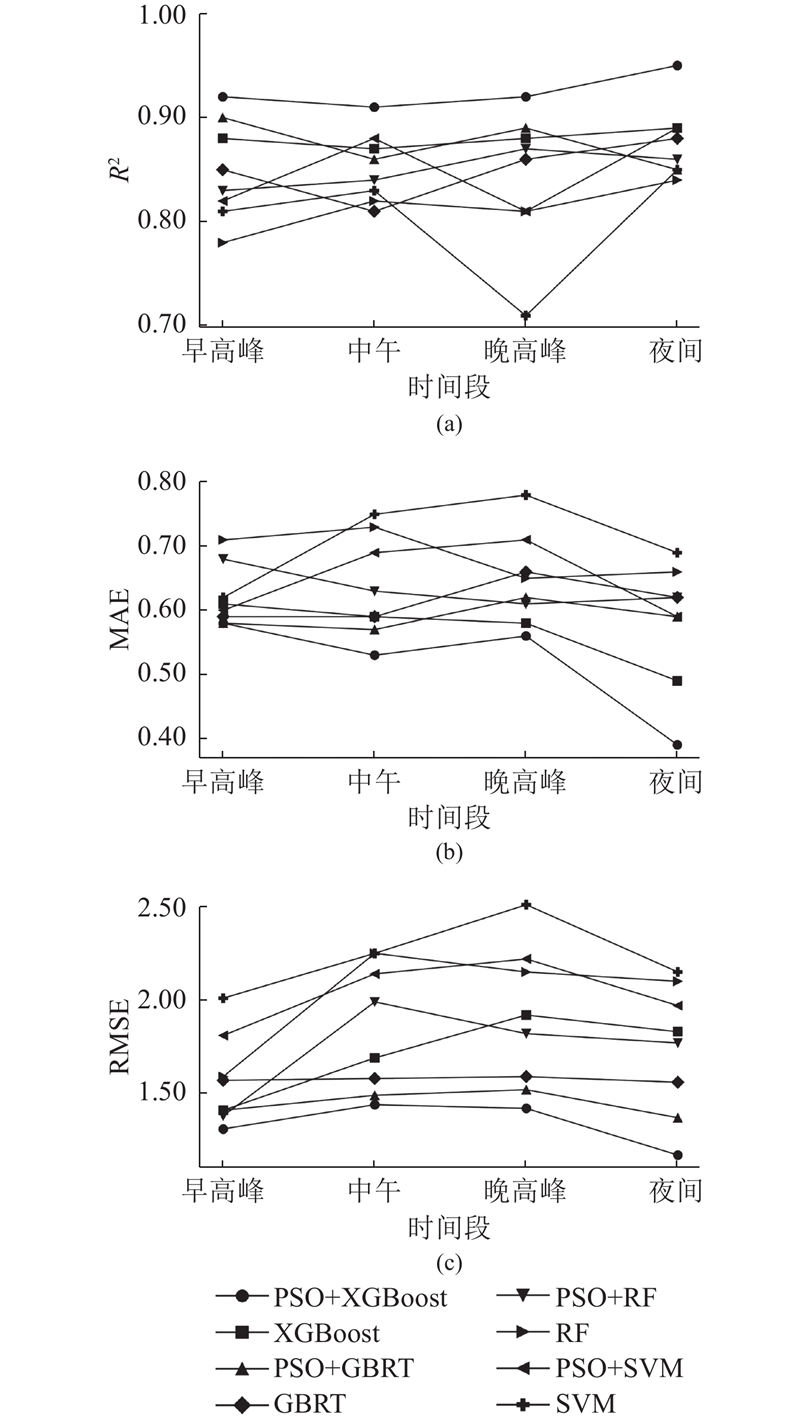
图 7 不同场景与方法下建成环境与违停数量建模结果的对比
Fig.7 Comparison of modeling result of built environment and illegal parking quantity under different scenario and method
3.2. 影响因素解释性分析
利用Python的SHAP包对样本建成环境特征的贡献度进行解释,通过可视化不同样本中不同特征的SHAP值,分析不同时间段违停数量的影响因素及非线性关系.
3.2.1. 全局重要性分析
计算4个典型时段的SHAP值,展示前12个特征的重要性,如图8所示. 结果显示,公交线路数量、距市中心距离、中央分隔设施和人行护栏与违停数量负相关,其余特征多为正相关. 不同时间段的影响因素差异显著:早高峰(8:00—9:00)主要受公交线路数量影响;中午(12:00—13:00)餐饮POI与学校AOI面积对违停影响最大;晚高峰(18:00—19:00)餐饮与企业影响突出;夜间(22:00—23:00)则以停车设施供给为主要影响因素. 总体来看,随着时间推移,违停逐渐向市中心聚集.
图 8
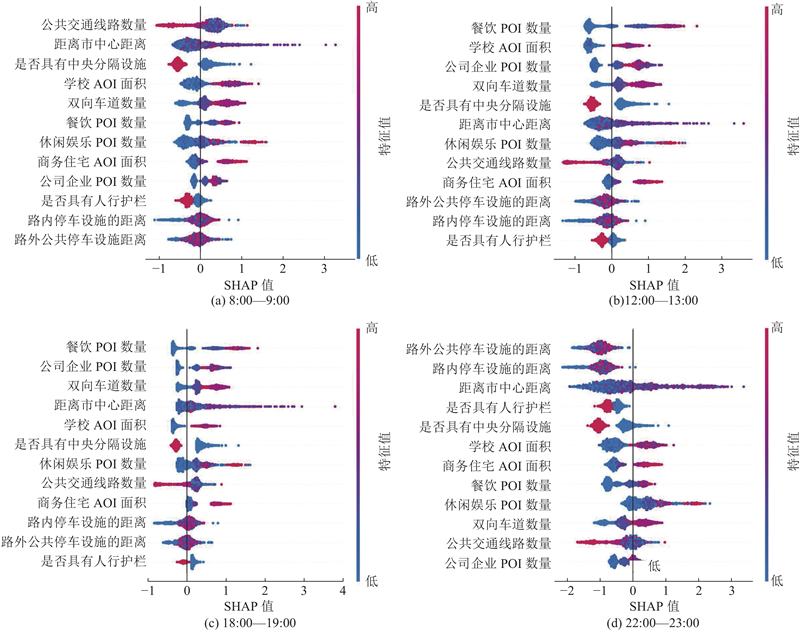
图 8 工作日不同时段模型的SHAP解释分析
Fig.8 SHAP interpretation analysis of model at different period on weekday
3.2.2. 单因素归因分析
图 9
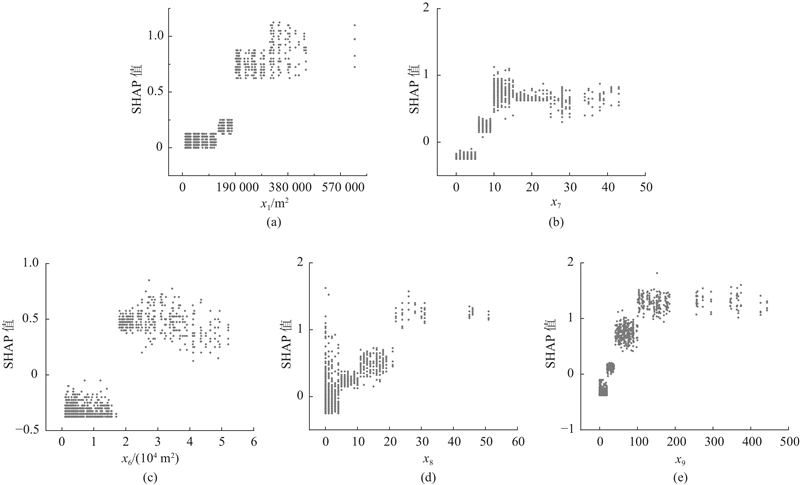
图 9 工作日晚高峰场景下区域土地利用属性的单变量SHAP图
Fig.9 Univariate SHAP plot of regional land use attribute under weekday evening peak scenario
图 10
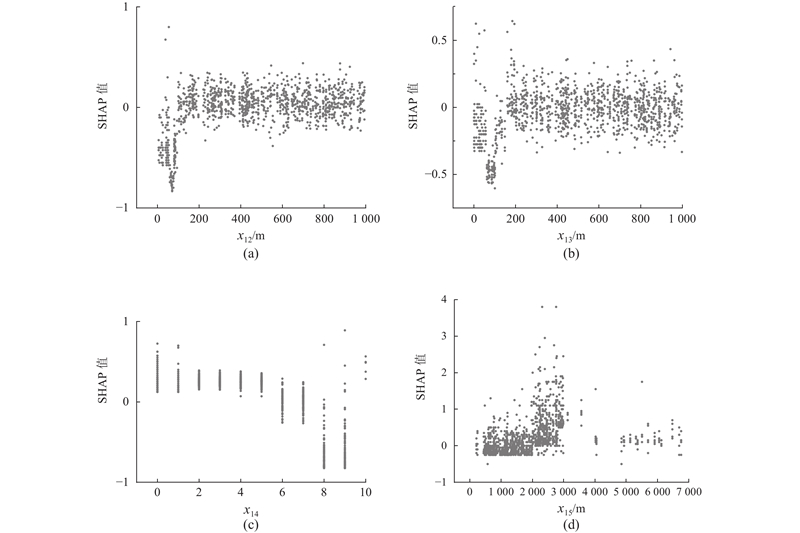
图 10 工作日晚高峰场景下交通供给特征的单变量SHAP图
Fig.10 Univariate SHAP plot of traffic supply characteristic under weekday evening peak scenario
如图9(a)所示,当商务住宅AOI面积为19~35万m2/单元时,商务住宅AOI面积对路内违停具有显著的促进作用,该区域存在较高的违停风险. 当商务住宅AOI面积小于19万m2/单元或大于35万m2/单元时,商务住宅AOI面积对违停的诱增幅度较小. 由于建成环境指标地测度范围具有一致性,且老旧小区普遍占地面积较小,结合研究区域的用地现状,商务住宅建筑面积位于中间值反映出老旧小区较多,而由于老旧小区的配建指标不足,导致停车需求的外溢. 超过35万m2/单元的区域往往是建成年限较短(小于10 a)的小区,停车配建数较充足.
如图9(b)所示,当公司企业POI数量为10~15时,公司企业POI数量对违停数量的促进作用最大,说明公司企业POI数量对违停的影响存在中间区间. 结合公司企业的空间分布规律可知,低于10个或高于15个公司企业数量的违停区域往往在城市外围区域或企业聚集区域,这些区域用地类型较单一,研究时间段属于交通发生点,而非吸引点.
学校AOI面积数值越大,越容易诱导违停. 当学校AOI面积超过1.8万m2/单元时,学校AOI面积对违停的影响具有显著增强的关系(见图9(c)),说明学校聚集区域晚高峰违停较严重. 由于晚高峰与学校放学时间存在部分重合,当学校数量较多的时候,停车需求在时空中较集中,尤其是路内短时停车需求. 虽然学校周边划分了部分临停车位,但由于数量有限,仍无法满足停车需求,导致违停数量较大.
休闲娱乐POI数量与餐饮POI数量越多,对违停数量的贡献越高. 其中的关键提升点分别为21、42(见图9(d)、(e)). 两者大多属于沿街业态,而中国没有针对具体沿街业态的停车规划,这导致后期只能通过建设公共停车场与路内停车位进行补充,而受老城区用地使用空间有限的约束,效果不理想.
路内停车设施距离与路外公共停车设施距离越小,停车设施对违停数量具有一定的抑制作用. 其中,路内停车设施距离与路外公共停车设施距离需要分别小于150、200 m,才能有效地抑制违停,如图10(a)、(b)所示.
当违停点位与市中心的距离为2~4 km时,对违停的促进作用越强,而距离市中心更近或更远,违停数量开始减少,说明违停具有明显的空间分异特征(见图10(d)). 这可能是由于市中心区域交通流量较大且停车管理严格,而外围区域停车供给较充足,违停数量较少.
图 11
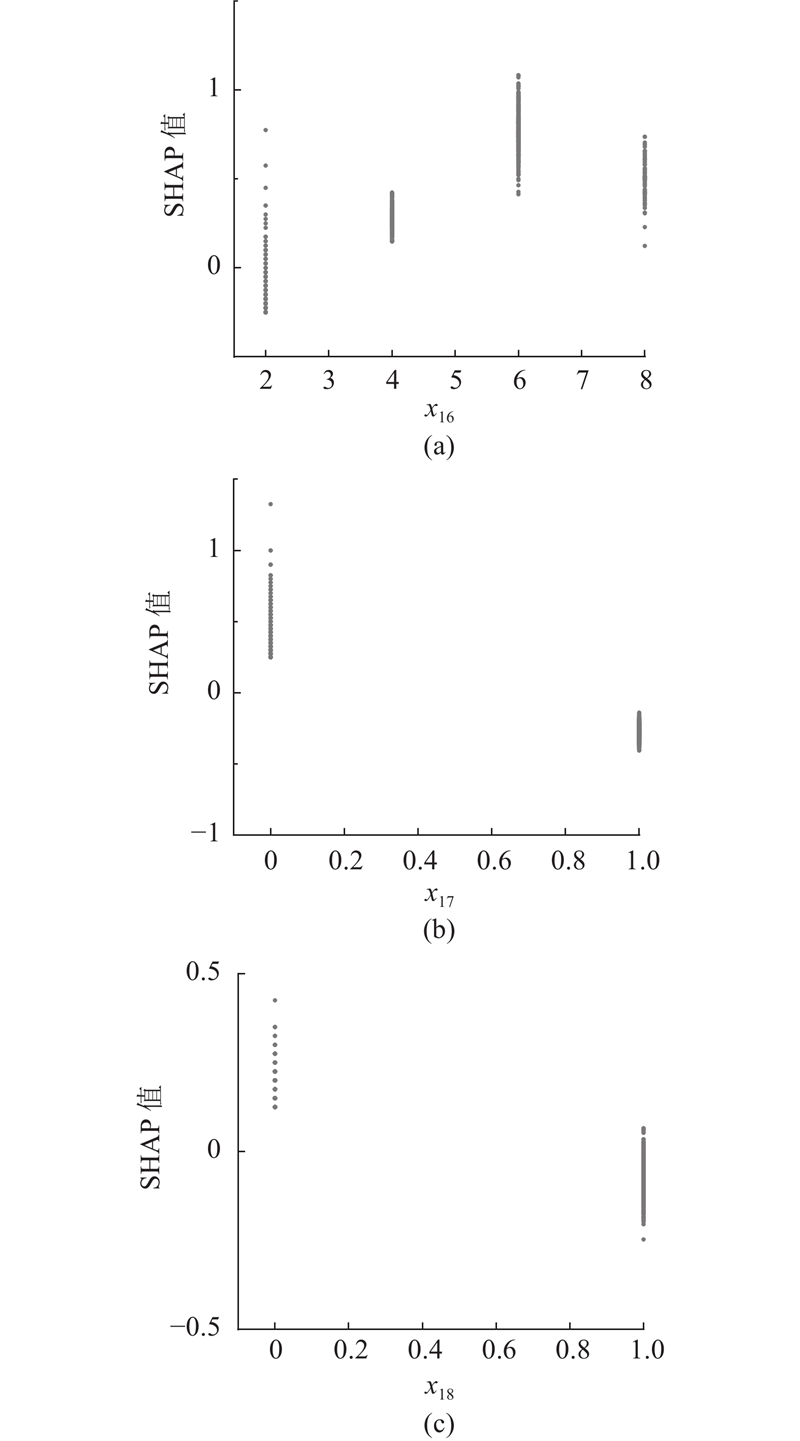
图 11 工作日晚高峰场景下道路设计特征的单变量SHAP图
Fig.11 Univariate SHAP plot of road design characteristic under weekday evening rush hour scenario
4. 结 论
(2)SHAP归因分析显示,通过优化混合用地开发并合理控制不同功能要素的空间比例,可以在时间维度上分散停车需求,促进停车供需平衡并抑制违停. 从交通供给角度来看,路内停车设施与路外公共停车设施距离分别控制小于150 m和200 m时对违停的抑制作用最显著. 考虑违停抓拍设备的监测范围为[0,100] m,上述阈值在±50 m范围内仍具有有效性. 相较于我国现行规范中300 m的停车服务范围,该结果表明在山地城市这类步行成本较高的地区有必要进行适度调整[24]. 当公共交通线路数量超过5条时,公共交通线路数量对违停具有明显的抑制作用,但效果受公交服务水平、末端接驳条件及出行习惯等因素影响,因此须通过优化线路布局、提升服务质量与改善接驳条件等综合措施,强化公共交通对违停行为的引导作用.
受限于篇幅与数据限制,本研究仅是对违停的外部影响因素的初步探索,未来的研究可以进一步从以下方向进行优化.
(1)从研究对象来看,探讨工作日、周末以及不同时段情境下建成环境因素对违停行为的影响差异,有助于更全面地认识违停的时空影响关系.
(2)从研究视角来看,未来研究可以结合宏观层面的城市规划因素、交通政策以及微观层面的个体出行偏好和行为特征,更全面、系统地揭示违停产生机理.
(3)从研究方法来看,未来可以引入因果推断方法,对不同城市的违停数据进行建模与比较分析,推动违停研究从影响关系的统计关联拓展至因果机制的识别与验证.
参考文献
Spatial heterogeneity of urban illegal parking behavior: a geographically weighted Poisson regression approach
[J].DOI:10.1016/j.jtrangeo.2023.103636 [本文引用: 5]
Illegal parking and the enforcement of parking regulations: causes, effects and interactions
[J].DOI:10.1080/01441649208716803 [本文引用: 1]
The effects of on-street parking and road environment visual complexity on travel speed and reaction time
[J].
A study on plan to improve illegal parking using big data
[J].DOI:10.17485/ijst/2015/v8i21/78274
Parking demand and responsiveness to supply, pricing and location in the Sydney central business district
[J].DOI:10.1016/S0965-8564(99)00054-3 [本文引用: 1]
Illegal parking in urban streets: connection with the geometric characteristics and its mitigation through traffic calming measures
[J].
Legalizing the illegal parking, a solution for parking scarcity in developing countries
[J].DOI:10.1016/j.trpro.2017.05.374 [本文引用: 1]
A study on the analysis effect factors of illegal parking using data mining techniques
[J].DOI:10.12815/kits.2014.13.4.063 [本文引用: 1]
Analysis of factors that affect the frequency of truck parking violations in urban areas
[J].
Exploring the spatial dependence and selection bias of double parking citations data
[J].DOI:10.1177/0361198118792323 [本文引用: 1]
城市路内违章停车时空特征及影响因素作用模型
[J].DOI:10.16097/j.cnki.1009-6744.2024.02.024 [本文引用: 2]
Spatio-temporal characterization of urban on-street illegal parking and modeling of role influencing factors
[J].DOI:10.16097/j.cnki.1009-6744.2024.02.024 [本文引用: 2]
Spatio-temporal heterogeneity in street illegal parking: a case study in New York
[J].DOI:10.1016/j.jtrangeo.2025.104262 [本文引用: 1]
A deep learning approach to real-time parking occupancy prediction in transportation networks incorporating multiple spatio-temporal data sources
[J].DOI:10.1016/j.trc.2019.08.010 [本文引用: 2]
建成环境对共享单车使用特征的非线性影响研究
[J].DOI:10.16097/j.cnki.1009-6744.2024.02.022 [本文引用: 1]
Exploring nonlinear effects of built environment on dockless bike sharing usage
[J].DOI:10.16097/j.cnki.1009-6744.2024.02.022 [本文引用: 1]
建成环境对共享单车时间集聚模式的非线性影响
[J].
Nonlinear influence of built environment on temporal aggregation modes of shared bicycles
[J].
Applying gradient boosting decision trees to examine non-linear effects of the built environment on driving distance in Oslo
[J].DOI:10.1016/j.tra.2018.02.009 [本文引用: 1]
Nonlinear effects of community built environment on car usage behavior: a machine learning approach
[J].
Exploring nonlinear built environment effects on driving with a mixed-methods approach
[J].DOI:10.1016/j.trd.2022.103443 [本文引用: 1]
The relationship between norms, satisfaction and public transport use: a comparison across six European cities using structural equation modelling
[J].DOI:10.1016/j.tra.2019.05.016 [本文引用: 1]
Can continued anti-epidemic measures help post-COVID-19 public transport recovery? evidence from Taiwan
[J].DOI:10.1016/j.jth.2022.101392 [本文引用: 1]
A reservation and allocation model for shared-parking addressing the uncertainty in drivers’ arrival/departure time
[J].DOI:10.1016/j.trc.2021.103484 [本文引用: 2]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}