

已有的AGV任务调度研究通过合理的任务执行顺序规划完成给定任务,以优化AGV任务调度方案,同时在不同程度上考虑AGV的作业约束. Zhang等[3]针对给定的单AGV和一组运输任务(预设起点任务和终点任务固定),研究确定最优AGV路线的路径规划问题. De Ryck等[13]针对AGV作业过程中的充电问题,扩展了经典的旅行商问题(traveling salesman problem,TSP)模型,使得访问节点数量可变,从而将充电站纳入指定的站点行程. 高文文等[14]针对岸桥卸船作业中的AGV路径优化,考虑任务之间的偏序关系,建立混合整数规划模型进行求解,实现了较短时间内的可行解搜索. 祁璇等[15]针对生产车间内的AGV路径规划与任务调度问题,提出基于改进近端优化策略算法的单AGV 多任务调度优化方法,避免了AGV空载或回程路线的浪费. 上述研究较少考虑任务执行顺序的限制,任务需求 (如任务访问节点、任务节点距离)多是静态的.
本文结合实际问题的业务需求,研究特定生产系统中单辆单载AGV在生产线和仓库之间运输托盘和成品工件的调度优化问题,旨在提供最大程度最小化AGV行驶总距离的优化调度方案. 调度方案的制定涉及任务选择策略和任务执行顺序规划. 在规划顺序限制的条件下,任务需求(起点、终点和到达时刻)随环境动态(工作点的托盘数量)变化. 建立基于有向无环图建模的动态旅行商问题(dynamic traveling salesman problem model based on directed acyclic graph modeling,DAGDTSP)模型,提出改进遗传算法(improved genetic algorithm,IGA)进行模型求解. 此外,考虑到任务选择策略多样性对优化调度方案求解的影响,提出基于二进制粒子群优化(binary particle swarm optimization,BPSO)的嵌套算法框架(以下简称为“BPSO嵌套框架”). 基于随机生成的测试问题,通过实验验证所提方法的性能.
1. 问题描述
本文研究课题源于一家国内专业从事联轴器研发与制造的大型骨干企业. 该企业新建联轴器自动生产线,实现原料存储、生产加工和物流流转的自动化及生产管理的数字化. 机器人将工件从机器转移到仓库下料点后,AGV负责联轴器成品从生产线到仓库的运输和存储管理.
如图1所示为网络拓扑图,单载AGV在仓库区域运输托盘和工件,任意2个拓扑点之间存在唯一的最短路径,节点距离由拓扑图中边的权重表示. AGV在完成配送物料的一次性装载后,直接将物料运输到目的地. 定义AGV执行的出库任务为AGV将下料区的盛有工件的托盘运输到成品存储区,定义入库任务为AGV将空托盘区的空托盘运输至无托盘放置的下料点. 出库任务由工件加工完成所触发,即每一个工件的加工完成意味着一个出库任务到达. 在执行运输任务的过程中,AGV从充电点出发,在完成所有任务后停留在邻近高速点. AGV运输时应满足作业约束:AGV在下料点完成一次出库任务后,需要在下一个工件到达该点前,通过执行入库任务补充空托盘,以保证到达该点的后续工件被托盘盛放.
图 1
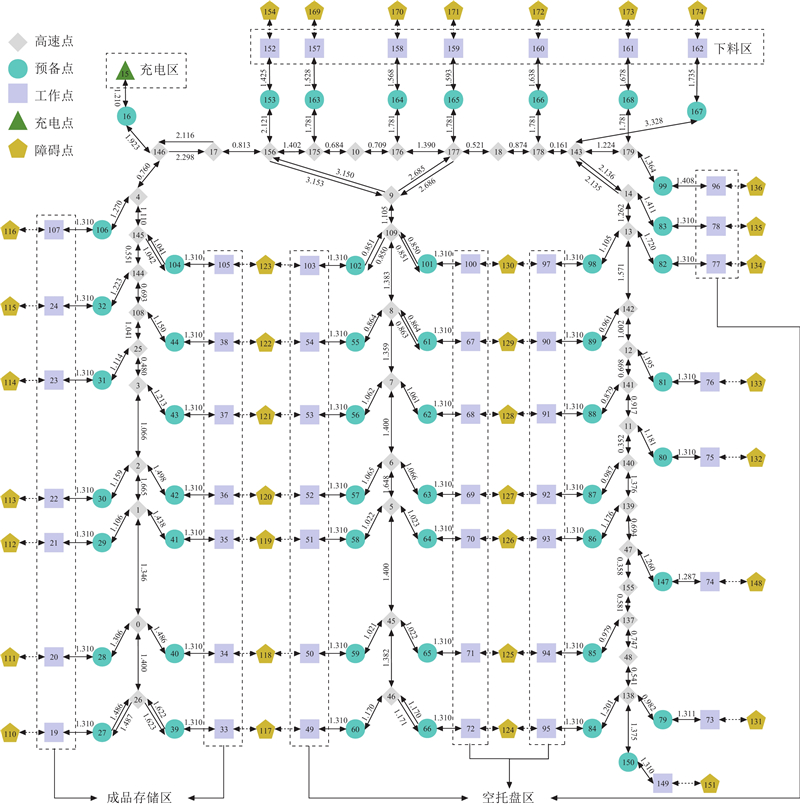
本文研究的问题如下:在工件的批量生产过程中,已知由工件加工完成所触发的多个出库任务的起点和到达时刻,为单辆单载AGV的任务调度提供优化调度方案,包括AGV待执行任务的起点、终点和开始执行时刻等信息. 优化调度方案以最小化AGV的行驶总距离为优化目标进行求解,保证AGV在执行任务的过程中满足作业要求,以避免引发生产事故. 除上述描述外,本文研究还基于以下假设条件.
式中:
2. 问题建模
调度方案的制定要求确定任务选择策略(给定AGV待执行的一组运输任务),以最小化AGV行驶总距离为目标,规划AGV执行给定任务的顺序,求解优化调度方案. 在一次连续的批量生产过程中,记任务集合
2.1. 任务选择策略
托盘可以容纳多个工件,故AGV不需要在每个工件完成后都执行一次出库操作. 记下料区的工作点数量为
为了最小化AGV在下料区每个工作点执行的出库任务数量,基准任务选择策略并非唯一的策略. 为了说明最小化待执行出库任务数量的原则下任务选择策略的多样性,记
基于限制条件(7)、(8),构建
式中:
2.2. DAGDTSP模型
DAGDTSP模型中的任务节点信息随环境动态变化. 这是因为随着AGV作业的进行,仓库成品存储区点位所堆放的托盘数量增至最大限额,空托盘区点位的空托盘数量减少为零,导致出库任务终点和入库任务起点的选择受限,影响AGV执行任务和转移至后续任务的行驶距离. 将任务选择策略给定的待执行任务集合
式中:
对于入库任务
式中:
在
对于将
将
式中:
3. 算法设计
基于对DAGDTSP模型的求解,设计改进遗传算法(IGA)和基于二进制粒子群优化的嵌套算法框架(BPSO嵌套框架),求解固定和多种任务选择策略下的优化调度方案.
3.1. 改进遗传算法(IGA)
遗传算法通过选择、交叉和突变的操作迭代优化求解[16]. 为了求解DAGDTSP模型,采用改进遗传算法(IGA)对AGV执行任务的顺序进行编码,设计种群初始化机制、适应度评价方法和遗传算子. 当达到固定的迭代次数时,IGA算法终止.
染色体编码采用直接表示法,以任务节点序列表示求解DAGDTSP模型所得的固定长度路径,即AGV执行任务的顺序.
在种群初始化的过程中,随机生成一定数量的染色体,即DAGDTSP模型中任务节点的拓扑排序. 染色体即2.2节中有关DAGDTSP模型所定义的可能路径. 可能路径包括有效路径与无效路径. 在适应度的计算中,若染色体为有效路径,则适应度为染色体对应优化调度方案下AGV的行驶总距离;否则,适应度被指定为固定的惩罚值,记为
式中:
利用IGA算法,设计选择、交叉和变异的遗传算子.
1)选择算子. 种群中的染色体为有效路径或无效路径,前者在求解空间内往往占较少数. 为了避免表示有效路径的染色体在进化过程中被大量淘汰,设计保留选择策略如下:选择父代种群中表示有效路径的染色体,对子代种群中的无效路径染色体进行替换.
2)交叉算子. 交叉操作为种群产生新的个体,保证种群的多样性. 记来自
a)随机选择
b)对于
c)在
d)对于
3)变异算子. 变异操作为个体添加新的特征,保证种群变异性. 记来自
a) 在
b) 在
3.2. 基于二进制粒子群优化的嵌套算法框架
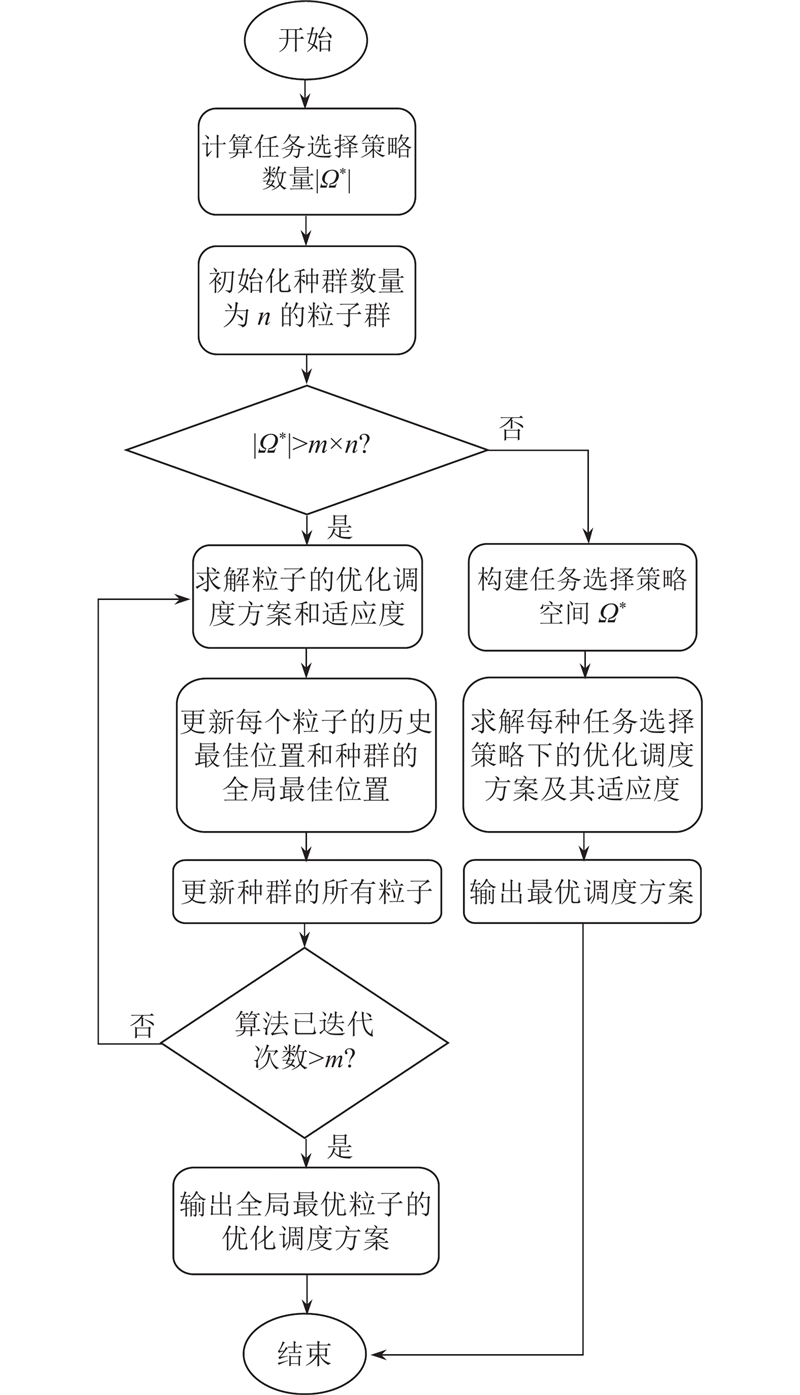
基于二进制粒子群优化的嵌套算法框架(BPSO嵌套框架)动态采取二进制粒子群优化策略(以下称为“BPSO优化策略”)或穷举策略,求解DAGDTSP模型,获取AGV任务调度的优化调度方案. BPSO嵌套框架的程序执行流程如图2所示. 其中,DAGDTSP模型的求解方法被称为内层优化组件(如3.1节的IGA算法). BPSO优化策略基于二进制编码进行粒子表示,设计向量空间生成的粒子群初始化机制、适应度评价方法和粒子更新与矫正机制.
图 2
粒子的速度和位置表示为1个
粒子群的随机初始化. 对于粒子的速度初始化,速度向量的每个维度被随机赋予一个0~1.0的值. 粒子的初始化位置为
基于粒子位置向量与任务选择策略的映射关系,粒子的适应度定义如下. 求解DAGDTSP模型在所映射任务选择策略下的优化调度方案,若求解所得的优化调度方案对应为有效路径,则适应度为AGV在该方案中执行任务所需的行驶总距离;否则,适应度被指定为固定的惩罚值
采用线性惯性权重[3],更新粒子位置为二进制向量[17]. 记BPSO优化策略第
4. 实验验证
通过实验验证利用IGA算法求解DAGDTSP模型的有效性,评价BPSO嵌套框架在不同规模的测试问题中的求解性能,验证BPSO优化策略的有效性. 分析所求优化调度方案对任务变化的适应性,验证DAGDTSP模型的准确性. 实验在11th Gen Intel(R) Core(TM) i7-11800H 2.30 GHz CPU计算机上进行,基于Python求解.
4.1. 调度方案的评估指标和测试问题
为了评价调度方案的优化效果,设计用于表征优化调度方案相比于基准调度方案的运输距离优化效果的指标. 记评估运输距离优化效果的指标为
式中:
通过随机生成出库任务的运输起点和到达时刻,设计4个测试问题,下发出库任务的数量分别为160、120、100和80. 在测试问题中,每隔45 min,每条生产线完成一个联轴器工件的加工,即一个出库任务到达.
4.2. 改进遗传算法(IGA)的性能验证
为了验证改进遗传算法的性能,本节实验(以下称为“实验1”)在测试问题上对比了IGA算法与其他7种算法的运输距离优化效果,设计开展消融实验,以验证IGA算法各遗传算子的有效性. 其中,环境参数设置为:
4.2.1. 改进遗传算法(IGA)性能的对比
为了验证利用IGA算法求解DAGDTSP模型的优越性,设计适用于DAGDTSP模型求解的改进粒子群优化算法(improved particle swarm optimization,IPSO)[3]、改进蚁群算法(improved ant colony optimization,IACO)[3,18]、改进鲸鱼优化算法(improved whale optimization algorithm,IWOA)[19]、改进模拟退火算法(improved simulated annealing,ISA)[20]、改进禁忌搜索算法(improved tabu search,ITS)[21]、贪婪算法和随机算法,开展对比实验. 利用随机算法求解测试问题1、2和3、4,搜索规模分别设置为200 000、100 000.
表 1 基准任务选择策略下IGA与其他7种算法的求解结果
Tab.1
| 测试问题 | 算法 | |||
| 1 | IGA | 1.45 | 797.545 | 0.044 3 |
| IPSO | 1.96 | 803.652 | 0.037 0 | |
| IACO | 4.37 | 800.063 | 0.041 3 | |
| IWOA | 1.48 | 800.685 | 0.040 6 | |
| ISA | 9.84 | 797.545 | 0.044 3 | |
| ITS | 1.87 | 797.545 | 0.044 3 | |
| 贪婪算法 | 0.02 | 803.165 | 0.037 6 | |
| 随机算法 | 14.18 | 799.091 | 0.042 5 | |
| 2 | IGA | 1.13 | 678.832 | 0.061 7 |
| IPSO | 1.36 | 686.860 | 0.050 6 | |
| IACO | 3.27 | 686.742 | 0.050 8 | |
| IWOA | 1.23 | 682.409 | 0.056 7 | |
| ISA | 6.99 | 678.832 | 0.061 7 | |
| ITS | 1.98 | 678.832 | 0.061 7 | |
| 贪婪算法 | 0.02 | 705.199 | 0.025 2 | |
| 随机算法 | 11.26 | 683.029 | 0.055 9 | |
| 3 | IGA | 0.76 | 523.914 | 0.060 5 |
| IPSO | 1.02 | 525.329 | 0.057 9 | |
| IACO | 2.01 | 528.875 | 0.051 6 | |
| IWOA | 0.76 | 523.914 | 0.060 5 | |
| ISA | 4.46 | 523.914 | 0.060 5 | |
| ITS | 1.96 | 523.914 | 0.060 5 | |
| 贪婪算法 | 0.02 | 552.081 | 0.010 0 | |
| 随机算法 | 4.94 | 523.914 | 0.060 5 | |
| 4 | IGA | 0.57 | 422.930 | 0.051 0 |
| IPSO | 0.69 | 422.930 | 0.051 0 | |
| IACO | 1.09 | 423.563 | 0.049 6 | |
| IWOA | 0.62 | 422.930 | 0.051 0 | |
| ISA | 2.91 | 422.930 | 0.051 0 | |
| ITS | 1.73 | 422.930 | 0.051 0 | |
| 贪婪算法 | 0.02 | 429.891 | 0.035 4 | |
| 随机算法 | 3.91 | 422.930 | 0.051 0 |
4.2.2. IGA算法的遗传算子性能验证
记不采用选择、交叉和变异算子的IGA算法分别为“IGA-NS”、“IGA-NC”和“IGA-NM”,在4个测试问题上,运行各算法50次,择优选取基准任务选择策略下的优化调度方案. 实验结果如表2所示,IGA算法的优化效果在测试问题1上优于IGA-NS,表明选择算子有效. 在测试问题1、2、3上优于IGA-NC,表明交叉算子有效. 在测试问题1、2、4上优于IGA-NM,表明变异算子有效. IGA算法的遗传算子有效性在消融实验结果中得到验证.
表 2 IGA及其变体(IGA-NS/NC/NM)的求解结果
Tab.2
| 测试问题 | F | |||
| IGA | IGA-NS | IGA-NC | IGA-NM | |
| 1 | ||||
| 2 | ||||
| 3 | ||||
| 4 | ||||
4.3. BPSO嵌套框架的性能验证
本节实验(以下称为“实验2”)对BPSO嵌套框架的BPSO优化策略和穷举策略的性能进行验证,分析所求解的优化调度方案对任务变化的适应性,环境参数的设置同实验1. 实验1表明,IGA算法针对固定任务选择策略下的优化策略求解更具备有效性. 实验2选择IGA算法为BPSO嵌套框架的内层优化组件,对每个粒子对应的任务选择策略求解10次粒子适应度和优化调度方案,择优选取求解结果. 实验使用多进程技术,并行加速计算各个粒子的适应度和优化调度方案.
4.3.1. 求解策略的性能验证
根据任务选择策略空间规模
表 3 BPSO嵌套框架的求解结果
Tab.3
| 测试问题 | ||||
| 1 | 783.117 | 142.94 | ||
| 2 | 669.466 | 117.76 | ||
| 3 | 720 | 520.812 | 22.77 | |
| 4 | 70 | 422.930 | 1.64 |
为了验证BPSO优化策略及其粒子更新与矫正机制的有效性,设计采用0-1编码方案的二进制遗传算法(binary genetic algorithm,BGA)和二进制鲸鱼优化算法(binary whale optimization algorithm,BWOA)的优化策略. 设计BPSO-II优化策略,将粒子位置更新为连续向量. 如表4所示,在测试问题1、2上运行4种优化策略各6次,对
表 4 4种求解策略的优化效果分析
Tab.4
| 测试问题 | 求解策略 | ||||
| 1 | BPSO | ||||
| BGA | |||||
| BWOA | — | ||||
| BPSO-II | |||||
| 2 | BPSO | ||||
| BGA | |||||
| BWOA | |||||
| BPSO-II |
4.3.2. 优化调度方案的适应性分析
为了分析BPSO嵌套框架求解的优化调度方案对任务变化后的适用性,记
表 5 任务变化后测试问题的优化效果
Tab.5
| 测试 问题 | |||||
| 减产 | 延期 | 重新求解 | 原优化调度方案 | ||
| 1 | 16 | 16 | |||
| 2 | 12 | 12 | |||
| 3 | 10 | 10 | |||
| 4 | 8 | 8 | |||
4.4. DAGDTSP模型准确性的验证
本节实验(以下称为“实验3”)通过设置不同的环境参数
表 6 不同环境参数下的测试问题优化效果
Tab.6
| 测试 问题 | F | |||
| C = 12, R = 3 | C = 12, R = 4 | C = 10, R = 3 | C = 10, R = 4 | |
| 1 | ||||
| 2 | ||||
| 3 | ||||
| 4 | ||||
5. 结 语
本文围绕单载AGV在生产线和仓库之间运输托盘和工件的任务调度问题,以最小化AGV执行任务的行驶总距离为优化目标,建立考虑任务执行顺序约束和任务节点信息随环境变化的DAGDTSP模型,提出固定任务选择策略下求解DAGDTSP模型的改进遗传算法(IGA)、考虑多种任务选择策略下求解优化调度方案的BPSO嵌套框架. 在测试问题上,通过实验验证了IGA算法和BPSO嵌套框架各自在求解速度、优化效果和任务变化适应性等方面的优越性和有效性以及DAGDTSP模型在面对环境变化时的准确性. 本文研究基于AGV作业过程中无电量不足情况的假设,未来工作将在问题建模中考虑AGV的充电问题. 此外,将围绕任务变化涉及被选任务时优化调度方案的适应性问题,开展进一步的研究.
参考文献
自适应樽海鞘群算法求解考虑运输时间的柔性作业车间调度
[J].
Adaptive salp swarm algorithm for solving flexible job shop scheduling problem with transportation time
[J].
A novel joint optimization method of multi-agent task offloading and resource scheduling for mobile inspection service in smart factory
[J].
Energy-efficient path planning for a single-load automated guided vehicle in a manufacturing workshop
[J].DOI:10.1016/j.cie.2021.107397 [本文引用: 5]
Efficient task planning for heterogeneous AGVs in warehouses
[J].DOI:10.1109/TITS.2024.3356514 [本文引用: 1]
Formulating and solving integrated order batching and routing in multi-depot AGV-assisted mixed-shelves warehouses
[J].DOI:10.1016/j.ejor.2022.08.047
改进自适应遗传算法求解“货到人”拣选系统订单分批问题
[J].DOI:10.3901/JME.2023.04.308 [本文引用: 1]
Improved adaptive genetic algorithm for order batching of “part-to-picker” picking system
[J].DOI:10.3901/JME.2023.04.308 [本文引用: 1]
考虑能耗节约的集装箱码头双小车岸桥与AGV联合配置及调度优化
[J].
Joint configuration and scheduling optimization of dual-trolley quay crane and AGV for container terminal with considering energy saving
[J].
基于深度强化学习的自动化码头堆场场桥调度方法
[J].
Yard crane scheduling method based on deep reinforcement learning for the automated container terminal
[J].
Dynamic scheduling and path planning of automated guided vehicles in automatic container terminal
[J].
AGV-based vehicle transportation in automated container terminals: a survey
[J].DOI:10.1109/TITS.2022.3215776 [本文引用: 1]
Study on scheduling and path planning problems of multi-AGVs based on a heuristic algorithm in intelligent manufacturing workshop
[J].
AGV routing and motion planning in a flexible manufacturing system using a fuzzy-based genetic algorithm
[J].
Resource management in decentralized industrial automated guided vehicle systems
[J].DOI:10.1016/j.jmsy.2019.11.003 [本文引用: 1]
考虑任务偏序关系的AGV路径优化
[J].
AGV routing optimization considering task partial order relation
[J].
基于改进近端策略优化算法的AGV路径规划与任务调度
[J].
AGV path planning and task scheduling based on improved proximal policy optimization algorithm
[J].
Evolutionary algorithms and their applications to engineering problems
[J].DOI:10.1007/s00521-020-04832-8 [本文引用: 1]
25 years of particle swarm optimization: flourishing voyage of two decades
[J].
A review on representative swarm intelligence algorithms for solving optimization problems: applications and trends
[J].DOI:10.1109/JAS.2021.1004129 [本文引用: 1]
A systematic review of the whale optimization algorithm: theoretical foundation, improvements, and hybridizations
[J].DOI:10.1007/s11831-023-09928-7 [本文引用: 1]
A simulated annealing algorithm for the capacitated vehicle routing problem with two-dimensional loading constraints
[J].DOI:10.1016/j.ejor.2017.08.035 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}