

手术器械作为微创手术机器人(minimally invasive surgical robot, MISR)的末端执行器,能够替代医生在传统手术中手持器械的所有动作. Minor等[9]设计的名为AMMIS的手术器械,齿轮机构紧凑具有传动稳定、定位精度较高、传输比恒定等优点,很好地解决了手颤抖和运动放大的问题. 这种特殊的机构工作空间较大、刚度较高、承载能力较大且工作时间长,但对连杆轮廓和形状的设计要求比较苛刻. Arata等[10]使用伺服电机和刚性连杆代替钢丝传动设计的手术器械,在避免常见的钢丝松动问题的同时也改善了传动精度,但存在手术器械中刚性连杆体积过大、控制不方便的问题. Guthart等[11]为da Vinci系统研发的EndoWrist是应用广泛的手术器械,它能够模拟人手在横滚、偏航、俯仰和开合4个自由度的灵活运动. EndoWrist采用钢丝传动,使用N+1个电机驱动N个自由度,手术器械的关节由4个线轮钢丝传动机构驱动. EndoWrist的驱动平台与远心机构(remote centre mechanism, RCM)相联结,体积较大且不便于携带. 李建民等[12]为“妙手A”系统设计的手术器械包含3或4个自由度,器械结合从操作手可以实现在工作空间内的全维度主从式跟随运动. 器械外径为8 mm,器械俯仰和偏航范围为±90°,横滚范围为0°~270°. 利用在手末端设计的快换接口,器械完成与从手的安装和拆卸的时间不超过20 s. 马如奇等[13]研发的腹腔MISR手术器械为模块化蛇形设计. 这套器械总共有7个自由度,包括器械轴的横滚、腕部的俯仰和偏航、夹钳的开合等,可以满足多种手术类型的要求;同样该器械设计有快换接口. 不过,器械腕部和末端夹钳的总长为70 mm,与病灶与鞘套插入点间有限的距离相比太长了,这套器械的临床应用也因此受到严重限制. Chen等[14]开发的模块化关节(末端灵活单元)改进了深入喉部手术器械的灵活度. 这套模块化关节包括2套蛇形组件,可以为手术器械提供4个自由度的运动. 虽然器械的灵活度有所改进,但该设计的控制算法比较复杂,须考虑连续体机构运动学和驱动链中的柔性和间隙问题.
针对现有的四自由度微创手术器械在传动系统的柔顺性、驱动平台的紧凑性、控制算法的简约化和临床应用的实用性等方面存在的诸多不足,本研究将介绍四自由度微创手术器械的机械结构并对其进行运动学分析. 内容包括手术器械的构型综合,详细尺度设计及驱动系统设计;运动学正解,工作空间分析及灵活度分析;展示手术器械的原理样机.
1. 手术器械机构综合
MIS的基本技术操作包括夹持、剪切、分离、缝合及打结等,其中缝合及打结是重要且复杂的技术操作. 作为有效的术中止血方式,夹持器是术中被执行频率较高的器械类型. 本研究以夹持器为例设计微创手术器械.
在实际的MIS操作过程中,手术器械都要穿过放置在患者腹壁创口处的鞘套,鞘套内径一般为10 mm. 手术器械以创口作为支点,只能实现以创口为支点的3个转动及沿器械轴线的直线运动. 其工作空间是以创口为顶点的倒圆锥,器械的摆动角度和直线位移直接决定器械在腹腔内的手术操作空间. 微创手术器械的操作方式如图1所示. 可以看出,手术器械在创口处被限制的2个移动自由度影响了器械操作的灵活性,与MIS要求的——器械能够在受限的腹腔封闭空间中实现灵活技术操作相矛盾. 为了顺利完成术中各种技术操作,在手术器械设计时必须考虑合适的腔内自由度,以弥补创口约束对器械自由度造成的损失.
图 1
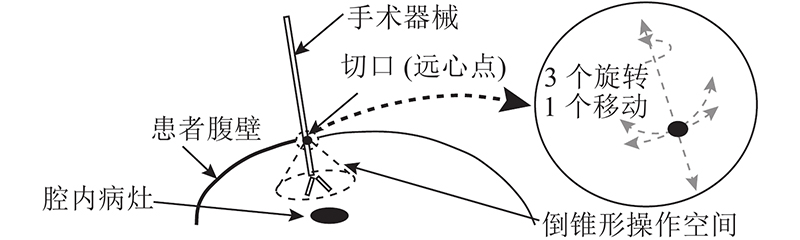
图 1 微创手术器械的操作方式
Fig.1 Operation mode of minimally invasive surgical instrument
MISR远心机构[15]能够为手术器械提供绕腹壁创口的2个转动自由度及沿器械轴的1个移动自由度,且这3个自由度可以实现手术器械末端在手术空间内的位置调整. 因此在手术器械机构设计时,须配置3个姿态自由度及1个夹持自由度,以保证手术器械能够在手术空间内以任意位置和姿态进行技术操作. 针对姿态自由度的需求,有效的方法是为传统微创手术器械添加腕部机构,增加俯仰、偏航这2个自由度.
为了适应远距离传动,并考虑到手术器械末端须为较小的惯量以增强其运动灵活性,驱动端采用旋转电机及钢丝绳驱动. 由于直线运动关节的直线运动量与驱动端的旋转角度换算关系不如转动关节的简单、精准,为了尺寸缩减、控制简单以及各关节精准控制,手术器械末端机构采用转动关节.
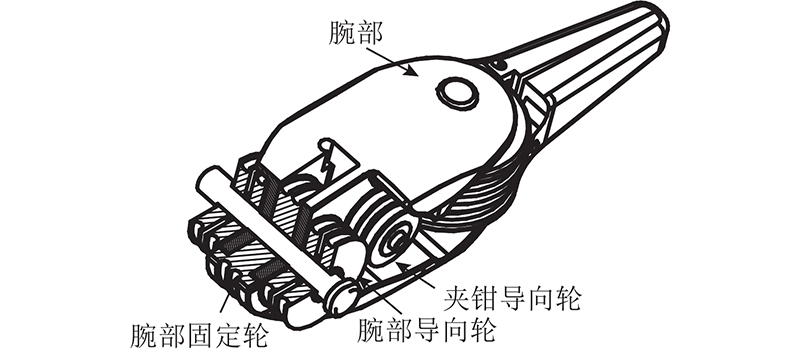
手术器械末端由器械轴、连接件、腕部和夹钳组成,腕部在手术器械末端机构中处于中间位置,腕部机构示意图如图2所示. 在腕部设计上,腕部本体作为手术器械末端各机构的传动线轮搭载平台,将腕部固定轮、腕部导向轮和夹钳导向轮通过销轴设置在相应的空间位置,腕部传动结构示意图如图3所示. 为了适应MIS作业要求,器械末端尺寸较小,径向最大尺寸为10 mm,轴向长度为30 mm. 为了保证连接可靠且不影响传动精度,在腕部本体的狭小空间中各导向轮与销轴采用较大的过渡配合,销轴与腕部本体采用过盈配合. 腕部导向轮和夹钳导向轮均用于引导手术器械末端控制夹钳运动的钢丝绳走向,将其设置在合适的空间位置可以保证夹钳的运动可靠性和灵活性.
图 2
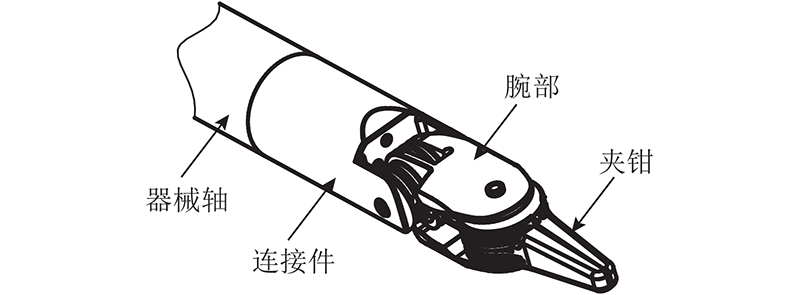
图 3
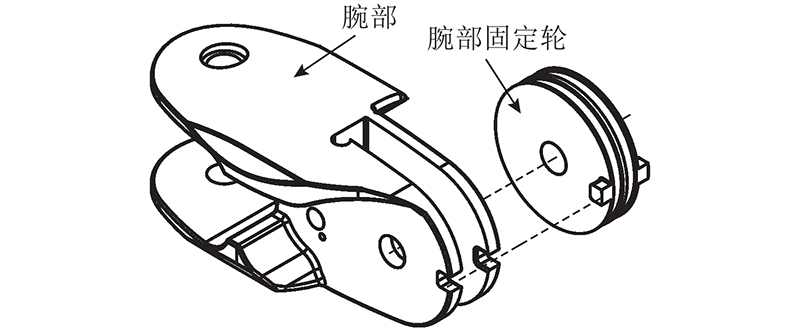
腕部固定轮的设计是为了保证传动钢丝绳在腕部本体处绕腕部本体轴线运动时保持半径不变,以提高运动准确度. 为了适应现有加工条件,克服伸入零件内部的圆弧特征难以加工的问题,将腕部固定轮与腕部本体分开设计. 这样既减小了腕部的加工难度,又能够保证腕部固定轮槽具有较高的制造精度. 腕部固定轮与腕部本体的装配关系如图4所示.
图 4
在夹钳设计上,考虑到夹钳在实际工作中常处于夹紧状态,须使夹钳可以张开的最大角度适应多数病灶组织的夹持尺寸要求,使夹持力达到2 N(MIS常规技术操作的夹持力达到2 N才能保证夹持可靠). 本研究设计的夹钳由2片钳叶组成,通过限位块及其运动槽限制开合角度范围,该夹钳最大展开角度为90°,适应大多数夹持尺寸的要求. 钢丝线槽用于传导钢丝绳走向,将钢丝绳末端固定在钢丝绳固定口,可以实现通过钢丝绳对夹钳的运动控制. 为了保证夹持可靠,防止制造误差引起钳叶无法闭合,钳叶的夹持面设计有向夹钳本体内部倾斜的小角度. 钳叶闭合后仅有2个钳叶末端接触,这使钳叶产生了微小弹性形变. 因此,也可以运用这个特点来增强夹持力以保证可靠夹持.
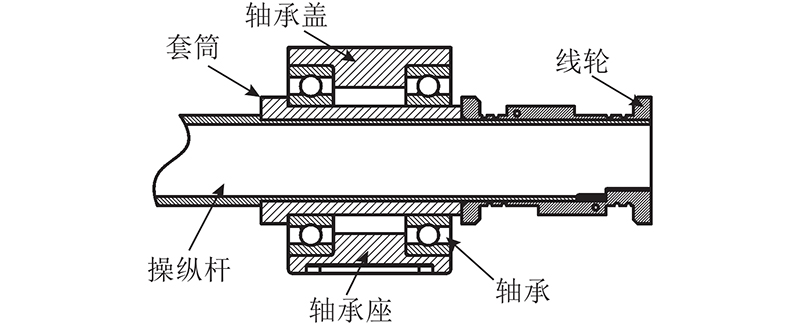
器械轴横滚机构用于实现手术器械沿腹部创口轴线的旋转自由度,其末端与腕部机构的连接件连接,实现手术器械末端在腹腔内的整体旋转. 本研究设计的操纵杆横滚机构由线轮、轴承、套筒、操纵杆、上盖和底座组成. 线轮用于缠绕传动钢丝绳,2根反方向缠绕的钢丝绳在同个驱动电机带动下分别实现不同方向的转动. 设计操纵杆的外径为10 mm(可以有效减小创面),长度为424 mm(可以伸入腹腔内部并具有较大的行程调整空间). 操纵杆横滚机构如图5所示.
图 5
2. 手术器械传动系统
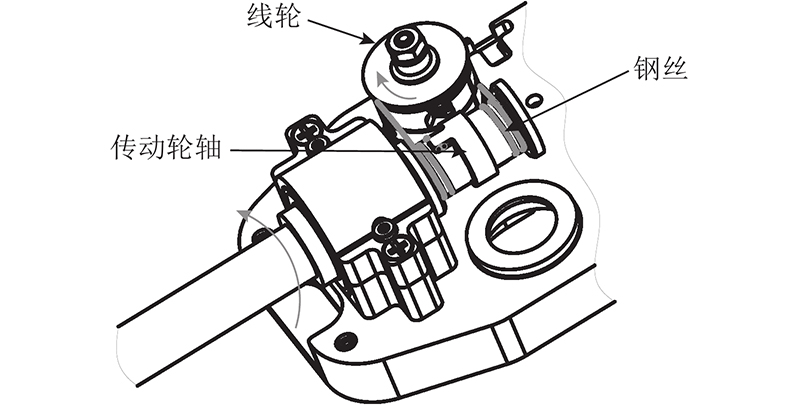
手术器械的工作环境要求手术器械末端尺寸较小,利用钢丝绳传动适宜于远距离传动的优点,将手术器械末端的驱动源置于远离手术器械末端的传动盒内,驱动手术器械末端运动的全部钢丝绳经过细长器械轴的管道引到末端. 如图6所示,器械轴传动系统由线轮、传动轮轴和钢丝绳组成. 从传动轮轴上反向缠绕引出的2根钢丝绳,分别进入线轮轴向两侧的线槽内,使2根钢丝绳在线轴上呈反向缠绕状态. 当驱动电机驱动传动轮轴转动时,在钢丝绳的力和运动传递作用下,一根钢丝绳向传动轮轴上收线,另一根钢丝绳因反向运动实现从传动轮轴上向外放线,从而保证钢丝绳传递不同方向运动的连续性. 线轮安装在操纵杆横滚机构中,将旋转运动传递给手术器械.
图 6
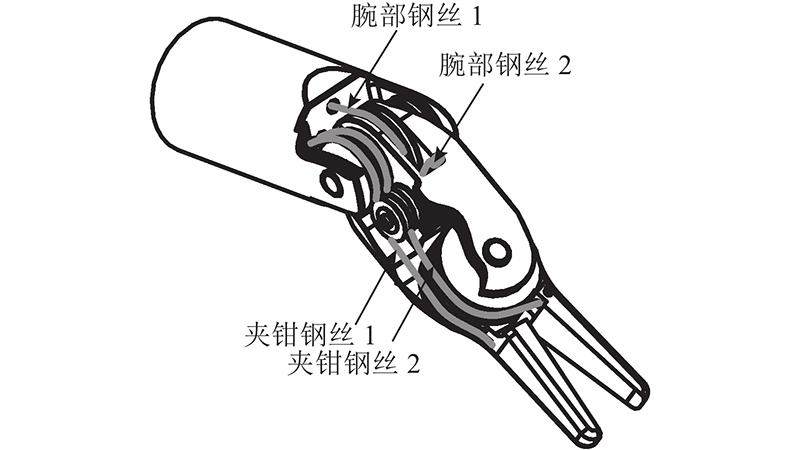
腕部传动系统同样由传动轮轴、导向轮和钢丝绳组成. 如图7所示为手术器械末端绕线方式. 钢丝绳1、2反向缠绕在传动轮轴上,在连接件中引出并传递到腕部机构. 夹钳传动系统由控制2个夹钳钳叶的传动系统组成,每个传动系统组成及运行方式与腕部传动系统相同,通过控制2个传动轮轴的不同转向进行运动组合,实现夹钳的多种运动形式. 本研究采取重量较轻、适宜远距离传动的钢丝绳传动方案,且在腕部形成串联转动关节式机构. 驱动夹钳的钢丝绳在传动系统中引出,经过轴向尺寸较大的操纵杆管道和连接件后,钢丝绳必须经过腕部本体的转动关节,再通过夹钳导向轮的引导,进入相应的夹钳钢丝线槽并在钢丝固定口将钢丝端部固定.
图 7
设腕部导向轮半径为R1,夹钳线槽处旋转半径为R2,当手术器械末端与手术器械轴线重合时,驱动夹钳的钢丝绳在腕部导向轮上的包角为α,假设此时夹钳处于刚好闭合的状态. 腕部本体运动角度为θ,运动后的效果简图如图8所示,此时驱动夹钳的钢丝绳在腕部导向轮上的包角为α′,则有
图 8
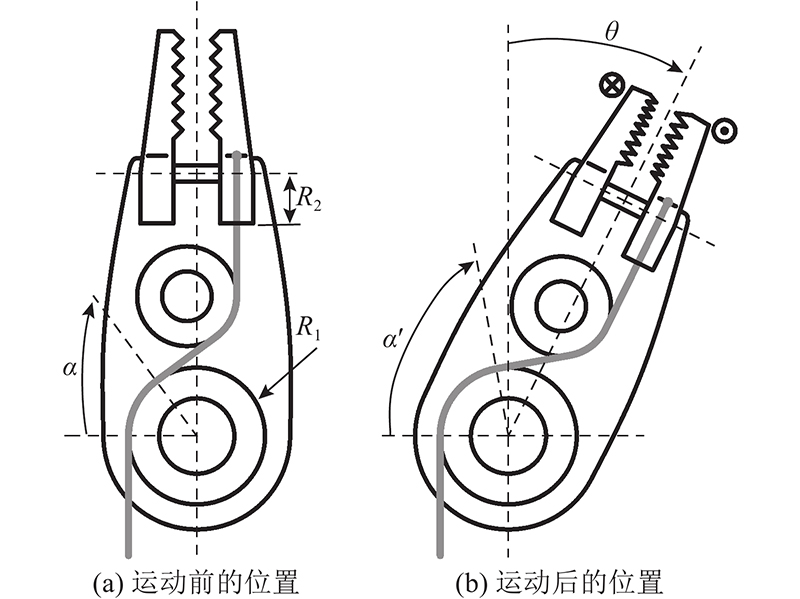
腕部导向轮上与之接触的钢丝绳长度变化为
因为此时夹钳驱动系统没有产生运动,夹钳传动系统中的钢丝绳没有传动作用,所以腕部导向轮上与之接触的夹钳传动钢丝绳长度减小,导致相应的夹钳产生附加运动即运动耦合,夹钳附加运动的角度为
3. 手术器械运动学分析
本研究设计的手术器械是四自由度串联型操作机,手术器械的运动学分析包括正运动学、工作空间、速度雅可比变换以及奇异性分析.
手术器械的机构原理图和关节坐标系如图9所示. 根据微创手术器械的机构设计及特点,建立手术器械末端简化运动学模型,共有4个关节. 其中第1、2关节的轴线(轴线1、2)垂直相交,第2、3关节的轴线(轴线2、3)呈空间正交关系,且2根轴线相距为11.5 mm. 第3、4关节的轴线(轴线3、4)为2片夹钳钳叶的旋转运动轴线. 由于轴线3、4重合且分别由1个伺服电机驱动,2个关节的运动学特性与之完全相同,因此简化为对1个关节的研究. 按照机器人学中的改进D-H参数法写出其改进D-H参数如表1所示. 表中,i为坐标系,其中0代表基坐标系,1、2、3分别代表相应编号连杆的坐标系,tool代表工具坐标系;
图 9
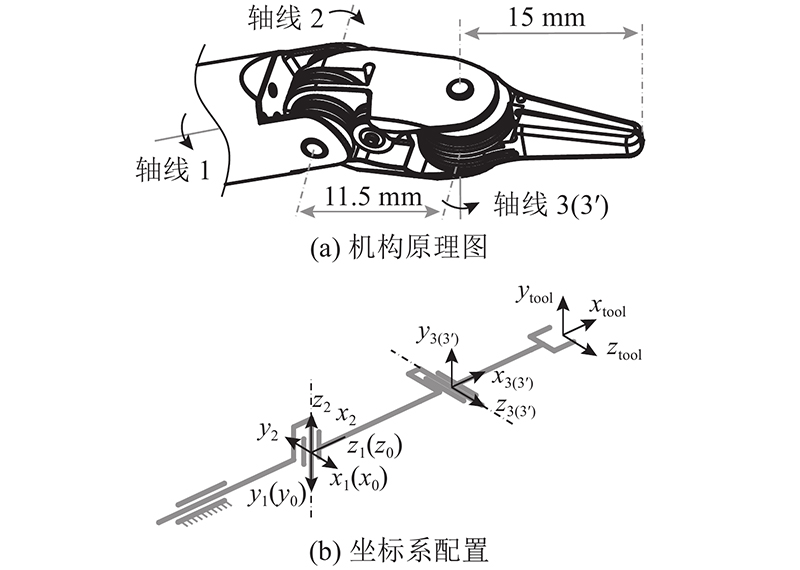
图 9 手术器械机构原理图和关节坐标系
Fig.9 Mechanism diagram and joint coordinates of surgical instrument
表 1 手术器械的改进D-H参数
Tab.1
| i | ai-1 /(º) | ai-1 /mm | di /mm | θi /(º) |
| 1 | 0 | 0 | 0 | θ1 |
| 2 | 90 | 0 | 0 | θ2 |
| 3(3’) | 90 | a3 | 0 | θ3 (θ3’) |
| tool | 0 | at | 0 | 0 |
式中:
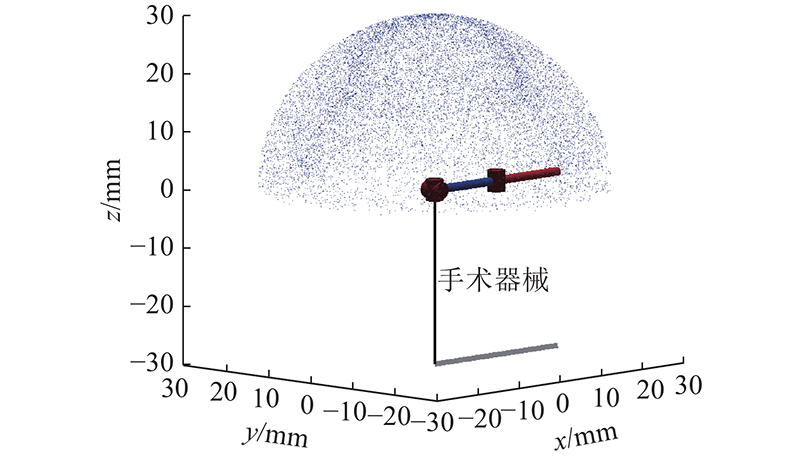
采用Matlab中的Robotics Toolbox工具箱绘制手术器械的机构简图,通过建立关节随机概率模型和循环正运动学计算,得到手术器械末端点的集合即手术器械工作空间,如图10所示. 可以看到,由于手术器械末端各关节运动范围的限制,手术器械的运动空间是半球壳体.
图 10
速度可以看作是单位采样时间内的微分运动,推导该手术器械的速度雅可比变换矩阵,就可以建立手术器械末端速度与各关节速度之间的映射关系. 由于微分运动具有矢量性,此处采用微分变换法,微分移动矢量和微分转动矢量共同组成微分算子. 根据改进D-H参数法,推导关节i转动引起的末端微分运动矢量以及相对应的速度雅克比矩阵Ji,得到手术器械相对于工具坐标系的速度雅克比矩阵为
将其转化为相对于基坐标系下的速度雅克比,以得到机器人末端在空间中的绝对速度
手术器械工作空间关于y轴对称,因此可以在xz平面上讨论手术器械的可操作性,即手术器械在其工作空间内沿所有方向自由运动的能力. 为了研究局部操作能力,可以分析手术器械的雅克比矩阵. 末端执行器的物体速度与基础坐标系的选择无关,因此用工具坐标的雅克比矩阵定义可操作性指标为
即工具雅克比矩阵最小奇异值和最大奇异值的比值. 手术器械工作空间在xz平面上的截图和可操作性分布如图11所示. 图中标记数据均为µ 的数值. 可以看出,在工作空间内部,手术器械的可操作性较高且分布均匀,并呈现由内而外逐渐降低的趋势,到工作空间的顶点处降为最低,即在顶点处出现奇异位形.
图 11
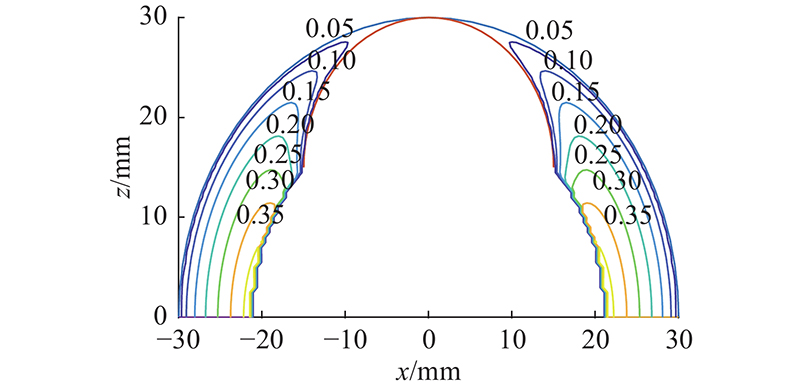
图 11 手术器械可操作性在工作空间中的分布
Fig.11 Manipulability in workspace of surgical instrument
4. 手术器械原理样机
试制手术器械及其驱动平台原理样机如图12所示. 手术器械全长为512 mm,器械轴外径为10 mm. 与人体组织接触的手术器械末端采用医用不锈钢材料,同时利用柔性钢丝绳提升手术器械的生物兼容性,减小对人体组织的潜在伤害. 驱动平台作为该手术器械的动力来源,由底座、驱动轮系模块、手术器械接口组成. 考虑到后期手术器械及其驱动平台搭载,以及机械臂末端实现多自由度的手术动作要求,在设计驱动平台时,选择质量较轻、适宜远距离传动的钢丝绳传动方案,并水平放置驱动电机.
图 12

如图13所示为微创手术器械的驱动平台传动系统图. 该系统底座包含4个支撑板,每个支撑板固定1个驱动电机. 在传动轮系模块中,有4组传动关系相同的传动轮组,分别对应4个自由度. 在手术器械接口处,有4个离合盘分别与其下方的输出轮通过键连接共同旋转,接入手术器械后,4个下离合盘将与手术器械的传动轮轴一一配合,通过驱动杆下弹簧的作用使驱动平台与手术器械牢牢配合,实现可靠地驱动手术器械末端4个自由度的目的.以1个传动轮组为例,表示具体的传动过程,其他的3个传动系统原理与之相同. 钢丝绳A1的一端固定在驱动轮上,另一端依次绕过导向轮1、2,固定缠绕在输出轮上. 钢丝绳A2一端反方向固定缠绕在输出轮上,另一端依次绕过导向轮2、1,固定在驱动轮上. 驱动电机带动驱动轮,同时引起A1、A2的运动,绕过导向轮1、2改变钢丝绳传动方向,带动输出轮,输出轮将运动传递到下离合盘使运动输出.
图 13
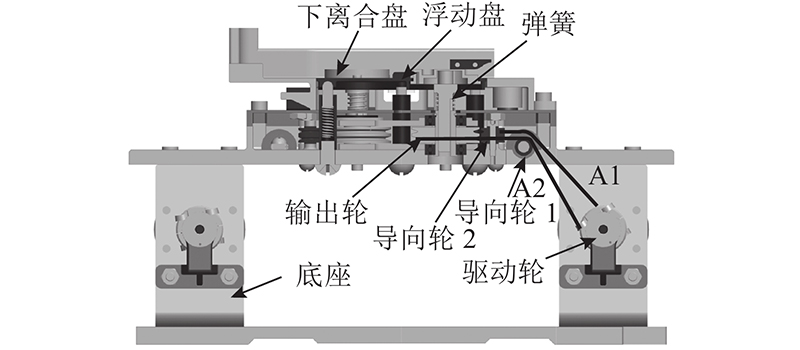
图 14
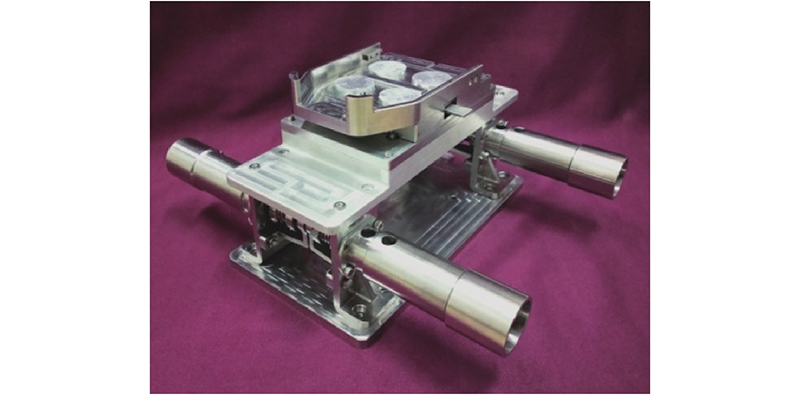
图 15
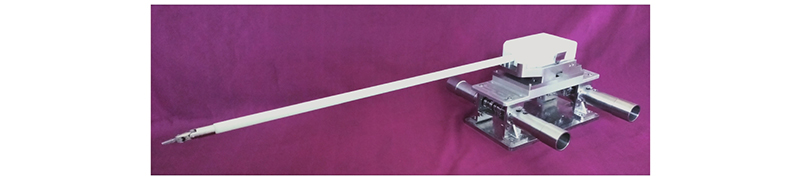
图 15 手术器械及驱动平台的整体装配
Fig.15 Assembly of surgical instrument and driving platform
5. 结 论
(1)本研究设计了具备器械轴横滚、腕部俯仰、偏航与夹钳开合,共4个自由度的微创手术器械. 弥补了传统手持式微创手术器械深入鞘套时,由于创口约束对器械2各移动自由度造成的损失.
(2)分析手术器械传统系统中腕部与夹钳的运动耦合情况,研究包括运动学正解. 工作空间及灵活度在内的手术器械运动学特性. 手术器械的机构设计具有工作空间充分且灵活度高的特点.
(3)为手术器械研制钢丝绳传动方式的驱动平台,将驱动电机水平安装以降低重心. 该驱动平台设计紧凑并将驱动模块从机械臂中分离出来,在测试手术器械整体性能时,达到与带有机械臂相同的效果,降低了研发成本.
(4)本研究设计的手术器械传动系统柔顺性好,驱动平台设计紧凑,具有成本低、腕部运动解耦方法简易和临床应用实用性强等特点.
(5)下一步计划开展的研究工作如下. 手术器械的控制系统搭建和主从遥操作控制算法设计; 解除腕部与夹钳的运动耦合,将主操作控制器的位置指令精确地映射到手术器械末端.
参考文献
The role of technology in minimally invasive surgery: state of the art, recent developments and future directions
[J].DOI:10.1136/postgradmedj-2016-134311 [本文引用: 1]
Conventional versus minimally invasive hartmann takedown: a meta-analysis of the literature
[J].DOI:10.1007/s00268-019-04962-8 [本文引用: 1]
Toward teaching by demonstration for robot-assisted minimally invasive surgery
[J].DOI:10.1109/TASE.2020.3045655 [本文引用: 1]
An evaluation of inanimate and virtual reality training for psychomotor skill development in robot-assisted minimally invasive surgery
[J].
Supervised scene illumination control in stereo arthroscopes for robot assisted minimally invasive surgery
[J].
Development of visible manipulator with multi-gear array mechanism for laparoscopic surgery
[J].
Lightweight deep neural network for real-time instrument semantic segmentation in robot assisted minimally invasive surgery
[J].DOI:10.1109/LRA.2021.3066956 [本文引用: 1]
微创手术机器人控制策略
[J].
Control strategies of minimally invasive surgical robot
[J].
一种新型机器人微创手术微器械的机构设计及运动学分析
[J].DOI:10.3724/SP.J.1218.2013.00402 [本文引用: 1]
Mechanism design and kinematics analysis of a micro instrument for robotic minimally invasive surgery
[J].DOI:10.3724/SP.J.1218.2013.00402 [本文引用: 1]
A variable curvature model for multi-backbone continuum robots to account for inter-segment coupling and external disturbance
[J].DOI:10.1109/LRA.2021.3058925 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}