| 智能机器人 |
|

|
|
|
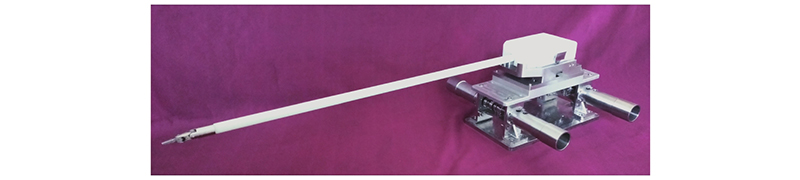
| 四自由度微创手术器械的机构综合及运动学分析 |
李坤1( ),李继华1,李磊1,卓越1,潘博2,付宜利2 ),李继华1,李磊1,卓越1,潘博2,付宜利2 |
1. 山东建筑大学 机电工程学院,山东 济南 250101
2. 哈尔滨工业大学 机器人技术与系统国家重点实验室,黑龙江 哈尔滨 150080 |
|
| Mechanism synthesis and kinematic analysis of 4-DOF minimally invasive surgical instrument |
| Kun LI1(),Ji-hua LI1,Lei LI1,Yue ZHUO1,Bo PAN2,Yi-li FU2 |
1. School of Mechanical and Electronic Engineering, Shandong Jianzhu University, Jinan 250101, China
2. State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150080, China |
引用本文:
李坤,李继华,李磊,卓越,潘博,付宜利. 四自由度微创手术器械的机构综合及运动学分析[J]. 浙江大学学报(工学版), 2022, 56(6): 1119-1126.
Kun LI,Ji-hua LI,Lei LI,Yue ZHUO,Bo PAN,Yi-li FU. Mechanism synthesis and kinematic analysis of 4-DOF minimally invasive surgical instrument. Journal of ZheJiang University (Engineering Science), 2022, 56(6): 1119-1126.
链接本文:
https://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2022.06.008
或
https://www.zjujournals.com/eng/CN/Y2022/V56/I6/1119
|
| 1 |
TONUTTI M, ELSON D S, YANG G Z, et al The role of technology in minimally invasive surgery: state of the art, recent developments and future directions[J]. Postgraduate Medical Journal, 2017, 93: 159- 167
doi: 10.1136/postgradmedj-2016-134311
|
| 2 |
GUERRA F, COLETTA D, BASSO C D, et al Conventional versus minimally invasive hartmann takedown: a meta-analysis of the literature[J]. World Journal of Surgery, 2019, 43: 1820- 1828
doi: 10.1007/s00268-019-04962-8
|
| 3 |
SU H, MARIANI A, OVUR S E, et al Toward teaching by demonstration for robot-assisted minimally invasive surgery[J]. IEEE Transactions on Automation Science and Engineering, 2021, 18 (2): 484- 494
doi: 10.1109/TASE.2020.3045655
|
| 4 |
CACCIANIGA G, MARIANI A, MOMI E D, et al An evaluation of inanimate and virtual reality training for psychomotor skill development in robot-assisted minimally invasive surgery[J]. IEEE Transactions on Medical Robotics and Bionics, 2020, 2 (2): 118- 129
doi: 10.1109/TMRB.2020.2990692
|
| 5 |
ALI S, JONMOHAMADI Y, TAKEDA Y, et al Supervised scene illumination control in stereo arthroscopes for robot assisted minimally invasive surgery[J]. IEEE Sensors Journal, 2021, 21 (10): 11577- 11587
doi: 10.1109/JSEN.2020.3037301
|
| 6 |
WANG H B, WANG S X, ZUO S Y Development of visible manipulator with multi-gear array mechanism for laparoscopic surgery[J]. IEEE Robotics and Automation Letters, 2020, 5 (2): 3090- 3097
doi: 10.1109/LRA.2020.2975722
|
| 7 |
SUN Y W, PAN B, FU Y L Lightweight deep neural network for real-time instrument semantic segmentation in robot assisted minimally invasive surgery[J]. IEEE Robotics and Automation Letters, 2021, 6 (2): 3870- 3877
doi: 10.1109/LRA.2021.3066956
|
| 8 |
GUTHART G S. About intuitive: helping people get back to what matters most [EB/OL]. (2021-12-31)[2022-04-23]. https://www.intuitive.com/en-us/about-us/company.
|
| 9 |
MINOR M, MUKHERJEE R. A dexterous manipulator for minimally invasive surgery [C]// Proceedings of the IEEE International Conference on Robotics and Automation. Detroit: IEEE, 1999: 2057-2064.
|
| 10 |
ARATA J, MITSUISHI M, WARISAWA S, et al. Development of a dexterous minimally invasive surgical system with augumented force feedback capability [C]// Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Edmonton: IEEE, 2005: 3207-3212.
|
| 11 |
GUTHART G S, SALISBURY J K. The intuitiveTM telesurgery system: overview and application [C]// Proceedings of IEEE International Conference on Robotics and Automation. San Francisco: IEEE, 2000: 618-621.
|
| 12 |
李建民, 王树新, 张建勋, 等 微创手术机器人控制策略[J]. 天津大学学报, 2011, 44 (10): 884- 889
LI Jian-min, WANG Shu-xin, ZHANG Jian-xun, et al Control strategies of minimally invasive surgical robot[J]. Journal of Tianjin University, 2011, 44 (10): 884- 889
|
| 13 |
马如奇, 王志东, 董为, 等 一种新型机器人微创手术微器械的机构设计及运动学分析[J]. 机器人, 2013, 35 (4): 402- 409
MA Ru-qi, WANG Wei-dong, DONG Wei, et al Mechanism design and kinematics analysis of a micro instrument for robotic minimally invasive surgery[J]. Robot, 2013, 35 (4): 402- 409
doi: 10.3724/SP.J.1218.2013.00402
|
| 14 |
CHEN Y Y, WU B B, JIN J B, et al A variable curvature model for multi-backbone continuum robots to account for inter-segment coupling and external disturbance[J]. IEEE Robotics and Automation Letters, 2021, 6 (2): 1590- 1597
doi: 10.1109/LRA.2021.3058925
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|