四自由度微创手术器械的机构综合及运动学分析
Mechanism synthesis and kinematic analysis of 4-DOF minimally invasive surgical instrument
四自由度微创手术器械的机构综合及运动学分析 |
| 李坤,李继华,李磊,卓越,潘博,付宜利 |
|
Mechanism synthesis and kinematic analysis of 4-DOF minimally invasive surgical instrument |
| Kun LI,Ji-hua LI,Lei LI,Yue ZHUO,Bo PAN,Yi-li FU |
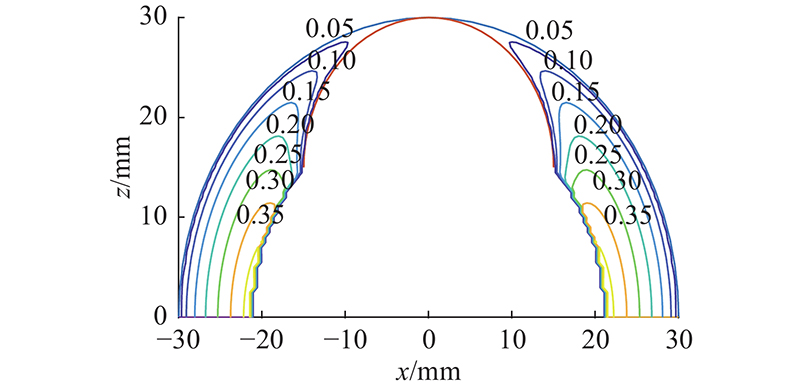
| 图 11 手术器械可操作性在工作空间中的分布 |
| Fig.11 Manipulability in workspace of surgical instrument |
|
|