

无人机(unmanned aerial vehicle, UAV)的控制方法种类繁多,主要包括PID( proportional integral derivative)控制、LQR(linear quadratic regulator)控制、反步控制、滑模控制、鲁棒控制等[1-5]. 国内外对无人机的研究工作多针对固定翼或多旋翼,对共轴反桨无人机的研究起步较晚,取得的研究成果包括:Teh等[6]基于卡尔曼滤波器和降阶的Luenberger观测器,设计研发小型共轴双旋翼无人机的控制系统;Husnic[7]提出基于新的有限时间收敛扰动观测器的分层控制器,以解决小型共轴旋翼式无人机在未知气动力作用下的路径跟踪问题;陈保国等[8]提出基于模糊控制的共轴飞行器姿态自稳算法;王长龙等[9]基于反步法设计鲁棒跟踪控制器,实现共轴旋翼无人机的姿态控制;陈汉等[10]针对共轴双旋翼飞行器的悬停控制提出滑模PID控制算法;Xu等[11]针对具有2个可倾转同轴转子的无人机机器人推导计算力矩控制器,实现双自由度倾转机构的多功能运动模式.
1. 无人机整体设计
1.1. 设计指标
如表1所示,在对共轴反桨无人机的设计中,无人机飞行质量、总体布局及姿态控制有明确的设计指标. 表中,mmax为最大飞行质量,meff为有效任务荷载,L为整机长度,R为无人机外径,Hmax为最大飞行高度,vmax为最大飞行速度,θmax为机头最大偏转角, θerr机头偏转时可允许最大角度抖动量.
表 1 共轴反桨无人机设计指标
Tab.1
| 指标 | 指标值 | 指标 | 指标值 | |
| mmax/kg | ≤15 | Hmax/m | 10 | |
| meff/kg | 2 | vmax/(m·s−1) | 20 | |
| L/mm | ≤1 200 | θmax/(°) | 俯仰/横滚:−15~15 偏航:−90~90 | |
| R/mm | ≤160 | θerr/(°) | ±1 |
1.2. 飞行系统设计
共轴反桨无人机为竖直对称式结构,姿态控制结构分为共轴电机和舵机平台共2个部分,舵机平台采用两轴云台结构设计方案,共轴电机安装于舵机平台上,使用桨夹结构固定无人机旋翼. 共轴反桨无人机飞行结构如图1所示.
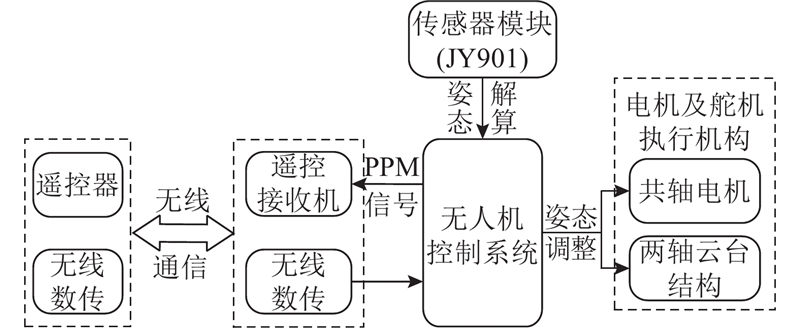
共轴反桨无人机系统采用模块化设计方案,包括主控制器模块、传感器模块、远程遥控模块、电机及舵机执行机构以及无线数据收发模块6部分. 无人机以微处理器STM32F407VGT6作为主控芯片,通过遥控设备及无线通信设备完成无人机的远程通信,实现人机交互,并通过传感器在动态环境下实时测算机体的运动姿态,由主控制器对电机及舵机执行机构进行实时控制,实现无人机的稳定飞行. 无人机系统控制框图如图2所示,图中,JY901为所选用传感器模块型号,PPM为脉位调制信号.
图 1
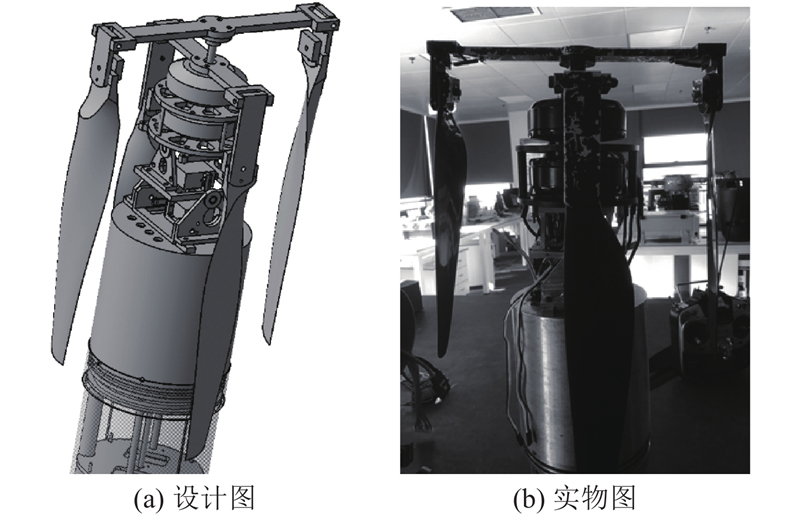
图 2
2. 串级TD-PID控制器设计
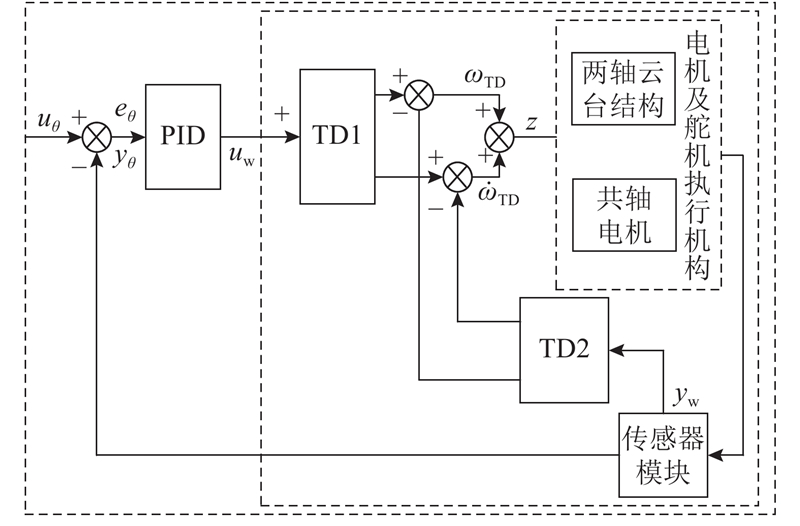
串级TD-PID控制算法是内外嵌套的双环结构,其中外环选用传统PID控制器实现对角度环的控制,内环选用微分跟踪器实现对角速度环的控制. 微分跟踪器视为具有滤波作用的PD控制器,既能对输入信号进行滤波,又能给出该信号的微分信号,有效抑制高频噪声,避免将其带入系统[16]. 这种控制器不仅通过串级控制克服进入副回路的二次扰动,提高系统控制质量,也可以发挥微分跟踪器的优势,抑制响应时的超调现象,改善系统的动态特性.
控制器的角度环以传统PID控制器实现,以遥控信号为期望值
控制律为
控制器的角速度环使用2个微分跟踪器实现对角速度的控制,微分跟踪器TD1的输入为角度环控制器的输出
式中:
微分跟踪器使用离散系统快速最优控制综合函数
式中:
则
式中:
共轴反桨无人机对于控制器的响应时间有较高要求,对微分跟踪器安排过渡过程会导致控制器的控制延时加大,因此在实际设计中放弃对微分跟踪器安排过渡过程,以微分跟踪器实现角速度环的非线性PD控制. 串级TD-PID控制器原理框图如图3所示.
图 3
3. 控制系统仿真
共轴反桨无人机有较复杂的机械传动结构和非线性、强耦合的动力学特性,很难建立精确的数学模型,因此本研究使用Matlab中的系统辨识工具箱辨识无人机的传递函数.
采集共轴反桨无人机飞行时各通道输入输出数据,将姿态调节中获取的角度数据导入Matlab中的系统辨识工具箱,得到无人机俯仰、滚转及偏航3个通道角度环的传递函数. 对于该共轴反桨无人机而言,舵机控制平台是由平行平面构成的两轴云台对称结构,在实现对无人机的俯仰通道及滚转通道的控制时,其传递函数一致. 所得角度环传递函数为
为了验证所提出的TD-PID算法的可行性,在Matlab/Simulink中以阶跃信号为输入信号,并将辨识所得到的传递函数导入已经搭建好的控制模型中,实现对共轴反桨无人机控制算法的建模仿真. 在Matlab/Simulink环境下2种控制算法的仿真模型如图4所示. 图中,u为微分跟踪器的目标值,v1和v2均为微分跟踪器的输出信号,其中v1是对u的跟踪信号,v2是对u的微分信号.
图 4
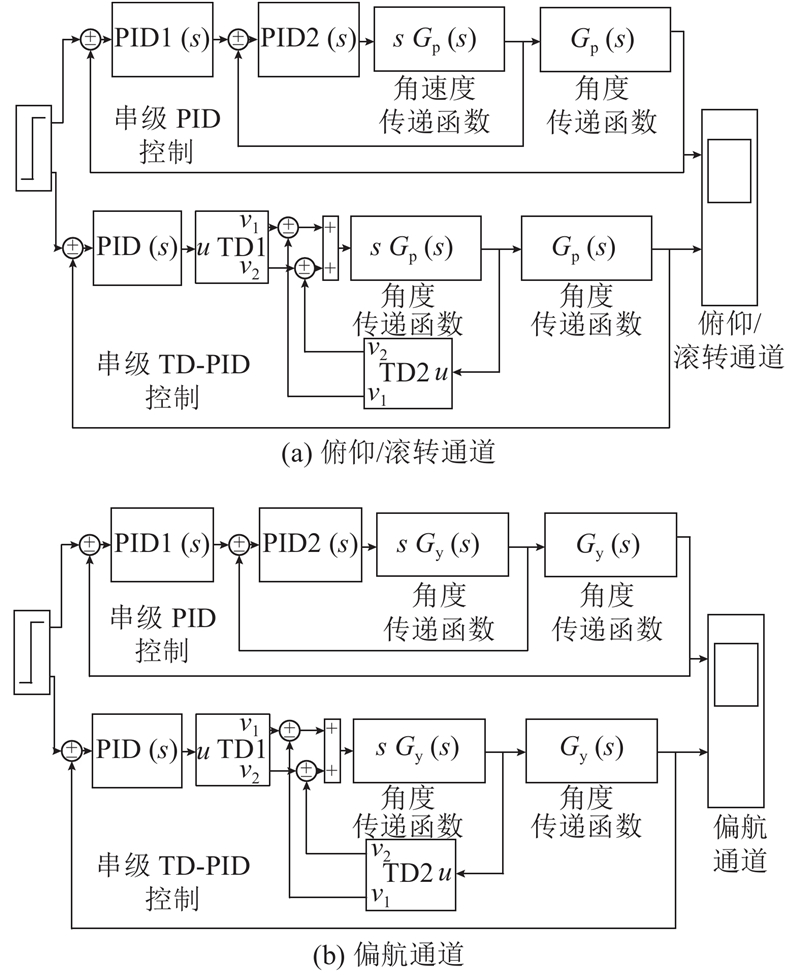
图 4 Matlab/Simulink环境下2种控制算法的仿真模型
Fig.4 Simulation model of two control algorithms in Matlab/Simulink environment
将串级TD-PID控制算法与传统串级PID控制算法的响应曲线进行对比,2种控制法的姿态跟踪仿真结果如图5所示. 图中,Step为0 s时阶跃值为1°的阶跃信号,t为仿真时间,
图 5
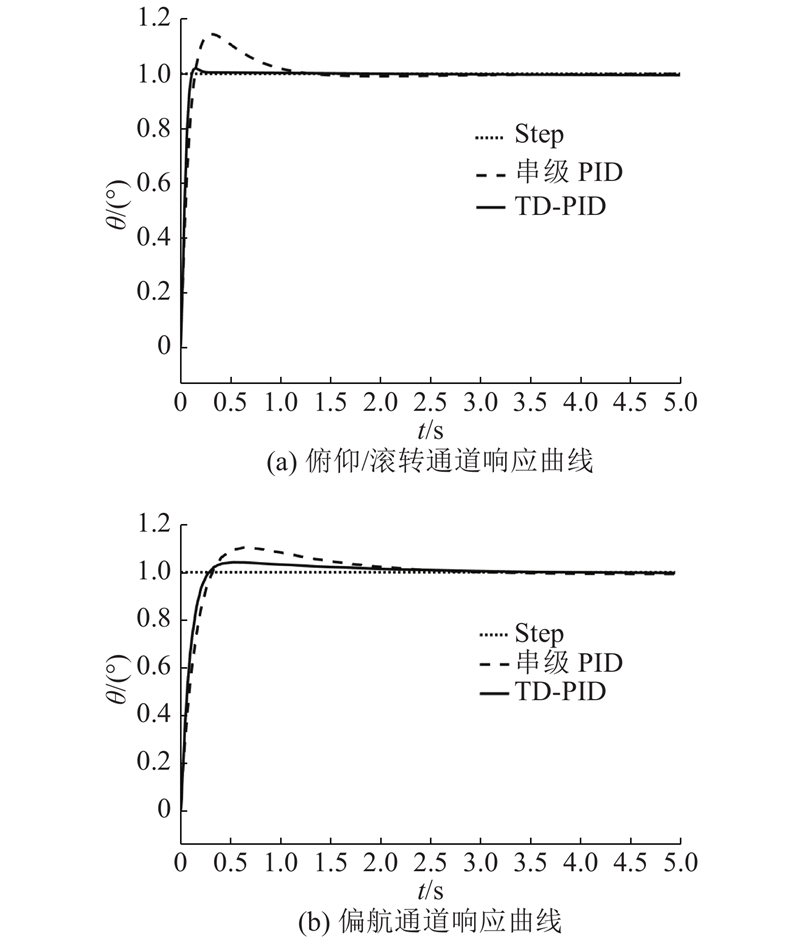
图 5 Matlab/Simulink环境下2种控制算法的仿真结果对比
Fig.5 Comparison of simulation results of two control algorithms in Matlab/Simulink environment
表 2 阶跃响应仿真结果对比
Tab.2
| 通道 | 控制算法 | Tr | QO/% |
| 俯仰/滚转通道 | 串级PID | 0.248 | 16.20 |
| TD-PID | 0.218 | 2.30 | |
| 偏航通道 | 串级PID | 0.321 | 10.20 |
| TD-PID | 0.265 | 6.86 |
4. 飞行试验
分别采用传统串级PID控制算法和串级TD-PID控制算法,对无人机进行姿态的实时控制,分析对比2种方法得到的试验数据.
表 3 共轴反桨无人机串级TD-PID控制器参数表
Tab.3
| 控制器 | | | | | | | | | |
| 俯仰/滚转通道 | 4.5 | 0.012 | 0.010 | 550 | 0.032 | 0.002 | 200 | 0.020 | 0.002 |
| 偏航通道 | 3.0 | 0.009 | 0.015 | 550 | 0.015 | 0.001 | 200 | 0.013 | 0.001 |
图 6

分析飞行试验数据可得,在串级TD-PID控制算法的控制下,共轴反桨无人机的整体飞行过程稳定. 由于飞行结构存在设计精度及外部环境扰动问题,无人机在飞行时会出现抖动现象. 结合图7分析,在使用串级PID控制算法时,无人机抖动明显、出现一定自旋现象,其中俯仰/滚转通道最大抖动角度控制误差超过4°,偏航通道角度控制误差为−3°~4°,且存在角度超过4°的连续抖动;在使用串级TD-PID控制算法时,无人机姿态角虽有小幅波动出现,但系统最大控制偏差小于0.90°,其中俯仰/滚转通道的角度抖动量最大为0.70°,偏航通道的角度抖动量最大为0.88°,其轻微抖动不影响飞行效果,整体飞行过程平稳,且满足设计指标中±1°的角度抖动量.
图 7
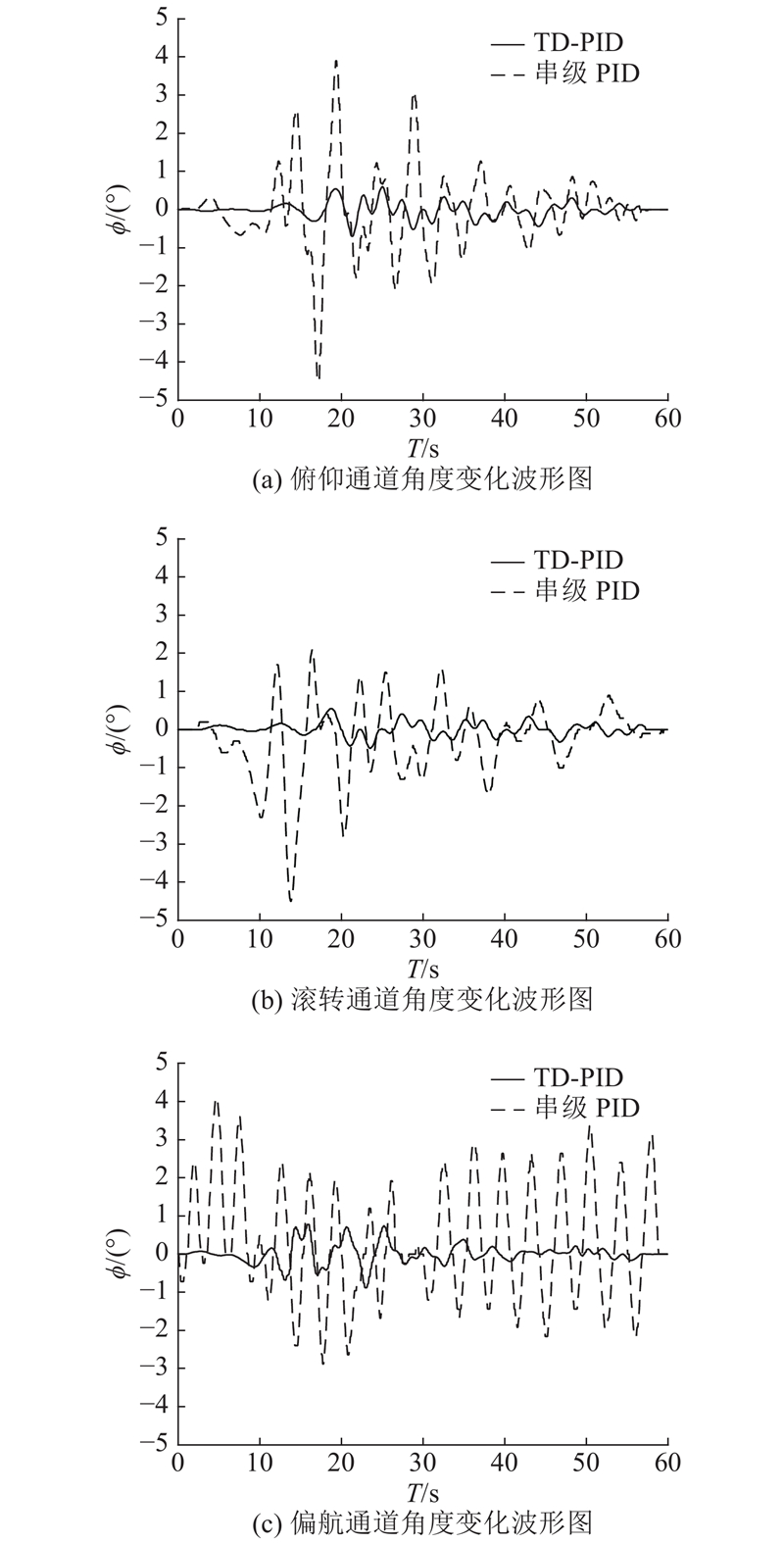
图 7 2种控制算法下飞行数据的波形对比
Fig.7 Waveform comparison of flight data under two control algorithms
5. 结 语
本研究提出基于微分跟踪器的串级TD-PID控制算法,对角速度环控制进行优化,减少系统的超调和震荡,实现共轴反桨无人机的稳定飞行. 通过仿真及飞行试验对比:串级TD-PID 控制算法的控制效果优于串级PID 控制算法,串级TD-PID控制器可实现姿态调节中系统响应时间和超调量之间的平衡,系统响应时间短,抗扰动能力强. 本研究仅使用离线辨识方法确定无人机传递函数,仿真试验未考虑时变性因素对无人机运行的影响. 本研究提出的串级TD-PID 控制算法,角度环使用传统PID控制器,其积分项易引起过饱和现象,下一步计划加入积分自适应因子优化角度环控制器,进一步提升系统稳态性能和抗扰动能力.
参考文献
四旋翼无人机飞行控制算法综述
[J].DOI:10.3969/j.issn.1671-637X.2018.12.012 [本文引用: 1]
An overview of flight control algorithms for quadrotors
[J].DOI:10.3969/j.issn.1671-637X.2018.12.012 [本文引用: 1]
The adaptive sliding mode control using improved genetic algorithm tuning PID controller for the planetary rover
[J].
Simulation of the quadcopter dynamics with LQR based control
[J].DOI:10.1016/j.matpr.2020.04.282
飞翼无人机机动飞行非线性反步控制律设计
[J].
Design of nonlinear backstepping controller for flying wing UAV maneuvering flight
[J].
Adaptive robust servo constraint tracking control for an underactuated quadrotor UAV with mismatched uncertainties
[J].DOI:10.1016/j.isatra.2020.07.007 [本文引用: 1]
Design of dual-range linear multivariable controllers for nonlinear systems with application to UAV control
[J].DOI:10.1061/(ASCE)AS.1943-5525.0000233 [本文引用: 1]
基于模糊控制的共轴飞行器姿态自稳算法
[J].
Coaxial aircraft auto-stabilization algorithm based on fuzzy control
[J].
共轴旋翼无人飞行器姿态控制
[J].DOI:10.3969/j.issn.1672-1497.2019.01.010 [本文引用: 1]
Attitude control of coaxial-rotor unmanned aerial vehicle
[J].DOI:10.3969/j.issn.1672-1497.2019.01.010 [本文引用: 1]
一种共轴双旋翼飞行器悬停控制联合仿真
[J].
Hover control co-simulation of a coaxial dual-rotor aircraft
[J].
Feedback linearization control for a tandem rotor UAV robot equipped with two 2-DOF tiltable coaxial-rotors
[J].DOI:10.1007/s10015-020-00655-x [本文引用: 1]
一种新型串列式双旋翼飞行器
[J].
A new type of tandem double-rotor copter
[J].
共轴双旋翼结构在多旋翼无人机教学活动中的应用分析
[J].DOI:10.3969/j.issn.1671-489X.2018.04.030 [本文引用: 1]
Analysis of coaxial double rotor structure of multi rotor UAV using in teaching activities
[J].DOI:10.3969/j.issn.1671-489X.2018.04.030 [本文引用: 1]
带机械臂四旋翼飞行器的控制方法研究
[J].
Research on control method for a quadrotor with mechanical arm
[J].
Research on fuzzy mathematics in PID control
[J].DOI:10.4028/www.scientific.net/AMM.608-609.875 [本文引用: 1]
微分跟踪器的研究与应用
[J].DOI:10.3969/j.issn.1000-3932.2013.04.012 [本文引用: 1]
Research and application of differential tracker
[J].DOI:10.3969/j.issn.1000-3932.2013.04.012 [本文引用: 1]
基于PID控制的多用途无人机模拟器的设计
[J].DOI:10.3969/j.issn.1002-5057.2020.06.004 [本文引用: 1]
Design of a multi-purpose drone simulator based on PID control
[J].DOI:10.3969/j.issn.1002-5057.2020.06.004 [本文引用: 1]
Nonlinear PID controller design for a 6-DOF UAV quadrotor system
[J].DOI:10.1016/j.jestch.2019.02.005 [本文引用: 1]
A comparison study of advanced tracking differentiator design techniques
[J].DOI:10.1016/j.proeng.2014.12.634 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}