

然而目前对于履带车辆机电液联合制动的研究主要针对的是中低制动强度的减速制动,紧急制动时使用的往往仍然是令各制动执行器输出最大制动扭矩的全制动策略[7],在路面附着情况较差时可能导致主动轮的抱死和履带的打滑. 在轮式混合动力及电动车辆领域中,Zhou等[8-10]针对新的传动结构将传统ABS系统进行了改进,Patra等[11-13]利用滑模控制,Bera等[14]使用相平面理论,Nadeau等[15]使用改进的线性二次高斯控制策略进行了紧急制动防抱死控制策略的理论和试验研究,并取得了较好的结果. Fan等[16]初步研究了基于滑模控制的传统履带车辆驱动力控制方法,然而由于传统机械式制动系统响应速度较为迟缓,针对研究对象使用同样的方法进行紧急制动控制难以取得理想的成果. 但随着将具有快速响应能力的电机加入到制动系统中,针对电驱动履带车辆应用先进紧急制动防抱死控制策略不再是不切实际的设想.
本研究建立紧急制动过程中双侧电机驱动履带车辆整车动力学及各重要子系统的模型,提出基于滑模鲁棒控制的滑移率控制算法、制动扭矩预分配规则及前馈制动扭矩动态补偿器构成的紧急制动防抱死控制策略,搭建基于dSPACE的半实物在环试验系统,并对本策略进行实时仿真和驾驶员在环试验验证.
1. 传动系统结构及建模
1.1. 动力传动系统结构
高速电驱动履带车辆的传动系统由柴油机-发电机组和能量存储单元组成的前功率链以及驱动电机、传动轴等组成的后功率链构成,其结构如图1所示. 这种车辆由2台电机分别经过各自的电机输出变速器及轮边减速器驱动两侧的主动轮. 每侧半轴上的轮边减速器与电机输出变速器之间均安装有机械制动器和液力缓速器. 电机、机械制动器和液力缓速器等传动系统的协同控制均由作为传动系统主控制器的传动控制器通过协调各设备控制器实现.
图 1
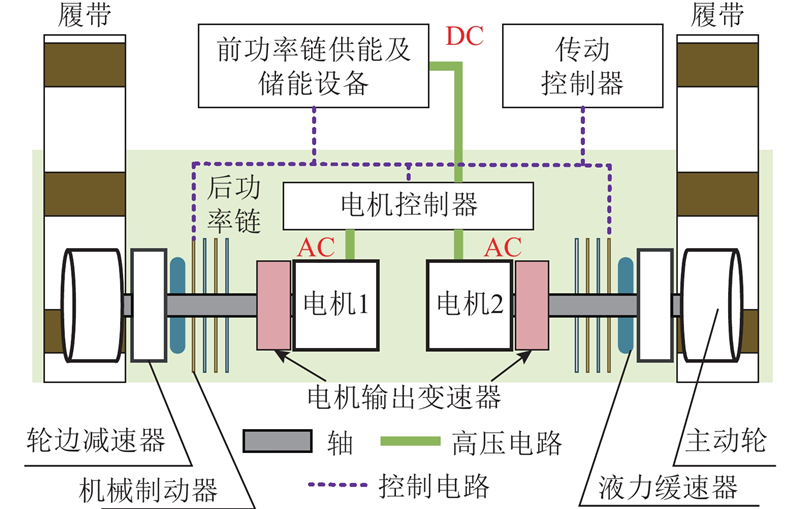
图 1 高速电驱动履带车辆动力传动系统结构
Fig.1 Schematic diagram of powertrain of high speed electric drive tracked vehicle
1.2. 整车动力学模型
履带车辆行走机构包括主动轮、履带、负重轮、导向轮和托带轮,其运动主要由车体的直线运动,主动轮的旋转运动,履带的回转运动及因其牵引而产生的负重轮、导向轮和托带轮的旋转运动组成. 在车辆行驶过程中,行走机构受到整车空气阻力、惯性负载及地面阻力的共同作用. 双侧电机驱动履带车辆及其行走机构在制动时的运动和受力情况如图2所示. 其中,Fx为履带受到的地面合力,Faero为空气阻力,M为车辆总重,vx为车速,J为主动轮及等效到其上的传动系统转动惯量,Ft为履带对主动轮的阻力,ω为主动轮的转速,r为主动轮工作半径,Tb为制动系统输出到主动轮的总制动扭矩,φA和φD分别为履带的接近角和离去角.
图 2
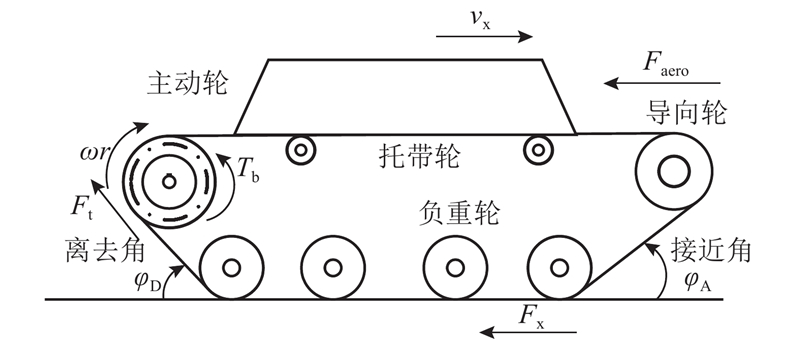
图 2 电驱动履带车辆制动工况受力情况
Fig.2 Schematic diagram of forces and torques acting on high speed electric drive tracked vehicle when braking
车辆车体及主动轮的动力学方程类似于轮式车辆,可表示为
式中
式中:Jeri为式(1)中的J与式(3)中各部分等效惯量之和,即旋转轴系与行走机构在主动轮处的等效惯量.
1.3. 制动执行器模型
对于车辆制动系统而言,扭矩输出能力及响应特性是影响其制动能力的最主要因素,因此本文对于电机、机械制动器和液力缓速器等制动执行器的核心关注点即为这2个方面. 但要注意的是,由于液力缓速器转速较低时无法提供稳定的制动扭矩,电机在转速较低时效率较低且发热严重,因此在车速较低时液力缓速器和电机应退出制动,进行制动控制策略开发时需要注意这些模型的适用转速范围.
1.4. 履带-地面模型
图 3
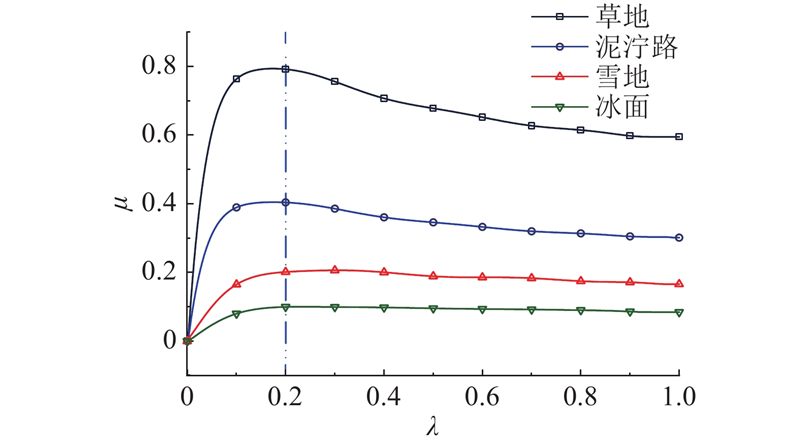
图 3 履带车辆典型中、低附着地面附着系数-滑移率曲线
Fig.3 Typical low and medium adhesion adhesion coefficient-slip rate curves of tracked vehicle
1.5. 驾驶员模型
在制动过程中,驾驶员通过踩踏制动踏板实现对车辆的制动控制. 在本研究范围内,驾驶员的输入主要为制动踏板输入. 制动踏板的输入往往被认为经过一个空行程后开始有意义,并且在行程超过一定值后被认为需要进行紧急制动. 因此,制动踏板在以上范围内的有效行程可以被解读为与需求制动减速度成正比:
式中:β为制动踏板行程百分比,abdem为需求制动减速度.
2. 机电液联合紧急制动防抱死控制策略
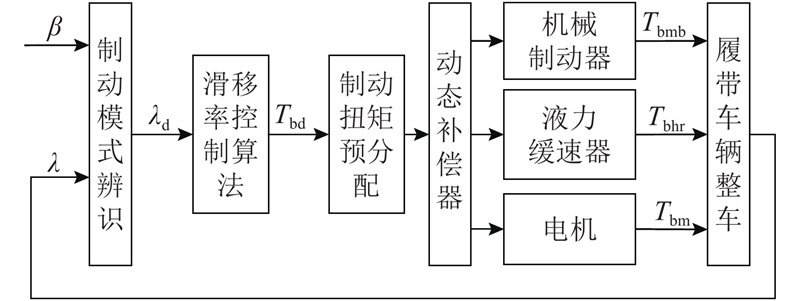
根据相关国家关于电驱动履带车辆的要求,车辆最大减速度应不小于5 m/s2[5],且该指标经常被选取为5.5 m/s25. 然而由图3可以看出,当车辆行驶在附着系数较低的地面上且制动强度较大时,会由于路面附着系数偏低产生主动轮抱死的现象,导致车辆减速度无法满足驾驶员制动需求. 因此,当车辆滑移率超过一定阈值时,应视同制动踏板超出常规范围,触发紧急制动. 同时,应有适当的紧急制动控制策略防止履带及主动轮抱死. 本文提出的机电液联合制动防抱死控制策略控制系统框图如图4所示. 图中,λd为需求滑移率,Tbd为等效到主动轮的总需求制动扭矩,Tbmb为等效到主动轮的实际机械制动扭矩,Tbhr为等效到主动轮的实际液力缓速器扭矩,Tbm为等效到主动轮的实际电机制动扭矩. 制动模式辨识模块读取制动踏板开度β及车辆滑移率λ,决定是否触发紧急制动防抱死控制策略. 当需要执行此策略时,滑移率控制算法根据需求滑移率λd和车辆状态计算出需求制动扭矩Tbd,经过制动扭矩预分配和动态补偿后,3种制动执行器分别按照接收各自需求制动扭矩输入,并输出相应制动扭矩.
图 4
2.1. 针对滑移率的滑模控制算法
滑模控制具有响应快速、对扰动不敏感、物理实现简单的特点,适用于车载控制系统. 履带接地面滑移率对时间的导数可以表示为
将ω视作式(2)中定义的滑移率λ的函数,并把式(4)中
其中,
是关于车辆加速度
因此误差的界可表示为
其中,
将滑模面ss定义为实际滑移率与需求滑移率的差值,则滑模面与其导数可以表示为
为了在ss较大时达到较大的收敛速度,在ss较小时减少抖振,可以选取指数趋近律作为滑模趋近率. 考虑到履带车辆的最佳滑移率是一个常数,因此采用指数趋近律:
其中,sign(ss)是ss的符号函数,常数k应较大,ε应较小. 滑模控制律,即等效到主动轮上的总需求制动扭矩Tbd可由此设计为
其中,fc是一个与
根据式(10)定义的
因此,总需求制动扭矩Tbd的表达式可修正为
为减少抖振,可以使用饱和函数sat(ss)替换式(16)中的符号函数.
2.2. 制动扭矩预分配规则
式(16)推导出的总需求制动扭矩在制动过程中会随着车辆状态反馈快速变化,如果总制动扭矩不能够及时地跟随,制动效果将大打折扣. 同时,各制动执行器的响应特性和扭矩输出能力有着较大的不同,因此,需要将制动力合理地分配到各执行器. 本研究中制定的制动扭矩预分配规则如图5所示. 图中,制动扭矩的分配逻辑如下:
图 5
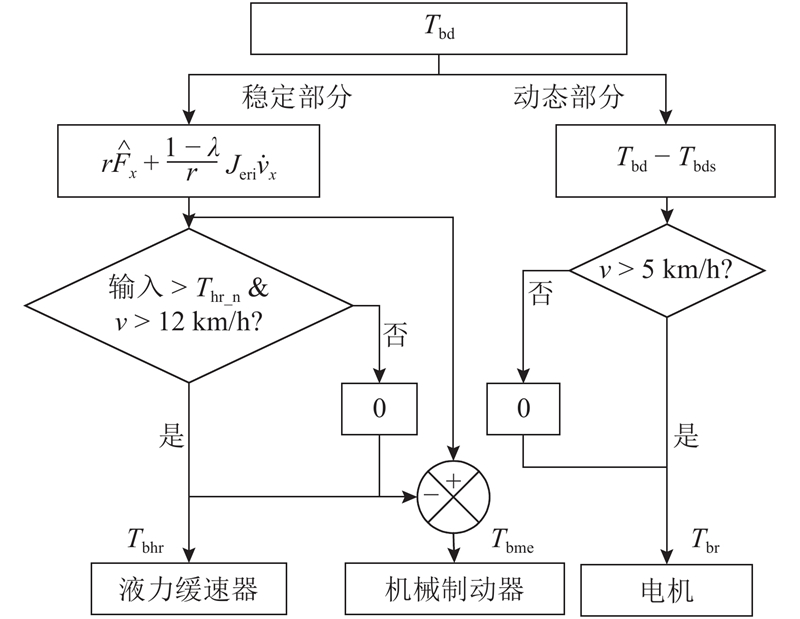
1)从总制动扭矩中提取出变化相对缓慢的稳定部分:
2)当需求总制动扭矩的稳定部分大于液力缓速器在当前转速下的输出扭矩Thr_n时,液力缓速器介入制动,并由机械制动器补偿剩余部分,否则稳定部分完全由机械制动器提供;
3)液力缓速器在车速小于12 km/h时停止工作,电机在车速小于5 km/h时停止扭矩输出;
4)为了尽可能保证能量回收,电机在制动过程中不输出驱动扭矩.
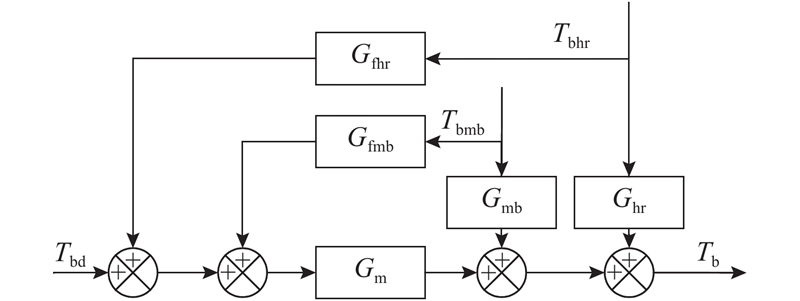
2.3. 制动扭矩动态补偿器
机械制动器、液力缓速器和电机的动态响应特性有着较大的差别,仅仅通过制动扭矩预分配仍然无法完全保证联合制动系统的响应特性和匹配特性. 因为制动策略的输入已经引入了制动滑移率作为反馈,所以可以将总需求制动扭矩作为目标输入,将机械制动器及液力缓速器扭矩作为扰动量,通过前馈补偿控制器控制电机制动扭矩动态协调总制动扭矩. 控制器控制策略如图6所示. 其中,Gfbhr(s)、Gfmb(s)分别为液力缓速器和机械制动器制动扭矩的前馈传递函数,Ghr(s)、Gmb(s)、Gm(s)分别为液力缓速器、机械制动器和电机的传递函数,由此可以得到等效到主动轮的电机制动扭矩为
图 6
3. 半实物在环试验系统搭建
半实物在环试验系统由驾驶员输入分系统、试验管理分系统和实时仿真分系统组成,其结构如图7所示.
图 7

驾驶员输入分系统采集驾驶员加速踏板与制动踏板开度,并将其转换为模拟信号,通过dSPACE的DS2680 I/O模块输入到实时仿真分系统;试验管理分系统与实时仿真分系统通过以太网连接,试验人员可以通过此系统修改车辆模型、控制策略,并将DS2671总线板卡中的两路CAN接口分别作为虚拟传动控制器和车辆模型中各设备控制器与驱动器的接口,模拟实车通讯网络. 半实物在环试验系统的通讯及控制结构如图8所示.
图 8
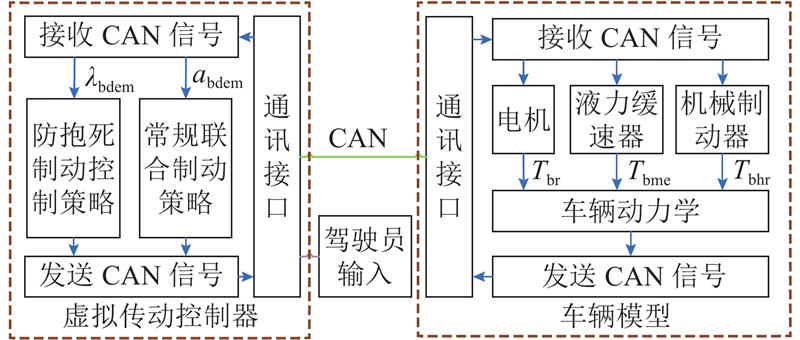
图 8 半实物在环(SPIL)试验系统通讯与控制结构
Fig.8 Communication and control structure of SPIL test system
4. 实时仿真与驾驶员在环试验
4.1. 仿真与试验配置
根据履带-地面模型和相关标准[5]可知,履带车辆在较高附着系数的地面上紧急制动时并不会产生履带及主动轮抱死现象,因此,本文选择附着系数较低的雪地进行实时仿真和驾驶员在环试验.
分别在相同工况下使用提出的防抱死制动控制策略和传统的全制动策略进行实时仿真. 在进行实时仿真时,切断驾驶员输入分系统的输入,由实时仿真分系统中预设的油门和制动踏板开度替代驾驶员输入进行仿真. 当车辆加速到80 km/h时,油门踏板开度在10 ms内降低为0,制动踏板开度在同一时间内上升到100%. 仿真选择制动时间t、制动距离S、平均滑移率
在进行驾驶员在环试验时,将驾驶员输入分系统的踏板开度信号接入实时仿真分系统,由驾驶员操作,在车速达到80 km/h后松开油门踏板,并以中等速度将制动踏板踩到底.
用于仿真和试验的车辆主要参数如表1所示. 表中,A为车辆迎风面积,CD为车辆风阻系数,Jrw、Jsr和JI分别为负重轮、托带轮和导向轮的转动惯量,nrw、nsr分别为车辆单侧负重轮和托带轮的数量.
表 1 履带车辆主要参数表
Tab.1
| 参数 | 数值 | 单位 | 参数 | 数值 | 单位 | |
| M | 52 000 | kg | φA | 27.3 | ° | |
| r | 0.309 | m | φD | 35.6 | ° | |
| A | 5.36 | m2 | CD | 1 | − | |
| J | 158.8 | kg∙m2 | JI | 31.2 | kg∙m2 | |
| Jrw | 23.7 | kg∙m2 | nrw | 6 | − | |
| Jsr | 13 | kg∙m2 | nsr | 3 | − |
4.2. 实时仿真结果与分析
表 2 仿真结果与评价指标
Tab.2
| 评价指标 | t/s | S/m | | σ | E/kWh |
| 全制动 | 10.295 | 112.433 | 0.907 | 0.742 | 0.176 |
| 防抱死制动 | 9.061 | 100.366 | 0.189 | 0.029 | 0.119 |
图 9
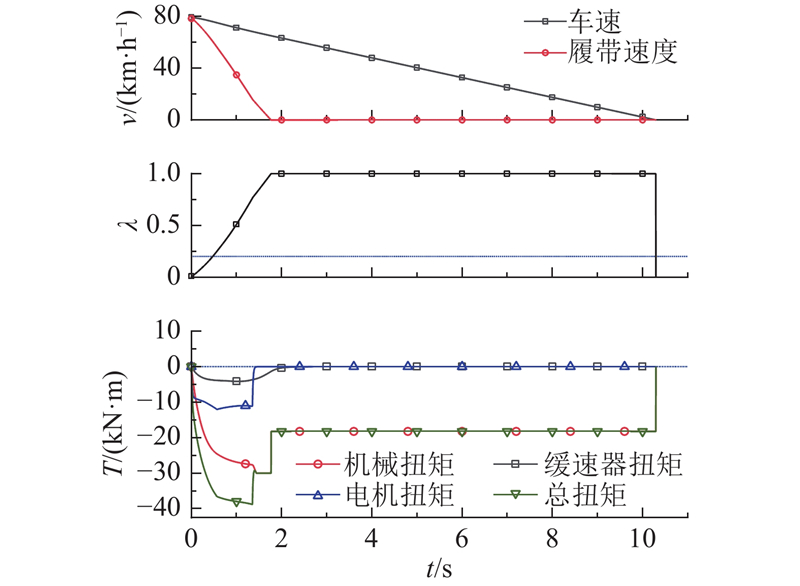
图 10
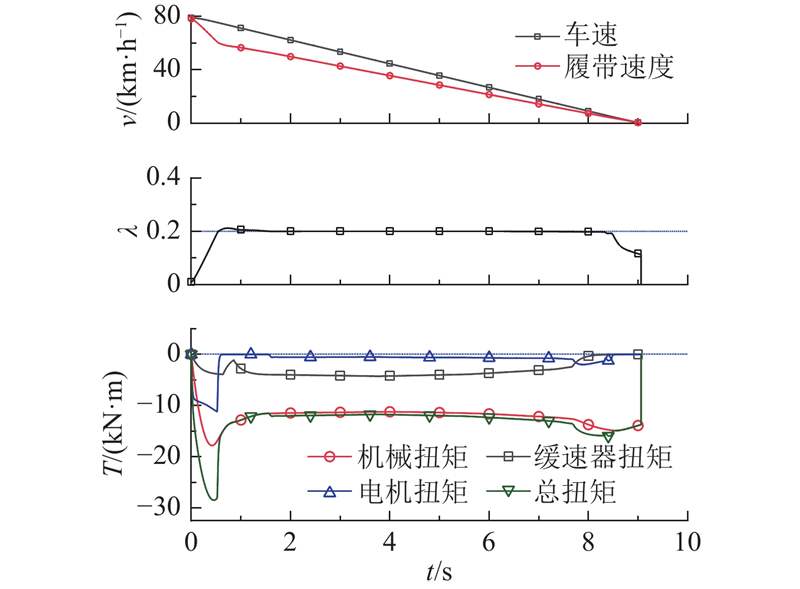
图 10 防抱死制动策略实时仿真结果
Fig.10 Real-time simulation results of anti-lock braking strategy
当使用全制动策略时,踩下制动踏板,液力缓速器投入使用,电机和机械制动器均以大制动扭矩输出,仅仅1.767 s后履带和主动轮便进入了完全抱死状态. 在使用防抱死控制策略时,当控制器检测到车辆滑移率超出最佳滑移率有失稳的趋势时,便控制各执行机构制动扭矩按照控制策略的输出实时调整输出扭矩,控制车辆滑移率始终保持在0.19~0.21,最大化地利用地面的摩擦阻力进行制动.
4.3. 驾驶员在环试验与分析
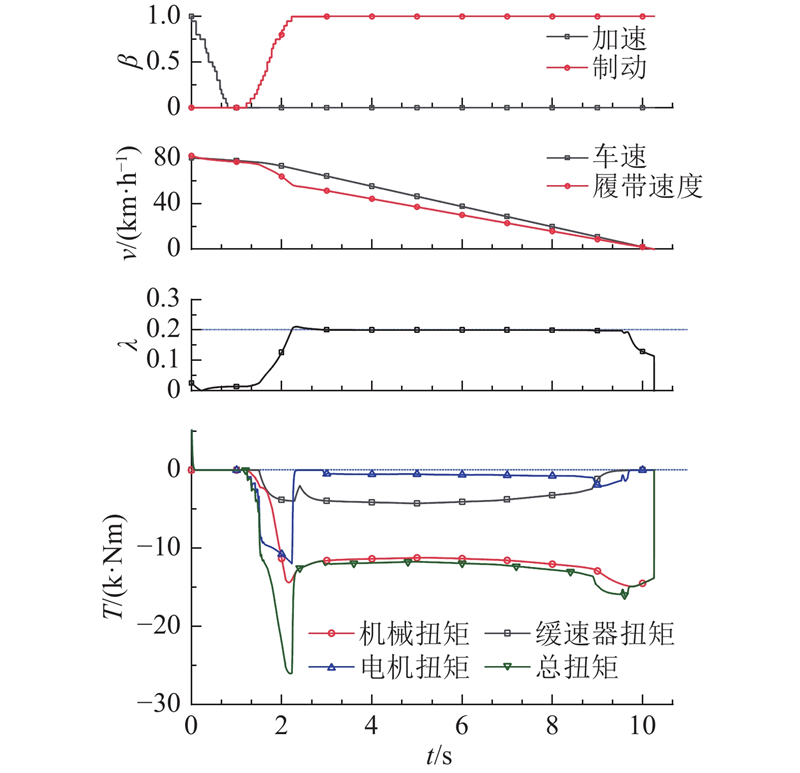
使用防抱死制动策略进行驾驶员在环试验的结果如图11所示. 可以看出,随着制动踏板开度不断增大,总制动扭矩及车辆滑移率也随之增加,直到滑移率超过阈值触发防抱死制动控制策略,开始由传动控制器协调控制各制动执行机构根据当前车辆状态,按照控制策略的指令实时输出相应的制动扭矩. 在液力缓速器和电机退出制动过程之前,滑移率的波动能够被控制在5%以内,验证了本文提出的联合防抱死制动控制策略的有效性.
图 11
5. 结 语
本文建立了高速电驱动履带车辆的传动和制动系统的模型,并针对这种车辆的特点提出了一种机电液联合的紧急制动防抱死控制策略. 本策略能够针对3种制动执行机构响应特性和扭矩输出能力的不同,将所需制动扭矩动态分配,保证了系统的响应和扭矩跟随能力. 搭建了基于dSPACE的硬件在环试验系统,通过实时仿真、驾驶员在环试验及与传动的全制动策略的对比,验证了提出的机电液联合紧急制动防抱死控制策略的有效性,为进一步的研究及实车应用奠定了基础.
参考文献
电传动履带车辆双侧驱动快速控制原型开发
[J].DOI:10.3969/j.issn.1001-0645.2007.01.008 [本文引用: 1]
Rapid control prototype development of dual-motor drive electric tracked vehicle
[J].DOI:10.3969/j.issn.1001-0645.2007.01.008 [本文引用: 1]
履带车辆双侧电机驱动系统匹配设计
[J].
Matching design of the drive system in a dual-motor drive tracked vehicle
[J].
履带车辆电传动系统两段式机电联合制动策略研究
[J].DOI:10.3969/j.issn.1009-4687.2010.03.008 [本文引用: 1]
Study on two-segment electric-mechanical composite braking strategy of tracked vehicle hybrid transmission system
[J].DOI:10.3969/j.issn.1009-4687.2010.03.008 [本文引用: 1]
高速电驱动履带车辆联合制动转矩动态协调控制研究
[J].DOI:10.3969/j.issn.1000-1093.2017.05.024 [本文引用: 2]
Coordinated control of high speed electric drive tracked vehicle
[J].DOI:10.3969/j.issn.1000-1093.2017.05.024 [本文引用: 2]
高速电驱动履带车辆联合制动实时仿真研究
[J].
Research on real time simulation of composite braking for high speed electric drive tracked vehicle
[J].
Transient switching control strategy from regenerative braking to anti-lock braking with a semi-brake-by-wire system
[J].DOI:10.1080/00423114.2015.1129059 [本文引用: 1]
A high performance pneumatic braking system for heavy vehicles
[J].
Bond graph model-based evaluation of a sliding mode controller for a combined regenerative and antilock braking system
[J].DOI:10.1177/2041304110394558 [本文引用: 1]
履带车辆台架试验台负载模拟方法研究
[J].DOI:10.3969/j.issn.1000-3835.2013.09.013 [本文引用: 1]
Load emulation of track vehicle on test bed
[J].DOI:10.3969/j.issn.1000-3835.2013.09.013 [本文引用: 1]
Design and modeling of a test bench for dual-motor electric drive tracked vehicles based on a dynamic load emulation method
[J].DOI:10.3390/s18071993 [本文引用: 1]
Magic formula tyre model with transient properties
[J].
Dynamic friction models for longitudinal road/tire interaction: theoretical advances
[J].DOI:10.1076/vesd.39.3.189.14152 [本文引用: 1]
高速履带车辆制动能量与制动力分布规律预测方法研究
[J].DOI:10.3969/j.issn.1000-1093.2019.05.002
Research on forecasting methods of braking energy /force distribution for high speed tracked vehicles
[J].DOI:10.3969/j.issn.1000-1093.2019.05.002
履带车辆水泥路面的牵引力-滑转率关系的计算与试验
[J].
Calculation and test of relationship between traction force and slip ratio for tracked vehicles on concrete ground
[J].
履带车辆地面牵引力的计算与试验验证
[J].
Calculation and testing verification of ground traction of tracked vehicles
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}