|
|
|
| Target tracking algorithm based on channel reliability and aberrance repression |
Qiang GUO1,2( ),Tian-hao WU1,2,Wei XU1,2,Mykola KALIUZHNY1,3 ),Tian-hao WU1,2,Wei XU1,2,Mykola KALIUZHNY1,3 |
1. College of Information and Communication Engineering, Harbin Engineering University, Harbin 150001, China
2. Key Laboratory of Advanced Marine Communication and Information Technology, Ministry of Industry and Information Technology, Harbin 150001, China
3. Kharkiv National University of Radio Electronics, Kharkiv 61166, Ukraine |
|
|
|
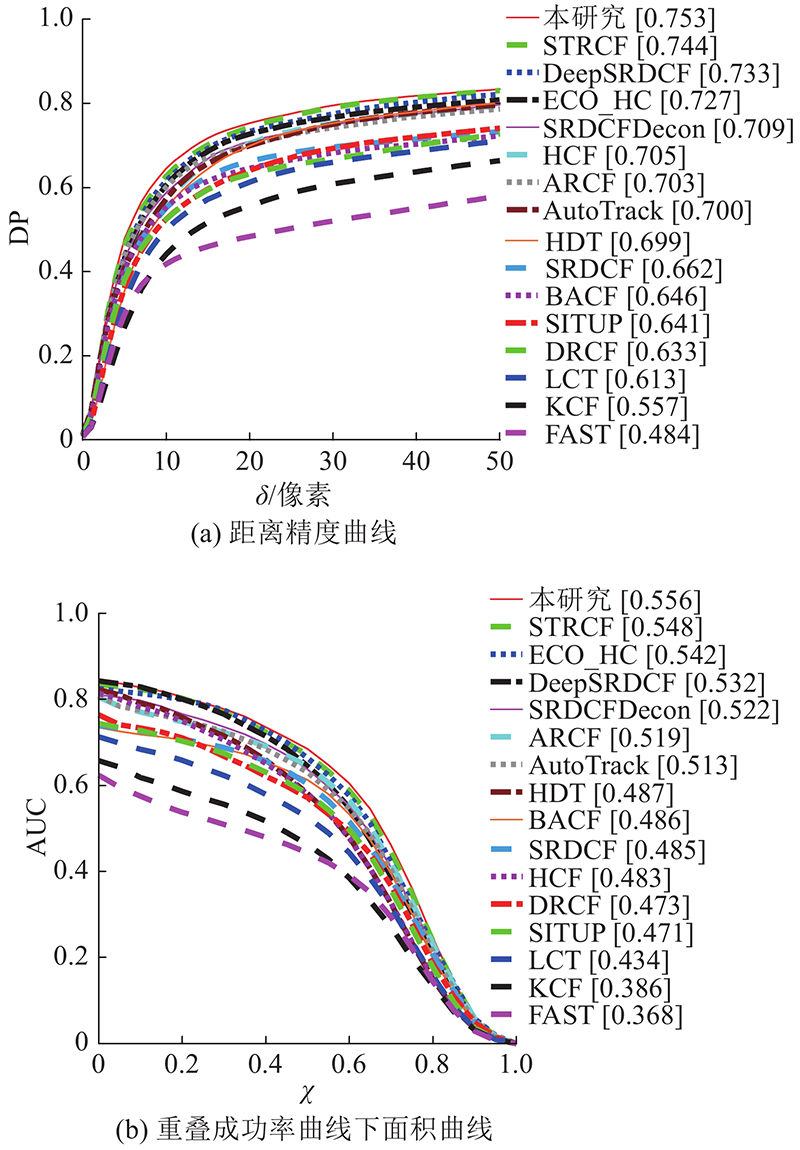
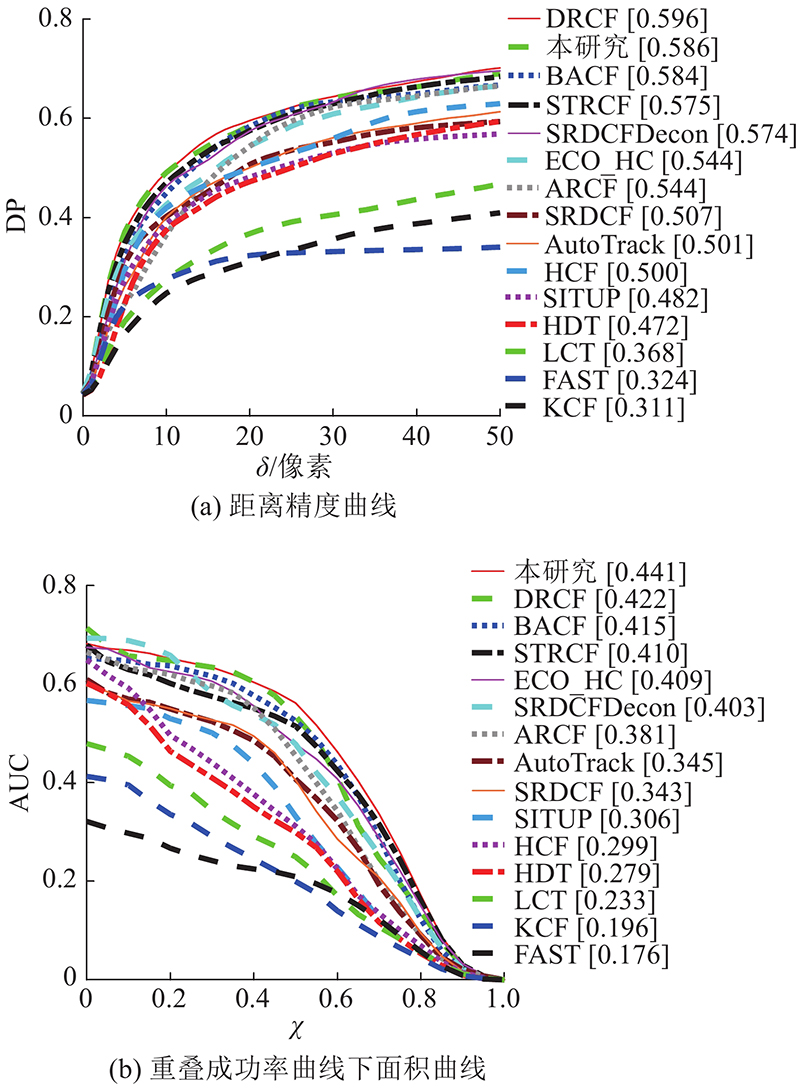
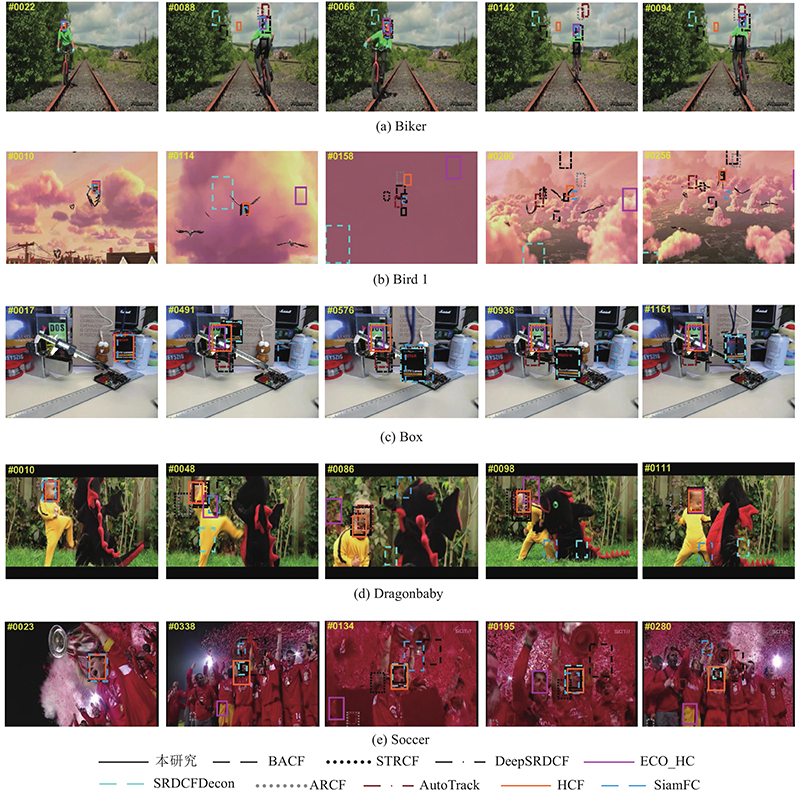
Abstract A target tracking algorithm based on channel reliability and aberrance repression was proposed, aiming at the problem that the spatial-temporal regularized target tracking algorithm could not effectively use features and the filter was inclined to learn from the background since the algorithm expanded the search area in order to alleviate the boundary effect. The channel regularization term was constructed, and the corresponding weights of different feature channels were solved in the training stage to realize the weighting of different feature channels, which reduced channel redundancy and improved the positioning accuracy. The aberrance repression regularization term was added to the objective function to constrain the response map of the current frame and realize the smooth constraint of the filter model. The alternating direction multiplier method was used to transform the objective problem into the optimal solution of the filter, auxiliary factor and channel weight. The proposed method was tested on public datasets such as OTB2015, TempleColor128 and UAV20L, and compared with other tracking algorithms. Experimental results show that the tracking effect of the proposed algorithm is stable under fast motion as well as illumination variation, and it basically meets the real-time requirements.
|
|
Received: 25 September 2021
Published: 03 January 2023
|
|
|
| Fund: 国家重点研发计划资助项目(2018YFE0206500);国家自然科学基金资助项目(62071140);国家国际科技合作专项资助项目(2015DFR10220) |
基于通道可靠性和异常抑制的目标跟踪算法
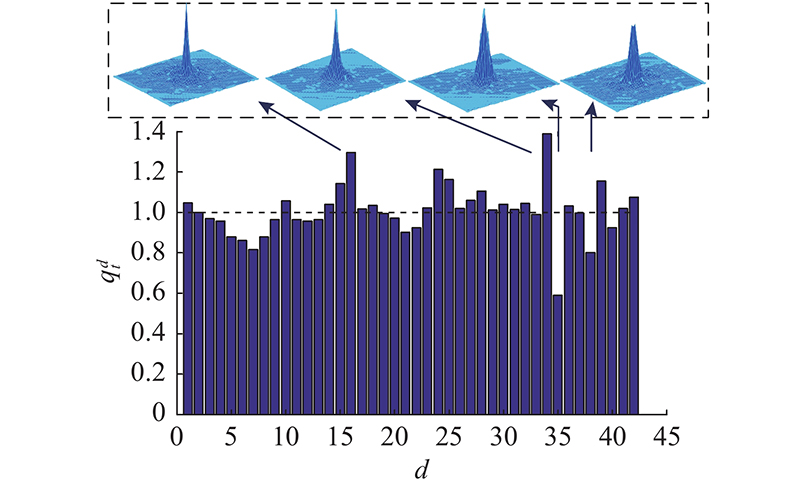
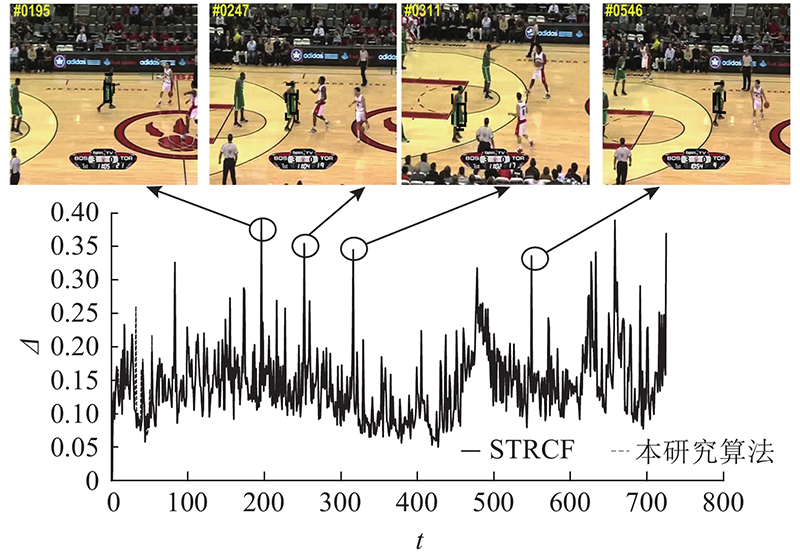
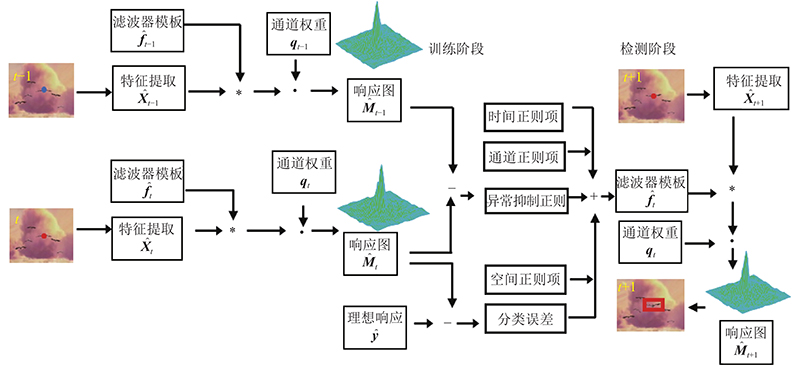
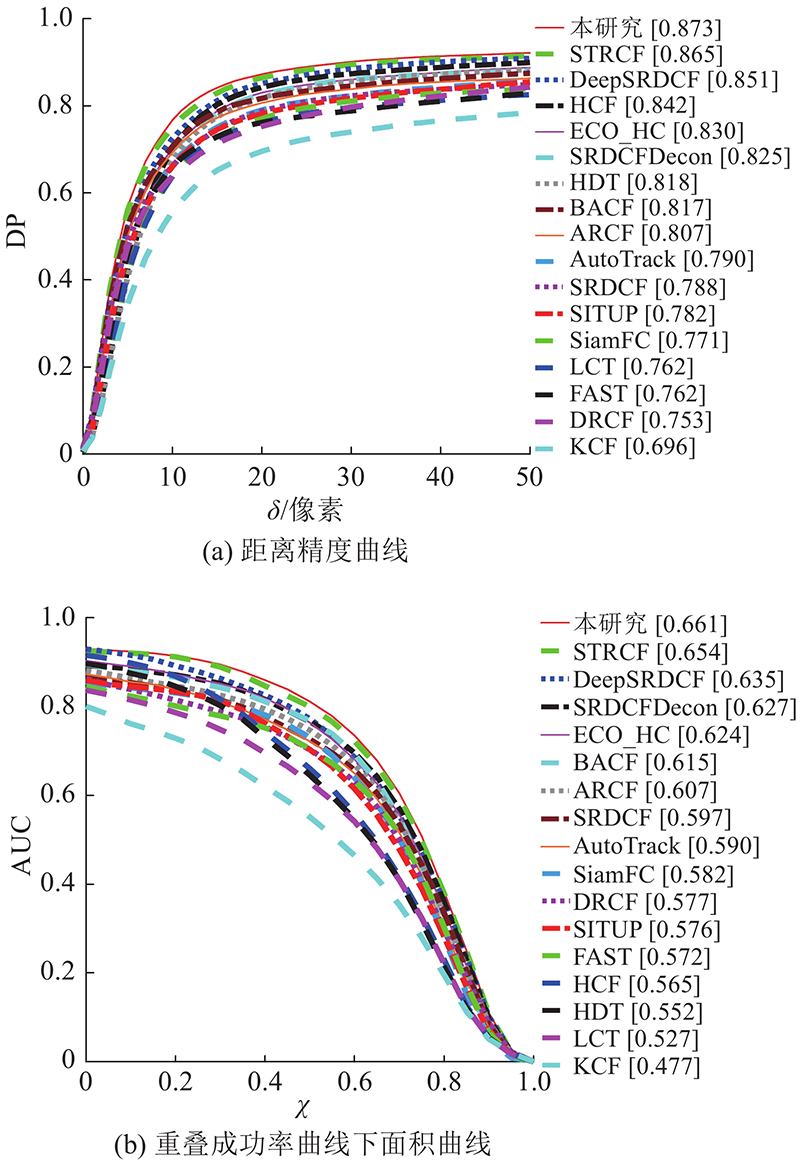
针对时空正则目标跟踪算法无法有效利用特征,为了缓解边界效应扩大搜索区域导致的滤波器倾向于从背景中学习的问题,提出基于通道可靠性和异常抑制的目标跟踪算法. 构造通道正则项,在训练阶段求解不同特征通道对应的权重,实现对不同特征通道的加权,降低通道冗余并提高定位精度.在目标函数中加入异常抑制正则项,约束当前帧的响应图,实现滤波器模型的平滑约束. 利用交替方向乘子法将求解目标问题转化为求滤波器、辅助因子以及通道权重的最优解. 将所提算法在OTB2015、TempleColor128以及UAV20L公开数据集测试并与其他跟踪算法进行对比. 实验结果表明,所提算法在快速运动、光照变化场景中的跟踪效果稳定,基本满足实时性要求.
关键词:
目标跟踪,
时空正则,
通道正则,
异常抑制,
交替方向乘子法
|
|
| [1] |
黄月平, 李小锋, 杨小冈, 等 基于相关滤波的视觉目标跟踪算法新进展[J]. 系统工程与电子技术, 2021, 43 (8): 2051- 2065
HUANG Yue-ping, LI Xiao-feng, YANG Xiao-gang, et al Advances in visual object tracking algorithm based on correlation filter[J]. Systems Engineering and Electronics, 2021, 43 (8): 2051- 2065
doi: 10.12305/j.issn.1001-506X.2021.08.05
|
|
|
| [2] |
BOLME D S, BEVERIDGE J R, DRAPER B A, et al. Visual object tracking using adaptive correlation filters [C]// 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. San Francisco: IEEE, 2010: 2544-2550.
|
|
|
| [3] |
HENRIQUES J F, CASEIRO R, MARTINS P, et al High-speed tracking with kernelized correlation filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37 (3): 583- 596
doi: 10.1109/TPAMI.2014.2345390
|
|
|
| [4] |
DANELLJAN M, KHAN F S, FELSBERG M, et al. Adaptive color attributes for real-time visual tracking [C]// 2014 IEEE Conference on Computer Vision and Pattern Recognition. Columbus: IEEE, 2014: 1090-1097.
|
|
|
| [5] |
WANG N Y, SHI J P, YEUNG D Y, et al. Understanding and diagnosing visual tracking systems [C]// 2015 IEEE International Conference on Computer Vision. Santiago: IEEE, 2015: 3101-3109.
|
|
|
| [6] |
汤张泳, 吴小俊, 朱学峰 多空间分辨率自适应特征融合的相关滤波目标跟踪算法[J]. 模式识别与人工智能, 2020, 33 (1): 66- 74
TANG Zhang-yong, WU Xiao-jun, ZHU Xue-feng Object tracking with multi-spatial resolutions and adaptive feature fusion based on correlation filters[J]. Pattern Recognition and Artifical Intelligence, 2020, 33 (1): 66- 74
doi: 10.16451/j.cnki.issn1003-6059.202001008
|
|
|
| [7] |
熊昌镇, 王润玲, 邹建成 基于多高斯相关滤波的实时跟踪算法[J]. 浙江大学学报:工学版, 2019, 53 (8): 1488- 1495
XIONG Chang-zhen, WANG Run-ling, ZOU Jian-cheng Real-time tracking algorithm based on multiple Gaussian-distirbution correlation filters[J]. Journal of Zhejiang University: Engineering Science, 2019, 53 (8): 1488- 1495
|
|
|
| [8] |
GALOOGAHI H K, FAGG A, LUCEY S. Learning backg- round-aware correlation filters for visual tracking [C]// 2017 IEEE International Conference on Computer Vision. Venice: IEEE, 2017: 1144-1152.
|
|
|
| [9] |
DANELLJAN M, HÄGER G, KHAN F S, et al. Learning spatially regularized correlation filters for visual tracking [C]// 2015 IEEE International Conference on Computer Vision. Santiago: IEEE, 2015: 4310-4318.
|
|
|
| [10] |
LI F, TIAN C, ZUO W M, et al. Learning spatial-temporal regularized correlation filters for visual tracking [C]// 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City: IEEE, 2018: 4904-4913.
|
|
|
| [11] |
尹明锋, 薄煜明, 朱建良, 等. 基于通道可靠性的多尺度背景感知相关滤波跟踪算法[J]. 光学学报. 2019, 39(5): 0515002.
YIN Ming-feng, BO Yu-ming, ZHU Jian-liang, et al. Multi-scale context-aware correlation filter tracking algorithm based on channel reliability [J]. Acta Optica Sinica, 2019, 39(5): 0515002.
|
|
|
| [12] |
LU X K, MA C, NI B B, et al Adaptive region proposal with channel regularization for robust object tracking[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2021, 31 (4): 1268- 1282
doi: 10.1109/TCSVT.2019.2944654
|
|
|
| [13] |
XU T Y , FENG Z H, WU X J, et al. Joint group feature selection and discriminative filter learning for robust visual obj-ect tracking [C]// 2019 IEEE/CVF International Conference on Computer Vision. Seoul: IEEE, 2019: 7950-7960.
|
|
|
| [14] |
YE J J, FU C H, LIN F L, et al Multi-regularized correlation filter for UAV tracking and self-localization[J]. IEEE Transactions on Industrial Electronics, 2021, 6004- 6014
|
|
|
| [15] |
WANG M M, LIU Y, HUANG Z Y. Large margin object tracking with circulant feature maps [C]// 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu: IEEE, 2017: 4800-4808.
|
|
|
| [16] |
HUANG Z Y, FU C H, LI Y M, et al. Learning aberrance repressed correlation filters for real-time UAV tracking [C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Seoul: IEEE, 2019: 2891-2900.
|
|
|
| [17] |
LI Y M, FU C H, DING F Q, et al. AutoTrack: towards high-performance visual tracking for UAV with automatic spatio-temporal regularization [C]// 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Seattle: IEEE, 2020: 11920-11929.
|
|
|
| [18] |
姜文涛, 刘晓璇, 涂潮, 等 空间异常适应性的目标跟踪[J]. 模式识别与人工智能, 2021, 34 (5): 473- 484
JIANG Wen-tao, LIU Xiao-xuan, TU Chao, et al Spatially abnormal adaptive target tracking[J]. Pattern Recognition and Artificial Intelligence, 2021, 34 (5): 473- 484
doi: 10.16451/j.cnki.issn1003-6059.202105010
|
|
|
| [19] |
BOYD S, PARIKH N, CHU E, et al Distributed optimization and statistical learning via the alternating direction method of multipliers[J]. Foundations and Trends in Machine Leaning, 2010, 3 (1): 1- 122
doi: 10.1561/2200000016
|
|
|
| [20] |
WU Y, LIM J, YANG M H Object tracking benchmark[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37 (9): 1834- 1848
doi: 10.1109/TPAMI.2014.2388226
|
|
|
| [21] |
LIANG P P, BLASCH E, LING H B. Encoding color info- rmation for visual tracking: algorithms and benchmark [J]. IEEE Transactions on Image Processing, 2015, 24(12): 5630-5644.
|
|
|
| [22] |
MUELLER M, SMITH N, GHANEM B. A benchmark and simulator for UAV tracking [C]// 2016 European Conference on Computer Vision. Amsterdam: Springer, 2016: 445–461.
|
|
|
| [23] |
MA C, HUANG J B, YANG X, et al. Hierarchical convolutional features for visual tracking [C]// 2015 IEEE International Conference on Computer Vision. Santiago: IEEE, 2015: 3074-3082.
|
|
|
| [24] |
QI Y, ZHANG S, QIN L, et al. Hedged deep tracking [C]// 2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2016: 4303-4311.
|
|
|
| [25] |
DANELLJAN M, HÄGER G, KHAN F S, et al. Convolutional features for correlation filter based visual tracking [C]// 2015 IEEE International Conference on Computer Vision Workshop. Santiago: IEEE, 2015: 621-629.
|
|
|
| [26] |
DANELLJAN M, BHAT G, KHAN F S, et al. ECO: efficient convolution operators for tracking [C]// 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu: IEEE, 2017: 6931-6939.
|
|
|
| [27] |
DANELLJAN M, HÄGER G, KHAN F S, et al. Adaptive decontamination of the training set: a unified formulation for discriminative visual tracking [C]// 2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas : IEEE, 2016: 1430-1438.
|
|
|
| [28] |
MA C, YANG X K, ZAHNG C Y, et al. Long-term correlation tracking [C]// 2015 IEEE Conference on Computer Vision and Pattern Recognition. Boston: IEEE, 2015: 5388-5396.
|
|
|
| [29] |
MA H Y, ACTON S T, LIN Z L SITUP: scale invariant tracking using average peak-to-correlation energy[J]. IEEE Transactions on Image Processing, 2020, 29: 3546- 3557
doi: 10.1109/TIP.2019.2962694
|
|
|
| [30] |
MA H Y, LIN Z L, ACTON S T FAST: fast and accurate scale estimation for tracking[J]. IEEE Signal Processing Letters, 2020, 27: 161- 165
doi: 10.1109/LSP.2019.2963147
|
|
|
| [31] |
FU C H, XU J T, LIN F L, et al Object saliency-aware dual regularized correlation filter for real-time aerial tracking[J]. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58 (12): 8940- 8951
doi: 10.1109/TGRS.2020.2992301
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|