|
|
|
| Design and optimization of large range 2-DOF micro-positioning clamping system |
Miao LIN1,2( ),Yong-jian JU1,2,Gang MENG1,2,Kun WANG1,2,*(),Yi CAO1,2 ),Yong-jian JU1,2,Gang MENG1,2,Kun WANG1,2,*(),Yi CAO1,2 |
1. School of Mechanical Engineering, Jiangnan University, Wuxi 214122, China
2. Jiangsu Key Laboratory of Advanced Food Manufacturing Equipment and Technology, Jiangnan University, Wuxi 214122, China |
|
|
|
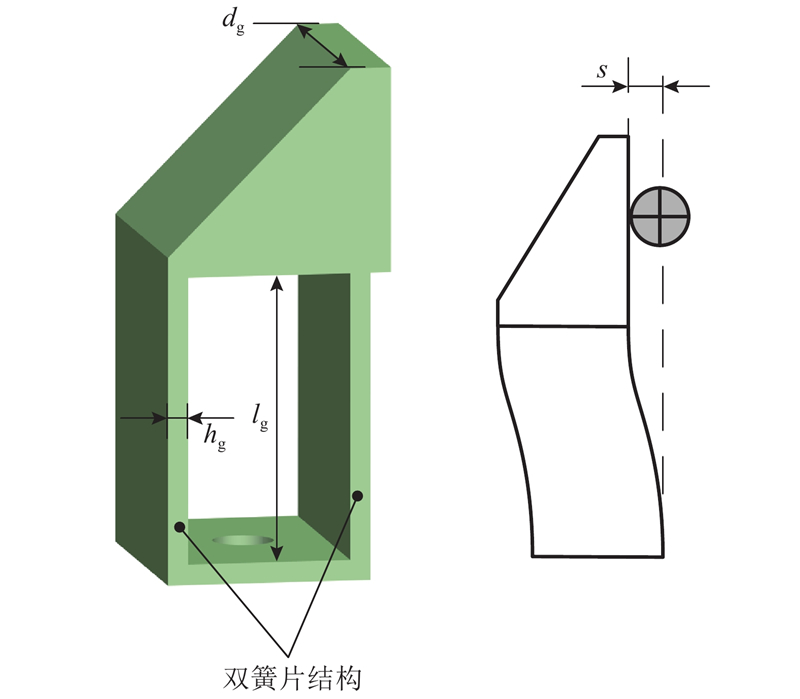
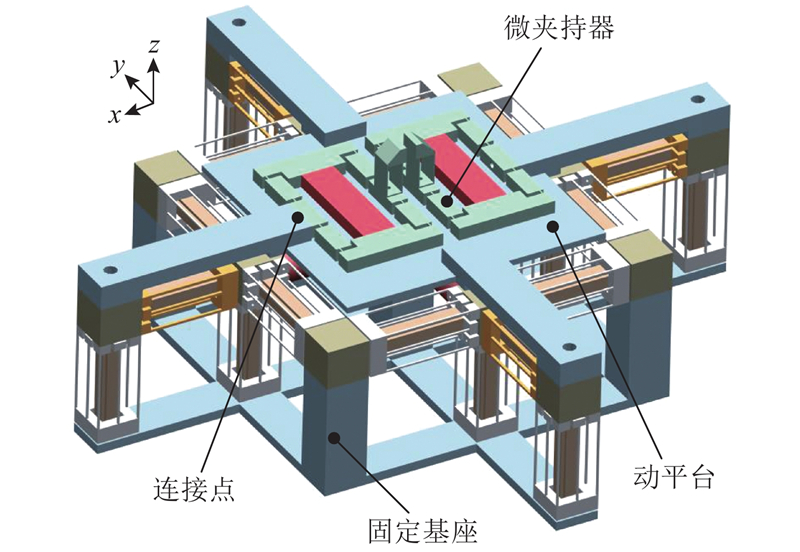
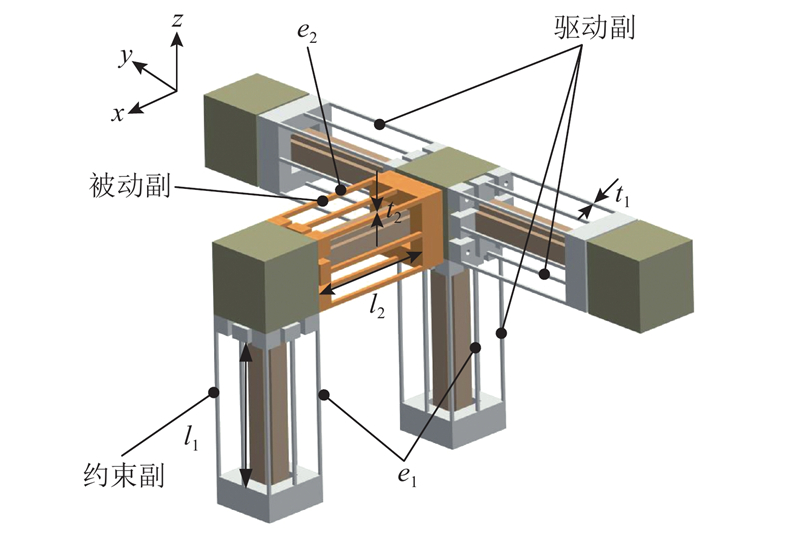
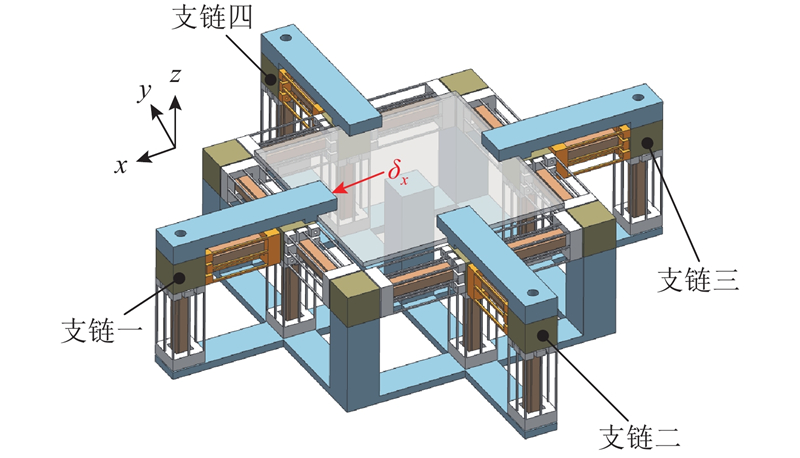
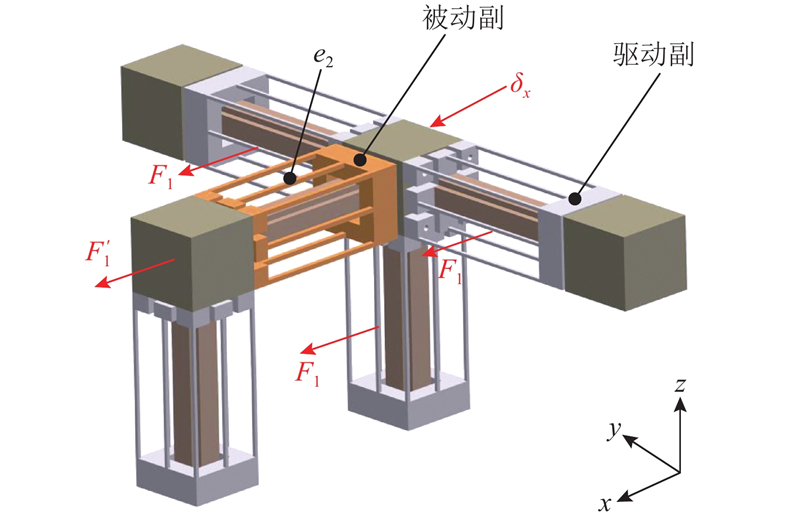
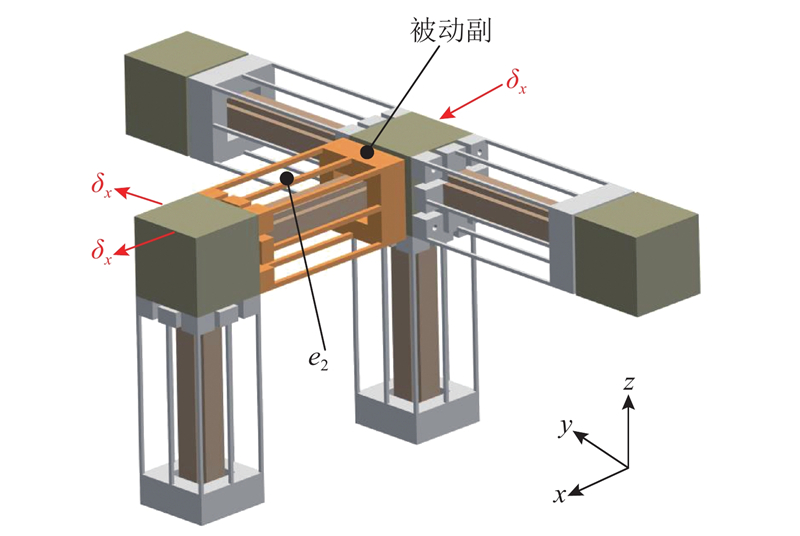
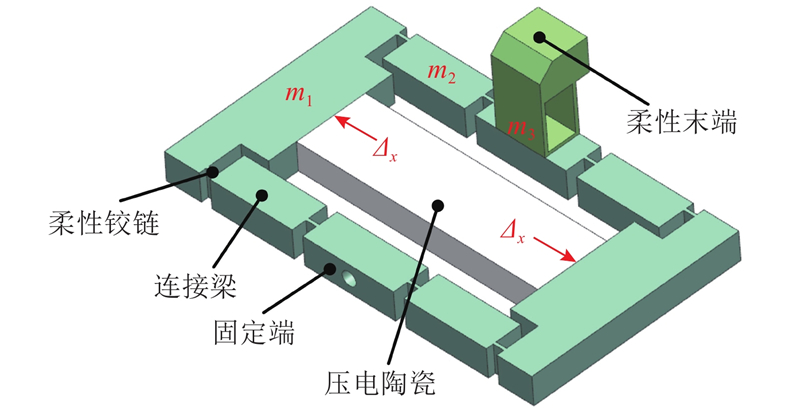
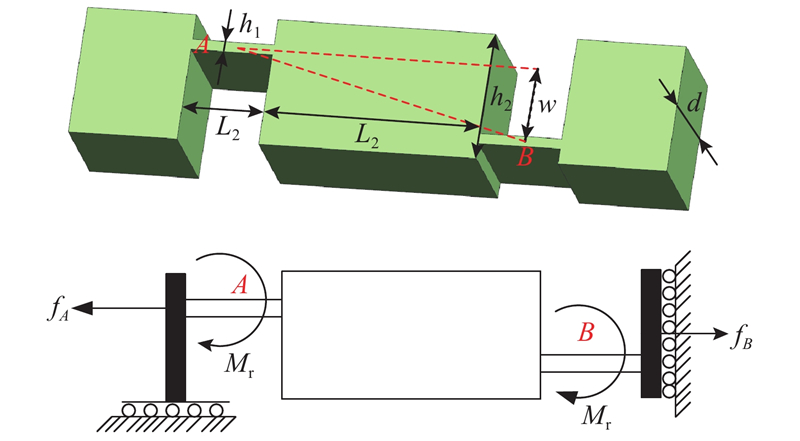
Abstract A new 2-DOF micro-positioning clamping system with large range was proposed in order to realize the precise positioning and increase the reachable positioning space of the micro-gripper in the micro-operating system. Firstly, a 2-DOF micro-positioning platform was designed based on the 2 translation and 1 rotation (2T1R) type compliant motion pair, and the structure of micro-positioning clamping system was designed by combining it with a micro-gripper. Secondly, the theoretical models of force-displacement relationship, lost motion and natural frequency of micro-positioning platform were deduced by the simplified linear elastic beam model, and the theoretical models of force-displacement relationship, displacement amplification ratio and natural frequency of micro-gripper were deduced by the Euler-Bernoulli beam model and the law of conservation of energy. Then, the parameters of the micro-positioning clamping system were optimized for the improvements of its static and dynamic performance. Finally, the correctness of the theoretical model was verified by finite element simulation, and the reachable positioning space of the micro-gripper was given. Results show that the design of micro-positioning clamping system is effective and feasible.
|
|
Received: 20 July 2020
Published: 05 July 2021
|
|
|
| Fund: 高等学校学科创新引智计划资助项目(B18027);江苏省“六大人才高峰”计划资助项目(ZBZZ-012);江苏省高校优秀科技创新团队基金资助项目(2019SJK07);江苏省研究生科研与实践创新计划资助项目(JSCX20_0760);江南大学研究生科研与实践创新计划资助项目(JNSJ19_005) |
|
Corresponding Authors:
Kun WANG
E-mail: 2729423602@qq.com;wangkun0808@126.com
|
大行程两自由度微定位夹持系统的设计与优化
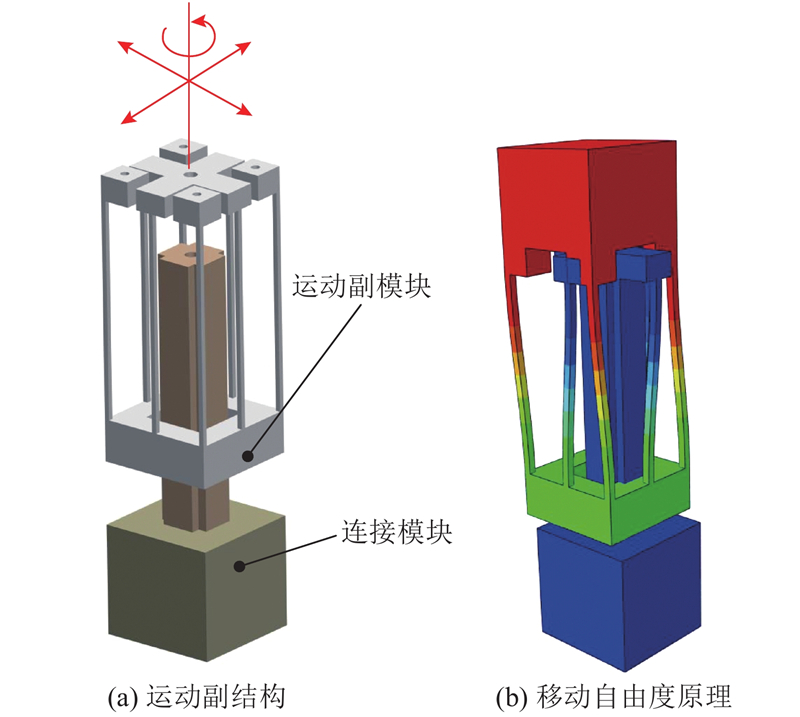
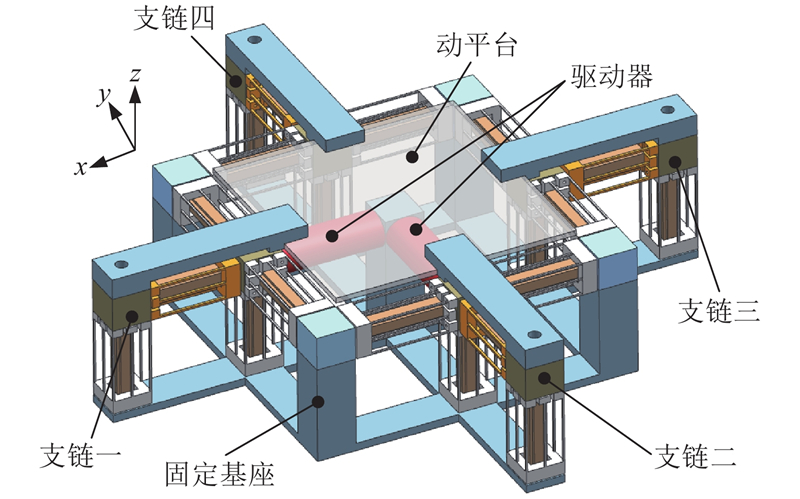
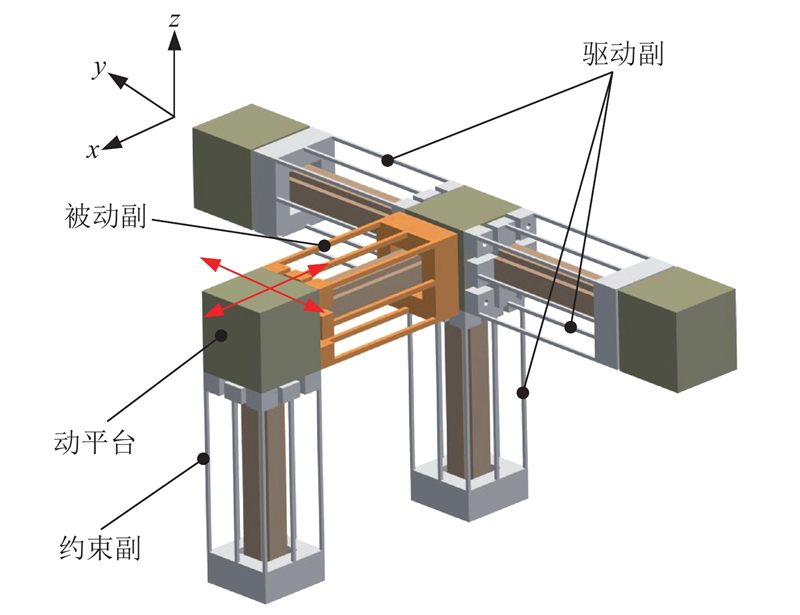
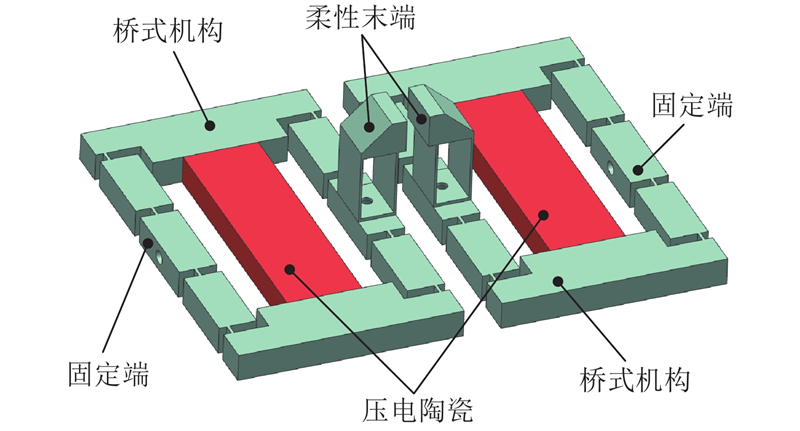
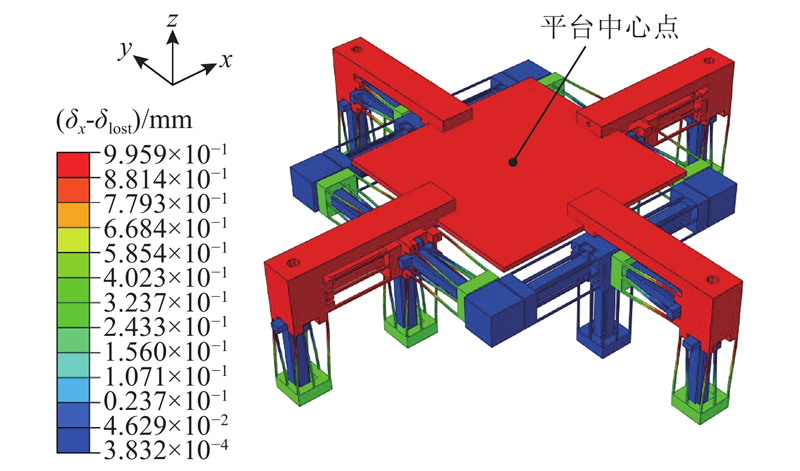
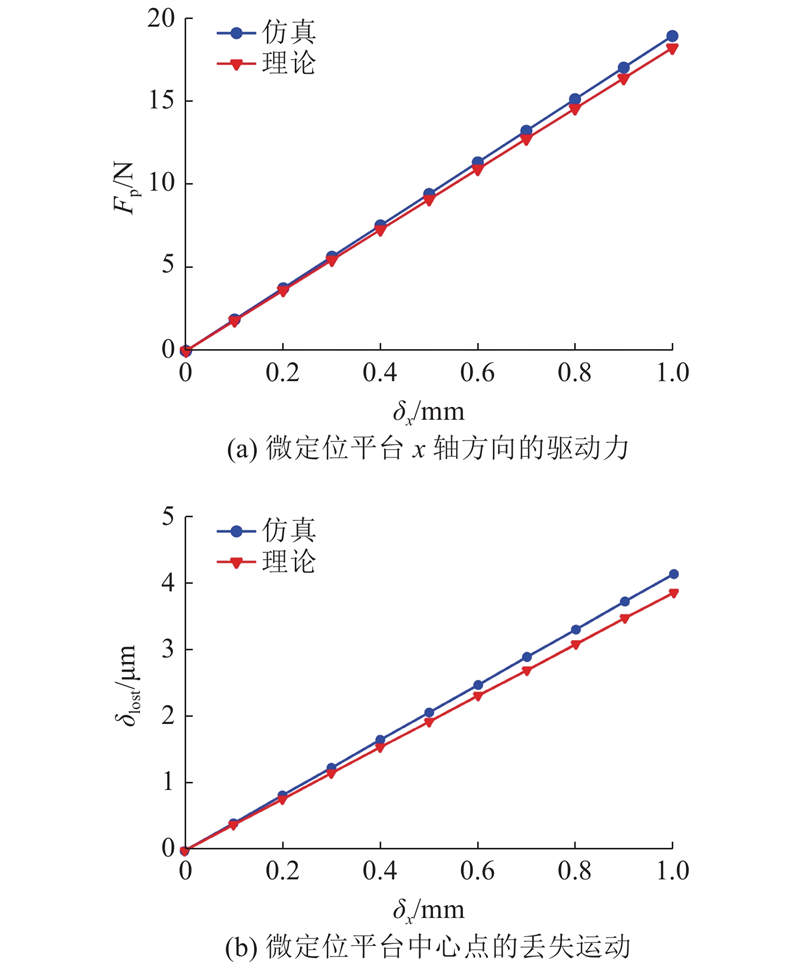
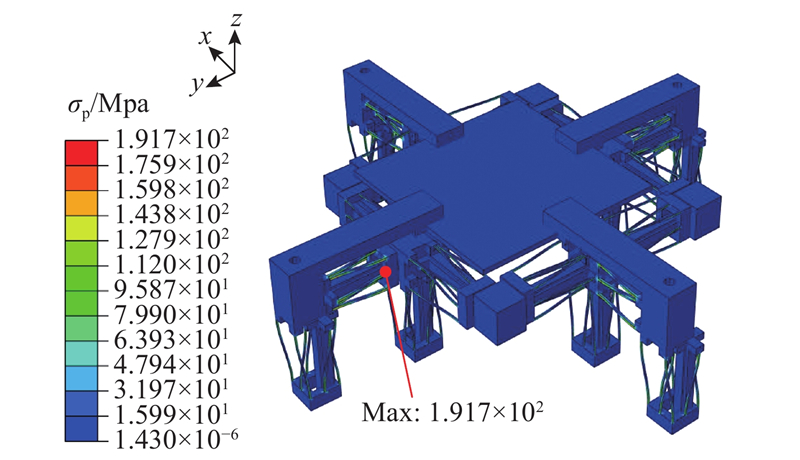
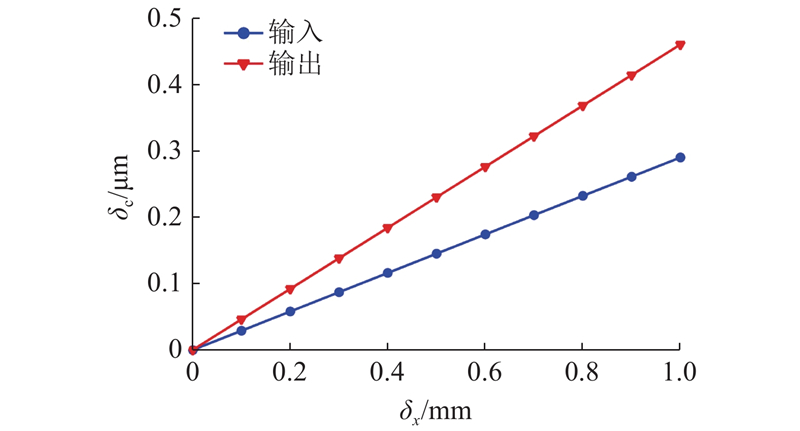
为了实现微操作系统中微夹持器的精密定位,增加其可达定位空间,提出大行程两自由度微定位夹持系统. 基于2移1转(2T1R)型柔性运动副,设计两自由度微定位平台,并将其与微夹持器相结合,设计微定位夹持系统的结构;采用简化的线弹性梁模型建立微定位平台力?位移关系、丢失运动和固有频率的理论模型,并采用欧拉?伯努利梁模型与能量守恒定律建立微夹持器力?位移关系、位移放大倍率和固有频率的理论模型;以提高微定位夹持系统的静、动态性能为目标进行参数优化;通过有限元仿真验证理论模型的正确性,并给出微夹持器的可达定位空间. 结果表明,微定位夹持系统设计具备有效性与可行性.
关键词:
微操作系统,
柔顺机构,
定位空间,
参数优化,
有限元仿真
|
|
| [1] |
林超, 陶友淘, 程凯, 等 微/纳传动平台的位移耦合分析[J]. 浙江大学学报: 工学版, 2013, 47 (4): 720- 727
LIN Chao, TAO You-tao, CHENG Kai, et al Displacement coupling analysis of micro/nano transmission platform[J]. Journal of Zhejiang University: Engineering Science, 2013, 47 (4): 720- 727
doi: 10.3785/j.issn.1008-973X.2013.04.024
|
|
|
| [2] |
马立, 荣伟彬, 孙立宁, 等 面向光学精密装配的微操作机器人[J]. 机械工程学报, 2009, 45 (2): 280- 247
MA Li, Rong Wei-bin, SUN Lin-ing, et al Micro operation robot for optical precise assembly[J]. Journal of Mechanical Engineering, 2009, 45 (2): 280- 247
doi: 10.3901/JME.2009.02.280
|
|
|
| [3] |
ÖZKALE B, PARREIRA R, BEKDEMIR A, et al Modular soft robotic microdevices for dexterous biomanipulation[J]. Lab on a Chip, 2019, 19 (5): 778- 788
doi: 10.1039/C8LC01200H
|
|
|
| [4] |
吴高华, 杨依领, 李国平, 等 具有高位移增幅特性的柔顺并联式x-y-θ微动平台 [J]. 机器人, 2020, 42 (1): 1- 9
WU Gao-hua, YANG Yi-ling, LI Guo-ping, et al A parallel compliant x-y-θ micro-stage with the characteristic of high displacement magnification [J]. Robot, 2020, 42 (1): 1- 9
|
|
|
| [5] |
ZHANG J B, LU K K, CHEN W H, et al Monolithically integrated two-axis microgripper for polarization maintaining in optical fiber assembly[J]. Review of Scientific Instruments, 2015, 86 (2): 025105
doi: 10.1063/1.4907551
|
|
|
| [6] |
于靖军, 郝广波, 陈贵敏, 等 柔性机构及其应用研究进展[J]. 机械工程学报, 2015, 51 (13): 53- 68
YU Jing-jun, HAO Guang-bo, CHEN Gui-min, et al State-of-art of compliant mechanisms and their applications[J]. Journal of Mechanical Engineering, 2015, 51 (13): 53- 68
doi: 10.3901/JME.2015.13.053
|
|
|
| [7] |
林超, 李坪洋, 沈忠磊, 等 压电驱动微夹持器特性分析[J]. 仪器仪表学报, 2019, 40 (7): 224- 232
Lin Chao, Li Ping-yang, Shen Zhong-lei, et al Characteristic analysis of the microgripper driven by piezoelectric actuators[J]. Chinese Journal of Scientific Instrument, 2019, 40 (7): 224- 232
|
|
|
| [8] |
HAO G B, HAND R B Design and static testing of a compact distributed-compliance gripper based on flexure motion[J]. Archives of Civil and Mechanical Engineering, 2016, 16 (4): 708- 716
doi: 10.1016/j.acme.2016.04.011
|
|
|
| [9] |
MASOOD M U, SALEEM M M, KHAN U S, et al Design, closed-form modeling and analysis of SU-8 based electrothermal microgripper for biomedical applications[J]. Microsystem Technologies, 2019, 25 (4): 1171- 1184
doi: 10.1007/s00542-018-4059-z
|
|
|
| [10] |
YANG S, XU Q Design and analysis of a decoupled XY MEMS microgripper with integrated dual-axis actuation and force sensing[J]. IFAC-Papers Online, 2017, 50 (1): 808- 813
doi: 10.1016/j.ifacol.2017.08.144
|
|
|
| [11] |
OWUSU-DANQUAH J S, SALEEB A F, NATSHEH S H Performance of a two-way shape memory microgripper actuator[J]. Journal of Aerospace Engineering, 2018, 31 (4): 04018040
doi: 10.1061/(ASCE)AS.1943-5525.0000857
|
|
|
| [12] |
HAO G B, ZHU J X Design of a monolithic double-slider based compliant gripper with large displacement and anti-buckling ability[J]. Micromachines, 2019, 10 (10): 1277- 1296
|
|
|
| [13] |
CHEN X D, HU S Y, DENG Z L, et al Design of large-displacement asymmetric piezoelectric microgripper based on flexible mechanisms[J]. Nanotechnology and Precision Engineering, 2019, 2 (4): 188- 193
doi: 10.1016/j.npe.2019.11.001
|
|
|
| [14] |
吴志刚, 陈敏 压电精密驱动柔性微夹钳设计[J]. 光学精密工程, 2020, 28 (2): 398- 404
WU Zhi-gan, CHEN Min Design of flexure micro-gripper precision-driven by piezoceramics[J]. Optics and Precision Engineering, 2020, 28 (2): 398- 404
|
|
|
| [15] |
林盛隆, 张宪民, 朱本亮 高带宽两自由度并联柔顺精密定位平台的优化设计与实验[J]. 光学精密工程, 2019, 27 (8): 1774- 1782
LIN Sheng-long, ZHANG Xian-min, ZHU Ben-liang, et al Optimal design and experiment of a high-bandwidth two-degree-of-freedom parallel nanopositioning stage[J]. Optics and Precision Engineering, 2019, 27 (8): 1774- 1782
doi: 10.3788/OPE.20192708.1774
|
|
|
| [16] |
AWTAR S, PARMAR G Design of a large range XY nanopositioning system[J]. Journal of Mechanisms and Robotics, 2013, 5 (2): 021008
doi: 10.1115/1.4023874
|
|
|
| [17] |
田延岭, 包亚洲, 王福军, 等 音圈电机驱动的柔性定位平台设计与控制[J]. 天津大学学报: 自然科学与工程技术版, 2017, 50 (10): 1070- 1076
TIAN Yan-ling, BAO Ya-zhou WANG Fu-jun, et al Design and control of a flexible positioning stage driven by voice coil motors[J]. Journal of Tianjin University: Science and Technology, 2017, 50 (10): 1070- 1076
|
|
|
| [18] |
HOPKINS J B, CULPEPPER M L Synthesis of multi-degree of freedom, parallel flexure system concepts via freedom and constraint topology (FACT) part I: principles[J]. Precision Engineering, 2010, 34 (2): 259- 270
doi: 10.1016/j.precisioneng.2009.06.008
|
|
|
| [19] |
HOPKINS J B, CULPEPPER M L Synthesis of multi-degree of freedom, parallel flexure system concepts via freedom and constraint topology (FACT) part II: practice[J]. Precision Engineering, 2010, 34 (2): 271- 278
doi: 10.1016/j.precisioneng.2009.06.007
|
|
|
| [20] |
曹毅, 王保兴, 刘俊辰, 等. 高精度大行程大有效台面空间平动精密定位平台: CN110211627A[P]. 2019-09-06.
|
|
|
| [21] |
王保兴, 孟刚, 林苗, 等 3-PPP型柔性并联微定位平台的设计与分析[J]. 北京航空航天大学学报, 2020, 46 (4): 798- 807
WANG Bao-xing, MENG Gang, LIN Miao, et al Design and analysis of a 3-PPP compliant parallel micro-positioning stage[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46 (4): 798- 807
|
|
|
| [22] |
杨志军, 白有盾, 陈新, 等 基于应力刚化效应的动态特性可调微动平台设计新方法[J]. 机械工程学报, 2015, 51 (23): 153- 159
YANG Zhi-jun, BAI You-dun, CHEN Xin, et al A new design method of dynamic characteristics adjustable micro motion stage based on tension stiffening[J]. Journal of Mechanical Engineering, 2015, 51 (23): 153- 159
doi: 10.3901/JME.2015.23.153
|
|
|
| [23] |
YU J J, LI S Z, SU H J, et al Screw theory based methodology for the deterministic type synthesis of flexure mechanisms[J]. Journal of Mechanisms and Robotics, 2013, 3 (3): 1194- 1204
|
|
|
| [24] |
LI Y M, WU Z G Design, analysis and simulation of a novel 3-DOF translational micromanipulator based on the PRB model[J]. Mechanism and Machine Theory, 2016, 100 (2): 235- 258
|
|
|
| [25] |
HERPE X, WALKER R, DUNNIGAN M, et al On a simplified nonlinear analytical model for the characterisation and design optimisation of a compliant XY micro-motion stage[J]. Robotics and Computer-Integrated Manufacturing, 2018, 49: 66- 76
doi: 10.1016/j.rcim.2017.05.012
|
|
|
| [26] |
HOWELL L L. Compliant Mechanisms [M]. New York: John Wiley and Sons, 2001: 302.
|
|
|
| [27] |
KIM J H, KIM S H, KWAK Y K Development of a piezoelectric actuator using a three-dimensional bridge-type hinge mechanism[J]. Review of Scientific Instruments, 2003, 74 (5): 2918- 2924
doi: 10.1063/1.1569411
|
|
|
| [28] |
XU Q S, LI Y M Analytical modeling, optimization and testing of a compound bridge-type compliant displacement amplifier[J]. Mechanism and Machine Theory, 2016, 46 (2): 183- 200
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|