| Computer Technology and Image Processing |
|


|
|
|
| Machining precision online measurement of large span pin hole using structured light |
Ying LI( ),Fang CHENG*(),Zhi-lin ZHAO ),Fang CHENG*(),Zhi-lin ZHAO |
| College of Biosystems Engineering and Food Science, Zhejiang University, Hangzhou 310058, China |
|
|
|
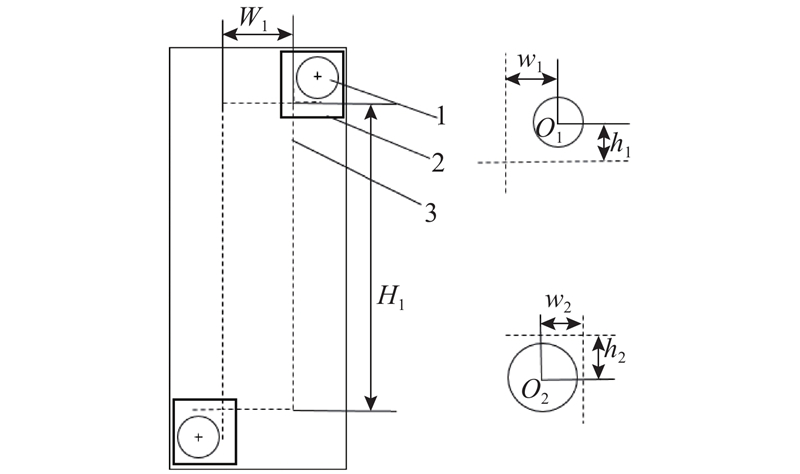
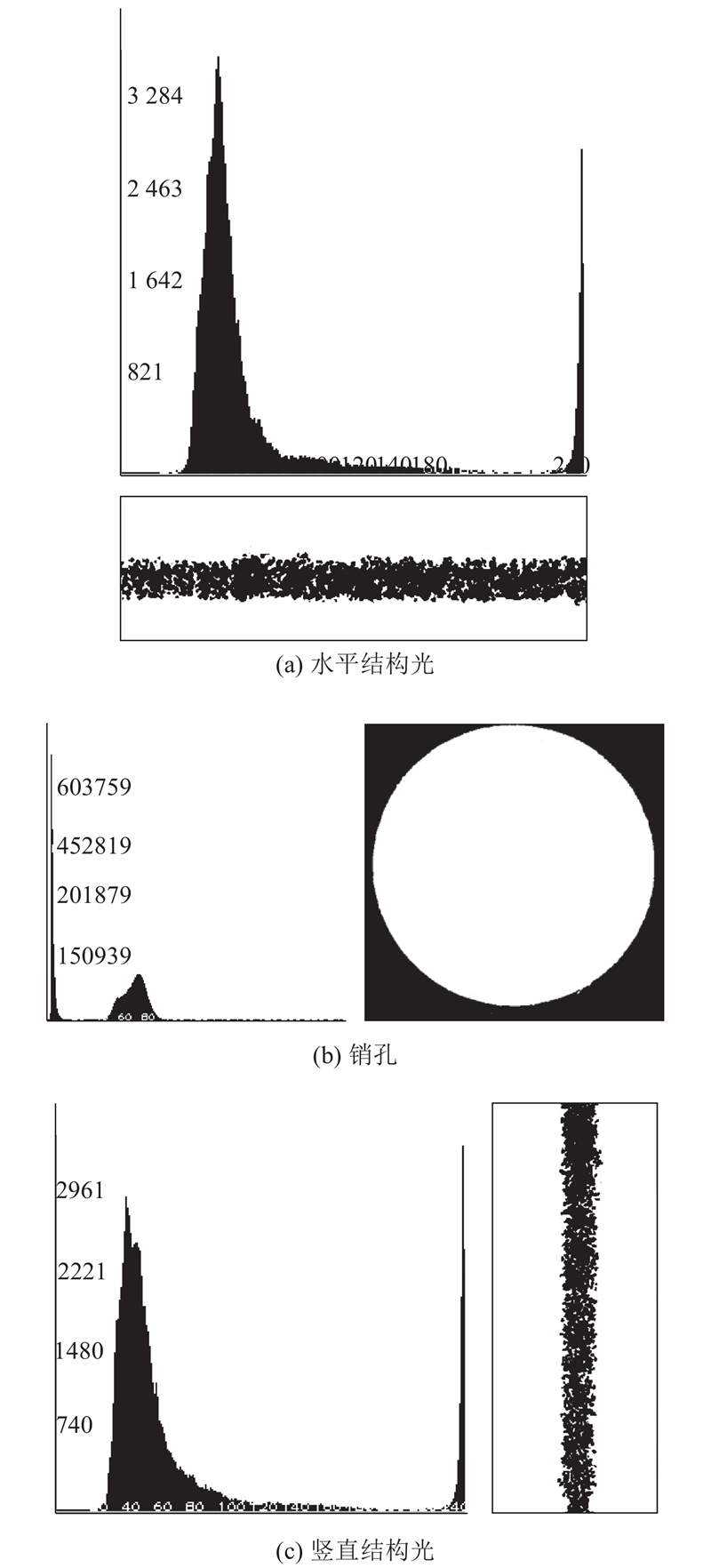
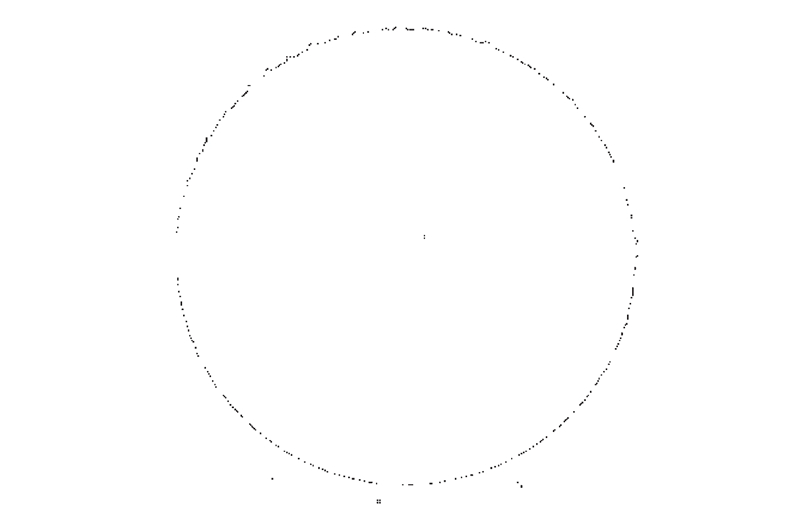
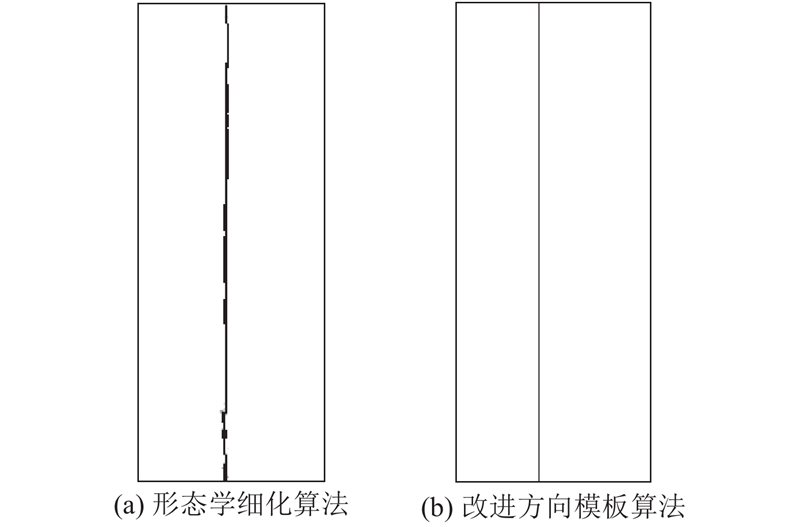
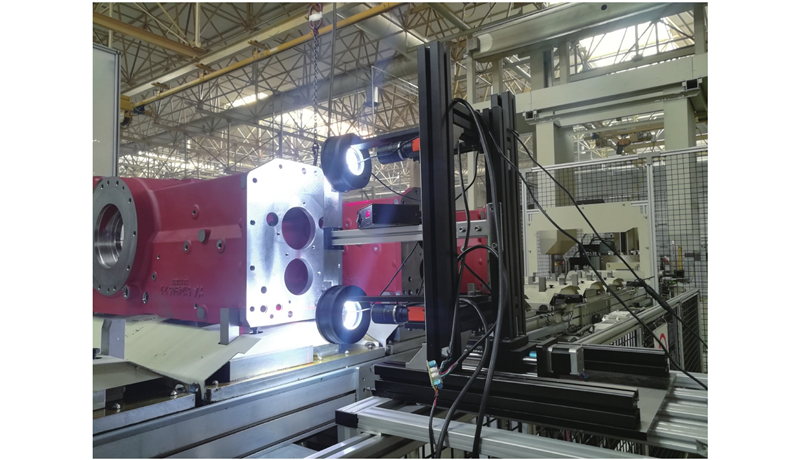
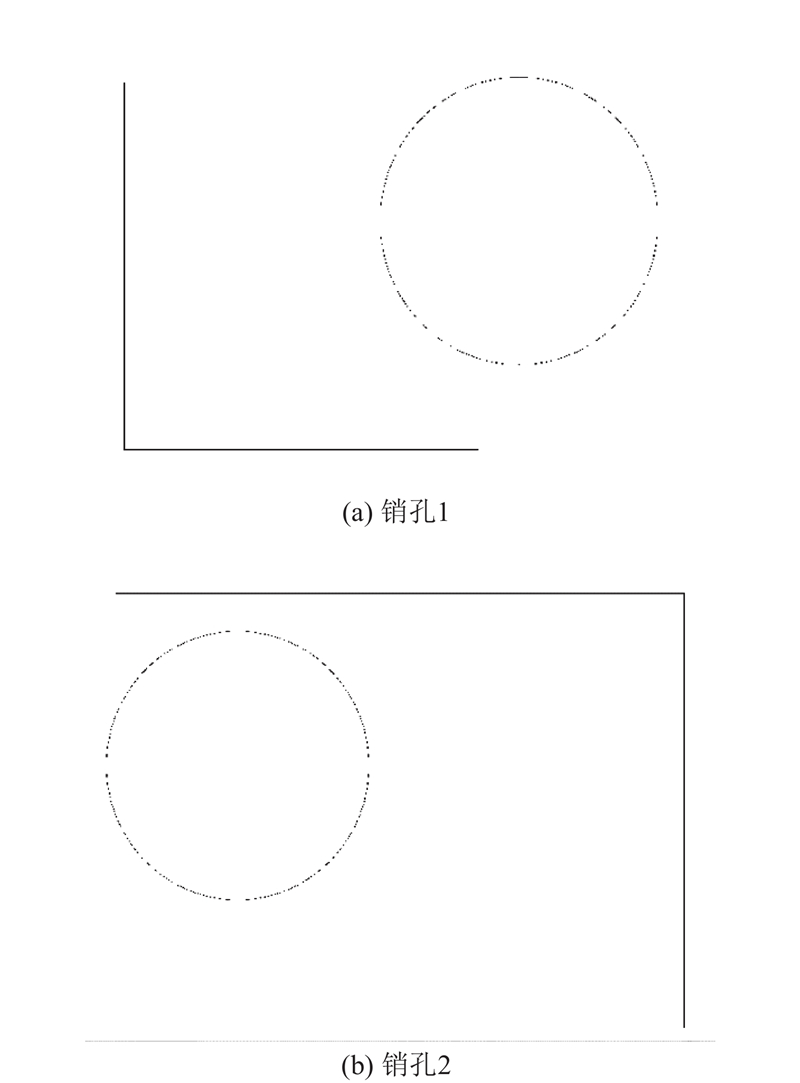
Abstract A two-cameras vision measurement system was designed using cross-hair structured light; an image acquisition device was constructed, which consisted of two high-precision industrial cameras, two cross lasers, and a ring light source. The image of the end pinhole at the transmission box processing site was obtained; the image region of interest (ROI) was extracted; bilateral filtering was used for noise reduction preprocessing, binarization and edge detection. The center lines of two cross structured light were extracted based on improved direction template method. According to the design principle of the measuring system, the diameter and position degree of two pin holes were measured, respectively. Results show that, for diameter of pin hole, the average deviation of the measurement results between the machine vision online measureement device and the electronic plug gauge is 0.001 mm; for hole set position degree, the maximum deviation of the measurement results between the machine vision online measuring device and the coordinate measuring device is 0.02 mm. The proposed machine vision online measuring device can meet the requirements of processing accuracy and online real-time measurement.
|
|
Received: 22 January 2019
Published: 05 March 2020
|
|
|
|
Corresponding Authors:
Fang CHENG
E-mail: 21613053@zju.edu.cn;fcheng@zju.edu.cn
|
采用结构光的大跨度销孔加工精度在线测量
设计采用十字线结构光的双相机视觉测量系统,构建由2个高精度工业相机、2个十字激光器和环形光源等组成的图像采集装置. 在传动箱加工现场获取端面销孔图像,提取图像感兴趣区域(ROI),采用双边滤波进行降噪预处理、二值化和边缘检测;基于改进方向模板法提取2个十字线结构光的中心线. 依据测量系统的设计原理分别测出2个销孔的孔径及其位置度. 结果表明:对于孔径,机器视觉在线测量装置与电子塞规的测量结果的偏差平均值为0.001 mm;对于孔组位置度,机器视觉在线测量装置与三坐标测量仪的测量结果的最大偏差为0.02 mm. 这表明机器视觉在线测量装置能满足加工精度要求和在线实时测量需求.
关键词:
改进方向模板法,
结构光,
大跨度,
加工精度,
在线测量,
机器视觉,
图像处理
|
|
| [1] |
张明海 三坐标测量机在拖拉机制造业的应用[J]. 南方农机, 2017, 48 (24): 64- 68
ZHANG Ming-hai Application of coordinate measuring machine in tractor manufacturing industry[J]. South Agricultural Machinery, 2017, 48 (24): 64- 68
doi: 10.3969/j.issn.1672-3872.2017.24.050
|
|
|
| [2] |
冯乾新, 梁瑞丽 孔组位置度量规的设计[J]. 工具技术, 2015, 49 (1): 87- 90
FENG Qian-xin, LIANG Rui-li Design of hole set position gauge[J]. Tool Engineering, 2015, 49 (1): 87- 90
doi: 10.3969/j.issn.1000-7008.2015.01.024
|
|
|
| [3] |
张亚伟, 王冬, 陈度, 等 大型收获机械发动机孔组位置度误差在线检测方法[J]. 农业机械学报, 2017, 48 (Suppl. 1): 71- 78
ZHANG Ya-wei, WANG Dong, CHEN Du online method for large-scale harvester engine punch combination position accuracy measurement[J]. Journal of Agricultural Machinery, 2017, 48 (Suppl. 1): 71- 78
|
|
|
| [4] |
杨永奎. 基于机器视觉的液力变矩器焊缝三维检测技术研究_杨永奎[D]. 西安: 长安大学, 2017.
YANG Yong-kui. Research on three-dimensional inspection technology of weld of hydraulic torque converter based on machine vision[D]. Xi'an: Chang'an University, 2017.
|
|
|
| [5] |
LI Y, LI Y F, WANG Q L, et al Measurement and defect detection of the weld bead based on online vision inspection[J]. IEEE Transactions on Instru- mentation and Measurement, 2010, 59 (7): 1841- 1849
doi: 10.1109/TIM.2009.2028222
|
|
|
| [6] |
陈炳权, 刘宏立, 孟凡斌 数字图像处理技术的现状及其发展方向[J]. 吉首大学学报: 自然科学版, 2009, 30 (1): 63- 70
CHEN Bing-quan, LIU Hong-li, MENG Fan-bin Digital image processing technology and its develop- ment direction[J]. Journal of Jishou University: Natural Science Edition, 2009, 30 (1): 63- 70
|
|
|
| [7] |
GADELMAWLA E S Computer vision algorithms for measurement and inspection of external screw threads[J]. Measurement, 2017, 100 (3): 36- 49
|
|
|
| [8] |
YANG S R, LIU M, YIN S B, et al. An improved method for location of concentric circles in vision measurement [J]. Measurement, 2017, 100(3): 243-251.
|
|
|
| [9] |
孙博文, 朱志明, 郭吉昌, 等 基于激光结构光的视觉传感器的图像处理技术研究应用及展望[J]. 焊接, 2018, 543 (9): 10- 14
SUN Bo-wen, ZHU Zhi-ming, GUO Ji-chang Application and prospect of image processing techno-logy for vision sensor based on laser structured light[J]. Welding and Joining, 2018, 543 (9): 10- 14
|
|
|
| [10] |
王滔. 基于结构光的焊缝跟踪伺服系统设计与研究[D]. 杭州: 浙江大学, 2017.
WANG Tao. Design and research of weld seam tracking servo system based on structure light [D]. Hangzhou: Zhejiang University, 2017.
|
|
|
| [11] |
汪小涵, 赵杰 基于线结构光视觉技术的工件尺寸三维测量系统研究[J]. 中国管理信息化, 2017, 20 (23): 178- 182
WANG Xiao-han, ZHAO Jie Reseach on 3D measuring system of workpiece dimension based on linear structured light vision technology[J]. China Management Informationization, 2017, 20 (23): 178- 182
|
|
|
| [12] |
SUN Q C, CHEN J, LI C J A robust method to extract a laser stripe centre based on grey level moment[J]. Optics and Lasers in Engineering, 2015, 67: 122- 127
doi: 10.1016/j.optlaseng.2014.11.007
|
|
|
| [13] |
MAO Q Z, CUI H, HU Q W, et al A rigorous fastener inspection approach for high-speed railway from structured light sensors[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2018, 143: 249- 267
doi: 10.1016/j.isprsjprs.2017.11.007
|
|
|
| [14] |
田庆国, 葛宝臻, 李云鹏, 等 利用轮廓线多边形表示实时提取光带中心线[J]. 光学精密工程, 2012, 20 (6): 1357- 1364
TIAN Qing-guo, GE Bao-zhen, LI Yun-peng Real-time extraction of light stripe central line based on contour polygonal representation[J]. Optics and Precision Engineering, 2012, 20 (6): 1357- 1364
|
|
|
| [15] |
南方, 李大华, 高强, 等 改进Steger算法的自适应光条纹中心提取[J]. 激光杂志, 2018, 39 (1): 85- 88
NAN Fang, LI Da-hua, GAO Qiang Implementation of adaptive light stripe center extraction of improved Steger algorithm[J]. Laster Journal, 2018, 39 (1): 85- 88
|
|
|
| [16] |
王泽浩, 张中炜 自适应方向模板线结构光条纹中心提取方法[J]. 激光杂志, 2017, 38 (1): 60- 64
WANG Ze-hao, ZHANG Zhong-wei Adaptive direction template method to extract the center of structured light[J]. Laser Journal, 2017, 38 (1): 60- 64
|
|
|
| [17] |
胡改玲, 周翔, 杨涛, 等 光刀自适应灰度加权亚像素中心精确提取[J]. 西安交通大学学报, 2018, 52 (5): 21- 28
HU Gai-ling, ZHOU Xiang, YANG Tao Sub-pixel centerline extraction based on light stripe adaptive grayscale weighting[J]. Journal of Xi'an Jiaotong University, 2018, 52 (5): 21- 28
|
|
|
| [18] |
CUI Z Y, ZHANG H A study on contour extraction method in computer vision measurement technology[J]. Computer Modelline and New Technologies, 2013, 17 (5B): 88- 91
|
|
|
| [19] |
MOONS T, VAN GOOL L, PROESMANS M, et al Affine reconstruction from perspective image pairs with a relative object-camera translation in between[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1996, 18 (1): 77- 83
doi: 10.1109/34.476015
|
|
|
| [20] |
徐蕾, 彭月平, 贺科宁 基于改进双边滤波与随机共振的图像去噪算法研究[J]. 激光杂志, 2018, 39 (8): 142- 148
XU Lei, PENG Yue-ping, HE Ke-ning Resarch on image denoising algorithm based on improved bilateral filtering and stochastic resonance[J]. Laser Journal, 2018, 39 (8): 142- 148
|
|
|
| [21] |
TIAN Q G, ZHANG X Y, MA Q, et al Utilizing polygon segmentation technique to extract and optimize light stripe centerline in line-structured laser 3D scanner[J]. Pattern Recognition, 2016, 55: 100- 113
doi: 10.1016/j.patcog.2016.02.008
|
|
|
| [22] |
WANG Y Z, GENG B L, LONG Chao Contour extraction of a laser stripe located on a microscope image from a stereo light microscope[J]. Microscopy Research and Technique, 2019, 82 (3): 260- 271
doi: 10.1002/jemt.v82.3
|
|
|
| [23] |
段瑞玲, 李庆祥, 李玉和 图像边缘检测方法研究综述[J]. 光学技术, 2005, 31 (3): 95- 99
DUAN Rui-ling, LI Qing-xiang, LI Yu-he Summary of image edge detection[J]. Optical Techinque, 2005, 31 (3): 95- 99
|
|
|
| [24] |
赵军 焊缝结构光图像处理与特征提取方法[J]. 西安交通大学学报, 2013, 47 (1): 114- 119
ZHAO Jun Image processing and feature extraction for structured light images of welded seam[J]. Journal of Xi'an Jiaotong University, 2013, 47 (1): 114- 119
doi: 10.3969/j.issn.1008-245X.2013.01.017
|
|
|
| [25] |
何雯. 精确提取光饱和与物体边缘线结构光条纹中心的方法研究[D]. 陕西: 西北农林科技大学, 2018.
HE Wen. Research on the extraction Accuracy of laser stripe center in light saturation and at the edge of the object [D]. Shanxi: Northwest A&F University, 2018.
|
|
|
| [26] |
BAO P, ZHANG L WU X L Canny edge detection enhancement by scale multiplication[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2005, 27 (9): 1481- 1485
|
|
|
| [27] |
刘枝梅, 邓文怡, 娄小平 结构光测量系统中光条中心的提取算法[J]. 北京机械工业学院学报, 2009, 24 (1): 42- 45
LIU Zhi-mei, DENG Wen-yi, LOU Xiao-ping Extraction algorithm of light stripes center in the measurement of structured light[J]. Journal of Beijing Institute of Machinery, 2009, 24 (1): 42- 45
doi: 10.3969/j.issn.1674-6864.2009.01.011
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|