| Mechanical and Energy Engineering |
|


|
|
|
| Research on robot constant force control of surface tracking based on reinforcement learning |
Tie ZHANG( ),Meng XIAO,Yan-biao ZOU,Jia-dong XIAO ),Meng XIAO,Yan-biao ZOU,Jia-dong XIAO |
| School of Mechanical and Automotive Engineering, South China University of Technology, Guangzhou 510640, China |
|
|
|
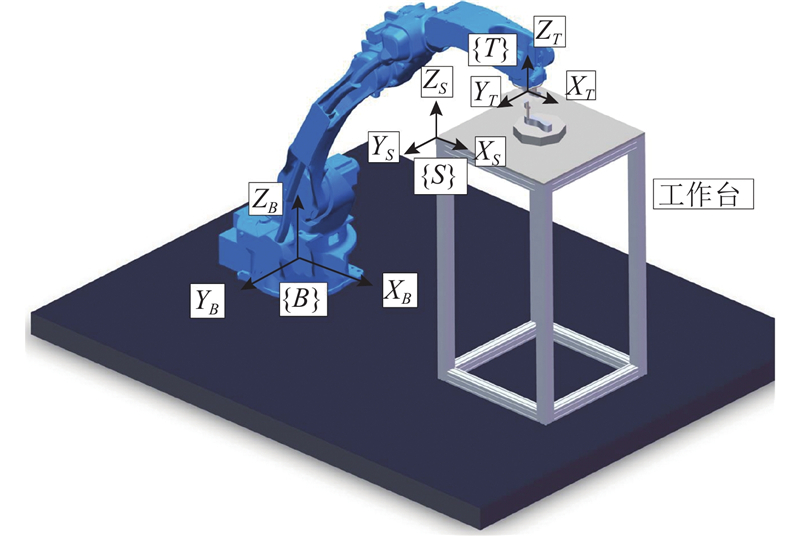
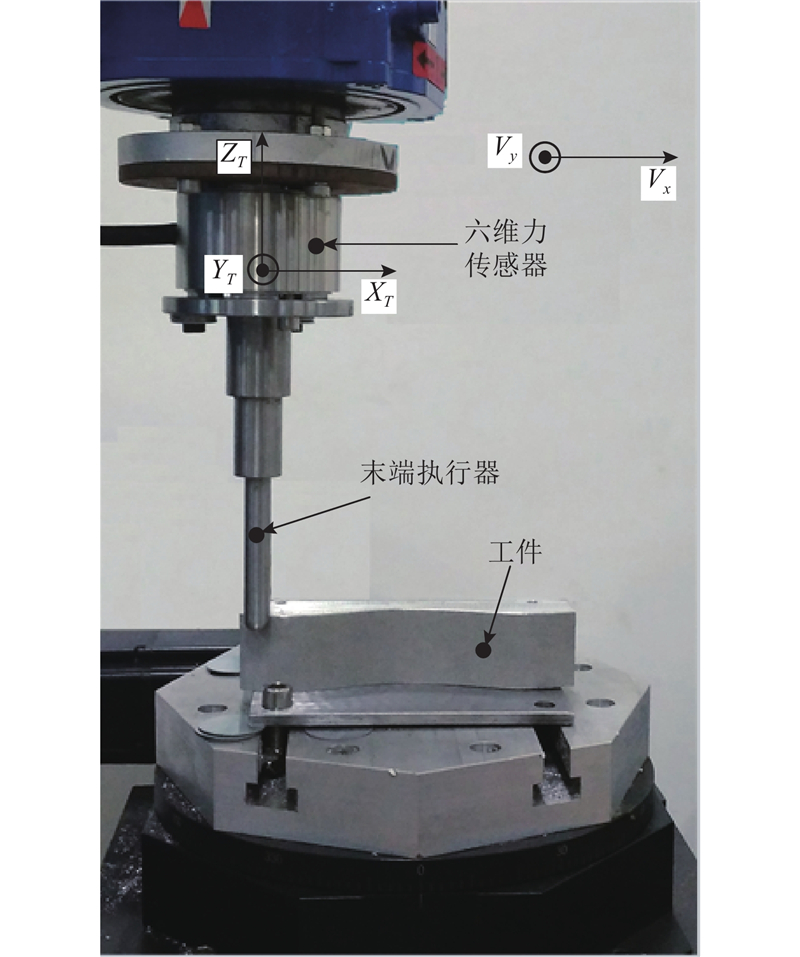
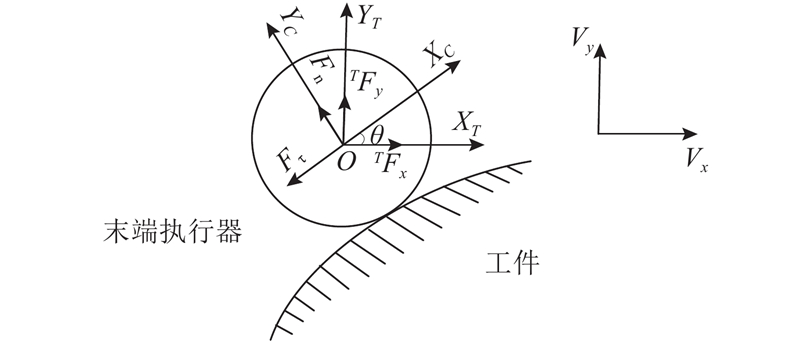
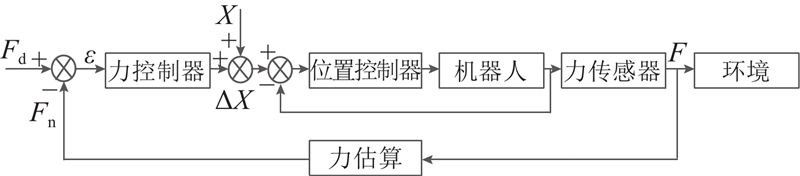
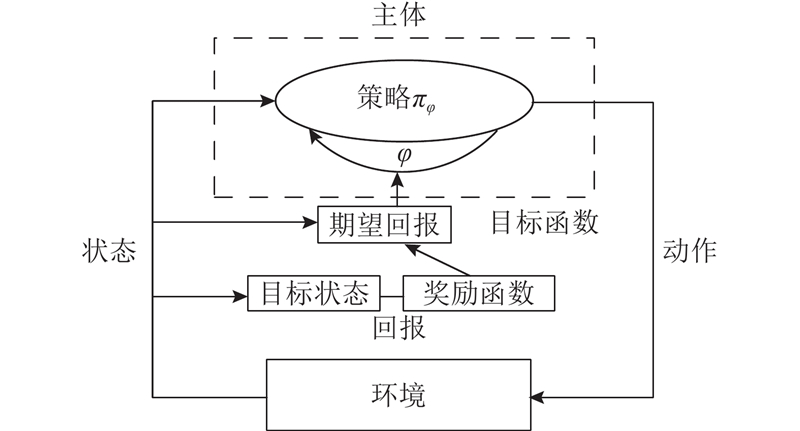
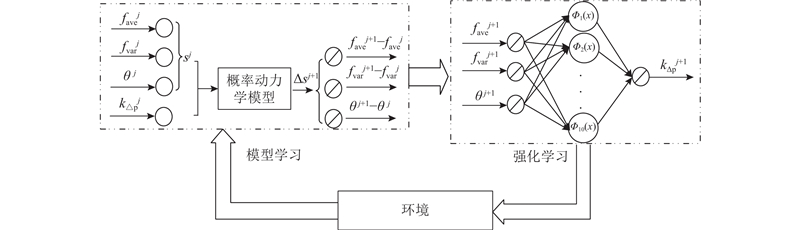
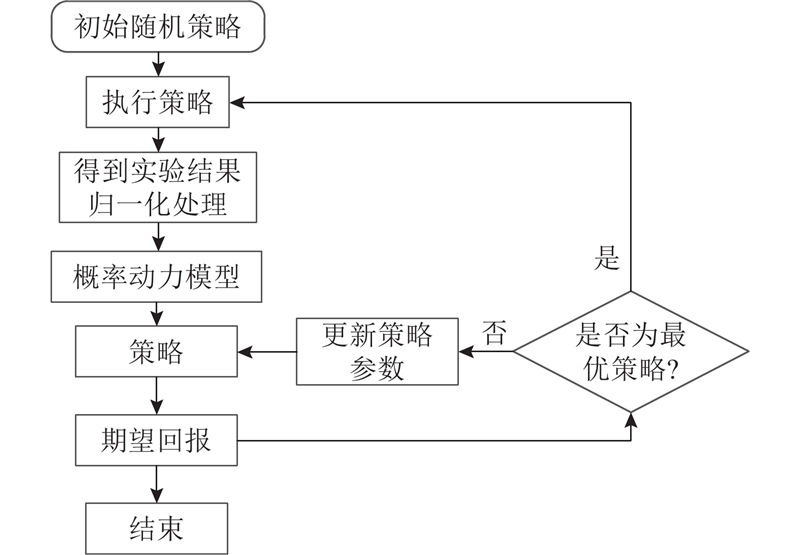
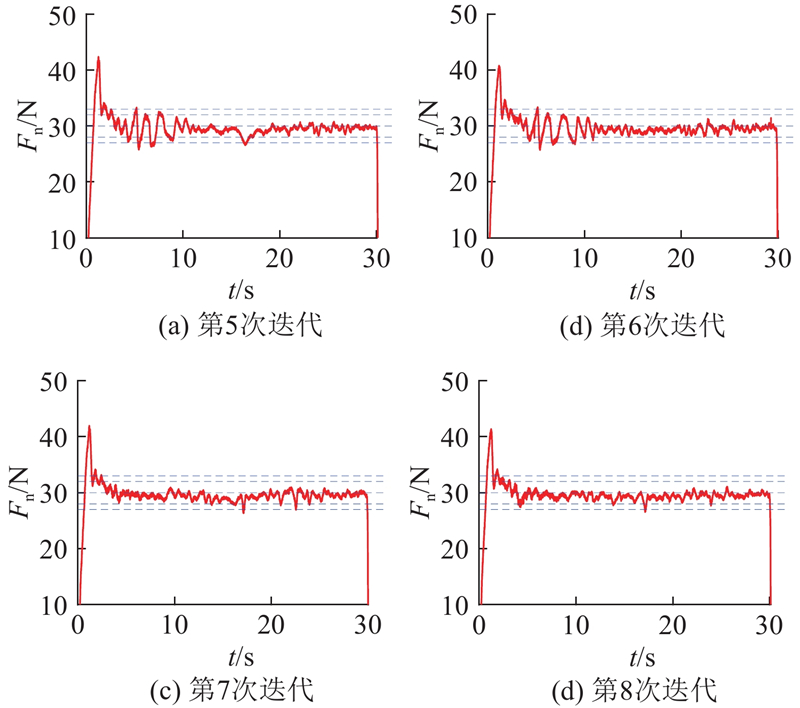
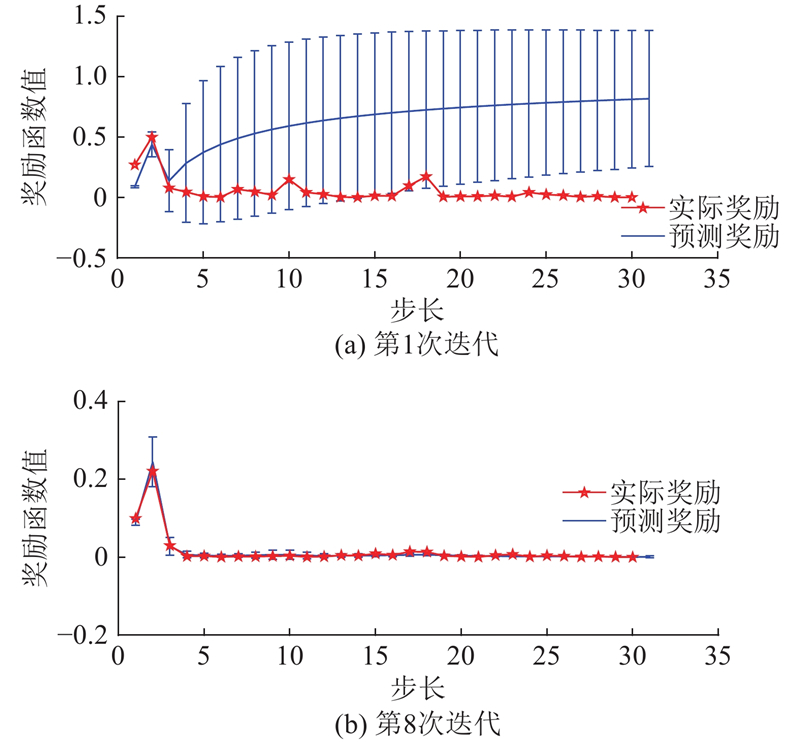
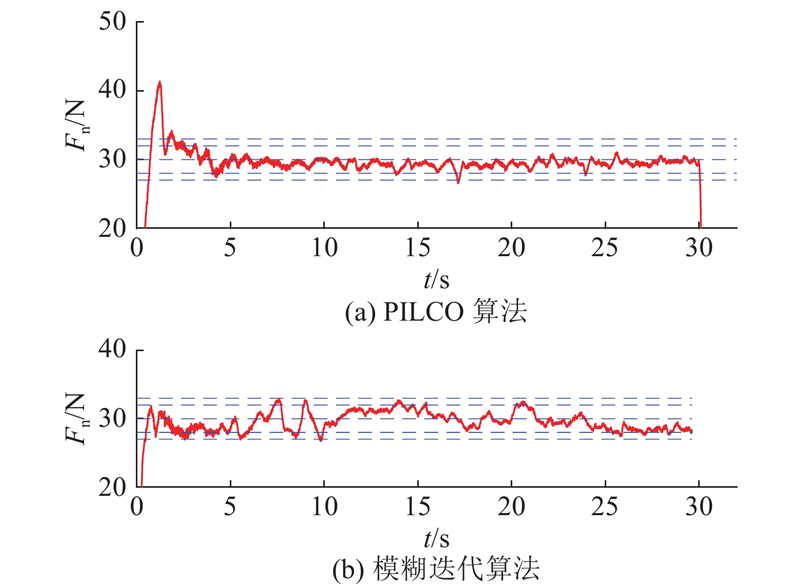
Abstract The contact model between robot end-effector and surface was established in order to solve the problem that it is difficult to obtain contact force when a robot end effector contacts with the curved workpiece. The relationship between the contact force coordinate system of the curved surface and the measuring coordinate system of the robot sensor was constructed. The relationship between the output parameters of the model and the contact state was analyzed based on probabilistic inference and learning for control (PILCO) which was a reinforcement learning algorithm based on a probabilistic dynamics model. The partial contact state was forecasted according to the output state, and the displacement input parameters of the robot were optimized to achieve a constant force by the reinforcement learning algorithm. The input state of the reinforcement learning was modified to an average state value over a period of time, which reduced the interference to the input state value during experiments. The experimental results showed that the algorithm obtained stable force after 8 iterations. The convergence speed was faster compared with the fuzzy iterative algorithm, and the average absolute value of the force error was reduced by 29%.
|
|
Received: 02 August 2018
Published: 30 September 2019
|
|
|
基于强化学习的机器人曲面恒力跟踪研究
针对机器人末端执行器和曲面工件接触时难以得到恒定接触力的问题,建立机器人末端执行器与曲面工件的接触模型.构建曲面接触力坐标系与机器人传感器测量坐标系之间的关系,利用基于概率动力学模型的强化学习(PILCO)算法对模型输出参数与接触状态的关系进行学习,对部分接触状态进行预测,强化学习根据预测的状态优化机器人位移输入参数,得到期望跟踪力信号. 实验中,将强化学习的输入状态改为一段时间内的状态平均值以减少接触状态下信号的干扰. 实验结果表明,利用PILCO算法在迭代8次后能够得到较稳定的力,相比于模糊迭代算法收敛速度较快,力误差绝对值的平均值减少了29%.
关键词:
机器人,
曲面跟踪,
力控制,
基于概率动力学模型的强化学习(PILCO),
强化学习
|
|
| [1] |
ALICI G, SHIRINZADEH B Enhanced stiffness modeling, identification and characterization for robot manipulators[J]. IEEE Transactions on Robotics, 2005, 21 (4): 554- 564
doi: 10.1109/TRO.2004.842347
|
|
|
| [2] |
黄奇伟, 章明, 曲巍崴, 等 机器人制孔姿态优化与光顺[J]. 浙江大学学报: 工学版, 2015, 49 (12): 2261- 2268
HUANG Qi-wei, ZHANG Ming, QU Wei-wei, et al Posture optimization and smoothness for robot drilling[J]. Journal of Zhejiang University: Engineering Science, 2015, 49 (12): 2261- 2268
|
|
|
| [3] |
WINKLER A, SUCHY J. Force controlled contour following on unknown objects with an industrial robot [C]//IEEE International Symposium on Robotic and Sensors Environments (ROSE). Washington, DC: IEEE, 2013: 208-213.
|
|
|
| [4] |
TUNG P, FAN S Application of fuzzy on-line self-adaptive controller for a contour tracking robot on unknown contours[J]. Fuzzy Sets and Systems, 1996, 82 (1): 17- 25
doi: 10.1016/0165-0114(95)00272-3
|
|
|
| [5] |
ABU-MALLOUH M, SURGENOR B. Force/velocity control of a pneumatic gantry robot for contour tracking with neural network compensation [C]// ASME 2008 International Manufacturing Science and Engineering Conference. Evanston, Illinois, USA: ASME, 2008: 11-18.
|
|
|
| [6] |
LI E C, LI Z M Surface tracking with robot force control in unknown environment[J]. Advanced Materials Research, 2011, 328-330: 2140- 2143
doi: 10.4028/www.scientific.net/AMR.328-330
|
|
|
| [7] |
YE B S, SONG B, LI Z Y, et al A study of force and position tracking control for robot contact with an arbitrarily inclined plane[J]. International Journal of Advanced Robotic Systems, 2013, 10 (1): 1- 1
doi: 10.5772/52938
|
|
|
| [8] |
DUAN J J, GAN Y H, CHEN M, et al Adaptive variable impedance control for dynamic contact force tracking in uncertain environment[J]. Robotics and Autonomous Systems, 2018, 102: 54- 65
doi: 10.1016/j.robot.2018.01.009
|
|
|
| [9] |
NUCHKRUA T, CHEN S L Precision contouring control of five degree of freedom robot manipulators with uncertainty[J]. International Journal of Advanced Robotic Systems, 2017, 14 (1): 208- 213
|
|
|
| [10] |
WANG W C, LEE C H. Fuzzy neural network-based adaptive impedance force control design of robot manipulator under unknown environment [C]//IEEE International Conference on Fuzzy Systems. Beijing: IEEE, 2014: 1442-1448.
|
|
|
| [11] |
KOBER J, BAGNELL J A, PETERS J Reinforcement learning in robotics: a survey[J]. The International Journal of Robotics Research, 2013, 32 (11): 1238- 1274
doi: 10.1177/0278364913495721
|
|
|
| [12] |
NG A Y. Shaping and policy search in reinforcement learning [D]. California: University of California, Berkeley, 2003.
|
|
|
| [13] |
MüLLING K, KOBER J, KROEMER O, et al Learning to select and generalize striking movements in robot table tennis[J]. The International Journal of Robotics Research, 2013, 32 (3): 263- 279
doi: 10.1177/0278364912472380
|
|
|
| [14] |
HESTER T, QUINLAN M, STONE P. Generalized model learning for Reinforcement Learning on a humanoid robot [C]// IEEE International Conference on Robotics and Automation. Anchorage: IEEE, 2010: 2369-2374.
|
|
|
| [15] |
YEN G G, HICKEY T W Reinforcement learning algorithms for robotic navigation in dynamic environments[J]. ISA Transactions, 2004, 43 (2): 217- 230
doi: 10.1016/S0019-0578(07)60032-9
|
|
|
| [16] |
ARULKUMARAN K, DEISENROTH M P, BRUNDAGE M, et al Deep reinforcement learning: a brief survey[J]. IEEE Signal Processing Magazine, 2017, 34 (6): 26- 38
doi: 10.1109/MSP.2017.2743240
|
|
|
| [17] |
POLYDOROS A S, NALPANTIDIS L Survey of model-based reinforcement learning: applications on robotics[J]. Journal of Intelligent and Robotic Systems, 2017, 86 (2): 1- 21
|
|
|
| [18] |
DOERR A, TUONG N D, MARCO A, et al. Model-based policy search for automatic tuning of multivariate PID controllers [C]//2017 IEEE International Conference on Robotics and Automation (ICRA). Singapore: IEEE, 2017: 5295-5301.
|
|
|
| [19] |
HAN H, GAUL P, MATSUBARA T. Model-based reinforcement learning approach for deformable linear object manipulation [C]//2017 13th IEEE Conference on Automation Science and Engineering (CASE). Xi'an: IEEE, 2017: 750-755.
|
|
|
| [20] |
ZENG G, HEMAMI A An overview of robot force control[J]. Robotica, 1997, 15 (5): 473- 482
doi: 10.1017/S026357479700057X
|
|
|
| [21] |
SHENG X, XU L, WANG Z A position-based explicit force control strategy based on online trajectory prediction[J]. International Journal of Robotics and Automation, 2017, 32 (1): 93- 100
|
|
|
| [22] |
VOLPE R, KHOSLA P A theoretical and experimental investigation of explicit force control strategies for manipulators[J]. IEEE Transactions on Automatic Control, 1993, 38 (11): 1634- 1650
doi: 10.1109/9.262033
|
|
|
| [23] |
KOMATI B, PAC M R, RANATUNGA I, et al. Explicit force control vs impedance control for micromanipulation [C]//ASME 2013 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. Portland: ASME, 2013: V001T09A018.
|
|
|
| [24] |
DEISENROTH M P, RASMUSSEN C E. PILCO: a model-based and data-efficient approach to policy search [C]// International Conference on International Conference on Machine Learning. Bellevue: Omnipress, 2011: 465-472.
|
|
|
| [25] |
DEISENROTH M P. Efficient reinforcement learning using Gaussian processes [M]. Karlsruhe, Germany: KIT, 2010.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|