Static and dynamic characteristic analysis and structure optimization for crossbeam structure of heavy-duty truss robot
Jin WANG1(),Xiang-kun WANG1,Jian-hui FU1,*(),Guo-dong LU1,Chao-chao JIN2,Yan-zhi CHEN3
1. State Key Laboratory of Fluid Power and Mechatronic Systems, Zhejiang University, Hangzhou 310027, China 2. Ningbo Welllih Robot Technology Limited Company, Ningbo 315480, China 3. Yuyao Zhejiang University Robot Research Center, Ningbo 315400, China
The finite element method was used to analyze the static and dynamic characteristics of the crossbeam structure of heavy-duty truss robot and optimize the structure in order to explore and improve the static and dynamic characteristics under extreme load pressure. The static analysis results showed that the maximum deformation of the crossbeam structure in the Y direction was 0.470 mm under the pressure of the limit load of 17800 N. The dynamic analysis results showed that the first six natural frequencies of the crossbeam structure were distributed from 47 to 134 Hz. Harmonic response analysis results showed the influence of the first three natural frequencies on the structure. The optimization results show that the experimental design method of OSF has better optimization effect under two different experimental design methods of CCD and OSF. The quality of the crossbeam structure was reduced by 1.47%, the total deformation was reduced by 18.41% and the frequency was reduced by 13.48% after the optimization of the OSF experimental design.
Jin WANG,Xiang-kun WANG,Jian-hui FU,Guo-dong LU,Chao-chao JIN,Yan-zhi CHEN. Static and dynamic characteristic analysis and structure optimization for crossbeam structure of heavy-duty truss robot. Journal of ZheJiang University (Engineering Science), 2021, 55(1): 124-134.
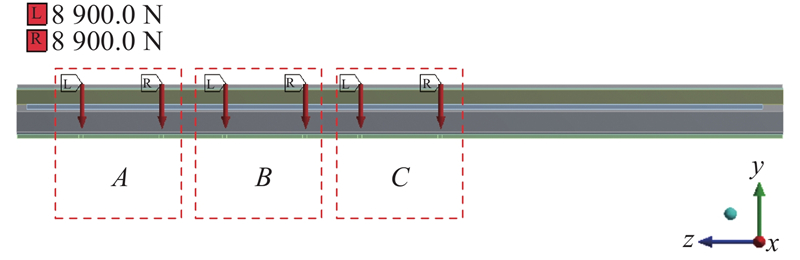
为了探究并改善重载桁架机器人横梁结构在承受极限负载压力下的静动态特性,利用有限元方法分析该结构的静动态特性并进行结构优化. 静态分析结果表明,横梁结构在承受极限负载17 800 N的压力下,横梁结构在Y方向上的最大变形量为0.470 mm. 动态分析结果表明,横梁结构的前6阶固有频率为47~134 Hz. 谐响应分析结果显示了前3阶固有频率对结构的影响. 优化结果表明,在中心复合设计(CCD)与最佳填充空间设计(OSF)2种不同实验设计方法下,OSF实验设计方法具有更好的优化效果. OSF实验设计优化后,横梁结构的质量降低了1.47%,总变形量降低了18.41%,频率降低了13.48%.
关键词:
重载桁架机器人,
横梁结构,
模态分析,
谐响应分析,
结构尺寸优化
Fig.1Heavy-duty robot model and crossbeam structure model
结构
S/mm
L/mm
T/mm
E/(1011 Pa)
ρ/(kg·m?3)
横梁
400×400
7300
12
2
7850
滑轨
46×35
7280
?
2
7850
齿条
39×35
7000
?
2
7850
Tab.1Basic parameter of crossbeam,slide rail and rack model
Fig.2Cross-section of crossbeam structure and meshing result
Fig.3Simplified model of pressure load
单元
DA /mm
σA /MPa
DB/mm
σB/MPa
DC/mm
σC /MPa
Nd
ta /s
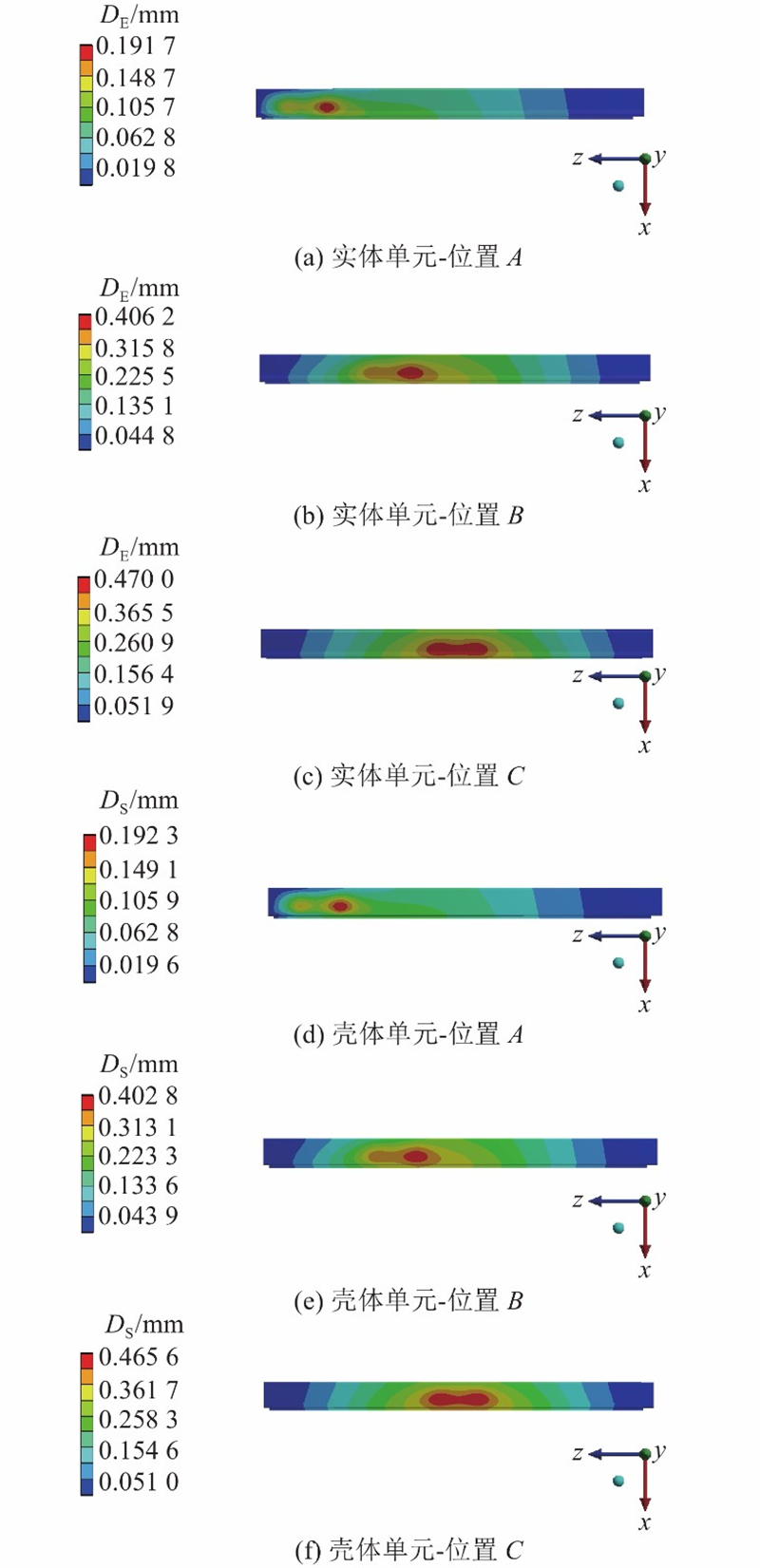
实体单元
0.192
20.743
0.406
22.973
0.470
22.436
339488
310
壳单元
0.192
19.882
0.403
22.645
0.466
23.190
136448
202
Tab.2Comparison of simulation results between solid elements and shell elements
Fig.4Deformation cloud diagrams of solid element and shell element for crossbeam structure
位置
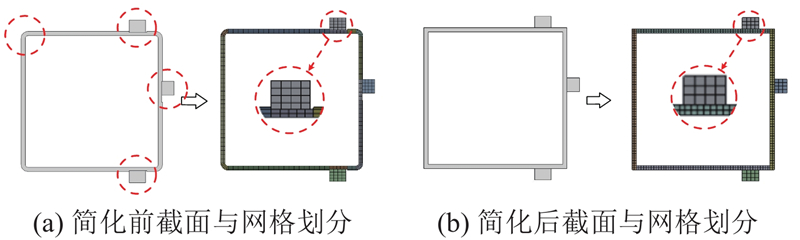
Sb/mm
Sa/mm
DF/mm
位置A
0.249
0.236
0.013
位置B
0.528
0.509
0.019
位置C
0.586
0.581
0.005
Tab.3Comparison of maximum total deformation before and after simplification of cross section
Fig.5Comparison of beam cross section before and after simplification and mesh generation
Fig.6Theoretical mechanical model of fixed beam at both ends
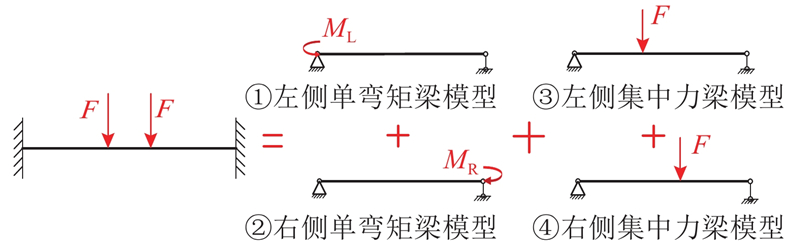
Fig.7Equivalent mechanical model of beam
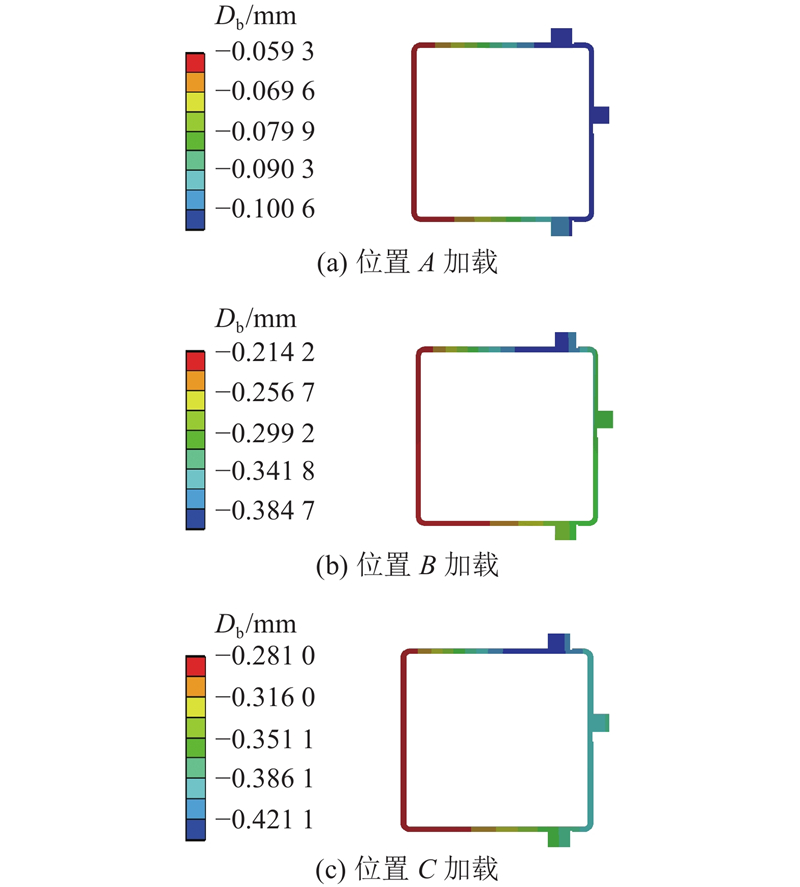
位置
Dth/mm
Ds/mm
Der/mm
位置A
0.074
0.084
0.010
位置B
0.281
0.284
0.003
位置C
0.353
0.349
0.004
Tab.4Comparison between theoretical deformation and simulation deformation of beam structure
Fig.8Deformation cloud image of beam section at the biggest deflection
阶数
f/Hz
阶数
f/Hz
1
47.713
6
133.860
2
49.495
7
171.090
3
109.290
8
173.640
4
117.900
9
176.920
5
121.220
10
177.690
Tab.5First 10 natural frequencies of crossbeam structure
Fig.9Cloud diagram of first 6 modes of model shapes
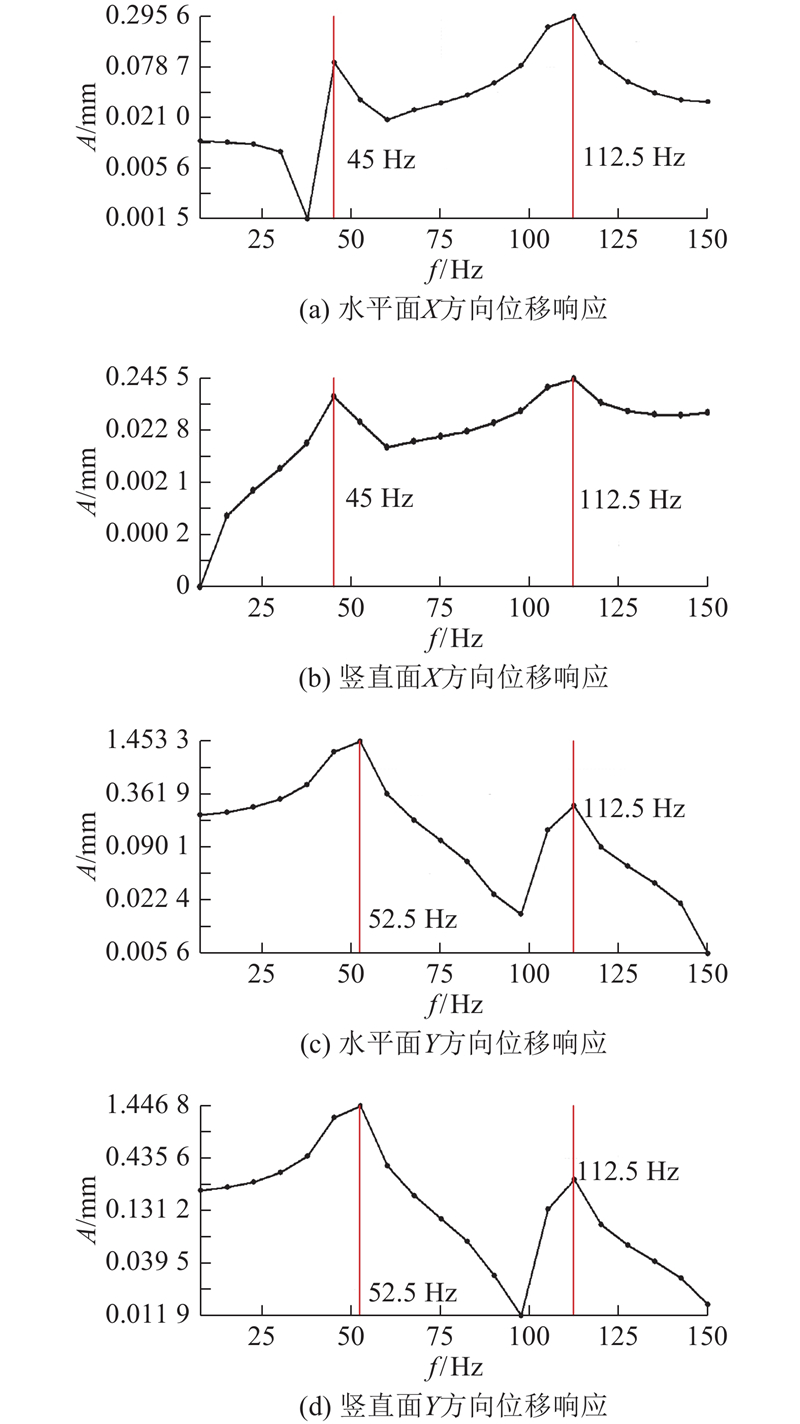
Fig.10Position of horizontal plane (up) and vertical plane (down)
Fig.11Displacement response curve of crossbeam structure
尺寸范围
P1
P2
P3
P4
P5
P6
P7
初始值
12
12
376
376
44
46
32
下限
9
9
280
280
35
40
25
上限
14
14
420
420
50
60
35
Tab.6Variation range of cross-beam section size parameters mm
Fig.12Optimized cross-sectional structure (left) and meshed cross-section (right)
Fig.13CCD and OSF design sample points and response points
评判参数
CCD
OSF
f
m
d
σ
f
m
d
σ
测定系数
0.999
1.000
0.999
1.000
0.999
1.000
1.000
0.999
最大相对残差
0.000
0.000
0.011
0.000
0.000
0.000
0.000
0.000
均方根误差
0.000
0.000
0.000
0.000
0.000
0.002
0.000
0.000
相对均方根误差
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
相对最大 绝对误差
0.033
0.000
0.067
0.000
0.018
0.000
0.000
0.027
相对平均 绝对误差
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
Tab.7Fitting accuracy of CCD and OSF
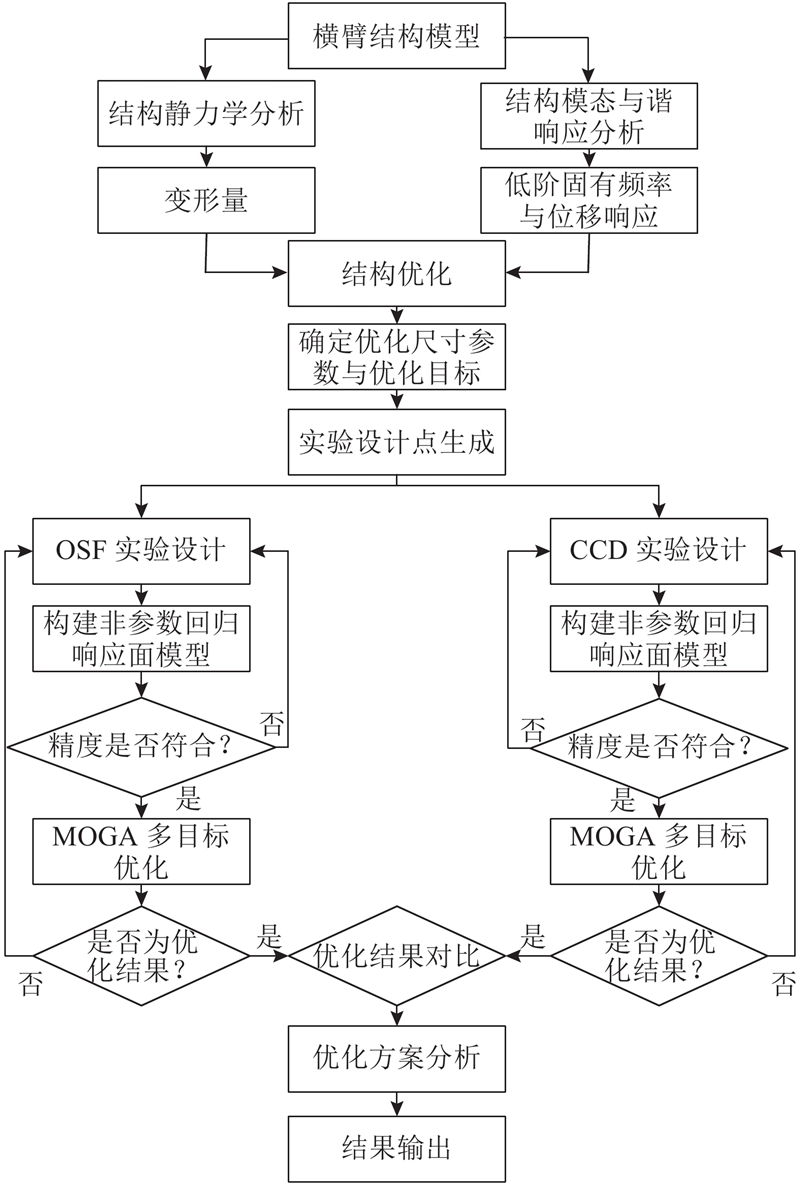
Fig.14Optimization process of beam structural size
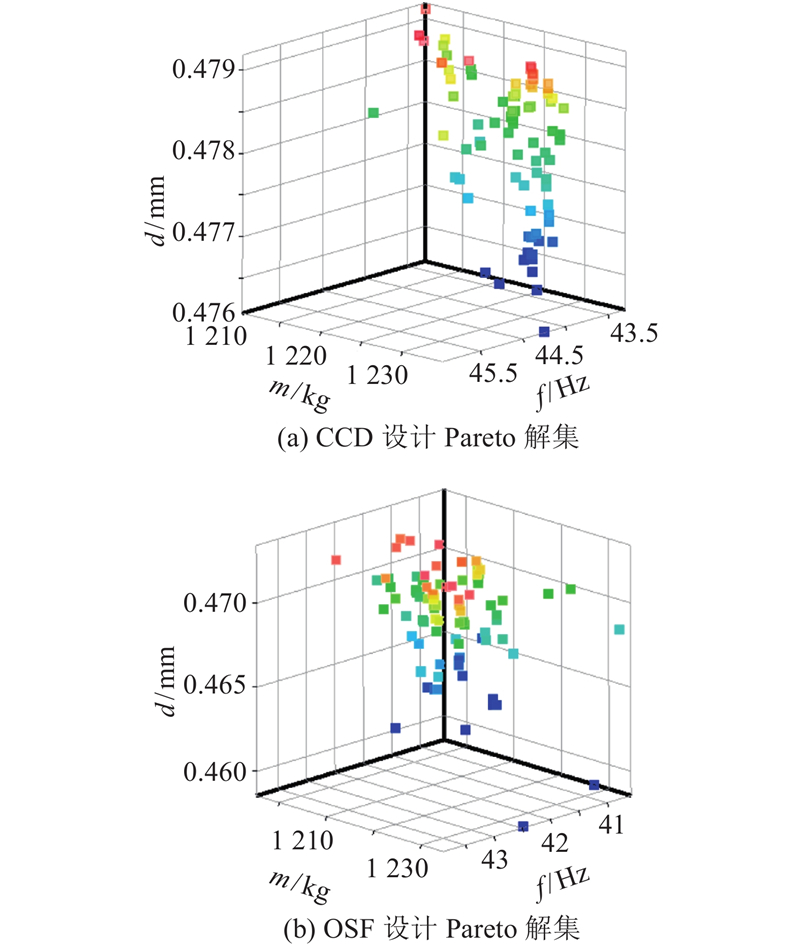
Fig.15CCD design Pareto solution set and OSF design Pareto solution set
mm
方案
P1
P2
P3
P4
P5
P6
P7
1
11.15
12.61
344.90
392.34
41.75
52.49
29.95
2
11.14
12.48
342.28
392.19
41.89
52.59
29.94
3
11.16
12.61
344.14
391.83
41.38
52.52
29.98
4
11.19
12.27
344.18
392.17
42.82
52.64
29.94
5
11.16
12.61
343.98
392.31
41.39
52.48
29.95
原始
12.00
12.00
376.00
376.00
44.00
46.00
32.00
Tab.8Size optimization results of CCD experiment design
mm
方案
P1
P2
P3
P4
P5
P6
P7
1
10.96
12.95
333.13
393.66
42.99
54.67
29.72
2
12.38
12.44
312.45
411.90
41.11
48.11
31.48
3
11.00
12.82
323.83
411.26
43.63
51.20
29.64
4
11.00
12.82
323.64
409.63
42.49
54.68
29.65
5
11.00
12.82
323.64
409.63
42.49
54.73
29.65
原始
12.00
12.00
376.00
376.00
44.00
46.00
32.00
Tab.9Size optimization results of OSF experiment design
方案
CCD
OSF
f/Hz
vf/%
d/μm
vd/%
m/kg
vm/%
f/Hz
vf/%
d/μm
vd/%
m/kg
vm/%
1
44.72
?8.08
476.10
?16.03
1234.70
?0.11
42.45
?12.74
458.56
?19.13
1234.32
?0.14
2
44.34
?8.86
476.32
?16.00
1225.20
?0.87
41.13
?15.46
459.67
?18.93
1233.54
?0.20
3
44.61
?8.30
476.50
?15.96
1232.71
?0.27
42.09
?13.48
462.59
?18.41
1217.82
?1.47
4
44.70
?8.12
476.60
?15.94
1227.28
?0.71
41.74
?14.20
463.84
?18.20
1219.58
?1.33
5
44.59
?8.35
476.70
?15.93
1231.95
?0.33
41.74
?14.20
464.20
?18.13
1219.42
?1.34
原始
48.65
0.00
567.00
0.00
1236.00
0.00
48.65
0.00
567.00
0.00
1236.00
0.00
Tab.10Optimization results of frequency, deformation, mass of CCD and OSF experiment design
Fig.16Comparison of CCD and OSF design optimization effect and original model
Fig.17Comparison of optimization results between CCD experiment design and OSF experiment design
[1]
何敏, 田晓美 汽车制造业物流新技术的应用探索[J]. 物流技术与应用, 2019, 24 (9): 121- 122 HE Min, TIAN Xiao-mei Application of new logistics technologies in automobile manufacturing industry[J]. Logistics and Material Handling, 2019, 24 (9): 121- 122
doi: 10.3969/j.issn.1007-1059.2019.09.017
[2]
ZHU H B, WANG B, CHEN W. Dynamic performance analysis of truss robot based on RecurDyn and experimental research [C]//2016 Asia-Pacific Conference on Intelligent Robot Systems. Tokyo: IEEE, 2016: 31-35.
[3]
陈骏, 陈威 桁架机器人动态特性分析及实验研究[J]. 机械工程与自动化, 2018, (2): 86- 87 CHEN Jun, CHEN Wei Dynamic characteristics analysis and experimental research of truss robots[J]. Mechanical Engineering and Automation, 2018, (2): 86- 87
doi: 10.3969/j.issn.1672-6413.2018.02.033
[4]
TIAN D, DENG Z Q, LIU R Q, et al. Analysis on dynamic response of truss structure for deployable truss antenna [C]//9th World Congress on Intelligent Control and Automation. Taipei: IEEE, 2011: 1185-1188.
[5]
于锋钊, 赵明扬, 辛立明, 等 基于ANSYS的龙门式直角坐标机器人横梁分析[J]. 机械设计与制造, 2008, (5): 182- 183 YU Feng-zhao, ZHAO Ming-yang, XIN Li-ming, et al Analysis on beam of the portal-type cartesian-coordinate robot based on ANSYS[J]. Mechanical Design and Manufacturing, 2008, (5): 182- 183
doi: 10.3969/j.issn.1001-3997.2008.05.077
[6]
WU M Y, LIU Y J, CAI H G Dynamic analysis and optimization for Wafer handling robot[J]. Advanced Materials Research, 2014, 898: 657- 662
doi: 10.4028/www.scientific.net/AMR.898.657
[7]
吴志军, 冯平法, 郁鼎文, 等 典型数控龙门镗铣床主轴系统抗振性能优化[J]. 清华大学学报:自然科学版, 2010, 50 (7): 995- 999 WU Zhi-jun, FENG Ping-fa, YU Ding-wen, et al Optimization of the dynamic behavior of a spindle system for a CNC gantry-type boring and milling machine[J]. Journal of Tsinghua University: Natural Science Edition, 2010, 50 (7): 995- 999
[8]
于长亮, 张辉, 王仁彻, 等 机床整机动刚度薄弱环节辨识与优化方法研究[J]. 机械工程学报, 2013, 49 (21): 11- 17 YU Chang-liang, ZHANG Hui, WANG Ren-che, et al Study on method for weak link identification of dynamic stiffness of a machine tool and optimization design[J]. Journal of Mechanical Engineering, 2013, 49 (21): 11- 17
doi: 10.3901/JME.2013.21.011
[9]
童水光, 苗嘉智, 童哲铭, 等 内燃叉车车架静动特性有限元分析及优化[J]. 浙江大学学报:工学版, 2019, 53 (9): 1637- 1646 TONG Shui-guang, MIAO Jia-zhi, TONG Zhe-ming, et al Finite element analysis and optimization for static and dynamic characteristics of diesel forklift frame[J]. Journal of Zhejiang University: Engineering Science, 2019, 53 (9): 1637- 1646
[10]
王彪. 桁架机器人耦合特性分析与结构优化[D]. 安徽: 合肥工业大学, 2017. WANG Biao. Coupling characteristics analysis and structural optimization of truss robots [D]. Anhui: Hefei University of Technology, 2017.
[11]
张宇, 李慎华, 李潍, 等 高速铁路道岔数控龙门铣床的尺寸优化研究[J]. 机电工程, 2019, 36 (9): 893- 899 ZHANG Yu, LI Shen-hua, LI Wei, et al Size optimization for CNC gantry milling machine of high speed railway turnout[J]. Journal of Mechanical and Electrical Engineering, 2019, 36 (9): 893- 899
doi: 10.3969/j.issn.1001-4551.2019.09.003
[12]
袁波. 基于有限元法桁架机器人结构分析与优化[D]. 扬州: 扬州大学, 2018. YUAN Bo. Analysis and optimization of truss robot structure based on finite element method [D]. Yangzhou: Yangzhou University, 2018.
[13]
彭军 门式起重机主梁静动态特性分析[J]. 机械与电子, 2019, 37 (9): 16- 19 PENG Jun Analysis of static and dynamic characteristics of gantry crane girder[J]. Machinery and Electronics, 2019, 37 (9): 16- 19
doi: 10.3969/j.issn.1001-2257.2019.09.004
[14]
彭真. 典型工况下四自由度高速重载机器人起动特性的研究 [D]. 河北: 燕山大学, 2015. PENG Zhen. The research of staring characteristics on 4D of high-speed and heavy-load robot in the typical condition [D]. Hebei: Yanshan University, 2015.
[15]
LI D F, CHEN S Y, HUANG H, et al Improved genetic algorithm with two-level approximation for truss topology optimization[J]. Structural and Multidisciplinary Optimization, 2014, 49 (5): 795- 814
doi: 10.1007/s00158-013-1012-8
[16]
JAMARIYA V N, PANCHAL D D, TARE S R. Structural optimization of truss using finite element analysis [C]//International Conference on Smart City and Emerging Technology. Mumbai: IEEE, 2018: 1-5.
[17]
SOROKIN S V, NIELSEN J B, OLHOFF N Analysis and optimization of energy flows in structures composed of beam elements – Part Ⅱ: examples and discussion[J]. Structural and Multidisciplinary Optimization, 2001, 22 (1): 12- 23
doi: 10.1007/s001580100121
[18]
李世杰, 郑培飞, 温帅, 等 基于ANSYS Workbench的焊接机器人的性能分析[J]. 河北工业大学学报, 2019, 48 (4): 30- 35 LI Shi-jie, ZHENG Pei-fei, WEN Shuai, et al Performance analysis of welding robot based on ANSYS Workbench[J]. Journal of Hebei University of Technology, 2019, 48 (4): 30- 35
[19]
AGARWAL S, VASAN A. Computational strategy for structural analysis, design, and optimization of trusses using genetic algorithm and particle swarm optimization [C]//IEEE 6th International Conference on Advanced Computing. Bhimavaram: IEEE, 2016: 203-207.
[20]
曾攀. 有限元分析基础教程[M]. 北京: 清华大学出版社, 2008: 63-70.
[21]
孙训方, 方孝淑, 关来泰. 材料力学Ⅱ[M]. 北京: 高等教育出版社, 2002.
[22]
商跃进. 有限元原理与ANSYS应用指南[M]. 北京: 清华大学出版社, 2005.
[23]
叶爽, 刘强, 黄坤兰, 等 基于OSF和RSM的轻轨独立轮轴桥优化设计[J]. 机械强度, 2020, 42 (3): 604- 609 YE Shuang, LIU Qiang, HUANG Kun-lan, et al Optimal design of the independent wheel axle-axle based on OSF and RSM[J]. Journal of Mechanical Strength, 2020, 42 (3): 604- 609
[24]
曾漾, 周俊, 沈志远, 等 基于响应面法的复合材料舱壁结构优化设计[J]. 重庆大学学报, 2020, 43 (6): 82- 89 ZENG Yang, ZHOU Jun, SHEN Zhi-yuan, et al Optimization design of composite bulkhead structure based on response surface method[J]. Journal of Chongqing University, 2020, 43 (6): 82- 89