| Mechanical and Energy Engineering |
|


|
|
|
| Finite time disturbance observer based robust integral tracking control |
Qian-ting ZHAO( ),Jian-yong YAO*(),Zhi-kai YAO ),Jian-yong YAO*(),Zhi-kai YAO |
| College of Mechanical Engineering, Nanjing University of Science and Technology, Nanjing 210094, China |
|
|
|
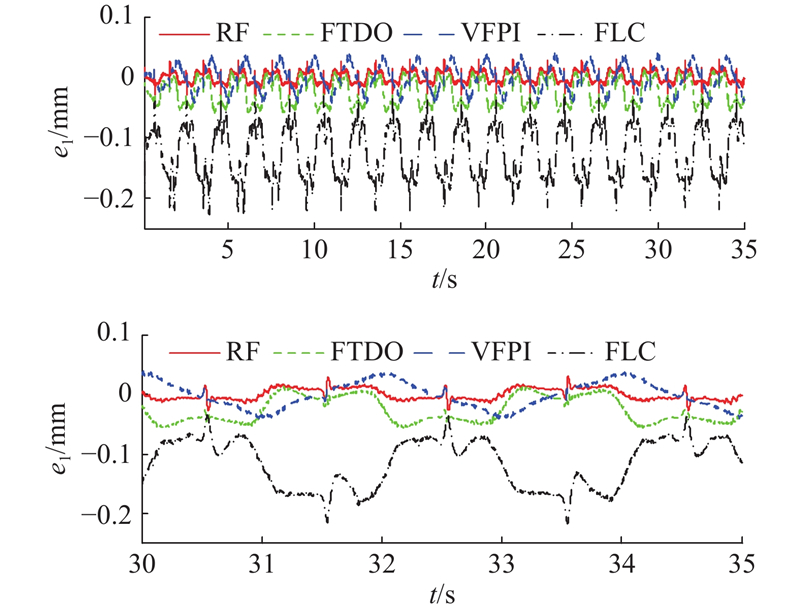
Abstract A finite time disturbance observer (FTDO) based robust integral tracking control strategy was proposed aiming at the problem that electro-hydraulic position servo system typically exists parameter uncertainties and uncertain nonlinearities (collectively referred as disturbance), which would lead to some control problems such as low accuracy and poor tracking performance for traditional nonlinear control strategies. A robust integral of the sign of the error (RISE) control strategy was integrated with FTDO in order to achieve the suppression of unobserved disturbance. The desired compensation technique was employed in the controller development by considering the influence of noise on the tracking accuracy in the practical system in order to improve the tracking accuracy. The global asymptotic stability of the closed-loop system was verified by the Lyapunov stability theory. Comparative experimental results show that the proposed method can effectively improve the tracking performance of the electro-hydraulic position servo system under the influence of disturbance. The tracking accuracy can be improved about 25% compared with velocity feedforward PI controller in the same test condition.
|
|
Received: 24 August 2018
Published: 30 September 2019
|
|
|
|
Corresponding Authors:
Jian-yong YAO
E-mail: qting_zhao@163.com;jerryyao.buaa@gmail.com
|
基于有限时间干扰观测器的鲁棒积分跟踪控制
针对电液位置伺服系统同时存在的参数不确定和不确定非线性(统称为干扰),导致传统非线性控制精度不高、跟踪性能不好等问题,提出基于有限时间干扰观测器(FTDO)的鲁棒积分跟踪控制策略. 通过将误差符号鲁棒积分(RISE)控制策略与FTDO融合,实现对未观测干扰的抑制. 考虑到实际系统中噪声对跟踪精度的影响,该控制策略结合期望补偿手段,提高跟踪精度. 通过Lyapunov稳定性理论,证明了闭环系统的全局渐进稳定性. 对比实验结果显示,利用该方法能够有效提高电液位置伺服系统在干扰作用下的跟踪性能,在相同的测试工况下,与速度前馈PI控制器相比,跟踪精度提高了25%左右.
关键词:
电液位置伺服系统,
匹配和不匹配干扰,
有限时间干扰观测器(FTDO),
误差符号鲁棒积分(RISE)控制,
渐进稳定
|
|
| [1] |
庞伟. 某液压实验台的建模仿真与控制研究[D]. 南京: 南京理工大学, 2016.
PANG Wei. Research on modeling simulation and control of a hydraulic experimental table [D]. Nanjing: Nanjing University of Science and Technology, 2016.
|
|
|
| [2] |
岳欣, 姚建勇 基于积分鲁棒的电液负载模拟器渐近跟踪控制[J]. 航空学报, 2017, 38 (2): 289- 298
YUE Xin, YAO Jian-yong Asymptotic tracking control of electro-hydraulic load simulator based on integral robustness[J]. Journal of Aeronautics, 2017, 38 (2): 289- 298
|
|
|
| [3] |
LU H, LIN W Robust controller with disturbance rejection for hydraulic servo systems[J]. IEEE Transactions on Industrial Electronics, 1993, 40 (1): 157- 162
doi: 10.1109/41.184833
|
|
|
| [4] |
WANG C, JIAO Z, QUAN L Nonlinear robust dual-loop control for electro-hydraulic load simulator[J]. ISA Transactions, 2015, 59: 280- 289
doi: 10.1016/j.isatra.2015.10.013
|
|
|
| [5] |
GUO Q, YU T, JIANG D Robust H∞ positional control of 2-DOF robotic arm driven by electro-hydraulic servo system[J]. ISA Transactions, 2015, 59: 55- 64
doi: 10.1016/j.isatra.2015.09.014
|
|
|
| [6] |
YAO B, TOMIZUKA M Adaptive robust control of SISO nonlinear systems in a semi-strict feedback form[J]. Automatica, 1997, 33 (5): 893- 900
doi: 10.1016/S0005-1098(96)00222-1
|
|
|
| [7] |
MOHANTY A, YAO B Integrated direct/Indirect adaptive robust control of hydraulic manipulators with valve deadband[J]. IEEE/ASME Transactions on Mechatronics, 2011, 16 (4): 707- 715
doi: 10.1109/TMECH.2010.2051037
|
|
|
| [8] |
YAO B, BU F, REEDY J, et al Adaptive robust motion control of single-rod hydraulic actuators: theory and experiments[J]. IEEE/ASME Transactions on Mechatronics, 2000, 5 (1): 79- 91
doi: 10.1109/3516.828592
|
|
|
| [9] |
LIU S, YAO B Coordinate control of energy saving programmable valves[J]. IEEE Transactions on Control Systems Technology, 2007, 16 (1): 34- 45
|
|
|
| [10] |
BU F, YAO B. Desired compensation adaptive robust control of single-rod electro-hydraulic actuator [C] // Proceedings of American Control Conference. Arlington: IEEE, 2001: 3926-3931.
|
|
|
| [11] |
YAO J, JIAO Z, MA D Extended-state-observer-based output feedback nonlinear robust control of hydraulic systems with backstepping[J]. IEEE Transactions on Industrial Electronics, 2014, 61 (11): 6285- 6293
doi: 10.1109/TIE.2014.2304912
|
|
|
| [12] |
GUO Q, ZHANG Y, CELLER B G, et al Backstepping control of electro-hydraulic system based on extended-state-observer with plant dynamics largely unknown[J]. IEEE Transactions on Industrial Electronics, 2016, 63 (11): 6909- 6920
doi: 10.1109/TIE.2016.2585080
|
|
|
| [13] |
KIM W, SHIN D, WON D, et al Disturbance-observer-based position tracking controller in the presence of biased sinusoidal disturbance for electro-hydraulic actuators[J]. IEEE Transactions on Control Systems Technology, 2013, 21 (6): 2290- 2298
doi: 10.1109/TCST.2013.2237909
|
|
|
| [14] |
WON D, KIM W, SHIN D, et al High-gain disturbance observer-based backstepping control with output tracking error constraint for electro-hydraulic systems[J]. IEEE Transactions on Control Systems Technology, 2015, 23 (2): 787- 795
doi: 10.1109/TCST.2014.2325895
|
|
|
| [15] |
LEVANT A Higher-order sliding modes, differentiation and output-feedback control[J]. International Journal of Control, 2003, 76 (9/10): 924- 941
|
|
|
| [16] |
SHTESSEL Y B, SHKOLNIKOV I A, LEVANT A Smooth second-order sliding modes: missile guidance application[J]. Automatica, 2007, 43 (8): 1470- 1476
doi: 10.1016/j.automatica.2007.01.008
|
|
|
| [17] |
LI S, SUN H, YANG J, et al Continuous finite-time output regulation for disturbed systems under mismatching condition[J]. IEEE Transactions on Automatic Control, 2015, 60 (1): 277- 282
doi: 10.1109/TAC.2014.2324212
|
|
|
| [18] |
FREEMAN R A, KRSTIC M, KOKOTOVIC P V Robustness of adaptive nonlinear control to bounded uncertainties[J]. IFAC Proceedings Volumes, 1996, 29 (1): 2726- 2731
doi: 10.1016/S1474-6670(17)58088-X
|
|
|
| [19] |
FUKUSHIMA H, MURO K, MATSUNO F Sliding-mode control for transformation to an inverted pendulum mode of a mobile robot with wheel-arms[J]. IEEE Transactions on Industrial Electronics, 2015, 62 (7): 4257- 4266
doi: 10.1109/TIE.2014.2384475
|
|
|
| [20] |
XIAN B, DAWSON D M, DE QUEIROZ M S, et al A continuous asymptotic tracking control strategy for uncertain nonlinear systems[J]. IEEE Transactions on Automatic Control, 2004, 49 (7): 1206- 1211
doi: 10.1109/TAC.2004.831148
|
|
|
| [21] |
MAKKAR C, HU G, SAWYER W G, et al Lyapunov-based tracking control in the presence of uncertain nonlinear parameterizable friction[J]. IEEE Transactions on Automatic Control, 2007, 52 (10): 1988- 1994
doi: 10.1109/TAC.2007.904254
|
|
|
| [22] |
PATRE P M, MACKUNIS W, MAKKAR C, et al. Asymptotic tracking for systems with structured and unstructured uncertainties [C] // 2006 45th IEEE Conference on Decision and Control. San Diego: IEEE, 2006: 441-446.
|
|
|
| [23] |
PATRE P M, MACKUNIS W, DUPREE K, et al Modular adaptive control of uncertain Euler-Lagrange systems with additive disturbances[J]. IEEE Transactions on Automatic Control, 2011, 56 (1): 155- 160
doi: 10.1109/TAC.2010.2081770
|
|
|
| [24] |
CAI Z, DE QUEIROZ M S, DAWSON D M Robust adaptive asymptotic tracking of nonlinear systems with additive disturbance[J]. IEEE Transactions on Automatic Control, 2006, 51 (3): 524- 529
doi: 10.1109/TAC.2005.864204
|
|
|
| [25] |
PATRE P M, MACKUNIS W, JOHNSON M, et al Composite adaptive control for Euler-Lagrange systems with additive disturbances[J]. Automatica, 2010, 46 (1): 140- 147
doi: 10.1016/j.automatica.2009.10.017
|
|
|
| [26] |
DENG W, YAO J Adaptive integral robust control and application to electromechanical servo systems[J]. ISA Transactions, 2017, 67: 256- 265
doi: 10.1016/j.isatra.2017.01.024
|
|
|
| [27] |
TATLICIOGLUT E Adaptive control of non-linear teleoperator systems in the presence of additive input and output disturbances[J]. International Journal of Robotics and Automation, 2010, 25 (1): 17
|
|
|
| [28] |
YAO J, JIAO Z, MA D, et al High-accuracy tracking control of hydraulic rotary actuators with modeling uncertainties[J]. IEEE/ASME Transactions on Mechatronics, 2014, 19 (2): 633- 641
doi: 10.1109/TMECH.2013.2252360
|
|
|
| [29] |
XU Y, MOHSENI K Bioinspired hydrodynamic force feedforward for autonomous underwater vehicle control[J]. IEEE/ASME Transactions on Mechatronics, 2014, 19 (4): 1127- 1137
doi: 10.1109/TMECH.3516
|
|
|
| [30] |
邓文翔, 马吴宁, 姚建勇 机电伺服系统鲁棒自适应重复控制[J]. 上海交通大学学报, 2016, 50 (9): 1486- 1492
DENG Wen-xiang, MA Wu-ning, YAO Jian-yong Robust adaptive repetitive control of electro-mechanical servo systems[J]. Journal of Shanghai Jiaotong University, 2016, 50 (9): 1486- 1492
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|