|
|
|
| Dynamic analysis and parameter optimization of under-actuated heterogeneous lower limb rehabilitation robot |
Wei-da LI( ),Juan LI*(),Xiang LI,Hong-miao ZHANG,Hong GU,Yi-peng SHI,Hao-jie ZHANG,Li-ning SUN ),Juan LI*(),Xiang LI,Hong-miao ZHANG,Hong GU,Yi-peng SHI,Hao-jie ZHANG,Li-ning SUN |
| Jiangsu Provincial Key Laboratory of Advanced Robotics, School of Mechanical and Electrical Engineering, Suzhou University, Suzhou 215021, China |
|
|
|
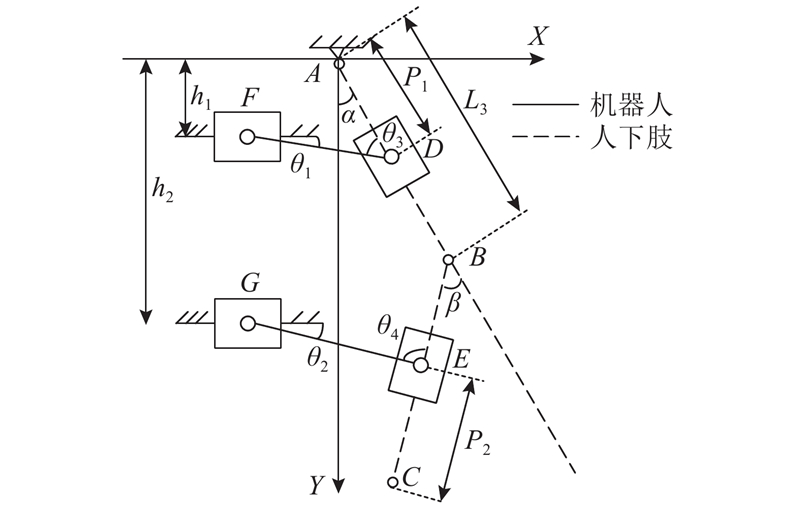
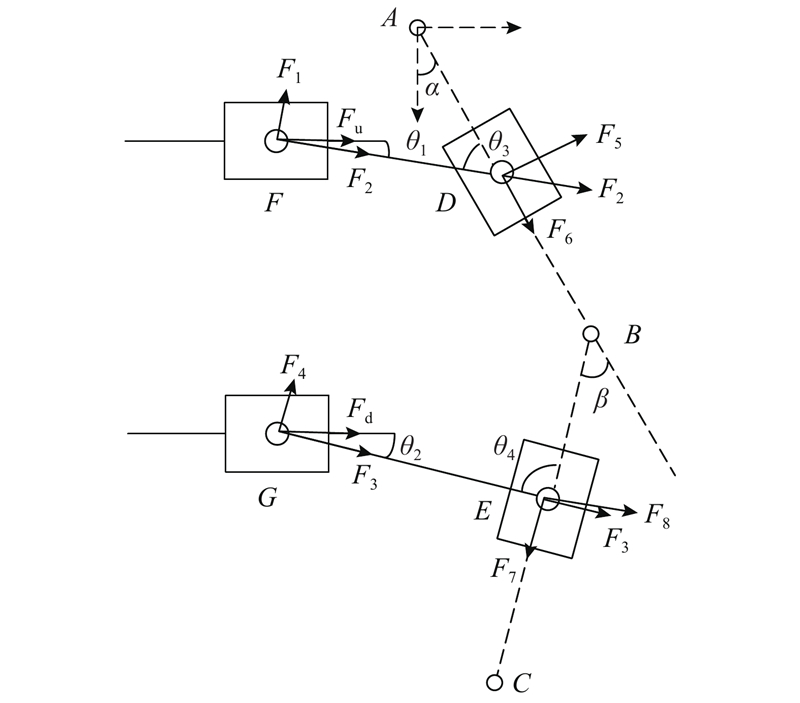
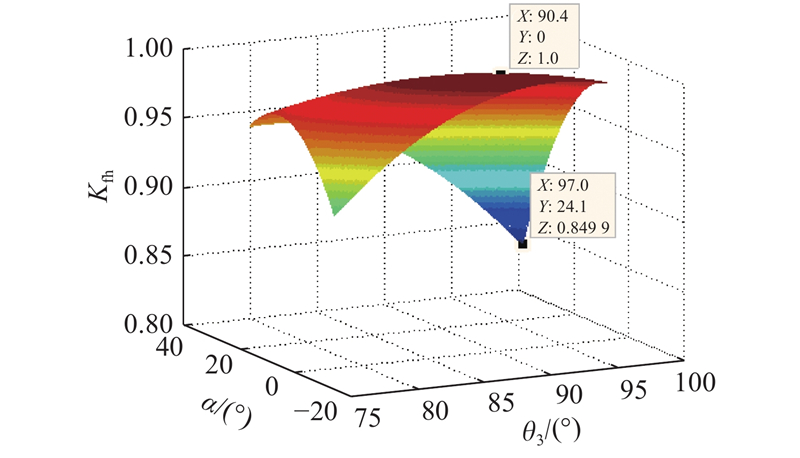
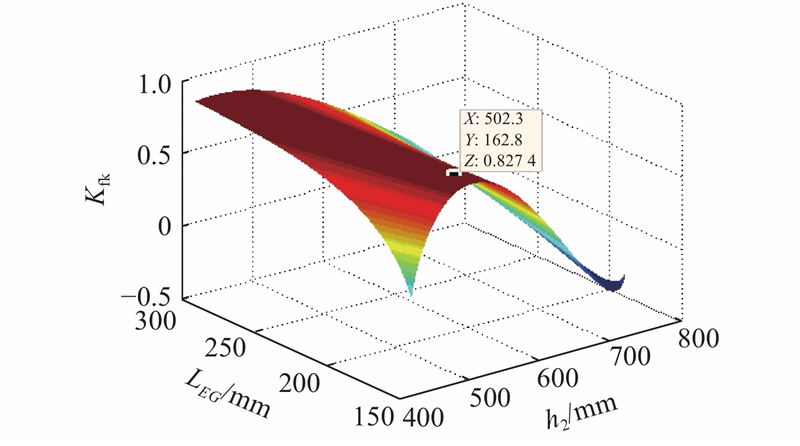
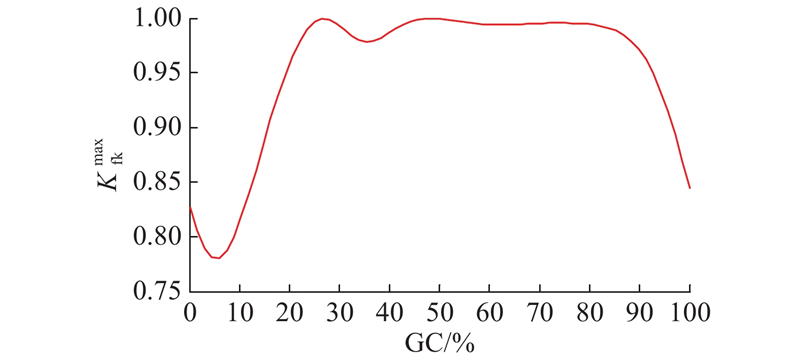
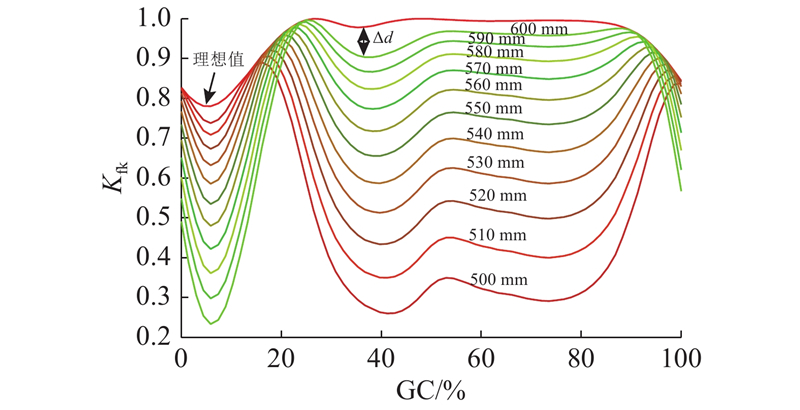
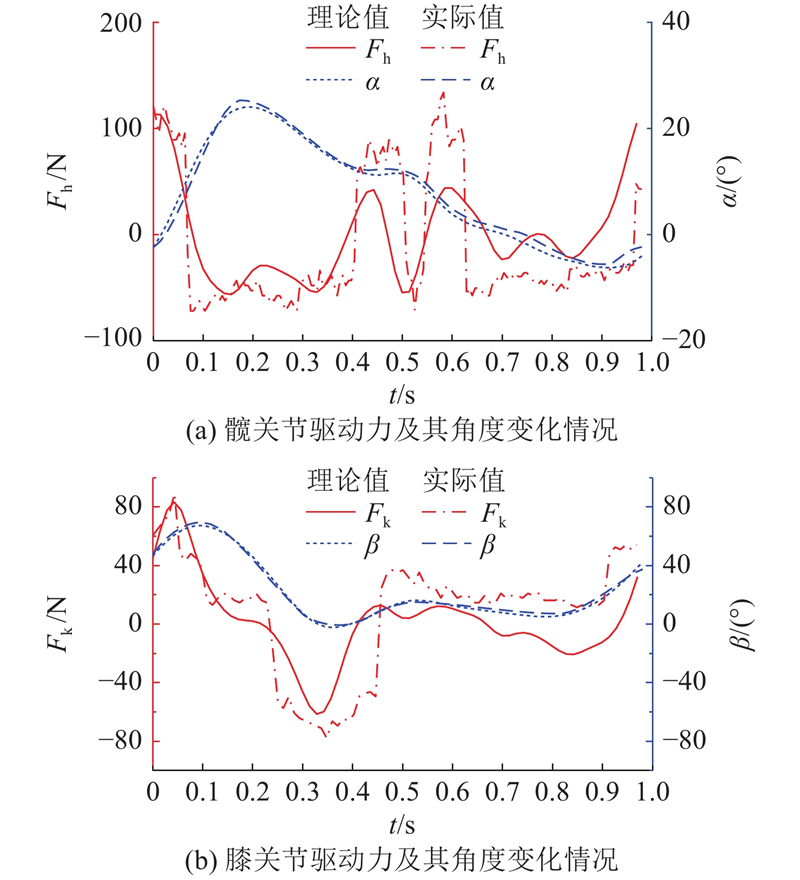
Abstract An under-actuated lower limb rehabilitation robot was proposed aiming at the problems of human-machine DOFS mismatch and poor joint neutrality of existing exoskeletons robots. The under-actuated robot system only has four linear drives. The linear motion driven by the robot is transformed into the flexion and extension of lower limbs in the sagittal plane through connecting rod and human-machine connection mechanism. Human-machine coupling model was established for robot systems, and then dynamics analysis was carried out. The parameters in the human-machine coupling model that affect dynamic results were analyzed, a method to analyze the relationship between driving force and limb driving force was proposed, then the parameters with the maximum thrust coefficient as the target were analyzed and optimized, and the best structural parameters were obtained. Finally, the rehabilitation robot system was established based on the optimized structural parameters. The driving force and the angle of hip and knee joints were compared. Experimental results showed that the maximum error of the hip joint angle was 2.9°, the maximum angle error of the knee joint was 6.4°, and the maximum errors were about 9%, which verified the correctness of the dynamic model and the parameter optimization results.
|
|
Received: 19 March 2020
Published: 09 March 2021
|
|
|
| Fund: 国家重点研发计划资助项目(2018YFC2001304);国家自然科学基金资助项目(51475314) |
|
Corresponding Authors:
Juan LI
E-mail: hit_liweida@163.com;lijuan@sudu.edu.cn
|
欠驱动异构式下肢康复机器人动力学分析及参数优化
针对现有外骨骼机器人人机自由度不匹配和关节对中性差的问题,提出欠驱动下肢康复机器人. 欠驱动机器人只有4个直线驱动,驱动的直线运动通过推杆和人机连接机构转化为人下肢在矢状面内的屈伸运动,带动人体进行步态康复训练. 建立机器人系统的人机耦合模型,进行模型的动力学分析,对人机耦合模型中影响动力学结果的参数进行分析,建立驱动力与肢体推动力之间的关系模型,并以推力系数最大为目标进行参数分析与优化,得到最佳的结构参数. 根据优化后的结构参数搭建康复机器人实验系统,对髋、膝关节驱动力与角度进行对比. 实验结果表明最大髋关节角度误差为2.9°,最大膝关节角度误差为6.4°,最大误差均约为9%,验证了动力学模型和参数优化结果的正确性.
关键词:
下肢康复机器人,
异构式构型,
欠驱动机器人,
动力学分析,
参数优化
|
|
| [1] |
BOUDARHAM J, ROCHE N, PRADON D, et al Variations in kinematics during clinical gait analysis in stroke patients[J]. Plos One, 2013, 8 (6): 1- 9
|
|
|
| [2] |
KAWAMOTO H, KAMIBAYASHI K, NAKATA Y, et al Pilot study of locomotion improvement using hybrid assistive limb in chronic stroke patients[J]. BMC Neurology, 2013, 13 (1): 141- 148
doi: 10.1186/1471-2377-13-141
|
|
|
| [3] |
穆光宗 我国机构养老发展的困境与对策[J]. 华中师范大学学报人文社会科学版, 2012, 51 (2): 31- 38
MU Guang-zong The difficulties and countermeasures of institutional pension development in China[J]. Journal of Huazhong Normal University: Humanities and Social Sciences, 2012, 51 (2): 31- 38
|
|
|
| [4] |
秦涛, 张立勋 考虑跖趾关节运动的踏板式步行康复机器人运动规划[J]. 机器人, 2014, 36 (3): 330- 336
QIN Tao, ZHANG Li-xun Motion planning of a footpad-type walking rehabilition robot considering motion of metatarsophalangeal joint[J]. Robot, 2014, 36 (3): 330- 336
|
|
|
| [5] |
徐国政, 宋爱国, 高翔 基于混杂理论的机器人辅助康复治疗控制方法[J]. 机器人, 2014, 36 (6): 641- 646
XU Guo-zheng, SONG Ai-guo, GAO Xiang Therapeutic control method for robotic-aided rehabilitation training based on hybrid theory[J]. Robot, 2014, 36 (6): 641- 646
|
|
|
| [6] |
SHIBENDU S R, DILIP K P Kinematics, dynamics and power consumption analyses for turning motion of a six-legged robot[J]. Journal of Intelligent and Robotic Systems, 2014, 74 (3/4): 663- 688
|
|
|
| [7] |
魏小东, 孟青云, 喻洪流, 等 下肢外骨骼机器人研究进展[J]. 中国康复医学杂志, 2019, 34 (4): 491- 495
WEI Xiao-dong, MENG qing-yun, YU Hong-liu, et al Research progress of lower limb exoskeleton robot[J]. Chinese Journal of Rehabilitation Medicine, 2019, 34 (4): 491- 495
doi: 10.3969/j.issn.1001-1242.2019.04.025
|
|
|
| [8] |
KAWAMOTO H. Power assist method for HAL-3 using EMG-based feedback controller [C]// IEEE International Conference on Systems, Man and Cybernetics. Manchester: IEEE, 2003: 1648-1653.
|
|
|
| [9] |
VAN A, EKKELENKAMP R, VENEMAN J F, et al. Selective control of a subtask of walking in arobotic gait trainer (LOPES) [C]// IEEE 10th International Conference on Rehabilitation Robotics. Noordwijk: IEEE, 2007: 841-848.
|
|
|
| [10] |
范伯骞. 液压驱动下肢外骨骼机器人关键技术研究[D]. 杭州: 浙江大学, 2017.
FAN Bo-qian. Research on the key technologies of the hydraulic lower limb exoskeleton robot [D]. Hangzhou: Zhejiang University, 2017.
|
|
|
| [11] |
麻天照. 下肢外骨骼康复机器人控制系统设计与研究[D]. 成都: 电子科技大学, 2015.
MA Tian-zhao. Research and design on control system of an lower limb rehabilitation robot [D]. Chendu: University of Electronic Science and Technology of China, 2015.
|
|
|
| [12] |
GUO B J, HAN J H, LI X P, et al A wearable somatosensory teaching device with adjustable operating force for gait rehabilitation training robot[J]. Advances in Mechanical Engineering, 2017, 9 (10): 1- 14
|
|
|
| [13] |
LIU F Y, LU C Y, HE L Design and motion analysis of lower limbs in modular nursing bed[J]. Journal of Engineering Design, 2014, 21 (6): 583- 588
|
|
|
| [14] |
汪步云, 王月朋, 梁艺, 等 下肢外骨骼助力机器人关节驱动设计及试验分析[J]. 机械工程学报, 2019, 55 (23): 55- 66
WANG Bu-yun, WANG Yue-peng, LIANG Yi, et al Design on articular motion and servo driving with experimental analysis for lower limb exoskeleton robot[J]. Journal of Mechanical Engineering, 2019, 55 (23): 55- 66
|
|
|
| [15] |
LI W D, ZHANG H J, LI J, et al. An evaluation method of wearing comfort for exoskeleton robots [C]// IEEE International Conference on Robotics and Biomimetics. Kuala Lumpur: IEEE, 2018: 2439-2443.
|
|
|
| [16] |
LI W D, LI J, LI X, et al. Development of a parameter adaptation robot for lower limb rehabilitation [C]// IEEE International Conference on Cybernetics and Intelligent Systems and IEEE Conference on Robotics, Automation and Mechatronics. Bangkok: IEEE, 2019: 7-11.
|
|
|
| [17] |
ZHU Q H, CHEN Z L, LI W D, et al. Structure design and analysis of compliant human-machine interface mechanism for exoskeletons [C]// IEEE International Conference on Advanced Robotics and its Social Impacts. Austin: IEEE, 2017.
|
|
|
| [18] |
PENG L, HOU Z G, WANG W Q. Dynamic modeling and control of a parallel upper-limb rehabilitation robot [C]// IEEE/RAS-EMBS International Conference on Rehabilitation Robotics. Piscataway: IEEE, 2015: 532-537.
|
|
|
| [19] |
史小华, 王洪波, 孙利, 等 外骨骼型下肢康复机器人结构设计与动力学分析[J]. 机械工程学报, 2014, 50 (3): 41- 48
SHI Xiao-hua, WANG Hong-bo, SUN Li, et al Design and dynamic analysis of an exoskeletal lower limbs rehabilitation robot[J]. Journal of Mechanical Engineering, 2014, 50 (3): 41- 48
doi: 10.3901/JME.2014.03.041
|
|
|
| [20] |
张浩杰. 一种误差自适应的欠驱动康复训练机器人的研究[D]. 苏州: 苏州大学. 2019.
ZHANG Hao-jie. Research on an error adaptive under-actuated rehabilitation training robot [D]. Suzhou: Soochow University, 2019.
|
|
|
| [21] |
SCHMIDT H, HESSE S, BERNHARD R, et al HapticWalker: a novel haptic foot device[J]. ACM Transactions on Applied Perception, 2005, 2 (2): 166- 180
doi: 10.1145/1060581.1060589
|
|
|
| [22] |
MARIANNE S, CARMEN K, FRIEDEMANN M, et al Comparison of orthostatic reactions of patients still unconscious within the first three months of brain injury on a tilt table with and without integrated stepping[J]. Clinical Rehabilitation, 2008, 22: 1034- 1041
doi: 10.1177/0269215508092821
|
|
|
| [23] |
HIDLER J, WISMAN W, NECKEL N Kinematic trajectories while walking within the lokomat robotic gait-orthosis[J]. Clinical Biomechanics, 2008, 23 (10): 1251- 1259
doi: 10.1016/j.clinbiomech.2008.08.004
|
|
|
| [24] |
张浩杰, 李伟达, 李娟, 等 一种个体自适应康复训练机器人机构的研究[J]. 机械与电子, 2019, 37 (3): 72- 75
ZHANG Hao-jie, LI Wei-da, LI Juan, et al Research on an individual adaptive rehabilitation training robot mechanism[J]. Machinery and Electronics, 2019, 37 (3): 72- 75
doi: 10.3969/j.issn.1001-2257.2019.03.017
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|