| 智能机器人 |
|

|
|
|
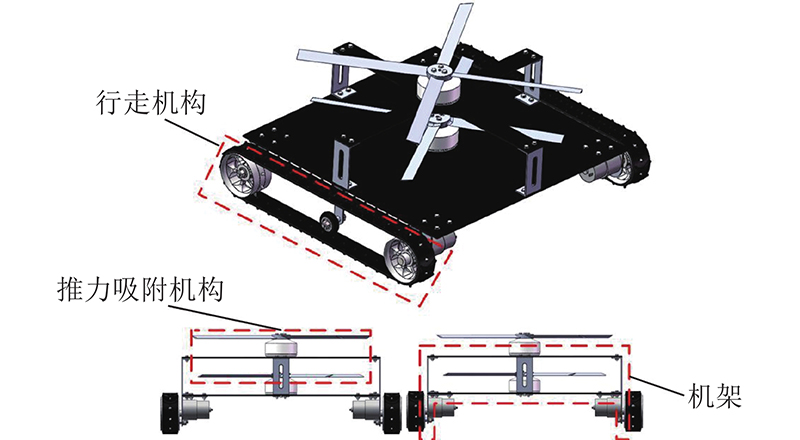
| 推力吸附爬壁机器人的优化设计与试验 |
薛朝军1( ),王海波1,2,*(),陈俞鹏1 ),王海波1,2,*(),陈俞鹏1 |
1. 西南交通大学 机械工程学院,四川 成都 610031
2. 轨道交通运维技术与装备四川省重点实验室,四川 成都 610031 |
|
| Optimal design and experimental study of thrust adsorption wall-climbing robot |
| Chao-jun XUE1(),Hai-bo WANG1,2,*(),Yu-peng CHEN1 |
1. School of Mechanical Engineering, Southwest Jiaotong University, Chengdu 610031, China
2. Technology and Equipment of Rail Transit Operation and Maintenance Key Laboratory of Sichuan Province, Chengdu 610031, China |
引用本文:
薛朝军,王海波,陈俞鹏. 推力吸附爬壁机器人的优化设计与试验[J]. 浙江大学学报(工学版), 2022, 56(6): 1181-1190, 1198.
Chao-jun XUE,Hai-bo WANG,Yu-peng CHEN. Optimal design and experimental study of thrust adsorption wall-climbing robot. Journal of ZheJiang University (Engineering Science), 2022, 56(6): 1181-1190, 1198.
链接本文:
https://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2022.06.016
或
https://www.zjujournals.com/eng/CN/Y2022/V56/I6/1181
|
| 1 |
董雅芸 我国桥梁安全与健康检测监测新技术的发展与应用: 访在役长大桥梁安全与健康国家重点实验室主任张宇峰[J]. 现代交通技术, 2020, 17 (6): 1- 6
DONG Ya-yun Development and application of new inspection and monitoring technology for bridge safety and health in China: interview with Zhang Yufeng, director of the state key laboratory of safety and health for in-service long span bridge[J]. Modern Transportation Technology, 2020, 17 (6): 1- 6
doi: 10.3969/j.issn.1672-9889.2020.06.001
|
| 2 |
刘洋. 基于结构计算与海量样本数据统计的桥梁预警指标方法研究[D]. 合肥: 安徽建筑大学, 2020: 1.
LIU Yang. Research on bridge early warning index method based on structural calculation and massive sample data statistics [D]. Hefei: Anhui Jianzhu University, 2020: 1.
|
| 3 |
SUKVICHAI K, MAOLANON P, SONGKRASIN K. Design of a double-propellers wall-climbing robot [C]// 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau: IEEE, 2017: 239-245.
|
| 4 |
Disney makes carbon fiber wall-climbing robot [J]. Reinforced Plastics, 2016, 60(2) : 75.
|
| 5 |
ADARSH R S, DHARMANA M M Multi-terrain multi-utility robot[J]. Procedia Computer Science, 2018, 133: 651- 659
doi: 10.1016/j.procs.2018.07.100
|
| 6 |
LIANG P, GAO X S, ZHANG Q F, et al Design and stability analysis of a wall-climbing robot using propulsive force of propeller[J]. Symmetry, 2020, 13 (1): 37
doi: 10.3390/sym13010037
|
| 7 |
ALKALLA M G, FANNI M A, MOHAMED A F, et al Tele-operated propeller-type climbing robot for inspection of petrochemical vessels[J]. Industrial Robot: An International Journal, 2017, 44 (2): 166- 177
doi: 10.1108/IR-07-2016-0182
|
| 8 |
ALKALLA M G, FANNI M A, MOHAMED A F, et al EJBot-II: an optimized skid-steering propeller-type climbing robot with transition mechanism[J]. Advanced Robotics, 2019, 33 (20): 1042- 1059
doi: 10.1080/01691864.2019.1657948
|
| 9 |
曾伟, 林永峰, 黄水林, 等 共轴刚性旋翼非定常气动特性初步试验研究[J]. 直升机技术, 2017, (1): 13- 17
ZENG Wei, LIN Yong-feng, HUANG Shui-lin, et al Preliminary experimental research on unsteady aerodynamic characteristics of coaxial rigid rotor[J]. Helicopter Hechnique, 2017, (1): 13- 17
doi: 10.3969/j.issn.1673-1220.2017.01.003
|
| 10 |
王适存. 直升机空气动力学[M]. 南京: [s. n.], 1985: 45.
|
| 11 |
王进, 王向坤, 扶建辉, 等 重载机器人横梁结构静动态特性分析与优化[J]. 浙江大学学报:工学版, 2021, 55 (1): 124- 134
WANG Jin, WANG Xiang-kun, FU Jian-hui, et al Static and dynamic characteristic analysis and structure optimization for crossbeam structure of heavy-duty truss robot[J]. Journal Of Zhejiang University: Engineering Science, 2021, 55 (1): 124- 134
|
| 12 |
ABDULLAH K, DAVID W C, ALICE E S Multi-objective optimization using genetic algorithms: a tutorial[J]. Reliability Engineering and System Safety, 2005, 91 (9): 992- 1007
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|