| 机械与能源工程 |
|


|
|
|
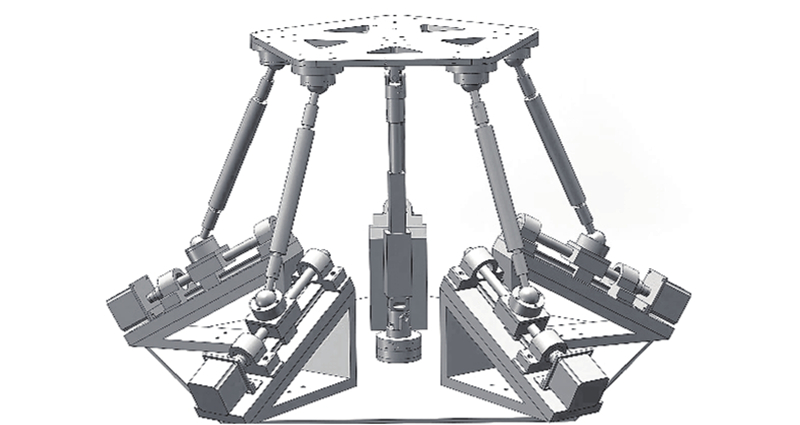
| 含球面副间隙的空间并联机构动态特性 |
李研彪( ),徐涛涛,郑航,王泽胜 ),徐涛涛,郑航,王泽胜 |
| 浙江工业大学 机械工程学院,浙江 杭州 310032 |
|
| Dynamic characteristics of spatial parallel mechanism with spherical joint clearance |
| Yan-biao LI(),Tao-tao XU,Hang ZHENG,Ze-sheng WANG |
| College of Mechanical Engineering, Zhejiang University of Technology, Hangzhou 310032, China |
引用本文:
李研彪,徐涛涛,郑航,王泽胜. 含球面副间隙的空间并联机构动态特性[J]. 浙江大学学报(工学版), 2020, 54(2): 348-356.
Yan-biao LI,Tao-tao XU,Hang ZHENG,Ze-sheng WANG. Dynamic characteristics of spatial parallel mechanism with spherical joint clearance. Journal of ZheJiang University (Engineering Science), 2020, 54(2): 348-356.
链接本文:
http://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2020.02.016
或
http://www.zjujournals.com/eng/CN/Y2020/V54/I2/348
|
| 1 |
HOU Y, HU X, ZENG D, et al Biomimetic shoulder complex based on 3-PSS/S spherical parallel mechanism[J]. Chinese Journal of Mechanical Engineering, 2015, 28 (1): 29- 37
doi: 10.3901/CJME.2014.0820.137
|
| 2 |
LI Y B, JIN Z L, JI S M, et al Design of mechanical coxa joints based on three-degree-of-freedom spherical parallel manipulators[J]. Journal of Mechanical Science and Technology, 2013, 27 (1): 103- 112
doi: 10.1007/s12206-012-1225-6
|
| 3 |
LI Y B, TAN D P, WEN D H, et al Parameters optimization of a novel 5-DOF gasbag polishing machine tool[J]. Chinese Journal of Mechanical Engineering, 2013, 26 (4): 680- 688
doi: 10.3901/CJME.2013.04.680
|
| 4 |
FLORES P, AMBROSIO J, CLAROJ C P, et al Dynamics of multibody systems with spherical clearance joints[J]. Journal of Computational and Nonlinear Dynamics, 2006, 1 (3): 240- 247
doi: 10.1115/1.2198877
|
| 5 |
TIAN Q, ZHANG Y Q, CHEN L P, et al Simulation of planar flexible multibody systems with clearance and lubricated revolute joints[J]. Nonlinear Dynamics, 2010, 60 (4): 489- 511
doi: 10.1007/s11071-009-9610-0
|
| 6 |
ERKAYA S, IBRAHIM U Experimental investigation of joint clearance effects on the dynamics of a slider-crank mechanism[J]. Multibody System Dynamics, 2010, 24 (1): 81- 102
doi: 10.1007/s11044-010-9192-0
|
| 7 |
ZHENG E, ZHU R, ZHU S, et al A study on dynamics of flexible multi-link mechanism including joints with clearance and lubrication for ultra-precision presses[J]. Nonlinear Dynamics, 2016, 83 (1/2): 137- 159
|
| 8 |
李豪杰, 张合, 李珂翔, 等 考 虑铰链间隙的水面并联稳定平台动力学分析[J]. 兵工学报, 2017, 38 (1): 129- 134
LI Hao-jie, ZHANG He, LI Ke-xiang, et al Dynamic analysis of offshore parallel stabilized platform in considering joint clearance[J]. Acta Armamentarii, 2017, 38 (1): 129- 134
doi: 10.3969/j.issn.1000-1093.2017.01.017
|
| 9 |
朱景原, 王见, 丁泽华, 等 含关节间隙的3-CPaRR并联机构的运动学和动力学分析 [J]. 振动与冲击, 2018, 37 (18): 9- 17
ZHU Jing-yuan, WANG Jian, DING Ze-hua, et al Kinematics and dynamics analysis of a 3-CPaRR parallel mechanism with joint clearance [J]. Journal of Vibration and Shock, 2018, 37 (18): 9- 17
|
| 10 |
ZHANG H D, ZHANG X M, ZHANG X C, et al Dynamic analysis of a 3-(P) under-barRR parallel mechanism by considering joint clearances[J]. Nonlinear Dynamics, 2017, 90 (1): 405- 423
doi: 10.1007/s11071-017-3672-1
|
| 11 |
VAREDI-KOULAEI S M, DANIALI H M, FARAJTABAR M, et al Reducing the undesirable effects of joints clearance on the behavior of the planar 3-RRR parallel manipulators[J]. Nonlinear Dynamics, 2016, 86 (2): 1007- 1022
doi: 10.1007/s11071-016-2942-7
|
| 12 |
侯雨雷, 汪毅, 李明洋, 等 一 种含间隙两转动一移动解耦并联机构混沌现象辨识[J]. 中国机械工程, 2015, 26 (13): 1759- 1766
HOU Yu-lei, WANG Yi, LI Ming-yang, et al Chaos identification of two rotational and one translational decoupled parallel mechanism concerning clearance[J]. China Mechanical Engineering, 2015, 26 (13): 1759- 1766
doi: 10.3969/j.issn.1004-132X.2015.13.010
|
| 13 |
王庚祥, 刘宏昭 考虑球面副间隙的4-SPS/CU并联机构动力学分析[J]. 机械工程学报, 2015, 51 (1): 43- 51
WANG Geng-xiang, LIU Hong-zhao Dynamics analysis of 4-SPS/CU parallel mechanism with spherical joint clearance[J]. Journal of Mechanical Engineering, 2015, 51 (1): 43- 51
doi: 10.3901/JME.2015.01.043
|
| 14 |
王庚祥, 刘宏昭, 邓培生 考 虑球面副间隙的并联机构动力学模型[J]. 振动与冲击, 2014, 33 (10): 43- 49
WANG Geng-xiang, LIU Hong-zhao, DENG Pei-seng Dynamics modeling for a parallel mechanism considering spherical joint clearance[J]. Journal of Vibration and Shock, 2014, 33 (10): 43- 49
|
| 15 |
陈修龙, 高文花, 宋浩, 等 含 球面副间隙的空间并联机构动力学特性分析[J]. 计算机集成制造系统, 2018, 24 (3): 660- 670
CHEN Xiu-long, GAO Wen-hua, SONG Hao, et al Dynamic characteristic analysis of spatial parallel mechanism with spherical clearance[J]. Computer Integrated Manufacturing Systems, 2018, 24 (3): 660- 670
|
| 16 |
CHEN X L, GAO W H, DENG Y, et al Chaotic characteristic analysis of spatial parallel mechanism with clearance in spherical joint[J]. Nonlinear Dynamics, 2018, 94 (4): 2625- 2642
doi: 10.1007/s11071-018-4513-6
|
| 17 |
CHEN X L, JIA Y H, DENG Y, et al Dynamics behavior analysis of parallel mechanism with joint clearance and flexible links[J]. Shock and Vibration, 2018, (6): 1- 17
|
| 18 |
MACHADO M, MOREIRA P, FLORES P, et al Compliant contact force models in multibody dynamics: evolution of the Hertz contact theory[J]. Mechanism and Machine Theory, 2012, 53: 99- 121
doi: 10.1016/j.mechmachtheory.2012.02.010
|
| 19 |
FLORES P, AMBROSIO J, CLARO J C P, et al Influence of the contact-impact force model on the dynamic response of multi-body systems[J]. Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-body Dynamics, 2006, 220 (1): 21- 34
doi: 10.1243/146441906X77722
|
| 20 |
AMBROSIO J. Impact of rigid and flexible multibody systems: deformation description and contact models [C]// NATO Advanced Study Institute on Virtual Nonlinear Multibody Systems. Prague: NATO ASI, 2002: 15-33.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|