[1]
王成军, 李帅 软体机器人研究现状
[J]. 微纳电子技术 , 2019 , 56 (12 ): 948 - 955
[本文引用: 1]
WANG Cheng-jun, LI Shuai Research status of soft robots
[J]. Micronanoelectronic Technology , 2019 , 56 (12 ): 948 - 955
[本文引用: 1]
[2]
MARTINEZ R V, FISH C R, CHEN X, et al Elastomeric origami: programmable paper: elastomer composites as pneumatic actuators
[J]. Advanced Functional Materials , 2012 , 22 (7 ): 1376 - 1384
DOI:10.1002/adfm.201102978
[本文引用: 1]
[3]
TRIVEDI D, RAHN C D, KIER W M, et al Soft robotics: biological inspiration, state of the art, and future research
[J]. Applied Bionics and Biomechanics , 2008 , 5 (3 ): 99 - 117
DOI:10.1155/2008/520417
[本文引用: 1]
[4]
BAER J I. Material handling apparatus and the like: US3343864 [P]. 1967–09–26.
[本文引用: 1]
[5]
ROY L O, KENT O. Gripping device: US3601442 [P]. 1971–08-24.
[6]
SUZUMORI K, ⅡKURA S, TANAKA H. Development of flexible microactuator and its applications to robotic mechanisms [C]// 1991 IEEE International Conference on Robotics and Automation . California: IEEE, 1991: 1622-1627.
[7]
KOHICHI S. Gripping actuator with independently flexible cylinders: US5156081 [P]. 1992–10-20.
[本文引用: 1]
[8]
YAMAGUCHI A, TAKEMURA K, YOKOTA S, et al A robot hand using electro-conjugate fluid: grasping experiment with balloon actuators inducing a palm motion of robot hand
[J]. Sensors and Actuators A: Physical , 2012 , 174 : 181 - 188
DOI:10.1016/j.sna.2011.11.036
[本文引用: 1]
[9]
NⅡYAMA R, SUN X, SUNG C, et al Pouch motors: printable soft actuators integrated with computational design
[J]. Soft Robotics , 2015 , 2 (2 ): 59 - 70
DOI:10.1089/soro.2014.0023
[本文引用: 1]
[10]
DEIMEL R, BROCK O. A compliant hand based on a novel pneumatic actuator [C]// IEEE International Conference on Robotics and Automation . Karlsruhe: IEEE, 2013: 2047-2053.
[本文引用: 1]
[11]
ZHANG N, GE L, XU H, et al 3D printed, modularized rigid-flexible integrated soft finger actuators for anthropomorphic hands
[J]. Sensors and Actuators A: Physical , 2020 , 312 : 1 - 9
[本文引用: 1]
[12]
DEIMEL R, BROCK O A novel type of compliant and underactuated robotic hand for dexterous grasping
[J]. International Journal of Robotics Research , 2016 , 35 (1–3 ): 161 - 185
DOI:10.1177/0278364915592961
[本文引用: 1]
[13]
SHEPHERD R F, ILIEVSKI F, CHOI W, et al Multigait soft robot
[J]. Proceedings of the National Academy of Sciences , 2011 , 108 (51 ): 20400 - 20403
DOI:10.1073/pnas.1116564108
[本文引用: 3]
[14]
ISHIDA M, DROTMAN D, SHIH B, et al Morphing structure for changing hydrodynamic characteristics of a soft underwater walking robot
[J]. IEEE Robotics and Automation Letters , 2019 , 4 (4 ): 4163 - 4169
DOI:10.1109/LRA.2019.2931263
[本文引用: 2]
[15]
TAKUYA U, MASAHIRO S, YOSHIHIRO K Caterpillar-inspired crawling robot using both compression and bending deformations
[J]. IEEE Robotics and Automation Letters , 2019 , 4 (2 ): 670 - 676
[本文引用: 2]
[16]
GU G, ZOU J, ZHAO R, et al Soft wall-climbing robots
[J]. Science Robotics , 2018 , 3 (25 ): 1 - 12
[本文引用: 3]
[17]
SINGH G, KRISHNAN G Designing fiber-reinforced soft actuators for planar curvilinear shape matching
[J]. Soft Robotics , 2020 , 7 (1 ): 109 - 121
DOI:10.1089/soro.2018.0169
[18]
LIAO B, ZANG H, CHEN M, et al Soft rod-climbing robot inspired by winding locomotion of snake
[J]. Soft Robotics , 2020 , 7 (4 ): 500 - 511
DOI:10.1089/soro.2019.0070
[本文引用: 1]
[19]
LIN H, LEISK G G, TRIMMER B GoQBot: a caterpillar-inspired soft-bodied rolling robot
[J]. Bioinspiration and Biomimetics , 2011 , 6 (2 ): 26007
DOI:10.1088/1748-3182/6/2/026007
[本文引用: 1]
[20]
TANG Y, CHI Y, SUN J, et al Leveraging elastic instabilities for amplified performance: spine-inspired high-speed and high-force soft robots
[J]. Science Advances , 2020 , 6 (19 ): z6912
DOI:10.1126/sciadv.aaz6912
[本文引用: 2]
[21]
XIE Z, DOMEL A G, AN N, et al Octopus arm-inspired tapered soft actuators with suckers for improved grasping
[J]. Soft Robotics , 2020 , 7 (5 ): 639 - 648
DOI:10.1089/soro.2019.0082
[本文引用: 2]
[22]
SHEN Z, ZHONG H, XU E, et al An underwater robotic manipulator with soft bladders and compact depth-independent actuation
[J]. Soft Robotics , 2020 , 7 (5 ): 535 - 549
DOI:10.1089/soro.2019.0087
[本文引用: 1]
[23]
TOLLEY M T, SHEPHERD R F, MOSADEGH B, et al A resilient, untethered soft robot
[J]. Soft Robotics , 2014 , 1 (3 ): 213 - 223
DOI:10.1089/soro.2014.0008
[本文引用: 4]
[24]
MORIN S A, SHEPHERD R F, KWOK S W, et al Camouflage and display for soft machines
[J]. Science , 2012 , 337 (6096 ): 828 - 832
DOI:10.1126/science.1222149
[本文引用: 2]
[25]
KATZSCHMANN R K, DELPRETO J, MACCURDY R, et al Exploration of underwater life with an acoustically controlled soft robotic fish
[J]. Science Robotics , 2018 , 3 (16 ): eaar3449
DOI:10.1126/scirobotics.aar3449
[本文引用: 7]
[26]
MARCHESE A D, ONAL C D, RUS D Autonomous soft robotic fish capable of escape maneuvers using fluidic elastomer actuators
[J]. Soft Robotics , 2014 , 1 (1 ): 75 - 87
DOI:10.1089/soro.2013.0009
[本文引用: 1]
[27]
KATZSCHMANN R K, MARCHESE A D, RUS D. Hydraulic autonomous soft robotic fish for 3D swimming [C]// International Symposium on Experimental Robotics . Tokyo: ISER, 2016: 405-420.
[本文引用: 1]
[28]
PATTERSON Z J, SABELHAUS A P, CHIN K, et al. An untethered brittle star robot for closed-loop underwater locomotion [EB/OL]. [2020–3–30]. https://arxiv.org/abs/2003.13529v1.
[本文引用: 4]
[29]
张忠强, 邹娇, 丁建宁, 等 软体机器人驱动研究现状
[J]. 机器人 , 2018 , 40 (5 ): 648 - 659
[本文引用: 1]
ZHANG Zhong-qiang, ZOU Jiao, DING Jian-ning, et al Research status of the soft robot driving
[J]. Robot , 2018 , 40 (5 ): 648 - 659
[本文引用: 1]
[31]
BENJAMIN G, DOMINIEK R, SATOSHI K , et al Elastic inflatable actuators for soft robotic applications
[J]. Advanced Materials , 2017 , 29 (43 ): 1604977
[本文引用: 1]
[32]
ONAL C D, RUS D Autonomous undulatory serpentine locomotion utilizing body dynamics of a fluidic soft robot
[J]. Bioinspiration and Biomimetics , 2013 , 8 (2 ): 26003
DOI:10.1088/1748-3182/8/2/026003
[本文引用: 4]
[33]
WAYNELOVICH J, FREY T, BALJON A, et al Versatile and dexterous soft robotic leg system for untethered operations
[J]. Soft Robotics , 2016 , 3 (2 ): 64 - 70
DOI:10.1089/soro.2016.0001
[本文引用: 4]
[35]
FAN J, WANG S, YU Q, et al Swimming performance of the frog-inspired soft robot
[J]. Soft Robotics , 2020 , 7 (5 ): 615 - 626
DOI:10.1089/soro.2019.0094
[本文引用: 6]
[36]
HOU T G, YANG X B, WANG T M, et al Locomotor transition: how squid jet from water to air
[J]. Bioinspiration and Biomimetics , 2020 , 15 (3 ): 36014
DOI:10.1088/1748-3190/ab784b
[本文引用: 3]
[37]
HOU T, YANG X, SU H, et al. Design, fabrication and morphing mechanism of soft fins and arms of a squid-like aquatic-aerial vehicle with morphology trade off [C]// International Conference on Robotics and Biomimetics . Dali: IEEE, 2019: 1020-1026.
[本文引用: 2]
[38]
李海利, 姚建涛, 周盼, 等 无系留大负载软体抓持机器人研究发展综述
[J]. 机械工程学报 , 2020 , 56 (19 ): 28 - 42
DOI:10.3901/JME.2020.19.028
[本文引用: 1]
LI Hai-li, YAO Jian-tao, ZHOU Pan, et al Untethered, high-load soft gripping robots: a review
[J]. Journal of Mechanical Engineering , 2020 , 56 (19 ): 28 - 42
DOI:10.3901/JME.2020.19.028
[本文引用: 1]
[39]
THOMAS M, ERIC M, CATHERINE E, et al 3D printed self-adhesive PEGDA-PAA hydrogels as modular components for soft actuators and microfluidics
[J]. Polymer Chemistry , 2019 , 10 (16 ): 2015 - 2028
DOI:10.1039/C9PY00211A
[本文引用: 1]
[40]
CANGIALOSI A, YOON C K, LIU J, et al DNA sequence-directed shape change of photopatterned hydro gels via high-degree swelling
[J]. Science , 2017 , 357 (6356 ): 1126 - 1130
DOI:10.1126/science.aan3925
[本文引用: 1]
[41]
ZHAO J W, ZHANG J M, DAVID M, et al Soft and fast hopping-running robot with speed of six times its body length per second
[J]. Soft Robotics , 2019 , 6 (6 ): 713 - 721
DOI:10.1089/soro.2018.0098
[本文引用: 1]
[42]
李铁风, 李国瑞, 梁艺鸣, 等 软体机器人结构机理与驱动材料研究综述
[J]. 力学学报 , 2016 , 48 (4 ): 756 - 766
DOI:10.6052/0459-1879-16-159
[本文引用: 1]
LI Tie-feng, LI Guo-rui, LIANG Yi-ming, et al Rebiew of materials and structures in soft robotics
[J]. Chinese Journal of Theoretical and Applied Mechanics , 2016 , 48 (4 ): 756 - 766
DOI:10.6052/0459-1879-16-159
[本文引用: 1]
[43]
WANG Z, WANG Y, LI J, et al. A micro biomimetic manta ray robot fish actuated by SMA [C]// International Conference on Robotics and Biomimetics . Guilin: IEEE, 2009: 1809-1813.
[本文引用: 4]
[44]
LOW K H, YANG J, PATTATHIL A P, et al. Initial prototype design and investigation of an undulating body by SMA [C]// International Conference on Automation Science and Engineering . Shanghai: IEEE, 2006: 472-477.
[本文引用: 3]
[45]
AURELI M, KOPMAN V, PORFIRI M Free-locomotion of underwater vehicles actuated by ionic polymer metal composites
[J]. IEEE/ASME Transactions on Mechatronics , 2010 , 15 (4 ): 603 - 614
DOI:10.1109/TMECH.2009.2030887
[本文引用: 3]
[46]
KAMAMICHI N, YAMAKITA M, ASAKA K, et al. A snake-like swimming robot using IPMC actuator/sensor [C]// International Conference on Robotics and Automation . Orlando: IEEE, 2006: 1812-1817.
[本文引用: 1]
[47]
CHEN Z, UM T I, BART-SMITH H. Ionic polymer-metal composite enabled robotic manta ray [C]// Proceedings of Spie the International Society for Optical Engineering . San Diego: IEEE, 2011: 1-12.
[本文引用: 2]
[48]
CHEN Z, UM T I, ZHU J, et al. Bio-inspired robotic cownose ray propelled by electroactive polymer pectoral fin [C]// International Mechanical Engineering Congress and Exposition . Denver: ASME, 2011: 1-8.
[本文引用: 2]
[49]
ONAL C D, CHEN X, WHITESIDES G M, et al. Soft mobile robots with on-board chemical Pressure generation [C]// Robotics Research: The 15th International Symposium ISRR . Flagstaff: Springer, 2017: 525-540.
[本文引用: 6]
[50]
BARTLETT N W, TOLLEY M T, OVERVELDE J T, et al A 3D-printed, functionally graded soft robot powered by combustion
[J]. Science , 2015 , 349 (6244 ): 161 - 165
DOI:10.1126/science.aab0129
[本文引用: 4]
[51]
SHEPHERD R F, STOKES A A, FREAKE J, et al Using explosions to power a soft robot
[J]. Angewandte Chemie-International Edition , 2013 , 52 (10 ): 2892 - 2896
DOI:10.1002/anie.201209540
[本文引用: 1]
[52]
WEHNER M, TRUBY R L, FITZGERALD D J, et al An integrated design and fabrication strategy for entirely soft, autonomous robots
[J]. Nature , 2016 , 536 (7617 ): 451 - 455
DOI:10.1038/nature19100
[本文引用: 5]
[53]
AUBIN C A, CHOUDHURY S, JERCH R, et al Electrolytic vascular systems for energy-dense robots
[J]. Nature , 2019 , 571 (7763 ): 51 - 57
DOI:10.1038/s41586-019-1313-1
[本文引用: 3]
[54]
LOEPFE M, SCHUMACHER C M, LUSTENBERGER U B, et al An untethered, jumping roly-poly soft robot driven by combustion
[J]. Soft Robotics , 2015 , 2 (1 ): 33 - 41
DOI:10.1089/soro.2014.0021
[本文引用: 4]
[55]
MICHAEL T T, ROBERT F S, MICHAEL K, et al. An untethered jumping soft robot [C]// International Conference on Intelligent Robots and Systems . Chicago: IEEE, 2014: 564-566.
[本文引用: 1]
[56]
孙沂琳, 张秋菊, 陈宵燕 软体驱动器研究综述
[J]. 机械设计 , 2019 , 36 (2 ): 5 - 18
[本文引用: 1]
SUN Yi-lin, ZHANG Qiu-ju, CHEN Xiao-yan Overview of soft-bodied actuators
[J]. Journal of Machine Design , 2019 , 36 (2 ): 5 - 18
[本文引用: 1]
[57]
YUK H, LIN S, MA C, et al Hydraulic hydrogel actuators and robots optically and sonically camouflaged in water
[J]. Nature Communications , 2017 , 8 (1 ): 1 - 12
DOI:10.1038/s41467-016-0009-6
[本文引用: 1]
[58]
ACOME E, MITCHELL S K, MORRISSEY T G, et al Hydraulically amplified self-healing electrostatic actuators with muscle-like performance
[J]. Science , 2018 , 359 (6371 ): 61 - 65
DOI:10.1126/science.aao6139
[本文引用: 1]
[59]
李海, 观姗姗, 赵树高 介电弹性体智能材料的研究进展
[J]. 特种橡胶制品 , 2016 , 37 (2 ): 66 - 72
[本文引用: 1]
LI Hai, GUAN Shan-shan, ZHAO Shu-gao Research progress of dielectric elastomer smart materials
[J]. Special Purpose Rubber Products , 2016 , 37 (2 ): 66 - 72
[本文引用: 1]
[60]
PEELE B, WALLIN T, ZHAO H, et al 3D printing antagonistic systems of artificial muscle using projection stereolithography
[J]. Bioinspiration and Biomimetics , 2015 , 10 (5 ): 55003
DOI:10.1088/1748-3190/10/5/055003
[本文引用: 1]
[61]
MCMAHAN W, CHITRAKARAN V, CSENCSITS M, et al. Field trials and testing of the OctArm continuum manipulator [C]// International Conference on Robotics and Automation . Orlando: IEEE, 2006.
[本文引用: 1]
[62]
FEI Y, WANG J, PANG W A novel fabric-based versatile and stiffness-tunable soft gripper integrating soft pneumatic fingers and wrist
[J]. Soft Robotics , 2019 , 6 (1 ): 1 - 20
DOI:10.1089/soro.2018.0015
[本文引用: 1]
[63]
GALLOWAY K, BECKER K, PHILLIPS B, et al Soft robotic grippers for biological sampling on deep reefs
[J]. Soft Robotics , 2016 , 3 (1 ): 23 - 33
DOI:10.1089/soro.2015.0019
[本文引用: 1]
[64]
GALLOWAY K, POLYGERINOS P, WALSH C, et al. Mechanically programmable bend radius for fiber-reinforced soft actuators [C]// International Conference on Advanced Robotics . Montevideo: IEEE, 2013: 1-6.
[65]
POLYGERINOS P, WANG Z, OVERVELDE J T B, et al Modeling of soft fiber-reinforced bending actuators
[J]. IEEE Transactions on Robotics , 2015 , 31 (3 ): 778 - 789
DOI:10.1109/TRO.2015.2428504
[本文引用: 1]
[66]
PAEZ L, AGARWAL G, PAIK J Design and analysis of a soft pneumatic actuator with origami shell reinforcement
[J]. Soft Robotics , 2016 , 3 (3 ): 109 - 119
DOI:10.1089/soro.2016.0023
[本文引用: 1]
[67]
QIN L, LIANG X, HUANG H, et al A versatile soft crawling robot with rapid locomotion
[J]. Soft Robotics , 2019 , 6 (4 ): 455 - 467
DOI:10.1089/soro.2018.0124
[本文引用: 1]
[68]
FENG H, SUN Y, TODD P A, et al Body wave generation for anguilliform locomotion using a fiber-reinforced soft fluidic elastomer actuator array toward the development of the eel-inspired underwater soft robot
[J]. Soft Robotics , 2020 , 7 (2 ): 233 - 250
DOI:10.1089/soro.2019.0054
[本文引用: 3]
[69]
HUANG X, KUMAR K, JAWED M K, et al Chasing biomimetic locomotion speeds: creating untethered soft robots with shape memory alloy actuators
[J]. Science Robotics , 2018 , 3 (25 ): 1 - 3
[本文引用: 2]
[70]
LI T, LI G, LIANG Y, et al Fast-moving soft electronic fish
[J]. Science Advance , 2017 , 3 (4 ): e1602045
[本文引用: 3]
[71]
SEOK S, ONAL C D, CHO K, et al Meshworm: a peristaltic soft robot with antagonistic nickel titanium coil actuators
[J]. IEEE/ASME Transactions on Mechatronics , 2013 , 18 (5 ): 1485 - 1497
DOI:10.1109/TMECH.2012.2204070
[本文引用: 1]
[72]
YANG T, XIAO Y H, ZHANG Z, et al A soft artificial muscle driven robot with reinforcement learning
[J]. Scientific Reports , 2018 , 8 (1 ): 14518
DOI:10.1038/s41598-018-32757-9
[本文引用: 2]
[73]
王海涛, 彭熙凤, 林本末 软体机器人研究进展
[J]. 华南理工大学学报:自然科学版 , 2020 , 48 (2 ): 94 - 106
[本文引用: 1]
Wang Hai-tao, Peng Xi-feng, LIN Ben-mo Research development of soft robots
[J]. Journal of South China University of Technology: Natural Science Edition , 2020 , 48 (2 ): 94 - 106
[本文引用: 1]
[74]
SIFERT E, REYSSAT E, BICO J, et al Bio-inspired pneumatic shape-morphing elastomers
[J]. Nature Materials , 2019 , 18 (1 ): 24 - 28
DOI:10.1038/s41563-018-0219-x
[本文引用: 1]
[75]
SHAHID Z, GLATMAN A L, RYU S C Design of a soft composite finger with adjustable joint stiffness
[J]. Soft Robotics , 2019 , 6 (6 ): 722 - 732
DOI:10.1089/soro.2018.0148
[本文引用: 1]
[76]
RANZANI T, RUSSO S, BARTLETT N W, et al Increasing the dimensionality of soft microstructures through injection-induced self-folding
[J]. Advanced Materials , 2018 , 30 (38 ): 1802739
DOI:10.1002/adma.201802739
[本文引用: 4]
[77]
MARCHESE A D, KATZSCHMANN R K, RUS D A recipe for soft fluidic elastomer robots
[J]. Soft Robotics , 2015 , 2 (1 ): 7 - 25
DOI:10.1089/soro.2014.0022
[本文引用: 2]
[79]
CHEN W, XIONG C, LIU C, et al Fabrication and dynamic modeling of bidirectional bending soft actuator integrated with optical waveguide curvature sensor
[J]. Soft Robotics , 2019 , 6 (4 ): 495 - 506
DOI:10.1089/soro.2018.0061
[本文引用: 1]
[80]
YAP H K, NG H Y, YEOW C High-force soft printable pneumatics for soft robotic applications
[J]. Soft Robotics , 2016 , 3 (3 ): 144 - 158
DOI:10.1089/soro.2016.0030
[本文引用: 1]
[81]
KONISHI S. Small, soft, safe micromachine for minimally invasive surgery [C]// International Meeting for Future of Electron Devices . Osaka: IEEE, 2011: 20-21.
[本文引用: 2]
[82]
ZHANG B, FAN Y, YANG P, et al Worm-like soft robot for complicated tubular environments
[J]. Soft Robotics , 2019 , 6 (3 ): 399 - 413
DOI:10.1089/soro.2018.0088
[本文引用: 2]
[83]
DOLLAR A M, HOWE R D A robust compliant grasper via shape deposition manufacturing
[J]. IEEE/ASME Transactions on Mechatronics , 2006 , 11 (2 ): 154 - 161
DOI:10.1109/TMECH.2006.871090
[本文引用: 1]
[84]
CHAM J G, BAILEY S A, CLARK J E, et al Fast and robust: hexapedal robots via shape deposition manufacturing
[J]. The International Journal of Robotics Research , 2002 , 21 (10 ): 869 - 882
DOI:10.1177/0278364902021010837
[本文引用: 1]
[85]
BAILEY S A, CHAM J G, CUTKOSKY M R, et al. Biomimetic robotic mechanisms via shape deposition manufacturing [C]// The 9th International Symposium of Robotics Research . SNOWBIRD: IEEE, 1999: 1-7.
[本文引用: 1]
[86]
MAJIDI C Soft robotics: a perspective: current trends and prospects for the future
[J]. Soft Robotics , 2014 , 1 (1 ): 5 - 11
DOI:10.1089/soro.2013.0001
[本文引用: 1]
[87]
CHU W, LEE K, SONG S, et al Review of biomimetic underwater robots using smart actuators
[J]. International Journal of Precision Engineering and Manufacturing , 2012 , 13 (7 ): 1281 - 1292
DOI:10.1007/s12541-012-0171-7
[本文引用: 1]
[88]
YU J, WANG M, DONG H, et al Motion control and motion coordination of bionic robotic fish: a review
[J]. Journal of Bionic Engineering , 2018 , 15 (4 ): 579 - 598
DOI:10.1007/s42235-018-0048-2
[本文引用: 1]
[89]
RUS D, TOLLEY M T Design, fabrication and control of soft robots
[J]. Nature , 2015 , 521 (7553 ): 467 - 475
DOI:10.1038/nature14543
[本文引用: 1]
[90]
JUNGHWAN B, YOONTAEK L, JAEYOUNG Y, et al Electronic skins for soft, compact, reversible assembly of wirelessly activated fully soft robots
[J]. Science Robotics , 2018 , 3 (18 ): 9020
DOI:10.1126/scirobotics.aas9020
[本文引用: 1]
[91]
PEDRO P, SYDNEY S, MATEI C Data-driven super-resolution on a tactile dome
[J]. IEEE Robotics and Automation Letters , 2018 , 3 (3 ): 1434 - 1441
DOI:10.1109/LRA.2018.2800081
[本文引用: 1]
[92]
CHRIS L, JOSEF S, ROSS K, et al A deformable interface for human touch recognition using stretchable carbon nanotube dielectric elastomer sensors and deep neural networks
[J]. Soft Robotics , 2019 , 6 (5 ): 611 - 620
DOI:10.1089/soro.2018.0086
[本文引用: 1]
[93]
SUBRAMANIAN S, PETR K, Li U Z, et al Learning the signatures of the human grasp using a scalable tactile glove
[J]. Nature , 2019 , 569 (7758 ): 698 - 702
DOI:10.1038/s41586-019-1234-z
[本文引用: 1]
[94]
徐丰羽, 孟凡昌, 范保杰, 等 软体机器人驱动、建模与应用研究综述
[J]. 南京邮电大学学报:自然科学版 , 2019 , 39 (3 ): 64 - 75
[本文引用: 1]
XU Feng-yu, MENG Fan-chang, FAN Bao-jie, et al Review of driving methods, modeling and application in soft robots
[J]. Journal of Nanjing University of Posts and Telecommunications: Natural Science , 2019 , 39 (3 ): 64 - 75
[本文引用: 1]
[95]
WEBSTER R J, JONES B A Design and kinematic modeling of constant curvature continuum robots: a review
[J]. The International Journal of Robotics Research , 2010 , 29 (13 ): 1661 - 1683
DOI:10.1177/0278364910368147
[本文引用: 1]
[96]
BOSWORTH W, KIM S, HOGAN N. The MIT super mini cheetah: a small, low-cost quadrupedal Robot for dynamic locomotion [C]// International Symposium on Safety, Security, and Rescue Robotics . West Lafayette: IEEE, 2015: 1-8.
[本文引用: 1]
[97]
POLYGERINOS P, GALLOWAY K C, SANAN S, et al. EMG controlled soft robotic glove for assistance during activities of daily living [C]// International Conference on Rehabilitation Robotics . Singapore: IEEE, 2015: 55-60.
[本文引用: 1]
[98]
HAWKES E W, BLUMENSCHEIN L H, GREER J D, et al A soft robot that navigates its environment through growth
[J]. Science Robotics , 2017 , 2 (8 ): eaan3028
DOI:10.1126/scirobotics.aan3028
[本文引用: 1]
[99]
POLYGERINOS P, GALLOWAY K C, SAVAGE E, et al. Soft robotic glove for hand rehabilitation and task specific training [C]// International Conference on Robotics and Automation . Seattle: IEEE, 2015: 2913-2919.
[本文引用: 1]
[100]
POLYGERINOS P, WANG Z, GALLOWAY K C, et al Soft robotic glove for combined assistance and at-home rehabilitation
[J]. Robotics and Autonomous Systems , 2015 , 73 : 135 - 143
DOI:10.1016/j.robot.2014.08.014
[101]
ZHAO H, JALVING J, HUANG R, et al A helping hand: soft orthosis with integrated optical strain sensors and emg control
[J]. IEEE Robotics and Automation Magazine , 2016 , 23 (3 ): 55 - 64
DOI:10.1109/MRA.2016.2582216
[本文引用: 1]
[102]
CHEN G, PHAM M T, REDARCE T Sensor-based guidance control of a continuum robot for a semi-autonomous colonoscopy
[J]. Robotics and Autonomous Systems , 2009 , 57 (6/7 ): 712 - 722
[本文引用: 1]
[103]
ROCHE E T, HORVATH M A, WAMALA I, et al Soft robotic sleeve supports heart function
[J]. Science Translational Medicine , 2017 , 9 (373 ): 3925
DOI:10.1126/scitranslmed.aaf3925
[本文引用: 1]
软体机器人研究现状
1
2019
... 长期以来,人们为了提高自身的活动能力,不断向自然界中的生物学习. 自然界中的软体生物能够利用身体的软组织和顺应性结构减少外界环境带来的负面作用,通过模仿这种柔软特性,人们研制出了软体机器人. 传统的刚性机器人输出速度快、力量大、精度高,但是无法通过尺寸小于自身尺寸或形状复杂的通道,复杂的结构、较差的适应性以及昂贵的传感材料使刚性机器人更适合应用在结构化环境中[1 ] . 与刚性机器人相比,软体机器人使用柔性或可伸展材料制造,能够执行连续自由度动作并在碰撞时吸收能量. 通过模仿自然界生物的行为方式,软体机器人在有较强人机交互能力的同时,能够在杂乱未知的环境行动自如[2 -3 ] . ...
软体机器人研究现状
1
2019
... 长期以来,人们为了提高自身的活动能力,不断向自然界中的生物学习. 自然界中的软体生物能够利用身体的软组织和顺应性结构减少外界环境带来的负面作用,通过模仿这种柔软特性,人们研制出了软体机器人. 传统的刚性机器人输出速度快、力量大、精度高,但是无法通过尺寸小于自身尺寸或形状复杂的通道,复杂的结构、较差的适应性以及昂贵的传感材料使刚性机器人更适合应用在结构化环境中[1 ] . 与刚性机器人相比,软体机器人使用柔性或可伸展材料制造,能够执行连续自由度动作并在碰撞时吸收能量. 通过模仿自然界生物的行为方式,软体机器人在有较强人机交互能力的同时,能够在杂乱未知的环境行动自如[2 -3 ] . ...
Elastomeric origami: programmable paper: elastomer composites as pneumatic actuators
1
2012
... 长期以来,人们为了提高自身的活动能力,不断向自然界中的生物学习. 自然界中的软体生物能够利用身体的软组织和顺应性结构减少外界环境带来的负面作用,通过模仿这种柔软特性,人们研制出了软体机器人. 传统的刚性机器人输出速度快、力量大、精度高,但是无法通过尺寸小于自身尺寸或形状复杂的通道,复杂的结构、较差的适应性以及昂贵的传感材料使刚性机器人更适合应用在结构化环境中[1 ] . 与刚性机器人相比,软体机器人使用柔性或可伸展材料制造,能够执行连续自由度动作并在碰撞时吸收能量. 通过模仿自然界生物的行为方式,软体机器人在有较强人机交互能力的同时,能够在杂乱未知的环境行动自如[2 -3 ] . ...
Soft robotics: biological inspiration, state of the art, and future research
1
2008
... 长期以来,人们为了提高自身的活动能力,不断向自然界中的生物学习. 自然界中的软体生物能够利用身体的软组织和顺应性结构减少外界环境带来的负面作用,通过模仿这种柔软特性,人们研制出了软体机器人. 传统的刚性机器人输出速度快、力量大、精度高,但是无法通过尺寸小于自身尺寸或形状复杂的通道,复杂的结构、较差的适应性以及昂贵的传感材料使刚性机器人更适合应用在结构化环境中[1 ] . 与刚性机器人相比,软体机器人使用柔性或可伸展材料制造,能够执行连续自由度动作并在碰撞时吸收能量. 通过模仿自然界生物的行为方式,软体机器人在有较强人机交互能力的同时,能够在杂乱未知的环境行动自如[2 -3 ] . ...
1
... 利用软材料的软弹性和安全性,研究人员最早设计了一系列软抓取器[4 -7 ] ,通过在每个软体执行器中设置空腔,利用气泵连接气管远程给空腔施加高压气体,在实现执行器弯曲、伸展动作的同时无伤抓取目标物. 在实现简单抓取功能后,研究人员进而模仿更加灵活的人手进行研究,设计了电共轭流体驱动软体手[8 ] 、平面打印手[9 ] 、RBO Hand[10 ] 、3D打印多关节仿生手[11 ] 等软体手. 人手能实现复杂的抓取和持握的姿态[12 ] ,模仿人手制作的软体手能够适配各种形状和表面性质,并兼具安全、轻量化和高灵活性的优点. 与此同时,一些软体机器人模仿自然生物的运动姿态而设计,能实现身体的高曲率弯曲和扭转,展现出对外界环境的适应性,例如:在崎岖地形爬行的机器人[13 -15 ] 、攀爬机器人[16 -18 ] 、仿毛虫激发反应的GoQbot[19 ] 、仿猎豹奔跑机器人[20 ] ,仿章鱼吸盘的圆锥状抓取器[21 ] 、液压驱动的水下机械手[22 ] 等. 但是这些软抓取器、软体手、软体机器人都需要缆线提供能量,在柔软灵活的执行系统后面由驱动系统提供电能或高压流体,而且常用的空气压缩机、电池、电路板和处理器有体积大、重量大、噪声大等弊端. 如图1 所示为1990年以来,软抓取器、软体仿生手、仿生运动软体机器人以及医用领域中有代表性的软体机器人. 可以看出,在2015年以后,一些软体机器人逐渐在结构上集成执行系统、驱动系统、传感和控制系统,从外观上看是取消了提供信号、电能和高压流体能量的缆绳,在本质上则是实现了集成化、智能化的设计. ...
1
... 利用软材料的软弹性和安全性,研究人员最早设计了一系列软抓取器[4 -7 ] ,通过在每个软体执行器中设置空腔,利用气泵连接气管远程给空腔施加高压气体,在实现执行器弯曲、伸展动作的同时无伤抓取目标物. 在实现简单抓取功能后,研究人员进而模仿更加灵活的人手进行研究,设计了电共轭流体驱动软体手[8 ] 、平面打印手[9 ] 、RBO Hand[10 ] 、3D打印多关节仿生手[11 ] 等软体手. 人手能实现复杂的抓取和持握的姿态[12 ] ,模仿人手制作的软体手能够适配各种形状和表面性质,并兼具安全、轻量化和高灵活性的优点. 与此同时,一些软体机器人模仿自然生物的运动姿态而设计,能实现身体的高曲率弯曲和扭转,展现出对外界环境的适应性,例如:在崎岖地形爬行的机器人[13 -15 ] 、攀爬机器人[16 -18 ] 、仿毛虫激发反应的GoQbot[19 ] 、仿猎豹奔跑机器人[20 ] ,仿章鱼吸盘的圆锥状抓取器[21 ] 、液压驱动的水下机械手[22 ] 等. 但是这些软抓取器、软体手、软体机器人都需要缆线提供能量,在柔软灵活的执行系统后面由驱动系统提供电能或高压流体,而且常用的空气压缩机、电池、电路板和处理器有体积大、重量大、噪声大等弊端. 如图1 所示为1990年以来,软抓取器、软体仿生手、仿生运动软体机器人以及医用领域中有代表性的软体机器人. 可以看出,在2015年以后,一些软体机器人逐渐在结构上集成执行系统、驱动系统、传感和控制系统,从外观上看是取消了提供信号、电能和高压流体能量的缆绳,在本质上则是实现了集成化、智能化的设计. ...
A robot hand using electro-conjugate fluid: grasping experiment with balloon actuators inducing a palm motion of robot hand
1
2012
... 利用软材料的软弹性和安全性,研究人员最早设计了一系列软抓取器[4 -7 ] ,通过在每个软体执行器中设置空腔,利用气泵连接气管远程给空腔施加高压气体,在实现执行器弯曲、伸展动作的同时无伤抓取目标物. 在实现简单抓取功能后,研究人员进而模仿更加灵活的人手进行研究,设计了电共轭流体驱动软体手[8 ] 、平面打印手[9 ] 、RBO Hand[10 ] 、3D打印多关节仿生手[11 ] 等软体手. 人手能实现复杂的抓取和持握的姿态[12 ] ,模仿人手制作的软体手能够适配各种形状和表面性质,并兼具安全、轻量化和高灵活性的优点. 与此同时,一些软体机器人模仿自然生物的运动姿态而设计,能实现身体的高曲率弯曲和扭转,展现出对外界环境的适应性,例如:在崎岖地形爬行的机器人[13 -15 ] 、攀爬机器人[16 -18 ] 、仿毛虫激发反应的GoQbot[19 ] 、仿猎豹奔跑机器人[20 ] ,仿章鱼吸盘的圆锥状抓取器[21 ] 、液压驱动的水下机械手[22 ] 等. 但是这些软抓取器、软体手、软体机器人都需要缆线提供能量,在柔软灵活的执行系统后面由驱动系统提供电能或高压流体,而且常用的空气压缩机、电池、电路板和处理器有体积大、重量大、噪声大等弊端. 如图1 所示为1990年以来,软抓取器、软体仿生手、仿生运动软体机器人以及医用领域中有代表性的软体机器人. 可以看出,在2015年以后,一些软体机器人逐渐在结构上集成执行系统、驱动系统、传感和控制系统,从外观上看是取消了提供信号、电能和高压流体能量的缆绳,在本质上则是实现了集成化、智能化的设计. ...
Pouch motors: printable soft actuators integrated with computational design
1
2015
... 利用软材料的软弹性和安全性,研究人员最早设计了一系列软抓取器[4 -7 ] ,通过在每个软体执行器中设置空腔,利用气泵连接气管远程给空腔施加高压气体,在实现执行器弯曲、伸展动作的同时无伤抓取目标物. 在实现简单抓取功能后,研究人员进而模仿更加灵活的人手进行研究,设计了电共轭流体驱动软体手[8 ] 、平面打印手[9 ] 、RBO Hand[10 ] 、3D打印多关节仿生手[11 ] 等软体手. 人手能实现复杂的抓取和持握的姿态[12 ] ,模仿人手制作的软体手能够适配各种形状和表面性质,并兼具安全、轻量化和高灵活性的优点. 与此同时,一些软体机器人模仿自然生物的运动姿态而设计,能实现身体的高曲率弯曲和扭转,展现出对外界环境的适应性,例如:在崎岖地形爬行的机器人[13 -15 ] 、攀爬机器人[16 -18 ] 、仿毛虫激发反应的GoQbot[19 ] 、仿猎豹奔跑机器人[20 ] ,仿章鱼吸盘的圆锥状抓取器[21 ] 、液压驱动的水下机械手[22 ] 等. 但是这些软抓取器、软体手、软体机器人都需要缆线提供能量,在柔软灵活的执行系统后面由驱动系统提供电能或高压流体,而且常用的空气压缩机、电池、电路板和处理器有体积大、重量大、噪声大等弊端. 如图1 所示为1990年以来,软抓取器、软体仿生手、仿生运动软体机器人以及医用领域中有代表性的软体机器人. 可以看出,在2015年以后,一些软体机器人逐渐在结构上集成执行系统、驱动系统、传感和控制系统,从外观上看是取消了提供信号、电能和高压流体能量的缆绳,在本质上则是实现了集成化、智能化的设计. ...
1
... 利用软材料的软弹性和安全性,研究人员最早设计了一系列软抓取器[4 -7 ] ,通过在每个软体执行器中设置空腔,利用气泵连接气管远程给空腔施加高压气体,在实现执行器弯曲、伸展动作的同时无伤抓取目标物. 在实现简单抓取功能后,研究人员进而模仿更加灵活的人手进行研究,设计了电共轭流体驱动软体手[8 ] 、平面打印手[9 ] 、RBO Hand[10 ] 、3D打印多关节仿生手[11 ] 等软体手. 人手能实现复杂的抓取和持握的姿态[12 ] ,模仿人手制作的软体手能够适配各种形状和表面性质,并兼具安全、轻量化和高灵活性的优点. 与此同时,一些软体机器人模仿自然生物的运动姿态而设计,能实现身体的高曲率弯曲和扭转,展现出对外界环境的适应性,例如:在崎岖地形爬行的机器人[13 -15 ] 、攀爬机器人[16 -18 ] 、仿毛虫激发反应的GoQbot[19 ] 、仿猎豹奔跑机器人[20 ] ,仿章鱼吸盘的圆锥状抓取器[21 ] 、液压驱动的水下机械手[22 ] 等. 但是这些软抓取器、软体手、软体机器人都需要缆线提供能量,在柔软灵活的执行系统后面由驱动系统提供电能或高压流体,而且常用的空气压缩机、电池、电路板和处理器有体积大、重量大、噪声大等弊端. 如图1 所示为1990年以来,软抓取器、软体仿生手、仿生运动软体机器人以及医用领域中有代表性的软体机器人. 可以看出,在2015年以后,一些软体机器人逐渐在结构上集成执行系统、驱动系统、传感和控制系统,从外观上看是取消了提供信号、电能和高压流体能量的缆绳,在本质上则是实现了集成化、智能化的设计. ...
3D printed, modularized rigid-flexible integrated soft finger actuators for anthropomorphic hands
1
2020
... 利用软材料的软弹性和安全性,研究人员最早设计了一系列软抓取器[4 -7 ] ,通过在每个软体执行器中设置空腔,利用气泵连接气管远程给空腔施加高压气体,在实现执行器弯曲、伸展动作的同时无伤抓取目标物. 在实现简单抓取功能后,研究人员进而模仿更加灵活的人手进行研究,设计了电共轭流体驱动软体手[8 ] 、平面打印手[9 ] 、RBO Hand[10 ] 、3D打印多关节仿生手[11 ] 等软体手. 人手能实现复杂的抓取和持握的姿态[12 ] ,模仿人手制作的软体手能够适配各种形状和表面性质,并兼具安全、轻量化和高灵活性的优点. 与此同时,一些软体机器人模仿自然生物的运动姿态而设计,能实现身体的高曲率弯曲和扭转,展现出对外界环境的适应性,例如:在崎岖地形爬行的机器人[13 -15 ] 、攀爬机器人[16 -18 ] 、仿毛虫激发反应的GoQbot[19 ] 、仿猎豹奔跑机器人[20 ] ,仿章鱼吸盘的圆锥状抓取器[21 ] 、液压驱动的水下机械手[22 ] 等. 但是这些软抓取器、软体手、软体机器人都需要缆线提供能量,在柔软灵活的执行系统后面由驱动系统提供电能或高压流体,而且常用的空气压缩机、电池、电路板和处理器有体积大、重量大、噪声大等弊端. 如图1 所示为1990年以来,软抓取器、软体仿生手、仿生运动软体机器人以及医用领域中有代表性的软体机器人. 可以看出,在2015年以后,一些软体机器人逐渐在结构上集成执行系统、驱动系统、传感和控制系统,从外观上看是取消了提供信号、电能和高压流体能量的缆绳,在本质上则是实现了集成化、智能化的设计. ...
A novel type of compliant and underactuated robotic hand for dexterous grasping
1
2016
... 利用软材料的软弹性和安全性,研究人员最早设计了一系列软抓取器[4 -7 ] ,通过在每个软体执行器中设置空腔,利用气泵连接气管远程给空腔施加高压气体,在实现执行器弯曲、伸展动作的同时无伤抓取目标物. 在实现简单抓取功能后,研究人员进而模仿更加灵活的人手进行研究,设计了电共轭流体驱动软体手[8 ] 、平面打印手[9 ] 、RBO Hand[10 ] 、3D打印多关节仿生手[11 ] 等软体手. 人手能实现复杂的抓取和持握的姿态[12 ] ,模仿人手制作的软体手能够适配各种形状和表面性质,并兼具安全、轻量化和高灵活性的优点. 与此同时,一些软体机器人模仿自然生物的运动姿态而设计,能实现身体的高曲率弯曲和扭转,展现出对外界环境的适应性,例如:在崎岖地形爬行的机器人[13 -15 ] 、攀爬机器人[16 -18 ] 、仿毛虫激发反应的GoQbot[19 ] 、仿猎豹奔跑机器人[20 ] ,仿章鱼吸盘的圆锥状抓取器[21 ] 、液压驱动的水下机械手[22 ] 等. 但是这些软抓取器、软体手、软体机器人都需要缆线提供能量,在柔软灵活的执行系统后面由驱动系统提供电能或高压流体,而且常用的空气压缩机、电池、电路板和处理器有体积大、重量大、噪声大等弊端. 如图1 所示为1990年以来,软抓取器、软体仿生手、仿生运动软体机器人以及医用领域中有代表性的软体机器人. 可以看出,在2015年以后,一些软体机器人逐渐在结构上集成执行系统、驱动系统、传感和控制系统,从外观上看是取消了提供信号、电能和高压流体能量的缆绳,在本质上则是实现了集成化、智能化的设计. ...
Multigait soft robot
3
2011
... 利用软材料的软弹性和安全性,研究人员最早设计了一系列软抓取器[4 -7 ] ,通过在每个软体执行器中设置空腔,利用气泵连接气管远程给空腔施加高压气体,在实现执行器弯曲、伸展动作的同时无伤抓取目标物. 在实现简单抓取功能后,研究人员进而模仿更加灵活的人手进行研究,设计了电共轭流体驱动软体手[8 ] 、平面打印手[9 ] 、RBO Hand[10 ] 、3D打印多关节仿生手[11 ] 等软体手. 人手能实现复杂的抓取和持握的姿态[12 ] ,模仿人手制作的软体手能够适配各种形状和表面性质,并兼具安全、轻量化和高灵活性的优点. 与此同时,一些软体机器人模仿自然生物的运动姿态而设计,能实现身体的高曲率弯曲和扭转,展现出对外界环境的适应性,例如:在崎岖地形爬行的机器人[13 -15 ] 、攀爬机器人[16 -18 ] 、仿毛虫激发反应的GoQbot[19 ] 、仿猎豹奔跑机器人[20 ] ,仿章鱼吸盘的圆锥状抓取器[21 ] 、液压驱动的水下机械手[22 ] 等. 但是这些软抓取器、软体手、软体机器人都需要缆线提供能量,在柔软灵活的执行系统后面由驱动系统提供电能或高压流体,而且常用的空气压缩机、电池、电路板和处理器有体积大、重量大、噪声大等弊端. 如图1 所示为1990年以来,软抓取器、软体仿生手、仿生运动软体机器人以及医用领域中有代表性的软体机器人. 可以看出,在2015年以后,一些软体机器人逐渐在结构上集成执行系统、驱动系统、传感和控制系统,从外观上看是取消了提供信号、电能和高压流体能量的缆绳,在本质上则是实现了集成化、智能化的设计. ...
... 哈佛大学的Shepherd等[13 , 23 -24 ] 进行了一系列陆地爬行软体机器人的研究,弹性材料制成的集成化爬行机器人表现出较强的环境适应能力,能够承受雨水、高温甚至汽车碾压,计划在未来对腿部结构进行优化,最大程度地提高移动性. 麻省理工学院的Katzschmann等[25 -27 ] 进行了一系列关于尾鳍推进仿生鱼的设计开发,实现了超出基于推进器的水下航行器所能实现的功能范围,仿生鱼可以轻松融入海洋环境,在3个维度游泳并连续记录它所跟随的水生生物,可以用于研究水生生物与海洋动力学的相互作用. 卡内基梅隆大学的Patterson等[28 ] 通过在仿生海星上添加颜色标记,利用外部视觉反馈稳健地控制机器人接近目标,未来的工作将集中在扩大可以完成任务的多样性和开发控制系统的技术上,预示软体机器人的高度智能性研究迈出重要一步. 总的来说,集成化智能软体机器人是以实现可控和可预测自主运动为目的的软体机器人的最终发展方向. 本研究依据集成化智能软体机器人的研究现状,从驱动方式、材料与制造、运动方式、传感与控制方面进行论述,探讨软体机器人向着“集成化”、“智能化”发展的重要性及面临的挑战. ...
... 研究人员仿照蛇的鳞片,用激光切割出折纸图案的塑料片,再将塑料片呈三棱柱状包裹在软执行器、微型气泵及控制器上,形成自主爬行的机器蛇,并研究这种特殊皮肤的摩擦性能[34 ] (见图9(a) ). 除了仿蛇运动的机器人外,各种四足爬行机器人也被广泛研究. 在有系缆四足软体机器人[13 ] 的基础上,通过集成微型气泵、电池、阀门和自主控制所需的控制器,设计新型四足爬行机器人,利用硅橡胶与生俱来的弹性,机器人可以抵抗各种不利的环境条件,包括下雪、积水、暴露于火焰甚至被重物碾压[23 ] (见图9(b) ). 另一种嵌入SMA的四足机器人,能够在包括上坡、岩石地形的各种地面上爬行,还能够爬上大于其身高一半的台阶. 与其他行走类软体机器人相比,SMA四足机器人中材料、控制装置、电源和致动装置的紧密集成降低了硬件的复杂性、尺寸和重量,外观上看上去十分简洁[69 ] (见图9(c) ). Waynelovich等[33 ] 设计的六足机器人的每条腿均由3个软执行器构成,通过执行器的组合工作可以实现前行、转向动作,这是利用增加执行器数量来提高自由度的方法(见图9(d) ). ...
Morphing structure for changing hydrodynamic characteristics of a soft underwater walking robot
2
2019
... 3D打印柔软材料的制作速度较快,省去了设计模具及其他多个步骤,直接从下而上自组装出执行器原型,并可以快速地在原型设计中进行修改,无须修改特殊模具[78 ] . 不同的3D打印技术(如直写打印、喷墨打印及光固化打印)都能够使用软材料,并且很多研究人员都使用3D打印直接制作了弯曲执行器[14 , 79 -80 ] ,但使用的材料弹性模量数量级都高于107 Pa,并不能达到软组织、肌肉的柔软程度. 如图8 所示,Wehner等[52 ] 使用包括3D打印的多种制作方式来制作集成化软体机器人Octopus. 将预制的微流体控制器放入模具中,倒入硅橡胶,待硅橡胶固化后,通过嵌入式3D打印的方式将水性油墨打印到硅橡胶基质中;在基质材料交联后,当水蒸发并扩散穿过基质时,水性油墨在升高的温度下“自动排空”,留下了与软控制器连接的开放通道网络. 目前还没有使用3D打印直接制作集成化智能软体机器人躯体的实例,但是随着3D打印突破多材料多喷头技术瓶颈[81 ] ,如果能够规划好动力系统、执行系统及其他系统的材料及位置,直接打印出集成化智能软体机器人将有望实现,这会给软体机器人的商业化提供极大的便利. ...
... 各种有缆软体机器人已经应用在野外探索[14 , 98 ] 、康复医疗[99 -101 ] 、临床手术[81 -82 , 102 -103 ] 等领域,而集成化软体机器人因为自身具有的便捷性,出色的可控和可预测自主运动能力,最有希望应用在勘探未知环境上. 如军事上须处于隐蔽状态,希望机器人能通过门缝、管道、墙缝等窄小通道;矿难、震灾现场希望机器人能独立深入危险区域探查生命迹象等. 如何结合人工智能,让集成化软体机器人具有更高的智能性同样是难点. 人工智能虽然在理论和技术日益成熟,应用领域也不断扩大,但是让软体机器人胜任一些需要人类智能才能完成的复杂工作还需要漫长的研究过程. 希望集成化智能软体机器人的研究可以从驱动方式、材料、制作工艺、运动方式、传感与控制的角度形成一套完整的体系,让集成化智能软体机器人发挥应有的作用. ...
Caterpillar-inspired crawling robot using both compression and bending deformations
2
2019
... 利用软材料的软弹性和安全性,研究人员最早设计了一系列软抓取器[4 -7 ] ,通过在每个软体执行器中设置空腔,利用气泵连接气管远程给空腔施加高压气体,在实现执行器弯曲、伸展动作的同时无伤抓取目标物. 在实现简单抓取功能后,研究人员进而模仿更加灵活的人手进行研究,设计了电共轭流体驱动软体手[8 ] 、平面打印手[9 ] 、RBO Hand[10 ] 、3D打印多关节仿生手[11 ] 等软体手. 人手能实现复杂的抓取和持握的姿态[12 ] ,模仿人手制作的软体手能够适配各种形状和表面性质,并兼具安全、轻量化和高灵活性的优点. 与此同时,一些软体机器人模仿自然生物的运动姿态而设计,能实现身体的高曲率弯曲和扭转,展现出对外界环境的适应性,例如:在崎岖地形爬行的机器人[13 -15 ] 、攀爬机器人[16 -18 ] 、仿毛虫激发反应的GoQbot[19 ] 、仿猎豹奔跑机器人[20 ] ,仿章鱼吸盘的圆锥状抓取器[21 ] 、液压驱动的水下机械手[22 ] 等. 但是这些软抓取器、软体手、软体机器人都需要缆线提供能量,在柔软灵活的执行系统后面由驱动系统提供电能或高压流体,而且常用的空气压缩机、电池、电路板和处理器有体积大、重量大、噪声大等弊端. 如图1 所示为1990年以来,软抓取器、软体仿生手、仿生运动软体机器人以及医用领域中有代表性的软体机器人. 可以看出,在2015年以后,一些软体机器人逐渐在结构上集成执行系统、驱动系统、传感和控制系统,从外观上看是取消了提供信号、电能和高压流体能量的缆绳,在本质上则是实现了集成化、智能化的设计. ...
... 水凝胶极柔软、湿润、排异性小,适合用在与人接触的环境中[57 ] . 但是用水凝胶制作的机器人躯体容易破裂,外表有黏性不宜在空气中使用,所以使用水凝胶的机器人较少. 硅橡胶和PDMS都属于弹性高分子材料,弹性模量和软组织、肌肉相近,在柔软之余有较大的弹性,多数软体机器人的软弹性都来源于这2种材料. 一些软体机器人使用的介电弹性体是由硅橡胶、PDMS混合导电填料制备的[15 -16 , 58 ] ,在电场作用下才能产生驱动力与驱动变形. 介电弹性体作为新型电活性聚合物,具有弹性能量密度高、响应速度快的优点,但是对高驱动电压的需要限制了其在软体机器人中的应用[59 -60 ] . 除了这些具有较好软弹性的材料外,尼龙织物[61 -62 ] 、纤维[63 -65 ] 、卡纸[66 ] 、弹簧[67 ] 等材料常用来包裹在弹性高分子材料外部,起到增强、限制或保护的作用. 金属材料主要包括SMA、IPMC,除了能够作为躯体的组成部分,也是集成化软体机器人的动力来源. ...
Soft wall-climbing robots
3
2018
... 利用软材料的软弹性和安全性,研究人员最早设计了一系列软抓取器[4 -7 ] ,通过在每个软体执行器中设置空腔,利用气泵连接气管远程给空腔施加高压气体,在实现执行器弯曲、伸展动作的同时无伤抓取目标物. 在实现简单抓取功能后,研究人员进而模仿更加灵活的人手进行研究,设计了电共轭流体驱动软体手[8 ] 、平面打印手[9 ] 、RBO Hand[10 ] 、3D打印多关节仿生手[11 ] 等软体手. 人手能实现复杂的抓取和持握的姿态[12 ] ,模仿人手制作的软体手能够适配各种形状和表面性质,并兼具安全、轻量化和高灵活性的优点. 与此同时,一些软体机器人模仿自然生物的运动姿态而设计,能实现身体的高曲率弯曲和扭转,展现出对外界环境的适应性,例如:在崎岖地形爬行的机器人[13 -15 ] 、攀爬机器人[16 -18 ] 、仿毛虫激发反应的GoQbot[19 ] 、仿猎豹奔跑机器人[20 ] ,仿章鱼吸盘的圆锥状抓取器[21 ] 、液压驱动的水下机械手[22 ] 等. 但是这些软抓取器、软体手、软体机器人都需要缆线提供能量,在柔软灵活的执行系统后面由驱动系统提供电能或高压流体,而且常用的空气压缩机、电池、电路板和处理器有体积大、重量大、噪声大等弊端. 如图1 所示为1990年以来,软抓取器、软体仿生手、仿生运动软体机器人以及医用领域中有代表性的软体机器人. 可以看出,在2015年以后,一些软体机器人逐渐在结构上集成执行系统、驱动系统、传感和控制系统,从外观上看是取消了提供信号、电能和高压流体能量的缆绳,在本质上则是实现了集成化、智能化的设计. ...
... 智能材料利用能够在外部刺激下(光、热、电、磁等)产生变形的物理属性变化来实现驱动功能[38 ] . 软体机器人使用的智能材料主要包括响应性水凝胶、介电弹性聚合物(dielectric elastic polymer,DE)、形状记忆合金(shape memory alloys,SMA)和离子聚合物-金属复合材料(ionic polymer-metal composite,IPMC). 响应性水凝胶在pH值、温度、光等多种外界刺激下能够展现出复杂的响应性溶胀行为,物理变形方式更加多样化. 例如,在特定溶液中能够自我修复的水凝胶构件块具有内部通道和外部连接器,能够堆叠成复杂形状的微流控装置[39 ] ;具有不同终止信息序列的水凝胶在溶胀时也会变成不同的形状[40 ] . 介电弹性聚合物具有较好的驱动力和响应速度,适合应用在快速响应的机器人结构中,例如快速频率跳跃机器人[41 ] 、双脚攀爬机器[16 ] . ...
... 水凝胶极柔软、湿润、排异性小,适合用在与人接触的环境中[57 ] . 但是用水凝胶制作的机器人躯体容易破裂,外表有黏性不宜在空气中使用,所以使用水凝胶的机器人较少. 硅橡胶和PDMS都属于弹性高分子材料,弹性模量和软组织、肌肉相近,在柔软之余有较大的弹性,多数软体机器人的软弹性都来源于这2种材料. 一些软体机器人使用的介电弹性体是由硅橡胶、PDMS混合导电填料制备的[15 -16 , 58 ] ,在电场作用下才能产生驱动力与驱动变形. 介电弹性体作为新型电活性聚合物,具有弹性能量密度高、响应速度快的优点,但是对高驱动电压的需要限制了其在软体机器人中的应用[59 -60 ] . 除了这些具有较好软弹性的材料外,尼龙织物[61 -62 ] 、纤维[63 -65 ] 、卡纸[66 ] 、弹簧[67 ] 等材料常用来包裹在弹性高分子材料外部,起到增强、限制或保护的作用. 金属材料主要包括SMA、IPMC,除了能够作为躯体的组成部分,也是集成化软体机器人的动力来源. ...
Designing fiber-reinforced soft actuators for planar curvilinear shape matching
0
2020
Soft rod-climbing robot inspired by winding locomotion of snake
1
2020
... 利用软材料的软弹性和安全性,研究人员最早设计了一系列软抓取器[4 -7 ] ,通过在每个软体执行器中设置空腔,利用气泵连接气管远程给空腔施加高压气体,在实现执行器弯曲、伸展动作的同时无伤抓取目标物. 在实现简单抓取功能后,研究人员进而模仿更加灵活的人手进行研究,设计了电共轭流体驱动软体手[8 ] 、平面打印手[9 ] 、RBO Hand[10 ] 、3D打印多关节仿生手[11 ] 等软体手. 人手能实现复杂的抓取和持握的姿态[12 ] ,模仿人手制作的软体手能够适配各种形状和表面性质,并兼具安全、轻量化和高灵活性的优点. 与此同时,一些软体机器人模仿自然生物的运动姿态而设计,能实现身体的高曲率弯曲和扭转,展现出对外界环境的适应性,例如:在崎岖地形爬行的机器人[13 -15 ] 、攀爬机器人[16 -18 ] 、仿毛虫激发反应的GoQbot[19 ] 、仿猎豹奔跑机器人[20 ] ,仿章鱼吸盘的圆锥状抓取器[21 ] 、液压驱动的水下机械手[22 ] 等. 但是这些软抓取器、软体手、软体机器人都需要缆线提供能量,在柔软灵活的执行系统后面由驱动系统提供电能或高压流体,而且常用的空气压缩机、电池、电路板和处理器有体积大、重量大、噪声大等弊端. 如图1 所示为1990年以来,软抓取器、软体仿生手、仿生运动软体机器人以及医用领域中有代表性的软体机器人. 可以看出,在2015年以后,一些软体机器人逐渐在结构上集成执行系统、驱动系统、传感和控制系统,从外观上看是取消了提供信号、电能和高压流体能量的缆绳,在本质上则是实现了集成化、智能化的设计. ...
GoQBot: a caterpillar-inspired soft-bodied rolling robot
1
2011
... 利用软材料的软弹性和安全性,研究人员最早设计了一系列软抓取器[4 -7 ] ,通过在每个软体执行器中设置空腔,利用气泵连接气管远程给空腔施加高压气体,在实现执行器弯曲、伸展动作的同时无伤抓取目标物. 在实现简单抓取功能后,研究人员进而模仿更加灵活的人手进行研究,设计了电共轭流体驱动软体手[8 ] 、平面打印手[9 ] 、RBO Hand[10 ] 、3D打印多关节仿生手[11 ] 等软体手. 人手能实现复杂的抓取和持握的姿态[12 ] ,模仿人手制作的软体手能够适配各种形状和表面性质,并兼具安全、轻量化和高灵活性的优点. 与此同时,一些软体机器人模仿自然生物的运动姿态而设计,能实现身体的高曲率弯曲和扭转,展现出对外界环境的适应性,例如:在崎岖地形爬行的机器人[13 -15 ] 、攀爬机器人[16 -18 ] 、仿毛虫激发反应的GoQbot[19 ] 、仿猎豹奔跑机器人[20 ] ,仿章鱼吸盘的圆锥状抓取器[21 ] 、液压驱动的水下机械手[22 ] 等. 但是这些软抓取器、软体手、软体机器人都需要缆线提供能量,在柔软灵活的执行系统后面由驱动系统提供电能或高压流体,而且常用的空气压缩机、电池、电路板和处理器有体积大、重量大、噪声大等弊端. 如图1 所示为1990年以来,软抓取器、软体仿生手、仿生运动软体机器人以及医用领域中有代表性的软体机器人. 可以看出,在2015年以后,一些软体机器人逐渐在结构上集成执行系统、驱动系统、传感和控制系统,从外观上看是取消了提供信号、电能和高压流体能量的缆绳,在本质上则是实现了集成化、智能化的设计. ...
Leveraging elastic instabilities for amplified performance: spine-inspired high-speed and high-force soft robots
2
2020
... 利用软材料的软弹性和安全性,研究人员最早设计了一系列软抓取器[4 -7 ] ,通过在每个软体执行器中设置空腔,利用气泵连接气管远程给空腔施加高压气体,在实现执行器弯曲、伸展动作的同时无伤抓取目标物. 在实现简单抓取功能后,研究人员进而模仿更加灵活的人手进行研究,设计了电共轭流体驱动软体手[8 ] 、平面打印手[9 ] 、RBO Hand[10 ] 、3D打印多关节仿生手[11 ] 等软体手. 人手能实现复杂的抓取和持握的姿态[12 ] ,模仿人手制作的软体手能够适配各种形状和表面性质,并兼具安全、轻量化和高灵活性的优点. 与此同时,一些软体机器人模仿自然生物的运动姿态而设计,能实现身体的高曲率弯曲和扭转,展现出对外界环境的适应性,例如:在崎岖地形爬行的机器人[13 -15 ] 、攀爬机器人[16 -18 ] 、仿毛虫激发反应的GoQbot[19 ] 、仿猎豹奔跑机器人[20 ] ,仿章鱼吸盘的圆锥状抓取器[21 ] 、液压驱动的水下机械手[22 ] 等. 但是这些软抓取器、软体手、软体机器人都需要缆线提供能量,在柔软灵活的执行系统后面由驱动系统提供电能或高压流体,而且常用的空气压缩机、电池、电路板和处理器有体积大、重量大、噪声大等弊端. 如图1 所示为1990年以来,软抓取器、软体仿生手、仿生运动软体机器人以及医用领域中有代表性的软体机器人. 可以看出,在2015年以后,一些软体机器人逐渐在结构上集成执行系统、驱动系统、传感和控制系统,从外观上看是取消了提供信号、电能和高压流体能量的缆绳,在本质上则是实现了集成化、智能化的设计. ...
... (2)运动速度缓慢. 抛开跳跃运动的软体机器人,陆地生物仿生的软体机器人前进速度最快约为0.78身长/s[20 ] ,水生生物仿生的软体机器人运动速度最快约为0.65身长/s[70 ] ,相比刚性机器人mini Cheetah能达到的10身长/s[96 ] ,还有较大差距. 想要提高软体机器人的移动速度,首先要依赖新型的高效动力源,以“气动电池”为例,过氧化氢分解的质量能量密度约为锂电池的5倍,而甲烷燃烧的质量能量密度约为锂电池的22倍,使用能量密度高的能量源可以在占用小体积的同时获得更高能量. 其次,流体驱动执行器要避免无做功式膨胀,可以使用纤维增强、织物增强或其他有效方式提高变形量. ...
Octopus arm-inspired tapered soft actuators with suckers for improved grasping
2
2020
... 利用软材料的软弹性和安全性,研究人员最早设计了一系列软抓取器[4 -7 ] ,通过在每个软体执行器中设置空腔,利用气泵连接气管远程给空腔施加高压气体,在实现执行器弯曲、伸展动作的同时无伤抓取目标物. 在实现简单抓取功能后,研究人员进而模仿更加灵活的人手进行研究,设计了电共轭流体驱动软体手[8 ] 、平面打印手[9 ] 、RBO Hand[10 ] 、3D打印多关节仿生手[11 ] 等软体手. 人手能实现复杂的抓取和持握的姿态[12 ] ,模仿人手制作的软体手能够适配各种形状和表面性质,并兼具安全、轻量化和高灵活性的优点. 与此同时,一些软体机器人模仿自然生物的运动姿态而设计,能实现身体的高曲率弯曲和扭转,展现出对外界环境的适应性,例如:在崎岖地形爬行的机器人[13 -15 ] 、攀爬机器人[16 -18 ] 、仿毛虫激发反应的GoQbot[19 ] 、仿猎豹奔跑机器人[20 ] ,仿章鱼吸盘的圆锥状抓取器[21 ] 、液压驱动的水下机械手[22 ] 等. 但是这些软抓取器、软体手、软体机器人都需要缆线提供能量,在柔软灵活的执行系统后面由驱动系统提供电能或高压流体,而且常用的空气压缩机、电池、电路板和处理器有体积大、重量大、噪声大等弊端. 如图1 所示为1990年以来,软抓取器、软体仿生手、仿生运动软体机器人以及医用领域中有代表性的软体机器人. 可以看出,在2015年以后,一些软体机器人逐渐在结构上集成执行系统、驱动系统、传感和控制系统,从外观上看是取消了提供信号、电能和高压流体能量的缆绳,在本质上则是实现了集成化、智能化的设计. ...
... 集成化智能软体机器人为了实现结构上的集成化设计,通常将微型气泵[21 , 32 -34 ] 或小型高压CO2 气瓶[35 ] 设计在结构内部,形成完整独立的整体. 这2种方法各有利弊,微型气泵能够提供持续稳定的流体压力,但是须将供电电池同时集成到整体中. 小型高压CO2 气瓶虽然没有电池的限制,但是气瓶提供的气体压力会随气体损失而下降,在使用后须再次补充. 如图2(a) 所示为Hou等[36 -37 ] 研发的仿生飞行乌贼,利用高压CO2 气瓶喷出气体推动机器人从水中飞到空中,但是这种飞行是一次性的,须再次给气瓶充气才能再次工作. 同样,Fan等[35 ] 研发的仿生青蛙因为高压气瓶中的气体有限只能完成数个动作周期. Katzschmann等[25 ] 则利用微型液压泵让液体介质在仿生鱼尾的2个内腔中以闭环的方式流动,既实现了仿生鱼尾左右摆动的动作,又解决了工作周期短的问题,如图2(b) 所示. ...
An underwater robotic manipulator with soft bladders and compact depth-independent actuation
1
2020
... 利用软材料的软弹性和安全性,研究人员最早设计了一系列软抓取器[4 -7 ] ,通过在每个软体执行器中设置空腔,利用气泵连接气管远程给空腔施加高压气体,在实现执行器弯曲、伸展动作的同时无伤抓取目标物. 在实现简单抓取功能后,研究人员进而模仿更加灵活的人手进行研究,设计了电共轭流体驱动软体手[8 ] 、平面打印手[9 ] 、RBO Hand[10 ] 、3D打印多关节仿生手[11 ] 等软体手. 人手能实现复杂的抓取和持握的姿态[12 ] ,模仿人手制作的软体手能够适配各种形状和表面性质,并兼具安全、轻量化和高灵活性的优点. 与此同时,一些软体机器人模仿自然生物的运动姿态而设计,能实现身体的高曲率弯曲和扭转,展现出对外界环境的适应性,例如:在崎岖地形爬行的机器人[13 -15 ] 、攀爬机器人[16 -18 ] 、仿毛虫激发反应的GoQbot[19 ] 、仿猎豹奔跑机器人[20 ] ,仿章鱼吸盘的圆锥状抓取器[21 ] 、液压驱动的水下机械手[22 ] 等. 但是这些软抓取器、软体手、软体机器人都需要缆线提供能量,在柔软灵活的执行系统后面由驱动系统提供电能或高压流体,而且常用的空气压缩机、电池、电路板和处理器有体积大、重量大、噪声大等弊端. 如图1 所示为1990年以来,软抓取器、软体仿生手、仿生运动软体机器人以及医用领域中有代表性的软体机器人. 可以看出,在2015年以后,一些软体机器人逐渐在结构上集成执行系统、驱动系统、传感和控制系统,从外观上看是取消了提供信号、电能和高压流体能量的缆绳,在本质上则是实现了集成化、智能化的设计. ...
A resilient, untethered soft robot
4
2014
... 哈佛大学的Shepherd等[13 , 23 -24 ] 进行了一系列陆地爬行软体机器人的研究,弹性材料制成的集成化爬行机器人表现出较强的环境适应能力,能够承受雨水、高温甚至汽车碾压,计划在未来对腿部结构进行优化,最大程度地提高移动性. 麻省理工学院的Katzschmann等[25 -27 ] 进行了一系列关于尾鳍推进仿生鱼的设计开发,实现了超出基于推进器的水下航行器所能实现的功能范围,仿生鱼可以轻松融入海洋环境,在3个维度游泳并连续记录它所跟随的水生生物,可以用于研究水生生物与海洋动力学的相互作用. 卡内基梅隆大学的Patterson等[28 ] 通过在仿生海星上添加颜色标记,利用外部视觉反馈稳健地控制机器人接近目标,未来的工作将集中在扩大可以完成任务的多样性和开发控制系统的技术上,预示软体机器人的高度智能性研究迈出重要一步. 总的来说,集成化智能软体机器人是以实现可控和可预测自主运动为目的的软体机器人的最终发展方向. 本研究依据集成化智能软体机器人的研究现状,从驱动方式、材料与制造、运动方式、传感与控制方面进行论述,探讨软体机器人向着“集成化”、“智能化”发展的重要性及面临的挑战. ...
... Material,production,energy source and movement posture of integrated intelligent soft robots
Tab.1 名称 材料 制造工艺 能量来源 运动方式 四足爬行机器人[23 ] 硅橡胶:Elastosil M4601,Ecoflex 0030 软光刻 微型气泵 海星:爬行 流体驱动仿生鱼[25 ] 硅橡胶:Mold Star 15 模具铸造法 微型液压泵 鱼:游动 仿生海星[28 ] 硅橡胶:Dragonskin 10;SMA 铸造法,3D打印 锂聚合物电池 海星:水下行走 仿生蛇[32 ] 硅橡胶 模具铸造法 微型气泵 蛇:爬行 六足行走机器人[33 ] 硅橡胶:Ecoflex 30 模具铸造法 微型气泵 行走 仿蛇爬行机器人[34 ] 硅橡胶:Ecoflex 0030 激光切割,模具铸造法 微型气泵 蛇:爬行 仿生青蛙[35 ] 硅橡胶:Ecoflex 0050;PDMS:Sylgard 184 模具铸造法,3D打印 高压CO2 气瓶 青蛙:游动 仿生乌贼[36 ] 硅橡胶:Ecoflex 0030 模具铸造法,3D打印 高压CO2 气瓶 乌贼:喷射前进 机械鳐鱼[43 ] SMA;聚氯乙烯 − 锂聚合物电池 鳐:游动 仿生水蛇[44 ] SMA;聚氨酯 − 锂聚合物电池 蛇:游动 IPMC驱动仿生鱼[45 ] IPMC − 锂聚合物电池 鱼:游动 仿生蝠鲼[47 ] IPMC;PDMS 模具铸造法 锂聚合物电池 蝠鲼:游动 仿生魔鬼鱼[48 ] IPMC;PDMS 模具铸造法,3D打印 锂聚合物电池 魔鬼鱼:游动 滚动机器人[49 ] 硅橡胶:Ecoflex 0030 模具铸造法 过氧化氢电池 滚动 多次跳跃机器人[50 ] 类橡胶 3D打印 丁烷燃料电池 跳跃 Octopus[52 ] 硅橡胶:Ecoflex 30;PDMS:Sylgard 184 模具铸造法,软光刻,3D打印,激光切割 过氧化氢电池 章鱼:抬腿 仿生狮子鱼[53 ] 硅橡胶:Dragonskin 20;石墨 模具铸造法,3D打印 碘化锌电池液 鱼:游动 单次跳跃机器人[54 ] 硅橡胶:M4601 软光刻,3D打印 丁烷燃料电池 跳跃 机械鳗鱼[68 ] 硅橡胶:Ecoflex 0030,Dragon Skin 0010 软光刻,3D打印 齿轮泵 游动 SMA四足机器人[69 ] SMA、导热弹性体 − 锂聚合物电池 跑动 介电弹性体驱动鳐鱼[70 ] PDMS:Sylgard 184;水凝胶 模具铸造法 介电弹性体 鳐:游动 仿生蚯蚓[71 ] SMA、聚醚醚酮树脂 − 锂聚合物电池 蚯蚓:蠕动 DE驱动乌贼[72 ] 介电弹性体 − 锂聚合物电池 乌贼:喷射前进
2.2. 制造方法 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
... 软光刻技术是利用光刻胶感光后发生光化学反应而产生耐蚀性的特点,将掩模版上的图案刻制到被加工表面上的技术. 在制作软体机器人的过程中,通常将PDMS材料倒在带有图案的硅晶片上,借助电子元件让光照射模具的表面,使覆盖在图案上的一层薄薄的高分子膜曝光,然后溶解没有图案的区域[76 ] . 软光刻技术被用来直接制备带有气体栅格通道的机器人主体[23 ] 和跳跃机器人的执行器[54 ] ,在仿生水蛇的多节软执行器的制作中也使用了软光刻技术[68 ] . 软光刻技术应用在软体机器人的最早阶段,Marchese称这种制作工艺制作出的软体结构为2.5D的,因为制作的软体结构较大程度上被限制在平面上[77 ] . 经过逐渐发展,通过将软光刻制作的各层精确对齐黏合,能够得到具有嵌入式微流体通路和几乎任意复杂轮廓的柔软层,也形成了更加立体化的软体机器人. 如图7 所示为软体仿生蜘蛛[76 ] 的软光刻制作流程,将PDMS倒在有特殊图案的硅晶片上;在经过曝光、脱气和旋涂处理后,将PDMS层从黏合剂基底剥离;根据特定设计图案,使用精密激光微加工系统切割弹性体;将以上步骤重复12次,制备12个不同的PDMS层;将这些PDMS层黏合,组成软体仿生蜘蛛. ...
... 研究人员仿照蛇的鳞片,用激光切割出折纸图案的塑料片,再将塑料片呈三棱柱状包裹在软执行器、微型气泵及控制器上,形成自主爬行的机器蛇,并研究这种特殊皮肤的摩擦性能[34 ] (见图9(a) ). 除了仿蛇运动的机器人外,各种四足爬行机器人也被广泛研究. 在有系缆四足软体机器人[13 ] 的基础上,通过集成微型气泵、电池、阀门和自主控制所需的控制器,设计新型四足爬行机器人,利用硅橡胶与生俱来的弹性,机器人可以抵抗各种不利的环境条件,包括下雪、积水、暴露于火焰甚至被重物碾压[23 ] (见图9(b) ). 另一种嵌入SMA的四足机器人,能够在包括上坡、岩石地形的各种地面上爬行,还能够爬上大于其身高一半的台阶. 与其他行走类软体机器人相比,SMA四足机器人中材料、控制装置、电源和致动装置的紧密集成降低了硬件的复杂性、尺寸和重量,外观上看上去十分简洁[69 ] (见图9(c) ). Waynelovich等[33 ] 设计的六足机器人的每条腿均由3个软执行器构成,通过执行器的组合工作可以实现前行、转向动作,这是利用增加执行器数量来提高自由度的方法(见图9(d) ). ...
Camouflage and display for soft machines
2
2012
... 哈佛大学的Shepherd等[13 , 23 -24 ] 进行了一系列陆地爬行软体机器人的研究,弹性材料制成的集成化爬行机器人表现出较强的环境适应能力,能够承受雨水、高温甚至汽车碾压,计划在未来对腿部结构进行优化,最大程度地提高移动性. 麻省理工学院的Katzschmann等[25 -27 ] 进行了一系列关于尾鳍推进仿生鱼的设计开发,实现了超出基于推进器的水下航行器所能实现的功能范围,仿生鱼可以轻松融入海洋环境,在3个维度游泳并连续记录它所跟随的水生生物,可以用于研究水生生物与海洋动力学的相互作用. 卡内基梅隆大学的Patterson等[28 ] 通过在仿生海星上添加颜色标记,利用外部视觉反馈稳健地控制机器人接近目标,未来的工作将集中在扩大可以完成任务的多样性和开发控制系统的技术上,预示软体机器人的高度智能性研究迈出重要一步. 总的来说,集成化智能软体机器人是以实现可控和可预测自主运动为目的的软体机器人的最终发展方向. 本研究依据集成化智能软体机器人的研究现状,从驱动方式、材料与制造、运动方式、传感与控制方面进行论述,探讨软体机器人向着“集成化”、“智能化”发展的重要性及面临的挑战. ...
... 软体动物没有骨骼之类的坚硬结构,身体具有较高的自由度,这是在进化的过程中它们的身体为了应对外界激励做出的改变. 这些柔性组织既可以缩小体积,使他们进入狭小的空间,也在受到外界冲击时提供缓冲,在更大面积上平摊应力[24 ] . 目前的软体机器人多是模仿自然界中生物,利用柔软材料实现超越骨骼和关节的结构,实现肌肉、肌腱和皮肤相对应的功能[86 ] . 这些从自然界中汲取灵感的软体机器人,要比刚性机器人具有更好的灵活性、适应性和安全性. 按照运动姿态,集成化智能软体机器人的运动方式一般分为陆地生物仿生运动和水下生物仿生运动2类. ...
Exploration of underwater life with an acoustically controlled soft robotic fish
7
2018
... 哈佛大学的Shepherd等[13 , 23 -24 ] 进行了一系列陆地爬行软体机器人的研究,弹性材料制成的集成化爬行机器人表现出较强的环境适应能力,能够承受雨水、高温甚至汽车碾压,计划在未来对腿部结构进行优化,最大程度地提高移动性. 麻省理工学院的Katzschmann等[25 -27 ] 进行了一系列关于尾鳍推进仿生鱼的设计开发,实现了超出基于推进器的水下航行器所能实现的功能范围,仿生鱼可以轻松融入海洋环境,在3个维度游泳并连续记录它所跟随的水生生物,可以用于研究水生生物与海洋动力学的相互作用. 卡内基梅隆大学的Patterson等[28 ] 通过在仿生海星上添加颜色标记,利用外部视觉反馈稳健地控制机器人接近目标,未来的工作将集中在扩大可以完成任务的多样性和开发控制系统的技术上,预示软体机器人的高度智能性研究迈出重要一步. 总的来说,集成化智能软体机器人是以实现可控和可预测自主运动为目的的软体机器人的最终发展方向. 本研究依据集成化智能软体机器人的研究现状,从驱动方式、材料与制造、运动方式、传感与控制方面进行论述,探讨软体机器人向着“集成化”、“智能化”发展的重要性及面临的挑战. ...
... 集成化智能软体机器人为了实现结构上的集成化设计,通常将微型气泵[21 , 32 -34 ] 或小型高压CO2 气瓶[35 ] 设计在结构内部,形成完整独立的整体. 这2种方法各有利弊,微型气泵能够提供持续稳定的流体压力,但是须将供电电池同时集成到整体中. 小型高压CO2 气瓶虽然没有电池的限制,但是气瓶提供的气体压力会随气体损失而下降,在使用后须再次补充. 如图2(a) 所示为Hou等[36 -37 ] 研发的仿生飞行乌贼,利用高压CO2 气瓶喷出气体推动机器人从水中飞到空中,但是这种飞行是一次性的,须再次给气瓶充气才能再次工作. 同样,Fan等[35 ] 研发的仿生青蛙因为高压气瓶中的气体有限只能完成数个动作周期. Katzschmann等[25 ] 则利用微型液压泵让液体介质在仿生鱼尾的2个内腔中以闭环的方式流动,既实现了仿生鱼尾左右摆动的动作,又解决了工作周期短的问题,如图2(b) 所示. ...
... Material,production,energy source and movement posture of integrated intelligent soft robots
Tab.1 名称 材料 制造工艺 能量来源 运动方式 四足爬行机器人[23 ] 硅橡胶:Elastosil M4601,Ecoflex 0030 软光刻 微型气泵 海星:爬行 流体驱动仿生鱼[25 ] 硅橡胶:Mold Star 15 模具铸造法 微型液压泵 鱼:游动 仿生海星[28 ] 硅橡胶:Dragonskin 10;SMA 铸造法,3D打印 锂聚合物电池 海星:水下行走 仿生蛇[32 ] 硅橡胶 模具铸造法 微型气泵 蛇:爬行 六足行走机器人[33 ] 硅橡胶:Ecoflex 30 模具铸造法 微型气泵 行走 仿蛇爬行机器人[34 ] 硅橡胶:Ecoflex 0030 激光切割,模具铸造法 微型气泵 蛇:爬行 仿生青蛙[35 ] 硅橡胶:Ecoflex 0050;PDMS:Sylgard 184 模具铸造法,3D打印 高压CO2 气瓶 青蛙:游动 仿生乌贼[36 ] 硅橡胶:Ecoflex 0030 模具铸造法,3D打印 高压CO2 气瓶 乌贼:喷射前进 机械鳐鱼[43 ] SMA;聚氯乙烯 − 锂聚合物电池 鳐:游动 仿生水蛇[44 ] SMA;聚氨酯 − 锂聚合物电池 蛇:游动 IPMC驱动仿生鱼[45 ] IPMC − 锂聚合物电池 鱼:游动 仿生蝠鲼[47 ] IPMC;PDMS 模具铸造法 锂聚合物电池 蝠鲼:游动 仿生魔鬼鱼[48 ] IPMC;PDMS 模具铸造法,3D打印 锂聚合物电池 魔鬼鱼:游动 滚动机器人[49 ] 硅橡胶:Ecoflex 0030 模具铸造法 过氧化氢电池 滚动 多次跳跃机器人[50 ] 类橡胶 3D打印 丁烷燃料电池 跳跃 Octopus[52 ] 硅橡胶:Ecoflex 30;PDMS:Sylgard 184 模具铸造法,软光刻,3D打印,激光切割 过氧化氢电池 章鱼:抬腿 仿生狮子鱼[53 ] 硅橡胶:Dragonskin 20;石墨 模具铸造法,3D打印 碘化锌电池液 鱼:游动 单次跳跃机器人[54 ] 硅橡胶:M4601 软光刻,3D打印 丁烷燃料电池 跳跃 机械鳗鱼[68 ] 硅橡胶:Ecoflex 0030,Dragon Skin 0010 软光刻,3D打印 齿轮泵 游动 SMA四足机器人[69 ] SMA、导热弹性体 − 锂聚合物电池 跑动 介电弹性体驱动鳐鱼[70 ] PDMS:Sylgard 184;水凝胶 模具铸造法 介电弹性体 鳐:游动 仿生蚯蚓[71 ] SMA、聚醚醚酮树脂 − 锂聚合物电池 蚯蚓:蠕动 DE驱动乌贼[72 ] 介电弹性体 − 锂聚合物电池 乌贼:喷射前进
2.2. 制造方法 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
... 铸造技术是上述4类主要制造工艺中最简单常见的. 利用计算机辅助软件设计模具,然后3D打印或切削加工来制备模具[74 ] ;在模具中倒入液态弹性材料,在适当温度下烘烤/光照[49 , 75 ] . 为了封闭流体通道,须将开放通道件胶合到扁平膜上,黏合的部分涂抹相同液态弹性材料,再次烘烤或光照. 为了让弹性执行器在加压时达到理想的弯曲效果,常在固化时在执行器一侧加入不可延展的材料. 集成化设计的流体驱动仿生鱼[25 ] 、仿生蛇[32 ] 、六足行走机器人[33 ] 、滚动机器人[49 ] 、仿生青蛙[35 ] 等在制作软执行器时都使用了铸造法. 如图6 所示为流体驱动仿生鱼的鱼尾部分采用铸造法的制作过程,首先用模具铸造出鱼尾的三部分,然后组装胶合起来. 铸造法的应用虽然普遍,但在加工前有很多设计和模具制造的工作,且弹性材料也有凝固过程,所以总体花费时间较长. ...
... 仿生鱼尾铸造过程[25 ] ...
... Casting process of bionic fish tail[25 ] ...
... 在外部传统传感器的使用上,软体机器人和刚性机器人相同,例如流体驱动仿生鱼安装了微型摄像头、深度传感器和惯性测量单元[25 ] ,如图11(a) 所示;六足行走机器人在双目摄像头的基础上使用英特尔的四核处理器来提供足够的计算资源来实现人工智能功能,例如导航、物体检测和识别、面部识别甚至语言交互[33 ] . 如图11(b) 所示,Patterson等[28 ] 通过在仿生海星上添加颜色标记,然后用外部环境中的摄像机提供视觉反馈,仿生海星通过计算能够逐步运动到指定位置. 如图11(c) 所示,Yang等[72 ] 将利用摄像头收集的信息通过机器学习优化介电弹性体驱动乌贼的运动控制策略,强化学习后机器人的运动速度提升了91%. 可以说机器学习的调整效率远高于人手动调整,这种基于视觉的捕捉系统给后续集成化软体机器人提供了较好的优化思路. 这意味着软体机器人向着更高的智能化迈进,但未来除了传统的传感器外,也需要更多的新型柔性传感器提供信息. ...
Autonomous soft robotic fish capable of escape maneuvers using fluidic elastomer actuators
1
2014
... 在水中生活的动物,大多数都是以游泳的运动方式,通过鳍或身体附肢的摆动产生动力,克服水的阻力来运动. 鱼类中表现出的特殊行为是逃生反应,需要鱼类将身体快速弯曲到大角度,以便加速远离不利的外部刺激[87 -88 ] . 以液体介质驱动鱼尾摆动的远程人工操作软体机械鱼,身体几乎完全由硅橡胶组成,能够实现模仿鱼类向前游进和逃生反应运动[26 , 77 ] (见图10(a) ). 另一款仿生狮子鱼除了外形、运动方式和狮子鱼极为相像外,最大的亮点是自身能量循环系统. 仿生血管系统以氧化还原液流电池为能量来源,将液压传递、致动和能量存储的功能整合到单个集成设计中,从而成几何倍数地增加了机器人的能量密度,可以实现长达36 h的连续运转[53 ] (见图10(b) ). 除了利用尾鳍摆动产生动力的机器人外,还有模仿水蛇摆动身体前进或者模仿鳐鱼利用胸鳍摆动产生动力的机器人. 将SMA嵌入高分子聚合物(聚氨酯)中作为仿生水蛇的身体,通电时SMA弯曲,弹性能量被储存在弹性基板中;停止通电,弹性能量被释放出来驱动返回运动,就像蛇一样弯蜒运动[44 ] (见图10(c) ). 按照同样的驱动原理,研究人员模仿鳐鱼的游动方式制作了软体机器人,机器人主体分为背盖、中板、腹盖三部分,2个胸鳍由嵌入SMA的塑料板组成,能够较好地实现前进、转弯动作[43 ] (见图10(d) ). 如图10(e) 所示的仿生鳐鱼主要由介电弹性体和水凝胶组成,除了优秀的运动能力外还有着良好透明性、持久性和温度耐受性[70 ] . ...
1
... 哈佛大学的Shepherd等[13 , 23 -24 ] 进行了一系列陆地爬行软体机器人的研究,弹性材料制成的集成化爬行机器人表现出较强的环境适应能力,能够承受雨水、高温甚至汽车碾压,计划在未来对腿部结构进行优化,最大程度地提高移动性. 麻省理工学院的Katzschmann等[25 -27 ] 进行了一系列关于尾鳍推进仿生鱼的设计开发,实现了超出基于推进器的水下航行器所能实现的功能范围,仿生鱼可以轻松融入海洋环境,在3个维度游泳并连续记录它所跟随的水生生物,可以用于研究水生生物与海洋动力学的相互作用. 卡内基梅隆大学的Patterson等[28 ] 通过在仿生海星上添加颜色标记,利用外部视觉反馈稳健地控制机器人接近目标,未来的工作将集中在扩大可以完成任务的多样性和开发控制系统的技术上,预示软体机器人的高度智能性研究迈出重要一步. 总的来说,集成化智能软体机器人是以实现可控和可预测自主运动为目的的软体机器人的最终发展方向. 本研究依据集成化智能软体机器人的研究现状,从驱动方式、材料与制造、运动方式、传感与控制方面进行论述,探讨软体机器人向着“集成化”、“智能化”发展的重要性及面临的挑战. ...
4
... 哈佛大学的Shepherd等[13 , 23 -24 ] 进行了一系列陆地爬行软体机器人的研究,弹性材料制成的集成化爬行机器人表现出较强的环境适应能力,能够承受雨水、高温甚至汽车碾压,计划在未来对腿部结构进行优化,最大程度地提高移动性. 麻省理工学院的Katzschmann等[25 -27 ] 进行了一系列关于尾鳍推进仿生鱼的设计开发,实现了超出基于推进器的水下航行器所能实现的功能范围,仿生鱼可以轻松融入海洋环境,在3个维度游泳并连续记录它所跟随的水生生物,可以用于研究水生生物与海洋动力学的相互作用. 卡内基梅隆大学的Patterson等[28 ] 通过在仿生海星上添加颜色标记,利用外部视觉反馈稳健地控制机器人接近目标,未来的工作将集中在扩大可以完成任务的多样性和开发控制系统的技术上,预示软体机器人的高度智能性研究迈出重要一步. 总的来说,集成化智能软体机器人是以实现可控和可预测自主运动为目的的软体机器人的最终发展方向. 本研究依据集成化智能软体机器人的研究现状,从驱动方式、材料与制造、运动方式、传感与控制方面进行论述,探讨软体机器人向着“集成化”、“智能化”发展的重要性及面临的挑战. ...
... Material,production,energy source and movement posture of integrated intelligent soft robots
Tab.1 名称 材料 制造工艺 能量来源 运动方式 四足爬行机器人[23 ] 硅橡胶:Elastosil M4601,Ecoflex 0030 软光刻 微型气泵 海星:爬行 流体驱动仿生鱼[25 ] 硅橡胶:Mold Star 15 模具铸造法 微型液压泵 鱼:游动 仿生海星[28 ] 硅橡胶:Dragonskin 10;SMA 铸造法,3D打印 锂聚合物电池 海星:水下行走 仿生蛇[32 ] 硅橡胶 模具铸造法 微型气泵 蛇:爬行 六足行走机器人[33 ] 硅橡胶:Ecoflex 30 模具铸造法 微型气泵 行走 仿蛇爬行机器人[34 ] 硅橡胶:Ecoflex 0030 激光切割,模具铸造法 微型气泵 蛇:爬行 仿生青蛙[35 ] 硅橡胶:Ecoflex 0050;PDMS:Sylgard 184 模具铸造法,3D打印 高压CO2 气瓶 青蛙:游动 仿生乌贼[36 ] 硅橡胶:Ecoflex 0030 模具铸造法,3D打印 高压CO2 气瓶 乌贼:喷射前进 机械鳐鱼[43 ] SMA;聚氯乙烯 − 锂聚合物电池 鳐:游动 仿生水蛇[44 ] SMA;聚氨酯 − 锂聚合物电池 蛇:游动 IPMC驱动仿生鱼[45 ] IPMC − 锂聚合物电池 鱼:游动 仿生蝠鲼[47 ] IPMC;PDMS 模具铸造法 锂聚合物电池 蝠鲼:游动 仿生魔鬼鱼[48 ] IPMC;PDMS 模具铸造法,3D打印 锂聚合物电池 魔鬼鱼:游动 滚动机器人[49 ] 硅橡胶:Ecoflex 0030 模具铸造法 过氧化氢电池 滚动 多次跳跃机器人[50 ] 类橡胶 3D打印 丁烷燃料电池 跳跃 Octopus[52 ] 硅橡胶:Ecoflex 30;PDMS:Sylgard 184 模具铸造法,软光刻,3D打印,激光切割 过氧化氢电池 章鱼:抬腿 仿生狮子鱼[53 ] 硅橡胶:Dragonskin 20;石墨 模具铸造法,3D打印 碘化锌电池液 鱼:游动 单次跳跃机器人[54 ] 硅橡胶:M4601 软光刻,3D打印 丁烷燃料电池 跳跃 机械鳗鱼[68 ] 硅橡胶:Ecoflex 0030,Dragon Skin 0010 软光刻,3D打印 齿轮泵 游动 SMA四足机器人[69 ] SMA、导热弹性体 − 锂聚合物电池 跑动 介电弹性体驱动鳐鱼[70 ] PDMS:Sylgard 184;水凝胶 模具铸造法 介电弹性体 鳐:游动 仿生蚯蚓[71 ] SMA、聚醚醚酮树脂 − 锂聚合物电池 蚯蚓:蠕动 DE驱动乌贼[72 ] 介电弹性体 − 锂聚合物电池 乌贼:喷射前进
2.2. 制造方法 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
... 水陆两栖生物和水生生物的游泳动作有较大差异,例如青蛙游泳时前肢一直往后划,2条腿重复蹬、并、收的动作. 仿照青蛙游泳设计的由铰接式气动软执行器驱动的仿生青蛙,依靠独特的腿部设计,整体结构紧凑、轻便,能够实现连续的蛙泳式前进和转向[35 ] (见图10(f) ). 对章鱼、海星这类水下行走生物的运动姿态也较特殊,它们通过触腕配合并借助水流可以在水下崎岖地形前进,看起来就像行走一样. 仿照海星爬行的水下机器人利用外部摄像机跟踪机器人上的彩色标记点以提供反馈,可以让机器人准确地接近目标位置,让软体机器人向着更高层次的智能化迈出了重要一步[28 ] (见图10(g) ). 对以水下生物、水陆两栖生物的运动方式为仿生灵感的软体机器人进行集成化设计是十分必要的,如果通过系缆供给能量,势必会影响水下机器人的运动效果;同时,在复杂的水下环境中,系缆本身极易缠绕,也会被其他水下生物触碰. 对如图10 所示的集成化智能软体机器人从能量来源、多维空间运动、反馈控制运动等多个方面进行研究,给后续水下机器人的设计提供了多种思路. ...
... 在外部传统传感器的使用上,软体机器人和刚性机器人相同,例如流体驱动仿生鱼安装了微型摄像头、深度传感器和惯性测量单元[25 ] ,如图11(a) 所示;六足行走机器人在双目摄像头的基础上使用英特尔的四核处理器来提供足够的计算资源来实现人工智能功能,例如导航、物体检测和识别、面部识别甚至语言交互[33 ] . 如图11(b) 所示,Patterson等[28 ] 通过在仿生海星上添加颜色标记,然后用外部环境中的摄像机提供视觉反馈,仿生海星通过计算能够逐步运动到指定位置. 如图11(c) 所示,Yang等[72 ] 将利用摄像头收集的信息通过机器学习优化介电弹性体驱动乌贼的运动控制策略,强化学习后机器人的运动速度提升了91%. 可以说机器学习的调整效率远高于人手动调整,这种基于视觉的捕捉系统给后续集成化软体机器人提供了较好的优化思路. 这意味着软体机器人向着更高的智能化迈进,但未来除了传统的传感器外,也需要更多的新型柔性传感器提供信息. ...
软体机器人驱动研究现状
1
2018
... 集成化智能软体机器人须独立自主地完成任务,而在磁、热、光等环境场下,利用磁性结构或其他智能材料驱动的软体机器人须人为施加环境场,而不是软体机器人本身驱动自身运动,所以以上驱动方式的软体机器人均不在集成化智能软体机器人的范畴内. 根据驱动原理的不同,可以将集成化智能软体机器人的驱动方式分为流体驱动、智能材料驱动和化学反应驱动[29 ] . ...
软体机器人驱动研究现状
1
2018
... 集成化智能软体机器人须独立自主地完成任务,而在磁、热、光等环境场下,利用磁性结构或其他智能材料驱动的软体机器人须人为施加环境场,而不是软体机器人本身驱动自身运动,所以以上驱动方式的软体机器人均不在集成化智能软体机器人的范畴内. 根据驱动原理的不同,可以将集成化智能软体机器人的驱动方式分为流体驱动、智能材料驱动和化学反应驱动[29 ] . ...
气压驱动软体机器人运动研究
2
2017
... 流体驱动是软体机器人中使用最广泛的驱动方式,通过将驱动液体或驱动气体施加到柔软基体中引起局部变形,响应快速,并且只受到材料的机械结构强度的限制[30 ] . 流体驱动方式具有较大的工作负荷、可逆性和可控性,通过在气腔周围设置不同弹性模量的材料,可以让软执行器的变形方式更加多样化[31 ] . 流体驱动的软体机器人,能量介质为液体或空气,可以外接液压泵、气泵或高压气瓶来加压. 自然环境中的空气具备易获取、质量轻、无污染的优点,因此气动系统的选用通常优先于液压系统. 在制造和实验过程中,初步检验流体驱动执行器效果的方法也很简单,使用注射器注入、吸出流体就能形成腔室的正负压强. ...
... 如图5(a) 所示,利用硅橡胶制备4个双向流动弹性体驱动器,串联起来构成集成智能化仿生蛇的身体[32 ] . 在模仿蛇、鱼、蠕虫等周期性扭曲身体的动作时,研究人员将执行器制作成对称双腔结构,让流体规律地双向流动达到摆动的效果. 利用相同的思路,使用Ecoflex 0030(硅橡胶)串联4个双向弯曲的Dragon Skin 0010(硅橡胶)驱动器,可以在水中波状游动,形似鳗鱼[68 ] . 在设计滚动机器人前,研究人员首先测试了如图5(b) 所示的硅橡胶制作的双向流体驱动器组合后的弯曲效果,确保6个驱动器在呈圆周排列时,能够实现滚动前进[49 ] . 如图5(c) 所示为仿生乌贼[36 -37 ] 上鱼鳍在展开状态和折叠状态的示意图,展开状态通常在喷射前进和滑翔阶段使用,折叠状态则在入水时使用,硅橡胶不仅提供给鱼鳍较好的弯折能力,也在受到阻力时提供了足够的韧性. 硅橡胶和PDMS还可以包裹在智能驱动材料外部,保护SMA和IPMC在外界冲击下不会损坏,如图5(d) 所示为集成化仿生海星使用的硅橡胶包裹SMA软执行器. 一些研究组在集成化智能软体机器人的材料设计上以弹性体高分子材料作基底,同时使用纤维材料进行增强,并在一侧加入不可延展的材料作为应变限制层,好比是动物的韧带[30 ] ,限制着运动范围,机器人在能量释放后被动地恢复原状. 应变限制层使用的材料不是绝对的,只要与延展层材料弹性区分明显,容易黏合即可. Fan等[35 ] 用纤维缠绕硅橡胶制作执行器,并在外侧嵌合应变限制层限制运动范围,执行器在压力释放后被动地恢复弯曲,如图5(e) 所示. 值得一提的是,大部分软体执行器都是在加压时发生弯曲,而这一组恰恰相反,在加压时执行器弯曲角度大幅减小,能够更好地模仿青蛙的蹬腿动作. ...
气压驱动软体机器人运动研究
2
2017
... 流体驱动是软体机器人中使用最广泛的驱动方式,通过将驱动液体或驱动气体施加到柔软基体中引起局部变形,响应快速,并且只受到材料的机械结构强度的限制[30 ] . 流体驱动方式具有较大的工作负荷、可逆性和可控性,通过在气腔周围设置不同弹性模量的材料,可以让软执行器的变形方式更加多样化[31 ] . 流体驱动的软体机器人,能量介质为液体或空气,可以外接液压泵、气泵或高压气瓶来加压. 自然环境中的空气具备易获取、质量轻、无污染的优点,因此气动系统的选用通常优先于液压系统. 在制造和实验过程中,初步检验流体驱动执行器效果的方法也很简单,使用注射器注入、吸出流体就能形成腔室的正负压强. ...
... 如图5(a) 所示,利用硅橡胶制备4个双向流动弹性体驱动器,串联起来构成集成智能化仿生蛇的身体[32 ] . 在模仿蛇、鱼、蠕虫等周期性扭曲身体的动作时,研究人员将执行器制作成对称双腔结构,让流体规律地双向流动达到摆动的效果. 利用相同的思路,使用Ecoflex 0030(硅橡胶)串联4个双向弯曲的Dragon Skin 0010(硅橡胶)驱动器,可以在水中波状游动,形似鳗鱼[68 ] . 在设计滚动机器人前,研究人员首先测试了如图5(b) 所示的硅橡胶制作的双向流体驱动器组合后的弯曲效果,确保6个驱动器在呈圆周排列时,能够实现滚动前进[49 ] . 如图5(c) 所示为仿生乌贼[36 -37 ] 上鱼鳍在展开状态和折叠状态的示意图,展开状态通常在喷射前进和滑翔阶段使用,折叠状态则在入水时使用,硅橡胶不仅提供给鱼鳍较好的弯折能力,也在受到阻力时提供了足够的韧性. 硅橡胶和PDMS还可以包裹在智能驱动材料外部,保护SMA和IPMC在外界冲击下不会损坏,如图5(d) 所示为集成化仿生海星使用的硅橡胶包裹SMA软执行器. 一些研究组在集成化智能软体机器人的材料设计上以弹性体高分子材料作基底,同时使用纤维材料进行增强,并在一侧加入不可延展的材料作为应变限制层,好比是动物的韧带[30 ] ,限制着运动范围,机器人在能量释放后被动地恢复原状. 应变限制层使用的材料不是绝对的,只要与延展层材料弹性区分明显,容易黏合即可. Fan等[35 ] 用纤维缠绕硅橡胶制作执行器,并在外侧嵌合应变限制层限制运动范围,执行器在压力释放后被动地恢复弯曲,如图5(e) 所示. 值得一提的是,大部分软体执行器都是在加压时发生弯曲,而这一组恰恰相反,在加压时执行器弯曲角度大幅减小,能够更好地模仿青蛙的蹬腿动作. ...
Elastic inflatable actuators for soft robotic applications
1
2017
... 流体驱动是软体机器人中使用最广泛的驱动方式,通过将驱动液体或驱动气体施加到柔软基体中引起局部变形,响应快速,并且只受到材料的机械结构强度的限制[30 ] . 流体驱动方式具有较大的工作负荷、可逆性和可控性,通过在气腔周围设置不同弹性模量的材料,可以让软执行器的变形方式更加多样化[31 ] . 流体驱动的软体机器人,能量介质为液体或空气,可以外接液压泵、气泵或高压气瓶来加压. 自然环境中的空气具备易获取、质量轻、无污染的优点,因此气动系统的选用通常优先于液压系统. 在制造和实验过程中,初步检验流体驱动执行器效果的方法也很简单,使用注射器注入、吸出流体就能形成腔室的正负压强. ...
Autonomous undulatory serpentine locomotion utilizing body dynamics of a fluidic soft robot
4
2013
... 集成化智能软体机器人为了实现结构上的集成化设计,通常将微型气泵[21 , 32 -34 ] 或小型高压CO2 气瓶[35 ] 设计在结构内部,形成完整独立的整体. 这2种方法各有利弊,微型气泵能够提供持续稳定的流体压力,但是须将供电电池同时集成到整体中. 小型高压CO2 气瓶虽然没有电池的限制,但是气瓶提供的气体压力会随气体损失而下降,在使用后须再次补充. 如图2(a) 所示为Hou等[36 -37 ] 研发的仿生飞行乌贼,利用高压CO2 气瓶喷出气体推动机器人从水中飞到空中,但是这种飞行是一次性的,须再次给气瓶充气才能再次工作. 同样,Fan等[35 ] 研发的仿生青蛙因为高压气瓶中的气体有限只能完成数个动作周期. Katzschmann等[25 ] 则利用微型液压泵让液体介质在仿生鱼尾的2个内腔中以闭环的方式流动,既实现了仿生鱼尾左右摆动的动作,又解决了工作周期短的问题,如图2(b) 所示. ...
... 如图5(a) 所示,利用硅橡胶制备4个双向流动弹性体驱动器,串联起来构成集成智能化仿生蛇的身体[32 ] . 在模仿蛇、鱼、蠕虫等周期性扭曲身体的动作时,研究人员将执行器制作成对称双腔结构,让流体规律地双向流动达到摆动的效果. 利用相同的思路,使用Ecoflex 0030(硅橡胶)串联4个双向弯曲的Dragon Skin 0010(硅橡胶)驱动器,可以在水中波状游动,形似鳗鱼[68 ] . 在设计滚动机器人前,研究人员首先测试了如图5(b) 所示的硅橡胶制作的双向流体驱动器组合后的弯曲效果,确保6个驱动器在呈圆周排列时,能够实现滚动前进[49 ] . 如图5(c) 所示为仿生乌贼[36 -37 ] 上鱼鳍在展开状态和折叠状态的示意图,展开状态通常在喷射前进和滑翔阶段使用,折叠状态则在入水时使用,硅橡胶不仅提供给鱼鳍较好的弯折能力,也在受到阻力时提供了足够的韧性. 硅橡胶和PDMS还可以包裹在智能驱动材料外部,保护SMA和IPMC在外界冲击下不会损坏,如图5(d) 所示为集成化仿生海星使用的硅橡胶包裹SMA软执行器. 一些研究组在集成化智能软体机器人的材料设计上以弹性体高分子材料作基底,同时使用纤维材料进行增强,并在一侧加入不可延展的材料作为应变限制层,好比是动物的韧带[30 ] ,限制着运动范围,机器人在能量释放后被动地恢复原状. 应变限制层使用的材料不是绝对的,只要与延展层材料弹性区分明显,容易黏合即可. Fan等[35 ] 用纤维缠绕硅橡胶制作执行器,并在外侧嵌合应变限制层限制运动范围,执行器在压力释放后被动地恢复弯曲,如图5(e) 所示. 值得一提的是,大部分软体执行器都是在加压时发生弯曲,而这一组恰恰相反,在加压时执行器弯曲角度大幅减小,能够更好地模仿青蛙的蹬腿动作. ...
... Material,production,energy source and movement posture of integrated intelligent soft robots
Tab.1 名称 材料 制造工艺 能量来源 运动方式 四足爬行机器人[23 ] 硅橡胶:Elastosil M4601,Ecoflex 0030 软光刻 微型气泵 海星:爬行 流体驱动仿生鱼[25 ] 硅橡胶:Mold Star 15 模具铸造法 微型液压泵 鱼:游动 仿生海星[28 ] 硅橡胶:Dragonskin 10;SMA 铸造法,3D打印 锂聚合物电池 海星:水下行走 仿生蛇[32 ] 硅橡胶 模具铸造法 微型气泵 蛇:爬行 六足行走机器人[33 ] 硅橡胶:Ecoflex 30 模具铸造法 微型气泵 行走 仿蛇爬行机器人[34 ] 硅橡胶:Ecoflex 0030 激光切割,模具铸造法 微型气泵 蛇:爬行 仿生青蛙[35 ] 硅橡胶:Ecoflex 0050;PDMS:Sylgard 184 模具铸造法,3D打印 高压CO2 气瓶 青蛙:游动 仿生乌贼[36 ] 硅橡胶:Ecoflex 0030 模具铸造法,3D打印 高压CO2 气瓶 乌贼:喷射前进 机械鳐鱼[43 ] SMA;聚氯乙烯 − 锂聚合物电池 鳐:游动 仿生水蛇[44 ] SMA;聚氨酯 − 锂聚合物电池 蛇:游动 IPMC驱动仿生鱼[45 ] IPMC − 锂聚合物电池 鱼:游动 仿生蝠鲼[47 ] IPMC;PDMS 模具铸造法 锂聚合物电池 蝠鲼:游动 仿生魔鬼鱼[48 ] IPMC;PDMS 模具铸造法,3D打印 锂聚合物电池 魔鬼鱼:游动 滚动机器人[49 ] 硅橡胶:Ecoflex 0030 模具铸造法 过氧化氢电池 滚动 多次跳跃机器人[50 ] 类橡胶 3D打印 丁烷燃料电池 跳跃 Octopus[52 ] 硅橡胶:Ecoflex 30;PDMS:Sylgard 184 模具铸造法,软光刻,3D打印,激光切割 过氧化氢电池 章鱼:抬腿 仿生狮子鱼[53 ] 硅橡胶:Dragonskin 20;石墨 模具铸造法,3D打印 碘化锌电池液 鱼:游动 单次跳跃机器人[54 ] 硅橡胶:M4601 软光刻,3D打印 丁烷燃料电池 跳跃 机械鳗鱼[68 ] 硅橡胶:Ecoflex 0030,Dragon Skin 0010 软光刻,3D打印 齿轮泵 游动 SMA四足机器人[69 ] SMA、导热弹性体 − 锂聚合物电池 跑动 介电弹性体驱动鳐鱼[70 ] PDMS:Sylgard 184;水凝胶 模具铸造法 介电弹性体 鳐:游动 仿生蚯蚓[71 ] SMA、聚醚醚酮树脂 − 锂聚合物电池 蚯蚓:蠕动 DE驱动乌贼[72 ] 介电弹性体 − 锂聚合物电池 乌贼:喷射前进
2.2. 制造方法 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
... 铸造技术是上述4类主要制造工艺中最简单常见的. 利用计算机辅助软件设计模具,然后3D打印或切削加工来制备模具[74 ] ;在模具中倒入液态弹性材料,在适当温度下烘烤/光照[49 , 75 ] . 为了封闭流体通道,须将开放通道件胶合到扁平膜上,黏合的部分涂抹相同液态弹性材料,再次烘烤或光照. 为了让弹性执行器在加压时达到理想的弯曲效果,常在固化时在执行器一侧加入不可延展的材料. 集成化设计的流体驱动仿生鱼[25 ] 、仿生蛇[32 ] 、六足行走机器人[33 ] 、滚动机器人[49 ] 、仿生青蛙[35 ] 等在制作软执行器时都使用了铸造法. 如图6 所示为流体驱动仿生鱼的鱼尾部分采用铸造法的制作过程,首先用模具铸造出鱼尾的三部分,然后组装胶合起来. 铸造法的应用虽然普遍,但在加工前有很多设计和模具制造的工作,且弹性材料也有凝固过程,所以总体花费时间较长. ...
Versatile and dexterous soft robotic leg system for untethered operations
4
2016
... Material,production,energy source and movement posture of integrated intelligent soft robots
Tab.1 名称 材料 制造工艺 能量来源 运动方式 四足爬行机器人[23 ] 硅橡胶:Elastosil M4601,Ecoflex 0030 软光刻 微型气泵 海星:爬行 流体驱动仿生鱼[25 ] 硅橡胶:Mold Star 15 模具铸造法 微型液压泵 鱼:游动 仿生海星[28 ] 硅橡胶:Dragonskin 10;SMA 铸造法,3D打印 锂聚合物电池 海星:水下行走 仿生蛇[32 ] 硅橡胶 模具铸造法 微型气泵 蛇:爬行 六足行走机器人[33 ] 硅橡胶:Ecoflex 30 模具铸造法 微型气泵 行走 仿蛇爬行机器人[34 ] 硅橡胶:Ecoflex 0030 激光切割,模具铸造法 微型气泵 蛇:爬行 仿生青蛙[35 ] 硅橡胶:Ecoflex 0050;PDMS:Sylgard 184 模具铸造法,3D打印 高压CO2 气瓶 青蛙:游动 仿生乌贼[36 ] 硅橡胶:Ecoflex 0030 模具铸造法,3D打印 高压CO2 气瓶 乌贼:喷射前进 机械鳐鱼[43 ] SMA;聚氯乙烯 − 锂聚合物电池 鳐:游动 仿生水蛇[44 ] SMA;聚氨酯 − 锂聚合物电池 蛇:游动 IPMC驱动仿生鱼[45 ] IPMC − 锂聚合物电池 鱼:游动 仿生蝠鲼[47 ] IPMC;PDMS 模具铸造法 锂聚合物电池 蝠鲼:游动 仿生魔鬼鱼[48 ] IPMC;PDMS 模具铸造法,3D打印 锂聚合物电池 魔鬼鱼:游动 滚动机器人[49 ] 硅橡胶:Ecoflex 0030 模具铸造法 过氧化氢电池 滚动 多次跳跃机器人[50 ] 类橡胶 3D打印 丁烷燃料电池 跳跃 Octopus[52 ] 硅橡胶:Ecoflex 30;PDMS:Sylgard 184 模具铸造法,软光刻,3D打印,激光切割 过氧化氢电池 章鱼:抬腿 仿生狮子鱼[53 ] 硅橡胶:Dragonskin 20;石墨 模具铸造法,3D打印 碘化锌电池液 鱼:游动 单次跳跃机器人[54 ] 硅橡胶:M4601 软光刻,3D打印 丁烷燃料电池 跳跃 机械鳗鱼[68 ] 硅橡胶:Ecoflex 0030,Dragon Skin 0010 软光刻,3D打印 齿轮泵 游动 SMA四足机器人[69 ] SMA、导热弹性体 − 锂聚合物电池 跑动 介电弹性体驱动鳐鱼[70 ] PDMS:Sylgard 184;水凝胶 模具铸造法 介电弹性体 鳐:游动 仿生蚯蚓[71 ] SMA、聚醚醚酮树脂 − 锂聚合物电池 蚯蚓:蠕动 DE驱动乌贼[72 ] 介电弹性体 − 锂聚合物电池 乌贼:喷射前进
2.2. 制造方法 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
... 铸造技术是上述4类主要制造工艺中最简单常见的. 利用计算机辅助软件设计模具,然后3D打印或切削加工来制备模具[74 ] ;在模具中倒入液态弹性材料,在适当温度下烘烤/光照[49 , 75 ] . 为了封闭流体通道,须将开放通道件胶合到扁平膜上,黏合的部分涂抹相同液态弹性材料,再次烘烤或光照. 为了让弹性执行器在加压时达到理想的弯曲效果,常在固化时在执行器一侧加入不可延展的材料. 集成化设计的流体驱动仿生鱼[25 ] 、仿生蛇[32 ] 、六足行走机器人[33 ] 、滚动机器人[49 ] 、仿生青蛙[35 ] 等在制作软执行器时都使用了铸造法. 如图6 所示为流体驱动仿生鱼的鱼尾部分采用铸造法的制作过程,首先用模具铸造出鱼尾的三部分,然后组装胶合起来. 铸造法的应用虽然普遍,但在加工前有很多设计和模具制造的工作,且弹性材料也有凝固过程,所以总体花费时间较长. ...
... 研究人员仿照蛇的鳞片,用激光切割出折纸图案的塑料片,再将塑料片呈三棱柱状包裹在软执行器、微型气泵及控制器上,形成自主爬行的机器蛇,并研究这种特殊皮肤的摩擦性能[34 ] (见图9(a) ). 除了仿蛇运动的机器人外,各种四足爬行机器人也被广泛研究. 在有系缆四足软体机器人[13 ] 的基础上,通过集成微型气泵、电池、阀门和自主控制所需的控制器,设计新型四足爬行机器人,利用硅橡胶与生俱来的弹性,机器人可以抵抗各种不利的环境条件,包括下雪、积水、暴露于火焰甚至被重物碾压[23 ] (见图9(b) ). 另一种嵌入SMA的四足机器人,能够在包括上坡、岩石地形的各种地面上爬行,还能够爬上大于其身高一半的台阶. 与其他行走类软体机器人相比,SMA四足机器人中材料、控制装置、电源和致动装置的紧密集成降低了硬件的复杂性、尺寸和重量,外观上看上去十分简洁[69 ] (见图9(c) ). Waynelovich等[33 ] 设计的六足机器人的每条腿均由3个软执行器构成,通过执行器的组合工作可以实现前行、转向动作,这是利用增加执行器数量来提高自由度的方法(见图9(d) ). ...
... 在外部传统传感器的使用上,软体机器人和刚性机器人相同,例如流体驱动仿生鱼安装了微型摄像头、深度传感器和惯性测量单元[25 ] ,如图11(a) 所示;六足行走机器人在双目摄像头的基础上使用英特尔的四核处理器来提供足够的计算资源来实现人工智能功能,例如导航、物体检测和识别、面部识别甚至语言交互[33 ] . 如图11(b) 所示,Patterson等[28 ] 通过在仿生海星上添加颜色标记,然后用外部环境中的摄像机提供视觉反馈,仿生海星通过计算能够逐步运动到指定位置. 如图11(c) 所示,Yang等[72 ] 将利用摄像头收集的信息通过机器学习优化介电弹性体驱动乌贼的运动控制策略,强化学习后机器人的运动速度提升了91%. 可以说机器学习的调整效率远高于人手动调整,这种基于视觉的捕捉系统给后续集成化软体机器人提供了较好的优化思路. 这意味着软体机器人向着更高的智能化迈进,但未来除了传统的传感器外,也需要更多的新型柔性传感器提供信息. ...
Kirigami skins make a simple soft actuator crawl
3
2018
... 集成化智能软体机器人为了实现结构上的集成化设计,通常将微型气泵[21 , 32 -34 ] 或小型高压CO2 气瓶[35 ] 设计在结构内部,形成完整独立的整体. 这2种方法各有利弊,微型气泵能够提供持续稳定的流体压力,但是须将供电电池同时集成到整体中. 小型高压CO2 气瓶虽然没有电池的限制,但是气瓶提供的气体压力会随气体损失而下降,在使用后须再次补充. 如图2(a) 所示为Hou等[36 -37 ] 研发的仿生飞行乌贼,利用高压CO2 气瓶喷出气体推动机器人从水中飞到空中,但是这种飞行是一次性的,须再次给气瓶充气才能再次工作. 同样,Fan等[35 ] 研发的仿生青蛙因为高压气瓶中的气体有限只能完成数个动作周期. Katzschmann等[25 ] 则利用微型液压泵让液体介质在仿生鱼尾的2个内腔中以闭环的方式流动,既实现了仿生鱼尾左右摆动的动作,又解决了工作周期短的问题,如图2(b) 所示. ...
... Material,production,energy source and movement posture of integrated intelligent soft robots
Tab.1 名称 材料 制造工艺 能量来源 运动方式 四足爬行机器人[23 ] 硅橡胶:Elastosil M4601,Ecoflex 0030 软光刻 微型气泵 海星:爬行 流体驱动仿生鱼[25 ] 硅橡胶:Mold Star 15 模具铸造法 微型液压泵 鱼:游动 仿生海星[28 ] 硅橡胶:Dragonskin 10;SMA 铸造法,3D打印 锂聚合物电池 海星:水下行走 仿生蛇[32 ] 硅橡胶 模具铸造法 微型气泵 蛇:爬行 六足行走机器人[33 ] 硅橡胶:Ecoflex 30 模具铸造法 微型气泵 行走 仿蛇爬行机器人[34 ] 硅橡胶:Ecoflex 0030 激光切割,模具铸造法 微型气泵 蛇:爬行 仿生青蛙[35 ] 硅橡胶:Ecoflex 0050;PDMS:Sylgard 184 模具铸造法,3D打印 高压CO2 气瓶 青蛙:游动 仿生乌贼[36 ] 硅橡胶:Ecoflex 0030 模具铸造法,3D打印 高压CO2 气瓶 乌贼:喷射前进 机械鳐鱼[43 ] SMA;聚氯乙烯 − 锂聚合物电池 鳐:游动 仿生水蛇[44 ] SMA;聚氨酯 − 锂聚合物电池 蛇:游动 IPMC驱动仿生鱼[45 ] IPMC − 锂聚合物电池 鱼:游动 仿生蝠鲼[47 ] IPMC;PDMS 模具铸造法 锂聚合物电池 蝠鲼:游动 仿生魔鬼鱼[48 ] IPMC;PDMS 模具铸造法,3D打印 锂聚合物电池 魔鬼鱼:游动 滚动机器人[49 ] 硅橡胶:Ecoflex 0030 模具铸造法 过氧化氢电池 滚动 多次跳跃机器人[50 ] 类橡胶 3D打印 丁烷燃料电池 跳跃 Octopus[52 ] 硅橡胶:Ecoflex 30;PDMS:Sylgard 184 模具铸造法,软光刻,3D打印,激光切割 过氧化氢电池 章鱼:抬腿 仿生狮子鱼[53 ] 硅橡胶:Dragonskin 20;石墨 模具铸造法,3D打印 碘化锌电池液 鱼:游动 单次跳跃机器人[54 ] 硅橡胶:M4601 软光刻,3D打印 丁烷燃料电池 跳跃 机械鳗鱼[68 ] 硅橡胶:Ecoflex 0030,Dragon Skin 0010 软光刻,3D打印 齿轮泵 游动 SMA四足机器人[69 ] SMA、导热弹性体 − 锂聚合物电池 跑动 介电弹性体驱动鳐鱼[70 ] PDMS:Sylgard 184;水凝胶 模具铸造法 介电弹性体 鳐:游动 仿生蚯蚓[71 ] SMA、聚醚醚酮树脂 − 锂聚合物电池 蚯蚓:蠕动 DE驱动乌贼[72 ] 介电弹性体 − 锂聚合物电池 乌贼:喷射前进
2.2. 制造方法 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
... 研究人员仿照蛇的鳞片,用激光切割出折纸图案的塑料片,再将塑料片呈三棱柱状包裹在软执行器、微型气泵及控制器上,形成自主爬行的机器蛇,并研究这种特殊皮肤的摩擦性能[34 ] (见图9(a) ). 除了仿蛇运动的机器人外,各种四足爬行机器人也被广泛研究. 在有系缆四足软体机器人[13 ] 的基础上,通过集成微型气泵、电池、阀门和自主控制所需的控制器,设计新型四足爬行机器人,利用硅橡胶与生俱来的弹性,机器人可以抵抗各种不利的环境条件,包括下雪、积水、暴露于火焰甚至被重物碾压[23 ] (见图9(b) ). 另一种嵌入SMA的四足机器人,能够在包括上坡、岩石地形的各种地面上爬行,还能够爬上大于其身高一半的台阶. 与其他行走类软体机器人相比,SMA四足机器人中材料、控制装置、电源和致动装置的紧密集成降低了硬件的复杂性、尺寸和重量,外观上看上去十分简洁[69 ] (见图9(c) ). Waynelovich等[33 ] 设计的六足机器人的每条腿均由3个软执行器构成,通过执行器的组合工作可以实现前行、转向动作,这是利用增加执行器数量来提高自由度的方法(见图9(d) ). ...
Swimming performance of the frog-inspired soft robot
6
2020
... 集成化智能软体机器人为了实现结构上的集成化设计,通常将微型气泵[21 , 32 -34 ] 或小型高压CO2 气瓶[35 ] 设计在结构内部,形成完整独立的整体. 这2种方法各有利弊,微型气泵能够提供持续稳定的流体压力,但是须将供电电池同时集成到整体中. 小型高压CO2 气瓶虽然没有电池的限制,但是气瓶提供的气体压力会随气体损失而下降,在使用后须再次补充. 如图2(a) 所示为Hou等[36 -37 ] 研发的仿生飞行乌贼,利用高压CO2 气瓶喷出气体推动机器人从水中飞到空中,但是这种飞行是一次性的,须再次给气瓶充气才能再次工作. 同样,Fan等[35 ] 研发的仿生青蛙因为高压气瓶中的气体有限只能完成数个动作周期. Katzschmann等[25 ] 则利用微型液压泵让液体介质在仿生鱼尾的2个内腔中以闭环的方式流动,既实现了仿生鱼尾左右摆动的动作,又解决了工作周期短的问题,如图2(b) 所示. ...
... [35 ]研发的仿生青蛙因为高压气瓶中的气体有限只能完成数个动作周期. Katzschmann等[25 ] 则利用微型液压泵让液体介质在仿生鱼尾的2个内腔中以闭环的方式流动,既实现了仿生鱼尾左右摆动的动作,又解决了工作周期短的问题,如图2(b) 所示. ...
... 如图5(a) 所示,利用硅橡胶制备4个双向流动弹性体驱动器,串联起来构成集成智能化仿生蛇的身体[32 ] . 在模仿蛇、鱼、蠕虫等周期性扭曲身体的动作时,研究人员将执行器制作成对称双腔结构,让流体规律地双向流动达到摆动的效果. 利用相同的思路,使用Ecoflex 0030(硅橡胶)串联4个双向弯曲的Dragon Skin 0010(硅橡胶)驱动器,可以在水中波状游动,形似鳗鱼[68 ] . 在设计滚动机器人前,研究人员首先测试了如图5(b) 所示的硅橡胶制作的双向流体驱动器组合后的弯曲效果,确保6个驱动器在呈圆周排列时,能够实现滚动前进[49 ] . 如图5(c) 所示为仿生乌贼[36 -37 ] 上鱼鳍在展开状态和折叠状态的示意图,展开状态通常在喷射前进和滑翔阶段使用,折叠状态则在入水时使用,硅橡胶不仅提供给鱼鳍较好的弯折能力,也在受到阻力时提供了足够的韧性. 硅橡胶和PDMS还可以包裹在智能驱动材料外部,保护SMA和IPMC在外界冲击下不会损坏,如图5(d) 所示为集成化仿生海星使用的硅橡胶包裹SMA软执行器. 一些研究组在集成化智能软体机器人的材料设计上以弹性体高分子材料作基底,同时使用纤维材料进行增强,并在一侧加入不可延展的材料作为应变限制层,好比是动物的韧带[30 ] ,限制着运动范围,机器人在能量释放后被动地恢复原状. 应变限制层使用的材料不是绝对的,只要与延展层材料弹性区分明显,容易黏合即可. Fan等[35 ] 用纤维缠绕硅橡胶制作执行器,并在外侧嵌合应变限制层限制运动范围,执行器在压力释放后被动地恢复弯曲,如图5(e) 所示. 值得一提的是,大部分软体执行器都是在加压时发生弯曲,而这一组恰恰相反,在加压时执行器弯曲角度大幅减小,能够更好地模仿青蛙的蹬腿动作. ...
... Material,production,energy source and movement posture of integrated intelligent soft robots
Tab.1 名称 材料 制造工艺 能量来源 运动方式 四足爬行机器人[23 ] 硅橡胶:Elastosil M4601,Ecoflex 0030 软光刻 微型气泵 海星:爬行 流体驱动仿生鱼[25 ] 硅橡胶:Mold Star 15 模具铸造法 微型液压泵 鱼:游动 仿生海星[28 ] 硅橡胶:Dragonskin 10;SMA 铸造法,3D打印 锂聚合物电池 海星:水下行走 仿生蛇[32 ] 硅橡胶 模具铸造法 微型气泵 蛇:爬行 六足行走机器人[33 ] 硅橡胶:Ecoflex 30 模具铸造法 微型气泵 行走 仿蛇爬行机器人[34 ] 硅橡胶:Ecoflex 0030 激光切割,模具铸造法 微型气泵 蛇:爬行 仿生青蛙[35 ] 硅橡胶:Ecoflex 0050;PDMS:Sylgard 184 模具铸造法,3D打印 高压CO2 气瓶 青蛙:游动 仿生乌贼[36 ] 硅橡胶:Ecoflex 0030 模具铸造法,3D打印 高压CO2 气瓶 乌贼:喷射前进 机械鳐鱼[43 ] SMA;聚氯乙烯 − 锂聚合物电池 鳐:游动 仿生水蛇[44 ] SMA;聚氨酯 − 锂聚合物电池 蛇:游动 IPMC驱动仿生鱼[45 ] IPMC − 锂聚合物电池 鱼:游动 仿生蝠鲼[47 ] IPMC;PDMS 模具铸造法 锂聚合物电池 蝠鲼:游动 仿生魔鬼鱼[48 ] IPMC;PDMS 模具铸造法,3D打印 锂聚合物电池 魔鬼鱼:游动 滚动机器人[49 ] 硅橡胶:Ecoflex 0030 模具铸造法 过氧化氢电池 滚动 多次跳跃机器人[50 ] 类橡胶 3D打印 丁烷燃料电池 跳跃 Octopus[52 ] 硅橡胶:Ecoflex 30;PDMS:Sylgard 184 模具铸造法,软光刻,3D打印,激光切割 过氧化氢电池 章鱼:抬腿 仿生狮子鱼[53 ] 硅橡胶:Dragonskin 20;石墨 模具铸造法,3D打印 碘化锌电池液 鱼:游动 单次跳跃机器人[54 ] 硅橡胶:M4601 软光刻,3D打印 丁烷燃料电池 跳跃 机械鳗鱼[68 ] 硅橡胶:Ecoflex 0030,Dragon Skin 0010 软光刻,3D打印 齿轮泵 游动 SMA四足机器人[69 ] SMA、导热弹性体 − 锂聚合物电池 跑动 介电弹性体驱动鳐鱼[70 ] PDMS:Sylgard 184;水凝胶 模具铸造法 介电弹性体 鳐:游动 仿生蚯蚓[71 ] SMA、聚醚醚酮树脂 − 锂聚合物电池 蚯蚓:蠕动 DE驱动乌贼[72 ] 介电弹性体 − 锂聚合物电池 乌贼:喷射前进
2.2. 制造方法 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
... 铸造技术是上述4类主要制造工艺中最简单常见的. 利用计算机辅助软件设计模具,然后3D打印或切削加工来制备模具[74 ] ;在模具中倒入液态弹性材料,在适当温度下烘烤/光照[49 , 75 ] . 为了封闭流体通道,须将开放通道件胶合到扁平膜上,黏合的部分涂抹相同液态弹性材料,再次烘烤或光照. 为了让弹性执行器在加压时达到理想的弯曲效果,常在固化时在执行器一侧加入不可延展的材料. 集成化设计的流体驱动仿生鱼[25 ] 、仿生蛇[32 ] 、六足行走机器人[33 ] 、滚动机器人[49 ] 、仿生青蛙[35 ] 等在制作软执行器时都使用了铸造法. 如图6 所示为流体驱动仿生鱼的鱼尾部分采用铸造法的制作过程,首先用模具铸造出鱼尾的三部分,然后组装胶合起来. 铸造法的应用虽然普遍,但在加工前有很多设计和模具制造的工作,且弹性材料也有凝固过程,所以总体花费时间较长. ...
... 水陆两栖生物和水生生物的游泳动作有较大差异,例如青蛙游泳时前肢一直往后划,2条腿重复蹬、并、收的动作. 仿照青蛙游泳设计的由铰接式气动软执行器驱动的仿生青蛙,依靠独特的腿部设计,整体结构紧凑、轻便,能够实现连续的蛙泳式前进和转向[35 ] (见图10(f) ). 对章鱼、海星这类水下行走生物的运动姿态也较特殊,它们通过触腕配合并借助水流可以在水下崎岖地形前进,看起来就像行走一样. 仿照海星爬行的水下机器人利用外部摄像机跟踪机器人上的彩色标记点以提供反馈,可以让机器人准确地接近目标位置,让软体机器人向着更高层次的智能化迈出了重要一步[28 ] (见图10(g) ). 对以水下生物、水陆两栖生物的运动方式为仿生灵感的软体机器人进行集成化设计是十分必要的,如果通过系缆供给能量,势必会影响水下机器人的运动效果;同时,在复杂的水下环境中,系缆本身极易缠绕,也会被其他水下生物触碰. 对如图10 所示的集成化智能软体机器人从能量来源、多维空间运动、反馈控制运动等多个方面进行研究,给后续水下机器人的设计提供了多种思路. ...
Locomotor transition: how squid jet from water to air
3
2020
... 集成化智能软体机器人为了实现结构上的集成化设计,通常将微型气泵[21 , 32 -34 ] 或小型高压CO2 气瓶[35 ] 设计在结构内部,形成完整独立的整体. 这2种方法各有利弊,微型气泵能够提供持续稳定的流体压力,但是须将供电电池同时集成到整体中. 小型高压CO2 气瓶虽然没有电池的限制,但是气瓶提供的气体压力会随气体损失而下降,在使用后须再次补充. 如图2(a) 所示为Hou等[36 -37 ] 研发的仿生飞行乌贼,利用高压CO2 气瓶喷出气体推动机器人从水中飞到空中,但是这种飞行是一次性的,须再次给气瓶充气才能再次工作. 同样,Fan等[35 ] 研发的仿生青蛙因为高压气瓶中的气体有限只能完成数个动作周期. Katzschmann等[25 ] 则利用微型液压泵让液体介质在仿生鱼尾的2个内腔中以闭环的方式流动,既实现了仿生鱼尾左右摆动的动作,又解决了工作周期短的问题,如图2(b) 所示. ...
... 如图5(a) 所示,利用硅橡胶制备4个双向流动弹性体驱动器,串联起来构成集成智能化仿生蛇的身体[32 ] . 在模仿蛇、鱼、蠕虫等周期性扭曲身体的动作时,研究人员将执行器制作成对称双腔结构,让流体规律地双向流动达到摆动的效果. 利用相同的思路,使用Ecoflex 0030(硅橡胶)串联4个双向弯曲的Dragon Skin 0010(硅橡胶)驱动器,可以在水中波状游动,形似鳗鱼[68 ] . 在设计滚动机器人前,研究人员首先测试了如图5(b) 所示的硅橡胶制作的双向流体驱动器组合后的弯曲效果,确保6个驱动器在呈圆周排列时,能够实现滚动前进[49 ] . 如图5(c) 所示为仿生乌贼[36 -37 ] 上鱼鳍在展开状态和折叠状态的示意图,展开状态通常在喷射前进和滑翔阶段使用,折叠状态则在入水时使用,硅橡胶不仅提供给鱼鳍较好的弯折能力,也在受到阻力时提供了足够的韧性. 硅橡胶和PDMS还可以包裹在智能驱动材料外部,保护SMA和IPMC在外界冲击下不会损坏,如图5(d) 所示为集成化仿生海星使用的硅橡胶包裹SMA软执行器. 一些研究组在集成化智能软体机器人的材料设计上以弹性体高分子材料作基底,同时使用纤维材料进行增强,并在一侧加入不可延展的材料作为应变限制层,好比是动物的韧带[30 ] ,限制着运动范围,机器人在能量释放后被动地恢复原状. 应变限制层使用的材料不是绝对的,只要与延展层材料弹性区分明显,容易黏合即可. Fan等[35 ] 用纤维缠绕硅橡胶制作执行器,并在外侧嵌合应变限制层限制运动范围,执行器在压力释放后被动地恢复弯曲,如图5(e) 所示. 值得一提的是,大部分软体执行器都是在加压时发生弯曲,而这一组恰恰相反,在加压时执行器弯曲角度大幅减小,能够更好地模仿青蛙的蹬腿动作. ...
... Material,production,energy source and movement posture of integrated intelligent soft robots
Tab.1 名称 材料 制造工艺 能量来源 运动方式 四足爬行机器人[23 ] 硅橡胶:Elastosil M4601,Ecoflex 0030 软光刻 微型气泵 海星:爬行 流体驱动仿生鱼[25 ] 硅橡胶:Mold Star 15 模具铸造法 微型液压泵 鱼:游动 仿生海星[28 ] 硅橡胶:Dragonskin 10;SMA 铸造法,3D打印 锂聚合物电池 海星:水下行走 仿生蛇[32 ] 硅橡胶 模具铸造法 微型气泵 蛇:爬行 六足行走机器人[33 ] 硅橡胶:Ecoflex 30 模具铸造法 微型气泵 行走 仿蛇爬行机器人[34 ] 硅橡胶:Ecoflex 0030 激光切割,模具铸造法 微型气泵 蛇:爬行 仿生青蛙[35 ] 硅橡胶:Ecoflex 0050;PDMS:Sylgard 184 模具铸造法,3D打印 高压CO2 气瓶 青蛙:游动 仿生乌贼[36 ] 硅橡胶:Ecoflex 0030 模具铸造法,3D打印 高压CO2 气瓶 乌贼:喷射前进 机械鳐鱼[43 ] SMA;聚氯乙烯 − 锂聚合物电池 鳐:游动 仿生水蛇[44 ] SMA;聚氨酯 − 锂聚合物电池 蛇:游动 IPMC驱动仿生鱼[45 ] IPMC − 锂聚合物电池 鱼:游动 仿生蝠鲼[47 ] IPMC;PDMS 模具铸造法 锂聚合物电池 蝠鲼:游动 仿生魔鬼鱼[48 ] IPMC;PDMS 模具铸造法,3D打印 锂聚合物电池 魔鬼鱼:游动 滚动机器人[49 ] 硅橡胶:Ecoflex 0030 模具铸造法 过氧化氢电池 滚动 多次跳跃机器人[50 ] 类橡胶 3D打印 丁烷燃料电池 跳跃 Octopus[52 ] 硅橡胶:Ecoflex 30;PDMS:Sylgard 184 模具铸造法,软光刻,3D打印,激光切割 过氧化氢电池 章鱼:抬腿 仿生狮子鱼[53 ] 硅橡胶:Dragonskin 20;石墨 模具铸造法,3D打印 碘化锌电池液 鱼:游动 单次跳跃机器人[54 ] 硅橡胶:M4601 软光刻,3D打印 丁烷燃料电池 跳跃 机械鳗鱼[68 ] 硅橡胶:Ecoflex 0030,Dragon Skin 0010 软光刻,3D打印 齿轮泵 游动 SMA四足机器人[69 ] SMA、导热弹性体 − 锂聚合物电池 跑动 介电弹性体驱动鳐鱼[70 ] PDMS:Sylgard 184;水凝胶 模具铸造法 介电弹性体 鳐:游动 仿生蚯蚓[71 ] SMA、聚醚醚酮树脂 − 锂聚合物电池 蚯蚓:蠕动 DE驱动乌贼[72 ] 介电弹性体 − 锂聚合物电池 乌贼:喷射前进
2.2. 制造方法 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
2
... 集成化智能软体机器人为了实现结构上的集成化设计,通常将微型气泵[21 , 32 -34 ] 或小型高压CO2 气瓶[35 ] 设计在结构内部,形成完整独立的整体. 这2种方法各有利弊,微型气泵能够提供持续稳定的流体压力,但是须将供电电池同时集成到整体中. 小型高压CO2 气瓶虽然没有电池的限制,但是气瓶提供的气体压力会随气体损失而下降,在使用后须再次补充. 如图2(a) 所示为Hou等[36 -37 ] 研发的仿生飞行乌贼,利用高压CO2 气瓶喷出气体推动机器人从水中飞到空中,但是这种飞行是一次性的,须再次给气瓶充气才能再次工作. 同样,Fan等[35 ] 研发的仿生青蛙因为高压气瓶中的气体有限只能完成数个动作周期. Katzschmann等[25 ] 则利用微型液压泵让液体介质在仿生鱼尾的2个内腔中以闭环的方式流动,既实现了仿生鱼尾左右摆动的动作,又解决了工作周期短的问题,如图2(b) 所示. ...
... 如图5(a) 所示,利用硅橡胶制备4个双向流动弹性体驱动器,串联起来构成集成智能化仿生蛇的身体[32 ] . 在模仿蛇、鱼、蠕虫等周期性扭曲身体的动作时,研究人员将执行器制作成对称双腔结构,让流体规律地双向流动达到摆动的效果. 利用相同的思路,使用Ecoflex 0030(硅橡胶)串联4个双向弯曲的Dragon Skin 0010(硅橡胶)驱动器,可以在水中波状游动,形似鳗鱼[68 ] . 在设计滚动机器人前,研究人员首先测试了如图5(b) 所示的硅橡胶制作的双向流体驱动器组合后的弯曲效果,确保6个驱动器在呈圆周排列时,能够实现滚动前进[49 ] . 如图5(c) 所示为仿生乌贼[36 -37 ] 上鱼鳍在展开状态和折叠状态的示意图,展开状态通常在喷射前进和滑翔阶段使用,折叠状态则在入水时使用,硅橡胶不仅提供给鱼鳍较好的弯折能力,也在受到阻力时提供了足够的韧性. 硅橡胶和PDMS还可以包裹在智能驱动材料外部,保护SMA和IPMC在外界冲击下不会损坏,如图5(d) 所示为集成化仿生海星使用的硅橡胶包裹SMA软执行器. 一些研究组在集成化智能软体机器人的材料设计上以弹性体高分子材料作基底,同时使用纤维材料进行增强,并在一侧加入不可延展的材料作为应变限制层,好比是动物的韧带[30 ] ,限制着运动范围,机器人在能量释放后被动地恢复原状. 应变限制层使用的材料不是绝对的,只要与延展层材料弹性区分明显,容易黏合即可. Fan等[35 ] 用纤维缠绕硅橡胶制作执行器,并在外侧嵌合应变限制层限制运动范围,执行器在压力释放后被动地恢复弯曲,如图5(e) 所示. 值得一提的是,大部分软体执行器都是在加压时发生弯曲,而这一组恰恰相反,在加压时执行器弯曲角度大幅减小,能够更好地模仿青蛙的蹬腿动作. ...
无系留大负载软体抓持机器人研究发展综述
1
2020
... 智能材料利用能够在外部刺激下(光、热、电、磁等)产生变形的物理属性变化来实现驱动功能[38 ] . 软体机器人使用的智能材料主要包括响应性水凝胶、介电弹性聚合物(dielectric elastic polymer,DE)、形状记忆合金(shape memory alloys,SMA)和离子聚合物-金属复合材料(ionic polymer-metal composite,IPMC). 响应性水凝胶在pH值、温度、光等多种外界刺激下能够展现出复杂的响应性溶胀行为,物理变形方式更加多样化. 例如,在特定溶液中能够自我修复的水凝胶构件块具有内部通道和外部连接器,能够堆叠成复杂形状的微流控装置[39 ] ;具有不同终止信息序列的水凝胶在溶胀时也会变成不同的形状[40 ] . 介电弹性聚合物具有较好的驱动力和响应速度,适合应用在快速响应的机器人结构中,例如快速频率跳跃机器人[41 ] 、双脚攀爬机器[16 ] . ...
无系留大负载软体抓持机器人研究发展综述
1
2020
... 智能材料利用能够在外部刺激下(光、热、电、磁等)产生变形的物理属性变化来实现驱动功能[38 ] . 软体机器人使用的智能材料主要包括响应性水凝胶、介电弹性聚合物(dielectric elastic polymer,DE)、形状记忆合金(shape memory alloys,SMA)和离子聚合物-金属复合材料(ionic polymer-metal composite,IPMC). 响应性水凝胶在pH值、温度、光等多种外界刺激下能够展现出复杂的响应性溶胀行为,物理变形方式更加多样化. 例如,在特定溶液中能够自我修复的水凝胶构件块具有内部通道和外部连接器,能够堆叠成复杂形状的微流控装置[39 ] ;具有不同终止信息序列的水凝胶在溶胀时也会变成不同的形状[40 ] . 介电弹性聚合物具有较好的驱动力和响应速度,适合应用在快速响应的机器人结构中,例如快速频率跳跃机器人[41 ] 、双脚攀爬机器[16 ] . ...
3D printed self-adhesive PEGDA-PAA hydrogels as modular components for soft actuators and microfluidics
1
2019
... 智能材料利用能够在外部刺激下(光、热、电、磁等)产生变形的物理属性变化来实现驱动功能[38 ] . 软体机器人使用的智能材料主要包括响应性水凝胶、介电弹性聚合物(dielectric elastic polymer,DE)、形状记忆合金(shape memory alloys,SMA)和离子聚合物-金属复合材料(ionic polymer-metal composite,IPMC). 响应性水凝胶在pH值、温度、光等多种外界刺激下能够展现出复杂的响应性溶胀行为,物理变形方式更加多样化. 例如,在特定溶液中能够自我修复的水凝胶构件块具有内部通道和外部连接器,能够堆叠成复杂形状的微流控装置[39 ] ;具有不同终止信息序列的水凝胶在溶胀时也会变成不同的形状[40 ] . 介电弹性聚合物具有较好的驱动力和响应速度,适合应用在快速响应的机器人结构中,例如快速频率跳跃机器人[41 ] 、双脚攀爬机器[16 ] . ...
DNA sequence-directed shape change of photopatterned hydro gels via high-degree swelling
1
2017
... 智能材料利用能够在外部刺激下(光、热、电、磁等)产生变形的物理属性变化来实现驱动功能[38 ] . 软体机器人使用的智能材料主要包括响应性水凝胶、介电弹性聚合物(dielectric elastic polymer,DE)、形状记忆合金(shape memory alloys,SMA)和离子聚合物-金属复合材料(ionic polymer-metal composite,IPMC). 响应性水凝胶在pH值、温度、光等多种外界刺激下能够展现出复杂的响应性溶胀行为,物理变形方式更加多样化. 例如,在特定溶液中能够自我修复的水凝胶构件块具有内部通道和外部连接器,能够堆叠成复杂形状的微流控装置[39 ] ;具有不同终止信息序列的水凝胶在溶胀时也会变成不同的形状[40 ] . 介电弹性聚合物具有较好的驱动力和响应速度,适合应用在快速响应的机器人结构中,例如快速频率跳跃机器人[41 ] 、双脚攀爬机器[16 ] . ...
Soft and fast hopping-running robot with speed of six times its body length per second
1
2019
... 智能材料利用能够在外部刺激下(光、热、电、磁等)产生变形的物理属性变化来实现驱动功能[38 ] . 软体机器人使用的智能材料主要包括响应性水凝胶、介电弹性聚合物(dielectric elastic polymer,DE)、形状记忆合金(shape memory alloys,SMA)和离子聚合物-金属复合材料(ionic polymer-metal composite,IPMC). 响应性水凝胶在pH值、温度、光等多种外界刺激下能够展现出复杂的响应性溶胀行为,物理变形方式更加多样化. 例如,在特定溶液中能够自我修复的水凝胶构件块具有内部通道和外部连接器,能够堆叠成复杂形状的微流控装置[39 ] ;具有不同终止信息序列的水凝胶在溶胀时也会变成不同的形状[40 ] . 介电弹性聚合物具有较好的驱动力和响应速度,适合应用在快速响应的机器人结构中,例如快速频率跳跃机器人[41 ] 、双脚攀爬机器[16 ] . ...
软体机器人结构机理与驱动材料研究综述
1
2016
... 应用在软体机器人上的智能材料多种多样,但是受到集成化软体机器人的驱动主体是机器人本身的限制,集成化智能软体机器人使用的智能驱动材料多为SMA和IPMC[42 ] . ...
软体机器人结构机理与驱动材料研究综述
1
2016
... 应用在软体机器人上的智能材料多种多样,但是受到集成化软体机器人的驱动主体是机器人本身的限制,集成化智能软体机器人使用的智能驱动材料多为SMA和IPMC[42 ] . ...
4
... SMA是坚固的智能材料,能够在温度和应力作用下发生相变,具有独特的形状记忆效应,同时可以被制成许多形状,例如线、板、管和丝带[43 ] ,更好地用在形状各异的软体机器人中. 集成化智能软体机器人使用的形状记忆合金几乎均为钛镍合金,因为钛镍合金最易制得,同时具有恢复应力高、工作电压低、寿命长等优点. Low等[44 ] 模仿蛇的身体游动前进的姿态,将SMA嵌入高分子聚合物中形成弹性基板,在通电时SMA弯曲,能量被储存在弹性基板中;在停止通电后,能量被释放出来驱动返回运动. 同样,Wang等[43 ] 将SMA嵌入聚氯乙烯片中作为柔性胸鳍,通过施加周期性电压,使机械胸鳍稳定周期性摆动,看起来像鳐鱼游动一样. ...
... [43 ]将SMA嵌入聚氯乙烯片中作为柔性胸鳍,通过施加周期性电压,使机械胸鳍稳定周期性摆动,看起来像鳐鱼游动一样. ...
... Material,production,energy source and movement posture of integrated intelligent soft robots
Tab.1 名称 材料 制造工艺 能量来源 运动方式 四足爬行机器人[23 ] 硅橡胶:Elastosil M4601,Ecoflex 0030 软光刻 微型气泵 海星:爬行 流体驱动仿生鱼[25 ] 硅橡胶:Mold Star 15 模具铸造法 微型液压泵 鱼:游动 仿生海星[28 ] 硅橡胶:Dragonskin 10;SMA 铸造法,3D打印 锂聚合物电池 海星:水下行走 仿生蛇[32 ] 硅橡胶 模具铸造法 微型气泵 蛇:爬行 六足行走机器人[33 ] 硅橡胶:Ecoflex 30 模具铸造法 微型气泵 行走 仿蛇爬行机器人[34 ] 硅橡胶:Ecoflex 0030 激光切割,模具铸造法 微型气泵 蛇:爬行 仿生青蛙[35 ] 硅橡胶:Ecoflex 0050;PDMS:Sylgard 184 模具铸造法,3D打印 高压CO2 气瓶 青蛙:游动 仿生乌贼[36 ] 硅橡胶:Ecoflex 0030 模具铸造法,3D打印 高压CO2 气瓶 乌贼:喷射前进 机械鳐鱼[43 ] SMA;聚氯乙烯 − 锂聚合物电池 鳐:游动 仿生水蛇[44 ] SMA;聚氨酯 − 锂聚合物电池 蛇:游动 IPMC驱动仿生鱼[45 ] IPMC − 锂聚合物电池 鱼:游动 仿生蝠鲼[47 ] IPMC;PDMS 模具铸造法 锂聚合物电池 蝠鲼:游动 仿生魔鬼鱼[48 ] IPMC;PDMS 模具铸造法,3D打印 锂聚合物电池 魔鬼鱼:游动 滚动机器人[49 ] 硅橡胶:Ecoflex 0030 模具铸造法 过氧化氢电池 滚动 多次跳跃机器人[50 ] 类橡胶 3D打印 丁烷燃料电池 跳跃 Octopus[52 ] 硅橡胶:Ecoflex 30;PDMS:Sylgard 184 模具铸造法,软光刻,3D打印,激光切割 过氧化氢电池 章鱼:抬腿 仿生狮子鱼[53 ] 硅橡胶:Dragonskin 20;石墨 模具铸造法,3D打印 碘化锌电池液 鱼:游动 单次跳跃机器人[54 ] 硅橡胶:M4601 软光刻,3D打印 丁烷燃料电池 跳跃 机械鳗鱼[68 ] 硅橡胶:Ecoflex 0030,Dragon Skin 0010 软光刻,3D打印 齿轮泵 游动 SMA四足机器人[69 ] SMA、导热弹性体 − 锂聚合物电池 跑动 介电弹性体驱动鳐鱼[70 ] PDMS:Sylgard 184;水凝胶 模具铸造法 介电弹性体 鳐:游动 仿生蚯蚓[71 ] SMA、聚醚醚酮树脂 − 锂聚合物电池 蚯蚓:蠕动 DE驱动乌贼[72 ] 介电弹性体 − 锂聚合物电池 乌贼:喷射前进
2.2. 制造方法 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
... 在水中生活的动物,大多数都是以游泳的运动方式,通过鳍或身体附肢的摆动产生动力,克服水的阻力来运动. 鱼类中表现出的特殊行为是逃生反应,需要鱼类将身体快速弯曲到大角度,以便加速远离不利的外部刺激[87 -88 ] . 以液体介质驱动鱼尾摆动的远程人工操作软体机械鱼,身体几乎完全由硅橡胶组成,能够实现模仿鱼类向前游进和逃生反应运动[26 , 77 ] (见图10(a) ). 另一款仿生狮子鱼除了外形、运动方式和狮子鱼极为相像外,最大的亮点是自身能量循环系统. 仿生血管系统以氧化还原液流电池为能量来源,将液压传递、致动和能量存储的功能整合到单个集成设计中,从而成几何倍数地增加了机器人的能量密度,可以实现长达36 h的连续运转[53 ] (见图10(b) ). 除了利用尾鳍摆动产生动力的机器人外,还有模仿水蛇摆动身体前进或者模仿鳐鱼利用胸鳍摆动产生动力的机器人. 将SMA嵌入高分子聚合物(聚氨酯)中作为仿生水蛇的身体,通电时SMA弯曲,弹性能量被储存在弹性基板中;停止通电,弹性能量被释放出来驱动返回运动,就像蛇一样弯蜒运动[44 ] (见图10(c) ). 按照同样的驱动原理,研究人员模仿鳐鱼的游动方式制作了软体机器人,机器人主体分为背盖、中板、腹盖三部分,2个胸鳍由嵌入SMA的塑料板组成,能够较好地实现前进、转弯动作[43 ] (见图10(d) ). 如图10(e) 所示的仿生鳐鱼主要由介电弹性体和水凝胶组成,除了优秀的运动能力外还有着良好透明性、持久性和温度耐受性[70 ] . ...
3
... SMA是坚固的智能材料,能够在温度和应力作用下发生相变,具有独特的形状记忆效应,同时可以被制成许多形状,例如线、板、管和丝带[43 ] ,更好地用在形状各异的软体机器人中. 集成化智能软体机器人使用的形状记忆合金几乎均为钛镍合金,因为钛镍合金最易制得,同时具有恢复应力高、工作电压低、寿命长等优点. Low等[44 ] 模仿蛇的身体游动前进的姿态,将SMA嵌入高分子聚合物中形成弹性基板,在通电时SMA弯曲,能量被储存在弹性基板中;在停止通电后,能量被释放出来驱动返回运动. 同样,Wang等[43 ] 将SMA嵌入聚氯乙烯片中作为柔性胸鳍,通过施加周期性电压,使机械胸鳍稳定周期性摆动,看起来像鳐鱼游动一样. ...
... Material,production,energy source and movement posture of integrated intelligent soft robots
Tab.1 名称 材料 制造工艺 能量来源 运动方式 四足爬行机器人[23 ] 硅橡胶:Elastosil M4601,Ecoflex 0030 软光刻 微型气泵 海星:爬行 流体驱动仿生鱼[25 ] 硅橡胶:Mold Star 15 模具铸造法 微型液压泵 鱼:游动 仿生海星[28 ] 硅橡胶:Dragonskin 10;SMA 铸造法,3D打印 锂聚合物电池 海星:水下行走 仿生蛇[32 ] 硅橡胶 模具铸造法 微型气泵 蛇:爬行 六足行走机器人[33 ] 硅橡胶:Ecoflex 30 模具铸造法 微型气泵 行走 仿蛇爬行机器人[34 ] 硅橡胶:Ecoflex 0030 激光切割,模具铸造法 微型气泵 蛇:爬行 仿生青蛙[35 ] 硅橡胶:Ecoflex 0050;PDMS:Sylgard 184 模具铸造法,3D打印 高压CO2 气瓶 青蛙:游动 仿生乌贼[36 ] 硅橡胶:Ecoflex 0030 模具铸造法,3D打印 高压CO2 气瓶 乌贼:喷射前进 机械鳐鱼[43 ] SMA;聚氯乙烯 − 锂聚合物电池 鳐:游动 仿生水蛇[44 ] SMA;聚氨酯 − 锂聚合物电池 蛇:游动 IPMC驱动仿生鱼[45 ] IPMC − 锂聚合物电池 鱼:游动 仿生蝠鲼[47 ] IPMC;PDMS 模具铸造法 锂聚合物电池 蝠鲼:游动 仿生魔鬼鱼[48 ] IPMC;PDMS 模具铸造法,3D打印 锂聚合物电池 魔鬼鱼:游动 滚动机器人[49 ] 硅橡胶:Ecoflex 0030 模具铸造法 过氧化氢电池 滚动 多次跳跃机器人[50 ] 类橡胶 3D打印 丁烷燃料电池 跳跃 Octopus[52 ] 硅橡胶:Ecoflex 30;PDMS:Sylgard 184 模具铸造法,软光刻,3D打印,激光切割 过氧化氢电池 章鱼:抬腿 仿生狮子鱼[53 ] 硅橡胶:Dragonskin 20;石墨 模具铸造法,3D打印 碘化锌电池液 鱼:游动 单次跳跃机器人[54 ] 硅橡胶:M4601 软光刻,3D打印 丁烷燃料电池 跳跃 机械鳗鱼[68 ] 硅橡胶:Ecoflex 0030,Dragon Skin 0010 软光刻,3D打印 齿轮泵 游动 SMA四足机器人[69 ] SMA、导热弹性体 − 锂聚合物电池 跑动 介电弹性体驱动鳐鱼[70 ] PDMS:Sylgard 184;水凝胶 模具铸造法 介电弹性体 鳐:游动 仿生蚯蚓[71 ] SMA、聚醚醚酮树脂 − 锂聚合物电池 蚯蚓:蠕动 DE驱动乌贼[72 ] 介电弹性体 − 锂聚合物电池 乌贼:喷射前进
2.2. 制造方法 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
... 在水中生活的动物,大多数都是以游泳的运动方式,通过鳍或身体附肢的摆动产生动力,克服水的阻力来运动. 鱼类中表现出的特殊行为是逃生反应,需要鱼类将身体快速弯曲到大角度,以便加速远离不利的外部刺激[87 -88 ] . 以液体介质驱动鱼尾摆动的远程人工操作软体机械鱼,身体几乎完全由硅橡胶组成,能够实现模仿鱼类向前游进和逃生反应运动[26 , 77 ] (见图10(a) ). 另一款仿生狮子鱼除了外形、运动方式和狮子鱼极为相像外,最大的亮点是自身能量循环系统. 仿生血管系统以氧化还原液流电池为能量来源,将液压传递、致动和能量存储的功能整合到单个集成设计中,从而成几何倍数地增加了机器人的能量密度,可以实现长达36 h的连续运转[53 ] (见图10(b) ). 除了利用尾鳍摆动产生动力的机器人外,还有模仿水蛇摆动身体前进或者模仿鳐鱼利用胸鳍摆动产生动力的机器人. 将SMA嵌入高分子聚合物(聚氨酯)中作为仿生水蛇的身体,通电时SMA弯曲,弹性能量被储存在弹性基板中;停止通电,弹性能量被释放出来驱动返回运动,就像蛇一样弯蜒运动[44 ] (见图10(c) ). 按照同样的驱动原理,研究人员模仿鳐鱼的游动方式制作了软体机器人,机器人主体分为背盖、中板、腹盖三部分,2个胸鳍由嵌入SMA的塑料板组成,能够较好地实现前进、转弯动作[43 ] (见图10(d) ). 如图10(e) 所示的仿生鳐鱼主要由介电弹性体和水凝胶组成,除了优秀的运动能力外还有着良好透明性、持久性和温度耐受性[70 ] . ...
Free-locomotion of underwater vehicles actuated by ionic polymer metal composites
3
2010
... IPMC同样是适合作驱动器的先进材料之一,当在IPMC上施加电压时,水合阳离子和水分子在膜内传输,相关的静电相互作用导致弯曲运动,从而产生驱动效果. 它具有较低的驱动电压[45 ] ,较高的转化效率和合理的工作频率,不需要任何防水步骤即可应用于水中[46 ] . 利用这些特点,Chen等[47 -48 ] 用聚二甲基硅氧烷(polydimethylsiloxane,PDMS)包裹IPMC形成仿生胸鳍,设计仿生蝠鲼和仿生魔鬼鱼,通过将电压信号施加到IPMC,PDMS层会跟随电压周期变化产生周期性摆动,如图3 所示为仿生蝠鲼和仿生魔鬼鱼的材料使用和结构组成. IPMC虽然效率高,工作频率适合于仿生结构,但受驱动应力小、制备成本高、潮湿性等问题的制约,不易在直流电压下保持姿态,因此使用受到限制. ...
... Material,production,energy source and movement posture of integrated intelligent soft robots
Tab.1 名称 材料 制造工艺 能量来源 运动方式 四足爬行机器人[23 ] 硅橡胶:Elastosil M4601,Ecoflex 0030 软光刻 微型气泵 海星:爬行 流体驱动仿生鱼[25 ] 硅橡胶:Mold Star 15 模具铸造法 微型液压泵 鱼:游动 仿生海星[28 ] 硅橡胶:Dragonskin 10;SMA 铸造法,3D打印 锂聚合物电池 海星:水下行走 仿生蛇[32 ] 硅橡胶 模具铸造法 微型气泵 蛇:爬行 六足行走机器人[33 ] 硅橡胶:Ecoflex 30 模具铸造法 微型气泵 行走 仿蛇爬行机器人[34 ] 硅橡胶:Ecoflex 0030 激光切割,模具铸造法 微型气泵 蛇:爬行 仿生青蛙[35 ] 硅橡胶:Ecoflex 0050;PDMS:Sylgard 184 模具铸造法,3D打印 高压CO2 气瓶 青蛙:游动 仿生乌贼[36 ] 硅橡胶:Ecoflex 0030 模具铸造法,3D打印 高压CO2 气瓶 乌贼:喷射前进 机械鳐鱼[43 ] SMA;聚氯乙烯 − 锂聚合物电池 鳐:游动 仿生水蛇[44 ] SMA;聚氨酯 − 锂聚合物电池 蛇:游动 IPMC驱动仿生鱼[45 ] IPMC − 锂聚合物电池 鱼:游动 仿生蝠鲼[47 ] IPMC;PDMS 模具铸造法 锂聚合物电池 蝠鲼:游动 仿生魔鬼鱼[48 ] IPMC;PDMS 模具铸造法,3D打印 锂聚合物电池 魔鬼鱼:游动 滚动机器人[49 ] 硅橡胶:Ecoflex 0030 模具铸造法 过氧化氢电池 滚动 多次跳跃机器人[50 ] 类橡胶 3D打印 丁烷燃料电池 跳跃 Octopus[52 ] 硅橡胶:Ecoflex 30;PDMS:Sylgard 184 模具铸造法,软光刻,3D打印,激光切割 过氧化氢电池 章鱼:抬腿 仿生狮子鱼[53 ] 硅橡胶:Dragonskin 20;石墨 模具铸造法,3D打印 碘化锌电池液 鱼:游动 单次跳跃机器人[54 ] 硅橡胶:M4601 软光刻,3D打印 丁烷燃料电池 跳跃 机械鳗鱼[68 ] 硅橡胶:Ecoflex 0030,Dragon Skin 0010 软光刻,3D打印 齿轮泵 游动 SMA四足机器人[69 ] SMA、导热弹性体 − 锂聚合物电池 跑动 介电弹性体驱动鳐鱼[70 ] PDMS:Sylgard 184;水凝胶 模具铸造法 介电弹性体 鳐:游动 仿生蚯蚓[71 ] SMA、聚醚醚酮树脂 − 锂聚合物电池 蚯蚓:蠕动 DE驱动乌贼[72 ] 介电弹性体 − 锂聚合物电池 乌贼:喷射前进
2.2. 制造方法 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
... 软体机器人由于躯体的柔性,其基础的运动学和动力学理论公式很难求解,至今关于软体机器人的运动理论仍然是空白,机器人的姿态、方向、速度等基础指标不可控制,也不可预测[94 ] . 其次,由于机器人的运动学和动力学理论暂时不可求,软体机器人的建模和控制算法也成为了难题. 软体机器人常用的运动学建模模型-分段常曲率模型[95 ] 适用于线性连续软体执行器,对于结构更为复杂的集成化智能软体机器人来说,这种模型是不适用的. Aureli等[45 ] 在研究IPMC驱动器时仍采用研究刚性机器人的综合模型,在设定的坐标轴下确定齐次变换矩阵,通过坐标变换求出执行器末端相对坐标轴的位置. 这种方法虽然考虑了水动力效应,如附加质量和阻尼,以及摇摆、偏航等因素,但须基于刚性材料的前提. 对于集成化智能软体机器人的不同运动方式、不同结构组成,需要独特的建模模型,才能有针对性地实现控制. ...
1
... IPMC同样是适合作驱动器的先进材料之一,当在IPMC上施加电压时,水合阳离子和水分子在膜内传输,相关的静电相互作用导致弯曲运动,从而产生驱动效果. 它具有较低的驱动电压[45 ] ,较高的转化效率和合理的工作频率,不需要任何防水步骤即可应用于水中[46 ] . 利用这些特点,Chen等[47 -48 ] 用聚二甲基硅氧烷(polydimethylsiloxane,PDMS)包裹IPMC形成仿生胸鳍,设计仿生蝠鲼和仿生魔鬼鱼,通过将电压信号施加到IPMC,PDMS层会跟随电压周期变化产生周期性摆动,如图3 所示为仿生蝠鲼和仿生魔鬼鱼的材料使用和结构组成. IPMC虽然效率高,工作频率适合于仿生结构,但受驱动应力小、制备成本高、潮湿性等问题的制约,不易在直流电压下保持姿态,因此使用受到限制. ...
2
... IPMC同样是适合作驱动器的先进材料之一,当在IPMC上施加电压时,水合阳离子和水分子在膜内传输,相关的静电相互作用导致弯曲运动,从而产生驱动效果. 它具有较低的驱动电压[45 ] ,较高的转化效率和合理的工作频率,不需要任何防水步骤即可应用于水中[46 ] . 利用这些特点,Chen等[47 -48 ] 用聚二甲基硅氧烷(polydimethylsiloxane,PDMS)包裹IPMC形成仿生胸鳍,设计仿生蝠鲼和仿生魔鬼鱼,通过将电压信号施加到IPMC,PDMS层会跟随电压周期变化产生周期性摆动,如图3 所示为仿生蝠鲼和仿生魔鬼鱼的材料使用和结构组成. IPMC虽然效率高,工作频率适合于仿生结构,但受驱动应力小、制备成本高、潮湿性等问题的制约,不易在直流电压下保持姿态,因此使用受到限制. ...
... Material,production,energy source and movement posture of integrated intelligent soft robots
Tab.1 名称 材料 制造工艺 能量来源 运动方式 四足爬行机器人[23 ] 硅橡胶:Elastosil M4601,Ecoflex 0030 软光刻 微型气泵 海星:爬行 流体驱动仿生鱼[25 ] 硅橡胶:Mold Star 15 模具铸造法 微型液压泵 鱼:游动 仿生海星[28 ] 硅橡胶:Dragonskin 10;SMA 铸造法,3D打印 锂聚合物电池 海星:水下行走 仿生蛇[32 ] 硅橡胶 模具铸造法 微型气泵 蛇:爬行 六足行走机器人[33 ] 硅橡胶:Ecoflex 30 模具铸造法 微型气泵 行走 仿蛇爬行机器人[34 ] 硅橡胶:Ecoflex 0030 激光切割,模具铸造法 微型气泵 蛇:爬行 仿生青蛙[35 ] 硅橡胶:Ecoflex 0050;PDMS:Sylgard 184 模具铸造法,3D打印 高压CO2 气瓶 青蛙:游动 仿生乌贼[36 ] 硅橡胶:Ecoflex 0030 模具铸造法,3D打印 高压CO2 气瓶 乌贼:喷射前进 机械鳐鱼[43 ] SMA;聚氯乙烯 − 锂聚合物电池 鳐:游动 仿生水蛇[44 ] SMA;聚氨酯 − 锂聚合物电池 蛇:游动 IPMC驱动仿生鱼[45 ] IPMC − 锂聚合物电池 鱼:游动 仿生蝠鲼[47 ] IPMC;PDMS 模具铸造法 锂聚合物电池 蝠鲼:游动 仿生魔鬼鱼[48 ] IPMC;PDMS 模具铸造法,3D打印 锂聚合物电池 魔鬼鱼:游动 滚动机器人[49 ] 硅橡胶:Ecoflex 0030 模具铸造法 过氧化氢电池 滚动 多次跳跃机器人[50 ] 类橡胶 3D打印 丁烷燃料电池 跳跃 Octopus[52 ] 硅橡胶:Ecoflex 30;PDMS:Sylgard 184 模具铸造法,软光刻,3D打印,激光切割 过氧化氢电池 章鱼:抬腿 仿生狮子鱼[53 ] 硅橡胶:Dragonskin 20;石墨 模具铸造法,3D打印 碘化锌电池液 鱼:游动 单次跳跃机器人[54 ] 硅橡胶:M4601 软光刻,3D打印 丁烷燃料电池 跳跃 机械鳗鱼[68 ] 硅橡胶:Ecoflex 0030,Dragon Skin 0010 软光刻,3D打印 齿轮泵 游动 SMA四足机器人[69 ] SMA、导热弹性体 − 锂聚合物电池 跑动 介电弹性体驱动鳐鱼[70 ] PDMS:Sylgard 184;水凝胶 模具铸造法 介电弹性体 鳐:游动 仿生蚯蚓[71 ] SMA、聚醚醚酮树脂 − 锂聚合物电池 蚯蚓:蠕动 DE驱动乌贼[72 ] 介电弹性体 − 锂聚合物电池 乌贼:喷射前进
2.2. 制造方法 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
2
... IPMC同样是适合作驱动器的先进材料之一,当在IPMC上施加电压时,水合阳离子和水分子在膜内传输,相关的静电相互作用导致弯曲运动,从而产生驱动效果. 它具有较低的驱动电压[45 ] ,较高的转化效率和合理的工作频率,不需要任何防水步骤即可应用于水中[46 ] . 利用这些特点,Chen等[47 -48 ] 用聚二甲基硅氧烷(polydimethylsiloxane,PDMS)包裹IPMC形成仿生胸鳍,设计仿生蝠鲼和仿生魔鬼鱼,通过将电压信号施加到IPMC,PDMS层会跟随电压周期变化产生周期性摆动,如图3 所示为仿生蝠鲼和仿生魔鬼鱼的材料使用和结构组成. IPMC虽然效率高,工作频率适合于仿生结构,但受驱动应力小、制备成本高、潮湿性等问题的制约,不易在直流电压下保持姿态,因此使用受到限制. ...
... Material,production,energy source and movement posture of integrated intelligent soft robots
Tab.1 名称 材料 制造工艺 能量来源 运动方式 四足爬行机器人[23 ] 硅橡胶:Elastosil M4601,Ecoflex 0030 软光刻 微型气泵 海星:爬行 流体驱动仿生鱼[25 ] 硅橡胶:Mold Star 15 模具铸造法 微型液压泵 鱼:游动 仿生海星[28 ] 硅橡胶:Dragonskin 10;SMA 铸造法,3D打印 锂聚合物电池 海星:水下行走 仿生蛇[32 ] 硅橡胶 模具铸造法 微型气泵 蛇:爬行 六足行走机器人[33 ] 硅橡胶:Ecoflex 30 模具铸造法 微型气泵 行走 仿蛇爬行机器人[34 ] 硅橡胶:Ecoflex 0030 激光切割,模具铸造法 微型气泵 蛇:爬行 仿生青蛙[35 ] 硅橡胶:Ecoflex 0050;PDMS:Sylgard 184 模具铸造法,3D打印 高压CO2 气瓶 青蛙:游动 仿生乌贼[36 ] 硅橡胶:Ecoflex 0030 模具铸造法,3D打印 高压CO2 气瓶 乌贼:喷射前进 机械鳐鱼[43 ] SMA;聚氯乙烯 − 锂聚合物电池 鳐:游动 仿生水蛇[44 ] SMA;聚氨酯 − 锂聚合物电池 蛇:游动 IPMC驱动仿生鱼[45 ] IPMC − 锂聚合物电池 鱼:游动 仿生蝠鲼[47 ] IPMC;PDMS 模具铸造法 锂聚合物电池 蝠鲼:游动 仿生魔鬼鱼[48 ] IPMC;PDMS 模具铸造法,3D打印 锂聚合物电池 魔鬼鱼:游动 滚动机器人[49 ] 硅橡胶:Ecoflex 0030 模具铸造法 过氧化氢电池 滚动 多次跳跃机器人[50 ] 类橡胶 3D打印 丁烷燃料电池 跳跃 Octopus[52 ] 硅橡胶:Ecoflex 30;PDMS:Sylgard 184 模具铸造法,软光刻,3D打印,激光切割 过氧化氢电池 章鱼:抬腿 仿生狮子鱼[53 ] 硅橡胶:Dragonskin 20;石墨 模具铸造法,3D打印 碘化锌电池液 鱼:游动 单次跳跃机器人[54 ] 硅橡胶:M4601 软光刻,3D打印 丁烷燃料电池 跳跃 机械鳗鱼[68 ] 硅橡胶:Ecoflex 0030,Dragon Skin 0010 软光刻,3D打印 齿轮泵 游动 SMA四足机器人[69 ] SMA、导热弹性体 − 锂聚合物电池 跑动 介电弹性体驱动鳐鱼[70 ] PDMS:Sylgard 184;水凝胶 模具铸造法 介电弹性体 鳐:游动 仿生蚯蚓[71 ] SMA、聚醚醚酮树脂 − 锂聚合物电池 蚯蚓:蠕动 DE驱动乌贼[72 ] 介电弹性体 − 锂聚合物电池 乌贼:喷射前进
2.2. 制造方法 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
6
... 化学反应驱动可以绕过对电能的需要,利用化学反应产生的能量为软材料驱动器提供压强,例如氧化物反应[49 ] 和碳氢化合物燃烧[50 -51 ] . 集成化滚动机器人使用过氧化氢分解产生氧气作为压力介质,按需提供压力,称之为“气动电池”[49 ] . 如图4 所示为“气动电池”的原理,过氧化氢与催化剂接触释放氧气;在气压升高后,一部分气体从疏水膜排出,另一部分气体挤压左侧的偏转器,阻止过氧化氢和催化剂接触,使反应停止. 仿生章鱼机器人(Octopus)同样利用过氧化氢通过催化作用转变成大量气体,这些气体流入仿生章鱼机器人触手的微流体孔道,给触手充气从而引发运动[52 ] . 除了过氧化氢分解驱动外,还有一款由碘化锌电池液驱动的集成化仿生狮子鱼,锌在放电时释放出电子和锌离子. 电子流动产生的电流为电子部分供电,电解质作为液压系统的工作介质相当于液压油,用于驱动鱼鳍、鱼尾摆动[53 ] . 使用过氧化氢和碘化锌电解液的化学反应驱动方式反应过程安全且安静,当原料耗尽时填加简便[54 ] . ...
... [49 ]. 如图4 所示为“气动电池”的原理,过氧化氢与催化剂接触释放氧气;在气压升高后,一部分气体从疏水膜排出,另一部分气体挤压左侧的偏转器,阻止过氧化氢和催化剂接触,使反应停止. 仿生章鱼机器人(Octopus)同样利用过氧化氢通过催化作用转变成大量气体,这些气体流入仿生章鱼机器人触手的微流体孔道,给触手充气从而引发运动[52 ] . 除了过氧化氢分解驱动外,还有一款由碘化锌电池液驱动的集成化仿生狮子鱼,锌在放电时释放出电子和锌离子. 电子流动产生的电流为电子部分供电,电解质作为液压系统的工作介质相当于液压油,用于驱动鱼鳍、鱼尾摆动[53 ] . 使用过氧化氢和碘化锌电解液的化学反应驱动方式反应过程安全且安静,当原料耗尽时填加简便[54 ] . ...
... 如图5(a) 所示,利用硅橡胶制备4个双向流动弹性体驱动器,串联起来构成集成智能化仿生蛇的身体[32 ] . 在模仿蛇、鱼、蠕虫等周期性扭曲身体的动作时,研究人员将执行器制作成对称双腔结构,让流体规律地双向流动达到摆动的效果. 利用相同的思路,使用Ecoflex 0030(硅橡胶)串联4个双向弯曲的Dragon Skin 0010(硅橡胶)驱动器,可以在水中波状游动,形似鳗鱼[68 ] . 在设计滚动机器人前,研究人员首先测试了如图5(b) 所示的硅橡胶制作的双向流体驱动器组合后的弯曲效果,确保6个驱动器在呈圆周排列时,能够实现滚动前进[49 ] . 如图5(c) 所示为仿生乌贼[36 -37 ] 上鱼鳍在展开状态和折叠状态的示意图,展开状态通常在喷射前进和滑翔阶段使用,折叠状态则在入水时使用,硅橡胶不仅提供给鱼鳍较好的弯折能力,也在受到阻力时提供了足够的韧性. 硅橡胶和PDMS还可以包裹在智能驱动材料外部,保护SMA和IPMC在外界冲击下不会损坏,如图5(d) 所示为集成化仿生海星使用的硅橡胶包裹SMA软执行器. 一些研究组在集成化智能软体机器人的材料设计上以弹性体高分子材料作基底,同时使用纤维材料进行增强,并在一侧加入不可延展的材料作为应变限制层,好比是动物的韧带[30 ] ,限制着运动范围,机器人在能量释放后被动地恢复原状. 应变限制层使用的材料不是绝对的,只要与延展层材料弹性区分明显,容易黏合即可. Fan等[35 ] 用纤维缠绕硅橡胶制作执行器,并在外侧嵌合应变限制层限制运动范围,执行器在压力释放后被动地恢复弯曲,如图5(e) 所示. 值得一提的是,大部分软体执行器都是在加压时发生弯曲,而这一组恰恰相反,在加压时执行器弯曲角度大幅减小,能够更好地模仿青蛙的蹬腿动作. ...
... Material,production,energy source and movement posture of integrated intelligent soft robots
Tab.1 名称 材料 制造工艺 能量来源 运动方式 四足爬行机器人[23 ] 硅橡胶:Elastosil M4601,Ecoflex 0030 软光刻 微型气泵 海星:爬行 流体驱动仿生鱼[25 ] 硅橡胶:Mold Star 15 模具铸造法 微型液压泵 鱼:游动 仿生海星[28 ] 硅橡胶:Dragonskin 10;SMA 铸造法,3D打印 锂聚合物电池 海星:水下行走 仿生蛇[32 ] 硅橡胶 模具铸造法 微型气泵 蛇:爬行 六足行走机器人[33 ] 硅橡胶:Ecoflex 30 模具铸造法 微型气泵 行走 仿蛇爬行机器人[34 ] 硅橡胶:Ecoflex 0030 激光切割,模具铸造法 微型气泵 蛇:爬行 仿生青蛙[35 ] 硅橡胶:Ecoflex 0050;PDMS:Sylgard 184 模具铸造法,3D打印 高压CO2 气瓶 青蛙:游动 仿生乌贼[36 ] 硅橡胶:Ecoflex 0030 模具铸造法,3D打印 高压CO2 气瓶 乌贼:喷射前进 机械鳐鱼[43 ] SMA;聚氯乙烯 − 锂聚合物电池 鳐:游动 仿生水蛇[44 ] SMA;聚氨酯 − 锂聚合物电池 蛇:游动 IPMC驱动仿生鱼[45 ] IPMC − 锂聚合物电池 鱼:游动 仿生蝠鲼[47 ] IPMC;PDMS 模具铸造法 锂聚合物电池 蝠鲼:游动 仿生魔鬼鱼[48 ] IPMC;PDMS 模具铸造法,3D打印 锂聚合物电池 魔鬼鱼:游动 滚动机器人[49 ] 硅橡胶:Ecoflex 0030 模具铸造法 过氧化氢电池 滚动 多次跳跃机器人[50 ] 类橡胶 3D打印 丁烷燃料电池 跳跃 Octopus[52 ] 硅橡胶:Ecoflex 30;PDMS:Sylgard 184 模具铸造法,软光刻,3D打印,激光切割 过氧化氢电池 章鱼:抬腿 仿生狮子鱼[53 ] 硅橡胶:Dragonskin 20;石墨 模具铸造法,3D打印 碘化锌电池液 鱼:游动 单次跳跃机器人[54 ] 硅橡胶:M4601 软光刻,3D打印 丁烷燃料电池 跳跃 机械鳗鱼[68 ] 硅橡胶:Ecoflex 0030,Dragon Skin 0010 软光刻,3D打印 齿轮泵 游动 SMA四足机器人[69 ] SMA、导热弹性体 − 锂聚合物电池 跑动 介电弹性体驱动鳐鱼[70 ] PDMS:Sylgard 184;水凝胶 模具铸造法 介电弹性体 鳐:游动 仿生蚯蚓[71 ] SMA、聚醚醚酮树脂 − 锂聚合物电池 蚯蚓:蠕动 DE驱动乌贼[72 ] 介电弹性体 − 锂聚合物电池 乌贼:喷射前进
2.2. 制造方法 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
... 铸造技术是上述4类主要制造工艺中最简单常见的. 利用计算机辅助软件设计模具,然后3D打印或切削加工来制备模具[74 ] ;在模具中倒入液态弹性材料,在适当温度下烘烤/光照[49 , 75 ] . 为了封闭流体通道,须将开放通道件胶合到扁平膜上,黏合的部分涂抹相同液态弹性材料,再次烘烤或光照. 为了让弹性执行器在加压时达到理想的弯曲效果,常在固化时在执行器一侧加入不可延展的材料. 集成化设计的流体驱动仿生鱼[25 ] 、仿生蛇[32 ] 、六足行走机器人[33 ] 、滚动机器人[49 ] 、仿生青蛙[35 ] 等在制作软执行器时都使用了铸造法. 如图6 所示为流体驱动仿生鱼的鱼尾部分采用铸造法的制作过程,首先用模具铸造出鱼尾的三部分,然后组装胶合起来. 铸造法的应用虽然普遍,但在加工前有很多设计和模具制造的工作,且弹性材料也有凝固过程,所以总体花费时间较长. ...
... [49 ]、仿生青蛙[35 ] 等在制作软执行器时都使用了铸造法. 如图6 所示为流体驱动仿生鱼的鱼尾部分采用铸造法的制作过程,首先用模具铸造出鱼尾的三部分,然后组装胶合起来. 铸造法的应用虽然普遍,但在加工前有很多设计和模具制造的工作,且弹性材料也有凝固过程,所以总体花费时间较长. ...
A 3D-printed, functionally graded soft robot powered by combustion
4
2015
... 化学反应驱动可以绕过对电能的需要,利用化学反应产生的能量为软材料驱动器提供压强,例如氧化物反应[49 ] 和碳氢化合物燃烧[50 -51 ] . 集成化滚动机器人使用过氧化氢分解产生氧气作为压力介质,按需提供压力,称之为“气动电池”[49 ] . 如图4 所示为“气动电池”的原理,过氧化氢与催化剂接触释放氧气;在气压升高后,一部分气体从疏水膜排出,另一部分气体挤压左侧的偏转器,阻止过氧化氢和催化剂接触,使反应停止. 仿生章鱼机器人(Octopus)同样利用过氧化氢通过催化作用转变成大量气体,这些气体流入仿生章鱼机器人触手的微流体孔道,给触手充气从而引发运动[52 ] . 除了过氧化氢分解驱动外,还有一款由碘化锌电池液驱动的集成化仿生狮子鱼,锌在放电时释放出电子和锌离子. 电子流动产生的电流为电子部分供电,电解质作为液压系统的工作介质相当于液压油,用于驱动鱼鳍、鱼尾摆动[53 ] . 使用过氧化氢和碘化锌电解液的化学反应驱动方式反应过程安全且安静,当原料耗尽时填加简便[54 ] . ...
... Bartlett等[50 ] 和Michael等[55 ] 利用丁烷和氧气燃烧产生推力,使机器人的气腔迅速膨胀,以此为动力源设计的集成化跳跃机器人分别可以跳起自身身高6.0、7.5倍的高度. 这种燃烧驱动的明显优点是碳氢化合物的能量密度高于电池,但是燃烧爆炸的方式难以控制力度和方向,须提前设计好具体能效[56 ] . 可燃气体可以提供迅速的执行速度,但是也对柔软材料和密封件有更高要求. 除此之外燃烧驱动还有一个难题,就是动作发生通常为一次性的,如要连续跳跃,就需要复杂的内部结构,这势必会增加重量,影响运动效果. ...
... Material,production,energy source and movement posture of integrated intelligent soft robots
Tab.1 名称 材料 制造工艺 能量来源 运动方式 四足爬行机器人[23 ] 硅橡胶:Elastosil M4601,Ecoflex 0030 软光刻 微型气泵 海星:爬行 流体驱动仿生鱼[25 ] 硅橡胶:Mold Star 15 模具铸造法 微型液压泵 鱼:游动 仿生海星[28 ] 硅橡胶:Dragonskin 10;SMA 铸造法,3D打印 锂聚合物电池 海星:水下行走 仿生蛇[32 ] 硅橡胶 模具铸造法 微型气泵 蛇:爬行 六足行走机器人[33 ] 硅橡胶:Ecoflex 30 模具铸造法 微型气泵 行走 仿蛇爬行机器人[34 ] 硅橡胶:Ecoflex 0030 激光切割,模具铸造法 微型气泵 蛇:爬行 仿生青蛙[35 ] 硅橡胶:Ecoflex 0050;PDMS:Sylgard 184 模具铸造法,3D打印 高压CO2 气瓶 青蛙:游动 仿生乌贼[36 ] 硅橡胶:Ecoflex 0030 模具铸造法,3D打印 高压CO2 气瓶 乌贼:喷射前进 机械鳐鱼[43 ] SMA;聚氯乙烯 − 锂聚合物电池 鳐:游动 仿生水蛇[44 ] SMA;聚氨酯 − 锂聚合物电池 蛇:游动 IPMC驱动仿生鱼[45 ] IPMC − 锂聚合物电池 鱼:游动 仿生蝠鲼[47 ] IPMC;PDMS 模具铸造法 锂聚合物电池 蝠鲼:游动 仿生魔鬼鱼[48 ] IPMC;PDMS 模具铸造法,3D打印 锂聚合物电池 魔鬼鱼:游动 滚动机器人[49 ] 硅橡胶:Ecoflex 0030 模具铸造法 过氧化氢电池 滚动 多次跳跃机器人[50 ] 类橡胶 3D打印 丁烷燃料电池 跳跃 Octopus[52 ] 硅橡胶:Ecoflex 30;PDMS:Sylgard 184 模具铸造法,软光刻,3D打印,激光切割 过氧化氢电池 章鱼:抬腿 仿生狮子鱼[53 ] 硅橡胶:Dragonskin 20;石墨 模具铸造法,3D打印 碘化锌电池液 鱼:游动 单次跳跃机器人[54 ] 硅橡胶:M4601 软光刻,3D打印 丁烷燃料电池 跳跃 机械鳗鱼[68 ] 硅橡胶:Ecoflex 0030,Dragon Skin 0010 软光刻,3D打印 齿轮泵 游动 SMA四足机器人[69 ] SMA、导热弹性体 − 锂聚合物电池 跑动 介电弹性体驱动鳐鱼[70 ] PDMS:Sylgard 184;水凝胶 模具铸造法 介电弹性体 鳐:游动 仿生蚯蚓[71 ] SMA、聚醚醚酮树脂 − 锂聚合物电池 蚯蚓:蠕动 DE驱动乌贼[72 ] 介电弹性体 − 锂聚合物电池 乌贼:喷射前进
2.2. 制造方法 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
... 为了探索更加敏捷的软体机器人,Bartlett等[50 ] 设计了多次跳跃机器人(见图9(f) ),填充一次燃料可以完成21次定向跳跃,相比单次跳跃机器人[54 ] (见图9(e) )有了较大进步,并且在接触地的部分也设计成从软到硬的材料过渡,通过在柔软材料界面处减少应力来减轻压力,极好地利用了橡胶的抗冲击性. 跳跃机器人须集成执行系统、驱动系统以及控制系统,极快的响应速度会让外界供给能量或信号的系缆成为负担. 目前软体机器人使用燃烧推动方式的能量转换效率往往低于1%,减少燃烧过程的能量浪费是未来研究的重要课题. ...
Using explosions to power a soft robot
1
2013
... 化学反应驱动可以绕过对电能的需要,利用化学反应产生的能量为软材料驱动器提供压强,例如氧化物反应[49 ] 和碳氢化合物燃烧[50 -51 ] . 集成化滚动机器人使用过氧化氢分解产生氧气作为压力介质,按需提供压力,称之为“气动电池”[49 ] . 如图4 所示为“气动电池”的原理,过氧化氢与催化剂接触释放氧气;在气压升高后,一部分气体从疏水膜排出,另一部分气体挤压左侧的偏转器,阻止过氧化氢和催化剂接触,使反应停止. 仿生章鱼机器人(Octopus)同样利用过氧化氢通过催化作用转变成大量气体,这些气体流入仿生章鱼机器人触手的微流体孔道,给触手充气从而引发运动[52 ] . 除了过氧化氢分解驱动外,还有一款由碘化锌电池液驱动的集成化仿生狮子鱼,锌在放电时释放出电子和锌离子. 电子流动产生的电流为电子部分供电,电解质作为液压系统的工作介质相当于液压油,用于驱动鱼鳍、鱼尾摆动[53 ] . 使用过氧化氢和碘化锌电解液的化学反应驱动方式反应过程安全且安静,当原料耗尽时填加简便[54 ] . ...
An integrated design and fabrication strategy for entirely soft, autonomous robots
5
2016
... 化学反应驱动可以绕过对电能的需要,利用化学反应产生的能量为软材料驱动器提供压强,例如氧化物反应[49 ] 和碳氢化合物燃烧[50 -51 ] . 集成化滚动机器人使用过氧化氢分解产生氧气作为压力介质,按需提供压力,称之为“气动电池”[49 ] . 如图4 所示为“气动电池”的原理,过氧化氢与催化剂接触释放氧气;在气压升高后,一部分气体从疏水膜排出,另一部分气体挤压左侧的偏转器,阻止过氧化氢和催化剂接触,使反应停止. 仿生章鱼机器人(Octopus)同样利用过氧化氢通过催化作用转变成大量气体,这些气体流入仿生章鱼机器人触手的微流体孔道,给触手充气从而引发运动[52 ] . 除了过氧化氢分解驱动外,还有一款由碘化锌电池液驱动的集成化仿生狮子鱼,锌在放电时释放出电子和锌离子. 电子流动产生的电流为电子部分供电,电解质作为液压系统的工作介质相当于液压油,用于驱动鱼鳍、鱼尾摆动[53 ] . 使用过氧化氢和碘化锌电解液的化学反应驱动方式反应过程安全且安静,当原料耗尽时填加简便[54 ] . ...
... Material,production,energy source and movement posture of integrated intelligent soft robots
Tab.1 名称 材料 制造工艺 能量来源 运动方式 四足爬行机器人[23 ] 硅橡胶:Elastosil M4601,Ecoflex 0030 软光刻 微型气泵 海星:爬行 流体驱动仿生鱼[25 ] 硅橡胶:Mold Star 15 模具铸造法 微型液压泵 鱼:游动 仿生海星[28 ] 硅橡胶:Dragonskin 10;SMA 铸造法,3D打印 锂聚合物电池 海星:水下行走 仿生蛇[32 ] 硅橡胶 模具铸造法 微型气泵 蛇:爬行 六足行走机器人[33 ] 硅橡胶:Ecoflex 30 模具铸造法 微型气泵 行走 仿蛇爬行机器人[34 ] 硅橡胶:Ecoflex 0030 激光切割,模具铸造法 微型气泵 蛇:爬行 仿生青蛙[35 ] 硅橡胶:Ecoflex 0050;PDMS:Sylgard 184 模具铸造法,3D打印 高压CO2 气瓶 青蛙:游动 仿生乌贼[36 ] 硅橡胶:Ecoflex 0030 模具铸造法,3D打印 高压CO2 气瓶 乌贼:喷射前进 机械鳐鱼[43 ] SMA;聚氯乙烯 − 锂聚合物电池 鳐:游动 仿生水蛇[44 ] SMA;聚氨酯 − 锂聚合物电池 蛇:游动 IPMC驱动仿生鱼[45 ] IPMC − 锂聚合物电池 鱼:游动 仿生蝠鲼[47 ] IPMC;PDMS 模具铸造法 锂聚合物电池 蝠鲼:游动 仿生魔鬼鱼[48 ] IPMC;PDMS 模具铸造法,3D打印 锂聚合物电池 魔鬼鱼:游动 滚动机器人[49 ] 硅橡胶:Ecoflex 0030 模具铸造法 过氧化氢电池 滚动 多次跳跃机器人[50 ] 类橡胶 3D打印 丁烷燃料电池 跳跃 Octopus[52 ] 硅橡胶:Ecoflex 30;PDMS:Sylgard 184 模具铸造法,软光刻,3D打印,激光切割 过氧化氢电池 章鱼:抬腿 仿生狮子鱼[53 ] 硅橡胶:Dragonskin 20;石墨 模具铸造法,3D打印 碘化锌电池液 鱼:游动 单次跳跃机器人[54 ] 硅橡胶:M4601 软光刻,3D打印 丁烷燃料电池 跳跃 机械鳗鱼[68 ] 硅橡胶:Ecoflex 0030,Dragon Skin 0010 软光刻,3D打印 齿轮泵 游动 SMA四足机器人[69 ] SMA、导热弹性体 − 锂聚合物电池 跑动 介电弹性体驱动鳐鱼[70 ] PDMS:Sylgard 184;水凝胶 模具铸造法 介电弹性体 鳐:游动 仿生蚯蚓[71 ] SMA、聚醚醚酮树脂 − 锂聚合物电池 蚯蚓:蠕动 DE驱动乌贼[72 ] 介电弹性体 − 锂聚合物电池 乌贼:喷射前进
2.2. 制造方法 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
... 3D打印柔软材料的制作速度较快,省去了设计模具及其他多个步骤,直接从下而上自组装出执行器原型,并可以快速地在原型设计中进行修改,无须修改特殊模具[78 ] . 不同的3D打印技术(如直写打印、喷墨打印及光固化打印)都能够使用软材料,并且很多研究人员都使用3D打印直接制作了弯曲执行器[14 , 79 -80 ] ,但使用的材料弹性模量数量级都高于107 Pa,并不能达到软组织、肌肉的柔软程度. 如图8 所示,Wehner等[52 ] 使用包括3D打印的多种制作方式来制作集成化软体机器人Octopus. 将预制的微流体控制器放入模具中,倒入硅橡胶,待硅橡胶固化后,通过嵌入式3D打印的方式将水性油墨打印到硅橡胶基质中;在基质材料交联后,当水蒸发并扩散穿过基质时,水性油墨在升高的温度下“自动排空”,留下了与软控制器连接的开放通道网络. 目前还没有使用3D打印直接制作集成化智能软体机器人躯体的实例,但是随着3D打印突破多材料多喷头技术瓶颈[81 ] ,如果能够规划好动力系统、执行系统及其他系统的材料及位置,直接打印出集成化智能软体机器人将有望实现,这会给软体机器人的商业化提供极大的便利. ...
... Octopus制作流程[52 ] ...
... Production process of Octopus[52 ] ...
Electrolytic vascular systems for energy-dense robots
3
2019
... 化学反应驱动可以绕过对电能的需要,利用化学反应产生的能量为软材料驱动器提供压强,例如氧化物反应[49 ] 和碳氢化合物燃烧[50 -51 ] . 集成化滚动机器人使用过氧化氢分解产生氧气作为压力介质,按需提供压力,称之为“气动电池”[49 ] . 如图4 所示为“气动电池”的原理,过氧化氢与催化剂接触释放氧气;在气压升高后,一部分气体从疏水膜排出,另一部分气体挤压左侧的偏转器,阻止过氧化氢和催化剂接触,使反应停止. 仿生章鱼机器人(Octopus)同样利用过氧化氢通过催化作用转变成大量气体,这些气体流入仿生章鱼机器人触手的微流体孔道,给触手充气从而引发运动[52 ] . 除了过氧化氢分解驱动外,还有一款由碘化锌电池液驱动的集成化仿生狮子鱼,锌在放电时释放出电子和锌离子. 电子流动产生的电流为电子部分供电,电解质作为液压系统的工作介质相当于液压油,用于驱动鱼鳍、鱼尾摆动[53 ] . 使用过氧化氢和碘化锌电解液的化学反应驱动方式反应过程安全且安静,当原料耗尽时填加简便[54 ] . ...
... Material,production,energy source and movement posture of integrated intelligent soft robots
Tab.1 名称 材料 制造工艺 能量来源 运动方式 四足爬行机器人[23 ] 硅橡胶:Elastosil M4601,Ecoflex 0030 软光刻 微型气泵 海星:爬行 流体驱动仿生鱼[25 ] 硅橡胶:Mold Star 15 模具铸造法 微型液压泵 鱼:游动 仿生海星[28 ] 硅橡胶:Dragonskin 10;SMA 铸造法,3D打印 锂聚合物电池 海星:水下行走 仿生蛇[32 ] 硅橡胶 模具铸造法 微型气泵 蛇:爬行 六足行走机器人[33 ] 硅橡胶:Ecoflex 30 模具铸造法 微型气泵 行走 仿蛇爬行机器人[34 ] 硅橡胶:Ecoflex 0030 激光切割,模具铸造法 微型气泵 蛇:爬行 仿生青蛙[35 ] 硅橡胶:Ecoflex 0050;PDMS:Sylgard 184 模具铸造法,3D打印 高压CO2 气瓶 青蛙:游动 仿生乌贼[36 ] 硅橡胶:Ecoflex 0030 模具铸造法,3D打印 高压CO2 气瓶 乌贼:喷射前进 机械鳐鱼[43 ] SMA;聚氯乙烯 − 锂聚合物电池 鳐:游动 仿生水蛇[44 ] SMA;聚氨酯 − 锂聚合物电池 蛇:游动 IPMC驱动仿生鱼[45 ] IPMC − 锂聚合物电池 鱼:游动 仿生蝠鲼[47 ] IPMC;PDMS 模具铸造法 锂聚合物电池 蝠鲼:游动 仿生魔鬼鱼[48 ] IPMC;PDMS 模具铸造法,3D打印 锂聚合物电池 魔鬼鱼:游动 滚动机器人[49 ] 硅橡胶:Ecoflex 0030 模具铸造法 过氧化氢电池 滚动 多次跳跃机器人[50 ] 类橡胶 3D打印 丁烷燃料电池 跳跃 Octopus[52 ] 硅橡胶:Ecoflex 30;PDMS:Sylgard 184 模具铸造法,软光刻,3D打印,激光切割 过氧化氢电池 章鱼:抬腿 仿生狮子鱼[53 ] 硅橡胶:Dragonskin 20;石墨 模具铸造法,3D打印 碘化锌电池液 鱼:游动 单次跳跃机器人[54 ] 硅橡胶:M4601 软光刻,3D打印 丁烷燃料电池 跳跃 机械鳗鱼[68 ] 硅橡胶:Ecoflex 0030,Dragon Skin 0010 软光刻,3D打印 齿轮泵 游动 SMA四足机器人[69 ] SMA、导热弹性体 − 锂聚合物电池 跑动 介电弹性体驱动鳐鱼[70 ] PDMS:Sylgard 184;水凝胶 模具铸造法 介电弹性体 鳐:游动 仿生蚯蚓[71 ] SMA、聚醚醚酮树脂 − 锂聚合物电池 蚯蚓:蠕动 DE驱动乌贼[72 ] 介电弹性体 − 锂聚合物电池 乌贼:喷射前进
2.2. 制造方法 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
... 在水中生活的动物,大多数都是以游泳的运动方式,通过鳍或身体附肢的摆动产生动力,克服水的阻力来运动. 鱼类中表现出的特殊行为是逃生反应,需要鱼类将身体快速弯曲到大角度,以便加速远离不利的外部刺激[87 -88 ] . 以液体介质驱动鱼尾摆动的远程人工操作软体机械鱼,身体几乎完全由硅橡胶组成,能够实现模仿鱼类向前游进和逃生反应运动[26 , 77 ] (见图10(a) ). 另一款仿生狮子鱼除了外形、运动方式和狮子鱼极为相像外,最大的亮点是自身能量循环系统. 仿生血管系统以氧化还原液流电池为能量来源,将液压传递、致动和能量存储的功能整合到单个集成设计中,从而成几何倍数地增加了机器人的能量密度,可以实现长达36 h的连续运转[53 ] (见图10(b) ). 除了利用尾鳍摆动产生动力的机器人外,还有模仿水蛇摆动身体前进或者模仿鳐鱼利用胸鳍摆动产生动力的机器人. 将SMA嵌入高分子聚合物(聚氨酯)中作为仿生水蛇的身体,通电时SMA弯曲,弹性能量被储存在弹性基板中;停止通电,弹性能量被释放出来驱动返回运动,就像蛇一样弯蜒运动[44 ] (见图10(c) ). 按照同样的驱动原理,研究人员模仿鳐鱼的游动方式制作了软体机器人,机器人主体分为背盖、中板、腹盖三部分,2个胸鳍由嵌入SMA的塑料板组成,能够较好地实现前进、转弯动作[43 ] (见图10(d) ). 如图10(e) 所示的仿生鳐鱼主要由介电弹性体和水凝胶组成,除了优秀的运动能力外还有着良好透明性、持久性和温度耐受性[70 ] . ...
An untethered, jumping roly-poly soft robot driven by combustion
4
2015
... 化学反应驱动可以绕过对电能的需要,利用化学反应产生的能量为软材料驱动器提供压强,例如氧化物反应[49 ] 和碳氢化合物燃烧[50 -51 ] . 集成化滚动机器人使用过氧化氢分解产生氧气作为压力介质,按需提供压力,称之为“气动电池”[49 ] . 如图4 所示为“气动电池”的原理,过氧化氢与催化剂接触释放氧气;在气压升高后,一部分气体从疏水膜排出,另一部分气体挤压左侧的偏转器,阻止过氧化氢和催化剂接触,使反应停止. 仿生章鱼机器人(Octopus)同样利用过氧化氢通过催化作用转变成大量气体,这些气体流入仿生章鱼机器人触手的微流体孔道,给触手充气从而引发运动[52 ] . 除了过氧化氢分解驱动外,还有一款由碘化锌电池液驱动的集成化仿生狮子鱼,锌在放电时释放出电子和锌离子. 电子流动产生的电流为电子部分供电,电解质作为液压系统的工作介质相当于液压油,用于驱动鱼鳍、鱼尾摆动[53 ] . 使用过氧化氢和碘化锌电解液的化学反应驱动方式反应过程安全且安静,当原料耗尽时填加简便[54 ] . ...
... Material,production,energy source and movement posture of integrated intelligent soft robots
Tab.1 名称 材料 制造工艺 能量来源 运动方式 四足爬行机器人[23 ] 硅橡胶:Elastosil M4601,Ecoflex 0030 软光刻 微型气泵 海星:爬行 流体驱动仿生鱼[25 ] 硅橡胶:Mold Star 15 模具铸造法 微型液压泵 鱼:游动 仿生海星[28 ] 硅橡胶:Dragonskin 10;SMA 铸造法,3D打印 锂聚合物电池 海星:水下行走 仿生蛇[32 ] 硅橡胶 模具铸造法 微型气泵 蛇:爬行 六足行走机器人[33 ] 硅橡胶:Ecoflex 30 模具铸造法 微型气泵 行走 仿蛇爬行机器人[34 ] 硅橡胶:Ecoflex 0030 激光切割,模具铸造法 微型气泵 蛇:爬行 仿生青蛙[35 ] 硅橡胶:Ecoflex 0050;PDMS:Sylgard 184 模具铸造法,3D打印 高压CO2 气瓶 青蛙:游动 仿生乌贼[36 ] 硅橡胶:Ecoflex 0030 模具铸造法,3D打印 高压CO2 气瓶 乌贼:喷射前进 机械鳐鱼[43 ] SMA;聚氯乙烯 − 锂聚合物电池 鳐:游动 仿生水蛇[44 ] SMA;聚氨酯 − 锂聚合物电池 蛇:游动 IPMC驱动仿生鱼[45 ] IPMC − 锂聚合物电池 鱼:游动 仿生蝠鲼[47 ] IPMC;PDMS 模具铸造法 锂聚合物电池 蝠鲼:游动 仿生魔鬼鱼[48 ] IPMC;PDMS 模具铸造法,3D打印 锂聚合物电池 魔鬼鱼:游动 滚动机器人[49 ] 硅橡胶:Ecoflex 0030 模具铸造法 过氧化氢电池 滚动 多次跳跃机器人[50 ] 类橡胶 3D打印 丁烷燃料电池 跳跃 Octopus[52 ] 硅橡胶:Ecoflex 30;PDMS:Sylgard 184 模具铸造法,软光刻,3D打印,激光切割 过氧化氢电池 章鱼:抬腿 仿生狮子鱼[53 ] 硅橡胶:Dragonskin 20;石墨 模具铸造法,3D打印 碘化锌电池液 鱼:游动 单次跳跃机器人[54 ] 硅橡胶:M4601 软光刻,3D打印 丁烷燃料电池 跳跃 机械鳗鱼[68 ] 硅橡胶:Ecoflex 0030,Dragon Skin 0010 软光刻,3D打印 齿轮泵 游动 SMA四足机器人[69 ] SMA、导热弹性体 − 锂聚合物电池 跑动 介电弹性体驱动鳐鱼[70 ] PDMS:Sylgard 184;水凝胶 模具铸造法 介电弹性体 鳐:游动 仿生蚯蚓[71 ] SMA、聚醚醚酮树脂 − 锂聚合物电池 蚯蚓:蠕动 DE驱动乌贼[72 ] 介电弹性体 − 锂聚合物电池 乌贼:喷射前进
2.2. 制造方法 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
... 软光刻技术是利用光刻胶感光后发生光化学反应而产生耐蚀性的特点,将掩模版上的图案刻制到被加工表面上的技术. 在制作软体机器人的过程中,通常将PDMS材料倒在带有图案的硅晶片上,借助电子元件让光照射模具的表面,使覆盖在图案上的一层薄薄的高分子膜曝光,然后溶解没有图案的区域[76 ] . 软光刻技术被用来直接制备带有气体栅格通道的机器人主体[23 ] 和跳跃机器人的执行器[54 ] ,在仿生水蛇的多节软执行器的制作中也使用了软光刻技术[68 ] . 软光刻技术应用在软体机器人的最早阶段,Marchese称这种制作工艺制作出的软体结构为2.5D的,因为制作的软体结构较大程度上被限制在平面上[77 ] . 经过逐渐发展,通过将软光刻制作的各层精确对齐黏合,能够得到具有嵌入式微流体通路和几乎任意复杂轮廓的柔软层,也形成了更加立体化的软体机器人. 如图7 所示为软体仿生蜘蛛[76 ] 的软光刻制作流程,将PDMS倒在有特殊图案的硅晶片上;在经过曝光、脱气和旋涂处理后,将PDMS层从黏合剂基底剥离;根据特定设计图案,使用精密激光微加工系统切割弹性体;将以上步骤重复12次,制备12个不同的PDMS层;将这些PDMS层黏合,组成软体仿生蜘蛛. ...
... 为了探索更加敏捷的软体机器人,Bartlett等[50 ] 设计了多次跳跃机器人(见图9(f) ),填充一次燃料可以完成21次定向跳跃,相比单次跳跃机器人[54 ] (见图9(e) )有了较大进步,并且在接触地的部分也设计成从软到硬的材料过渡,通过在柔软材料界面处减少应力来减轻压力,极好地利用了橡胶的抗冲击性. 跳跃机器人须集成执行系统、驱动系统以及控制系统,极快的响应速度会让外界供给能量或信号的系缆成为负担. 目前软体机器人使用燃烧推动方式的能量转换效率往往低于1%,减少燃烧过程的能量浪费是未来研究的重要课题. ...
1
... Bartlett等[50 ] 和Michael等[55 ] 利用丁烷和氧气燃烧产生推力,使机器人的气腔迅速膨胀,以此为动力源设计的集成化跳跃机器人分别可以跳起自身身高6.0、7.5倍的高度. 这种燃烧驱动的明显优点是碳氢化合物的能量密度高于电池,但是燃烧爆炸的方式难以控制力度和方向,须提前设计好具体能效[56 ] . 可燃气体可以提供迅速的执行速度,但是也对柔软材料和密封件有更高要求. 除此之外燃烧驱动还有一个难题,就是动作发生通常为一次性的,如要连续跳跃,就需要复杂的内部结构,这势必会增加重量,影响运动效果. ...
软体驱动器研究综述
1
2019
... Bartlett等[50 ] 和Michael等[55 ] 利用丁烷和氧气燃烧产生推力,使机器人的气腔迅速膨胀,以此为动力源设计的集成化跳跃机器人分别可以跳起自身身高6.0、7.5倍的高度. 这种燃烧驱动的明显优点是碳氢化合物的能量密度高于电池,但是燃烧爆炸的方式难以控制力度和方向,须提前设计好具体能效[56 ] . 可燃气体可以提供迅速的执行速度,但是也对柔软材料和密封件有更高要求. 除此之外燃烧驱动还有一个难题,就是动作发生通常为一次性的,如要连续跳跃,就需要复杂的内部结构,这势必会增加重量,影响运动效果. ...
软体驱动器研究综述
1
2019
... Bartlett等[50 ] 和Michael等[55 ] 利用丁烷和氧气燃烧产生推力,使机器人的气腔迅速膨胀,以此为动力源设计的集成化跳跃机器人分别可以跳起自身身高6.0、7.5倍的高度. 这种燃烧驱动的明显优点是碳氢化合物的能量密度高于电池,但是燃烧爆炸的方式难以控制力度和方向,须提前设计好具体能效[56 ] . 可燃气体可以提供迅速的执行速度,但是也对柔软材料和密封件有更高要求. 除此之外燃烧驱动还有一个难题,就是动作发生通常为一次性的,如要连续跳跃,就需要复杂的内部结构,这势必会增加重量,影响运动效果. ...
Hydraulic hydrogel actuators and robots optically and sonically camouflaged in water
1
2017
... 水凝胶极柔软、湿润、排异性小,适合用在与人接触的环境中[57 ] . 但是用水凝胶制作的机器人躯体容易破裂,外表有黏性不宜在空气中使用,所以使用水凝胶的机器人较少. 硅橡胶和PDMS都属于弹性高分子材料,弹性模量和软组织、肌肉相近,在柔软之余有较大的弹性,多数软体机器人的软弹性都来源于这2种材料. 一些软体机器人使用的介电弹性体是由硅橡胶、PDMS混合导电填料制备的[15 -16 , 58 ] ,在电场作用下才能产生驱动力与驱动变形. 介电弹性体作为新型电活性聚合物,具有弹性能量密度高、响应速度快的优点,但是对高驱动电压的需要限制了其在软体机器人中的应用[59 -60 ] . 除了这些具有较好软弹性的材料外,尼龙织物[61 -62 ] 、纤维[63 -65 ] 、卡纸[66 ] 、弹簧[67 ] 等材料常用来包裹在弹性高分子材料外部,起到增强、限制或保护的作用. 金属材料主要包括SMA、IPMC,除了能够作为躯体的组成部分,也是集成化软体机器人的动力来源. ...
Hydraulically amplified self-healing electrostatic actuators with muscle-like performance
1
2018
... 水凝胶极柔软、湿润、排异性小,适合用在与人接触的环境中[57 ] . 但是用水凝胶制作的机器人躯体容易破裂,外表有黏性不宜在空气中使用,所以使用水凝胶的机器人较少. 硅橡胶和PDMS都属于弹性高分子材料,弹性模量和软组织、肌肉相近,在柔软之余有较大的弹性,多数软体机器人的软弹性都来源于这2种材料. 一些软体机器人使用的介电弹性体是由硅橡胶、PDMS混合导电填料制备的[15 -16 , 58 ] ,在电场作用下才能产生驱动力与驱动变形. 介电弹性体作为新型电活性聚合物,具有弹性能量密度高、响应速度快的优点,但是对高驱动电压的需要限制了其在软体机器人中的应用[59 -60 ] . 除了这些具有较好软弹性的材料外,尼龙织物[61 -62 ] 、纤维[63 -65 ] 、卡纸[66 ] 、弹簧[67 ] 等材料常用来包裹在弹性高分子材料外部,起到增强、限制或保护的作用. 金属材料主要包括SMA、IPMC,除了能够作为躯体的组成部分,也是集成化软体机器人的动力来源. ...
介电弹性体智能材料的研究进展
1
2016
... 水凝胶极柔软、湿润、排异性小,适合用在与人接触的环境中[57 ] . 但是用水凝胶制作的机器人躯体容易破裂,外表有黏性不宜在空气中使用,所以使用水凝胶的机器人较少. 硅橡胶和PDMS都属于弹性高分子材料,弹性模量和软组织、肌肉相近,在柔软之余有较大的弹性,多数软体机器人的软弹性都来源于这2种材料. 一些软体机器人使用的介电弹性体是由硅橡胶、PDMS混合导电填料制备的[15 -16 , 58 ] ,在电场作用下才能产生驱动力与驱动变形. 介电弹性体作为新型电活性聚合物,具有弹性能量密度高、响应速度快的优点,但是对高驱动电压的需要限制了其在软体机器人中的应用[59 -60 ] . 除了这些具有较好软弹性的材料外,尼龙织物[61 -62 ] 、纤维[63 -65 ] 、卡纸[66 ] 、弹簧[67 ] 等材料常用来包裹在弹性高分子材料外部,起到增强、限制或保护的作用. 金属材料主要包括SMA、IPMC,除了能够作为躯体的组成部分,也是集成化软体机器人的动力来源. ...
介电弹性体智能材料的研究进展
1
2016
... 水凝胶极柔软、湿润、排异性小,适合用在与人接触的环境中[57 ] . 但是用水凝胶制作的机器人躯体容易破裂,外表有黏性不宜在空气中使用,所以使用水凝胶的机器人较少. 硅橡胶和PDMS都属于弹性高分子材料,弹性模量和软组织、肌肉相近,在柔软之余有较大的弹性,多数软体机器人的软弹性都来源于这2种材料. 一些软体机器人使用的介电弹性体是由硅橡胶、PDMS混合导电填料制备的[15 -16 , 58 ] ,在电场作用下才能产生驱动力与驱动变形. 介电弹性体作为新型电活性聚合物,具有弹性能量密度高、响应速度快的优点,但是对高驱动电压的需要限制了其在软体机器人中的应用[59 -60 ] . 除了这些具有较好软弹性的材料外,尼龙织物[61 -62 ] 、纤维[63 -65 ] 、卡纸[66 ] 、弹簧[67 ] 等材料常用来包裹在弹性高分子材料外部,起到增强、限制或保护的作用. 金属材料主要包括SMA、IPMC,除了能够作为躯体的组成部分,也是集成化软体机器人的动力来源. ...
3D printing antagonistic systems of artificial muscle using projection stereolithography
1
2015
... 水凝胶极柔软、湿润、排异性小,适合用在与人接触的环境中[57 ] . 但是用水凝胶制作的机器人躯体容易破裂,外表有黏性不宜在空气中使用,所以使用水凝胶的机器人较少. 硅橡胶和PDMS都属于弹性高分子材料,弹性模量和软组织、肌肉相近,在柔软之余有较大的弹性,多数软体机器人的软弹性都来源于这2种材料. 一些软体机器人使用的介电弹性体是由硅橡胶、PDMS混合导电填料制备的[15 -16 , 58 ] ,在电场作用下才能产生驱动力与驱动变形. 介电弹性体作为新型电活性聚合物,具有弹性能量密度高、响应速度快的优点,但是对高驱动电压的需要限制了其在软体机器人中的应用[59 -60 ] . 除了这些具有较好软弹性的材料外,尼龙织物[61 -62 ] 、纤维[63 -65 ] 、卡纸[66 ] 、弹簧[67 ] 等材料常用来包裹在弹性高分子材料外部,起到增强、限制或保护的作用. 金属材料主要包括SMA、IPMC,除了能够作为躯体的组成部分,也是集成化软体机器人的动力来源. ...
1
... 水凝胶极柔软、湿润、排异性小,适合用在与人接触的环境中[57 ] . 但是用水凝胶制作的机器人躯体容易破裂,外表有黏性不宜在空气中使用,所以使用水凝胶的机器人较少. 硅橡胶和PDMS都属于弹性高分子材料,弹性模量和软组织、肌肉相近,在柔软之余有较大的弹性,多数软体机器人的软弹性都来源于这2种材料. 一些软体机器人使用的介电弹性体是由硅橡胶、PDMS混合导电填料制备的[15 -16 , 58 ] ,在电场作用下才能产生驱动力与驱动变形. 介电弹性体作为新型电活性聚合物,具有弹性能量密度高、响应速度快的优点,但是对高驱动电压的需要限制了其在软体机器人中的应用[59 -60 ] . 除了这些具有较好软弹性的材料外,尼龙织物[61 -62 ] 、纤维[63 -65 ] 、卡纸[66 ] 、弹簧[67 ] 等材料常用来包裹在弹性高分子材料外部,起到增强、限制或保护的作用. 金属材料主要包括SMA、IPMC,除了能够作为躯体的组成部分,也是集成化软体机器人的动力来源. ...
A novel fabric-based versatile and stiffness-tunable soft gripper integrating soft pneumatic fingers and wrist
1
2019
... 水凝胶极柔软、湿润、排异性小,适合用在与人接触的环境中[57 ] . 但是用水凝胶制作的机器人躯体容易破裂,外表有黏性不宜在空气中使用,所以使用水凝胶的机器人较少. 硅橡胶和PDMS都属于弹性高分子材料,弹性模量和软组织、肌肉相近,在柔软之余有较大的弹性,多数软体机器人的软弹性都来源于这2种材料. 一些软体机器人使用的介电弹性体是由硅橡胶、PDMS混合导电填料制备的[15 -16 , 58 ] ,在电场作用下才能产生驱动力与驱动变形. 介电弹性体作为新型电活性聚合物,具有弹性能量密度高、响应速度快的优点,但是对高驱动电压的需要限制了其在软体机器人中的应用[59 -60 ] . 除了这些具有较好软弹性的材料外,尼龙织物[61 -62 ] 、纤维[63 -65 ] 、卡纸[66 ] 、弹簧[67 ] 等材料常用来包裹在弹性高分子材料外部,起到增强、限制或保护的作用. 金属材料主要包括SMA、IPMC,除了能够作为躯体的组成部分,也是集成化软体机器人的动力来源. ...
Soft robotic grippers for biological sampling on deep reefs
1
2016
... 水凝胶极柔软、湿润、排异性小,适合用在与人接触的环境中[57 ] . 但是用水凝胶制作的机器人躯体容易破裂,外表有黏性不宜在空气中使用,所以使用水凝胶的机器人较少. 硅橡胶和PDMS都属于弹性高分子材料,弹性模量和软组织、肌肉相近,在柔软之余有较大的弹性,多数软体机器人的软弹性都来源于这2种材料. 一些软体机器人使用的介电弹性体是由硅橡胶、PDMS混合导电填料制备的[15 -16 , 58 ] ,在电场作用下才能产生驱动力与驱动变形. 介电弹性体作为新型电活性聚合物,具有弹性能量密度高、响应速度快的优点,但是对高驱动电压的需要限制了其在软体机器人中的应用[59 -60 ] . 除了这些具有较好软弹性的材料外,尼龙织物[61 -62 ] 、纤维[63 -65 ] 、卡纸[66 ] 、弹簧[67 ] 等材料常用来包裹在弹性高分子材料外部,起到增强、限制或保护的作用. 金属材料主要包括SMA、IPMC,除了能够作为躯体的组成部分,也是集成化软体机器人的动力来源. ...
Modeling of soft fiber-reinforced bending actuators
1
2015
... 水凝胶极柔软、湿润、排异性小,适合用在与人接触的环境中[57 ] . 但是用水凝胶制作的机器人躯体容易破裂,外表有黏性不宜在空气中使用,所以使用水凝胶的机器人较少. 硅橡胶和PDMS都属于弹性高分子材料,弹性模量和软组织、肌肉相近,在柔软之余有较大的弹性,多数软体机器人的软弹性都来源于这2种材料. 一些软体机器人使用的介电弹性体是由硅橡胶、PDMS混合导电填料制备的[15 -16 , 58 ] ,在电场作用下才能产生驱动力与驱动变形. 介电弹性体作为新型电活性聚合物,具有弹性能量密度高、响应速度快的优点,但是对高驱动电压的需要限制了其在软体机器人中的应用[59 -60 ] . 除了这些具有较好软弹性的材料外,尼龙织物[61 -62 ] 、纤维[63 -65 ] 、卡纸[66 ] 、弹簧[67 ] 等材料常用来包裹在弹性高分子材料外部,起到增强、限制或保护的作用. 金属材料主要包括SMA、IPMC,除了能够作为躯体的组成部分,也是集成化软体机器人的动力来源. ...
Design and analysis of a soft pneumatic actuator with origami shell reinforcement
1
2016
... 水凝胶极柔软、湿润、排异性小,适合用在与人接触的环境中[57 ] . 但是用水凝胶制作的机器人躯体容易破裂,外表有黏性不宜在空气中使用,所以使用水凝胶的机器人较少. 硅橡胶和PDMS都属于弹性高分子材料,弹性模量和软组织、肌肉相近,在柔软之余有较大的弹性,多数软体机器人的软弹性都来源于这2种材料. 一些软体机器人使用的介电弹性体是由硅橡胶、PDMS混合导电填料制备的[15 -16 , 58 ] ,在电场作用下才能产生驱动力与驱动变形. 介电弹性体作为新型电活性聚合物,具有弹性能量密度高、响应速度快的优点,但是对高驱动电压的需要限制了其在软体机器人中的应用[59 -60 ] . 除了这些具有较好软弹性的材料外,尼龙织物[61 -62 ] 、纤维[63 -65 ] 、卡纸[66 ] 、弹簧[67 ] 等材料常用来包裹在弹性高分子材料外部,起到增强、限制或保护的作用. 金属材料主要包括SMA、IPMC,除了能够作为躯体的组成部分,也是集成化软体机器人的动力来源. ...
A versatile soft crawling robot with rapid locomotion
1
2019
... 水凝胶极柔软、湿润、排异性小,适合用在与人接触的环境中[57 ] . 但是用水凝胶制作的机器人躯体容易破裂,外表有黏性不宜在空气中使用,所以使用水凝胶的机器人较少. 硅橡胶和PDMS都属于弹性高分子材料,弹性模量和软组织、肌肉相近,在柔软之余有较大的弹性,多数软体机器人的软弹性都来源于这2种材料. 一些软体机器人使用的介电弹性体是由硅橡胶、PDMS混合导电填料制备的[15 -16 , 58 ] ,在电场作用下才能产生驱动力与驱动变形. 介电弹性体作为新型电活性聚合物,具有弹性能量密度高、响应速度快的优点,但是对高驱动电压的需要限制了其在软体机器人中的应用[59 -60 ] . 除了这些具有较好软弹性的材料外,尼龙织物[61 -62 ] 、纤维[63 -65 ] 、卡纸[66 ] 、弹簧[67 ] 等材料常用来包裹在弹性高分子材料外部,起到增强、限制或保护的作用. 金属材料主要包括SMA、IPMC,除了能够作为躯体的组成部分,也是集成化软体机器人的动力来源. ...
Body wave generation for anguilliform locomotion using a fiber-reinforced soft fluidic elastomer actuator array toward the development of the eel-inspired underwater soft robot
3
2020
... 如图5(a) 所示,利用硅橡胶制备4个双向流动弹性体驱动器,串联起来构成集成智能化仿生蛇的身体[32 ] . 在模仿蛇、鱼、蠕虫等周期性扭曲身体的动作时,研究人员将执行器制作成对称双腔结构,让流体规律地双向流动达到摆动的效果. 利用相同的思路,使用Ecoflex 0030(硅橡胶)串联4个双向弯曲的Dragon Skin 0010(硅橡胶)驱动器,可以在水中波状游动,形似鳗鱼[68 ] . 在设计滚动机器人前,研究人员首先测试了如图5(b) 所示的硅橡胶制作的双向流体驱动器组合后的弯曲效果,确保6个驱动器在呈圆周排列时,能够实现滚动前进[49 ] . 如图5(c) 所示为仿生乌贼[36 -37 ] 上鱼鳍在展开状态和折叠状态的示意图,展开状态通常在喷射前进和滑翔阶段使用,折叠状态则在入水时使用,硅橡胶不仅提供给鱼鳍较好的弯折能力,也在受到阻力时提供了足够的韧性. 硅橡胶和PDMS还可以包裹在智能驱动材料外部,保护SMA和IPMC在外界冲击下不会损坏,如图5(d) 所示为集成化仿生海星使用的硅橡胶包裹SMA软执行器. 一些研究组在集成化智能软体机器人的材料设计上以弹性体高分子材料作基底,同时使用纤维材料进行增强,并在一侧加入不可延展的材料作为应变限制层,好比是动物的韧带[30 ] ,限制着运动范围,机器人在能量释放后被动地恢复原状. 应变限制层使用的材料不是绝对的,只要与延展层材料弹性区分明显,容易黏合即可. Fan等[35 ] 用纤维缠绕硅橡胶制作执行器,并在外侧嵌合应变限制层限制运动范围,执行器在压力释放后被动地恢复弯曲,如图5(e) 所示. 值得一提的是,大部分软体执行器都是在加压时发生弯曲,而这一组恰恰相反,在加压时执行器弯曲角度大幅减小,能够更好地模仿青蛙的蹬腿动作. ...
... Material,production,energy source and movement posture of integrated intelligent soft robots
Tab.1 名称 材料 制造工艺 能量来源 运动方式 四足爬行机器人[23 ] 硅橡胶:Elastosil M4601,Ecoflex 0030 软光刻 微型气泵 海星:爬行 流体驱动仿生鱼[25 ] 硅橡胶:Mold Star 15 模具铸造法 微型液压泵 鱼:游动 仿生海星[28 ] 硅橡胶:Dragonskin 10;SMA 铸造法,3D打印 锂聚合物电池 海星:水下行走 仿生蛇[32 ] 硅橡胶 模具铸造法 微型气泵 蛇:爬行 六足行走机器人[33 ] 硅橡胶:Ecoflex 30 模具铸造法 微型气泵 行走 仿蛇爬行机器人[34 ] 硅橡胶:Ecoflex 0030 激光切割,模具铸造法 微型气泵 蛇:爬行 仿生青蛙[35 ] 硅橡胶:Ecoflex 0050;PDMS:Sylgard 184 模具铸造法,3D打印 高压CO2 气瓶 青蛙:游动 仿生乌贼[36 ] 硅橡胶:Ecoflex 0030 模具铸造法,3D打印 高压CO2 气瓶 乌贼:喷射前进 机械鳐鱼[43 ] SMA;聚氯乙烯 − 锂聚合物电池 鳐:游动 仿生水蛇[44 ] SMA;聚氨酯 − 锂聚合物电池 蛇:游动 IPMC驱动仿生鱼[45 ] IPMC − 锂聚合物电池 鱼:游动 仿生蝠鲼[47 ] IPMC;PDMS 模具铸造法 锂聚合物电池 蝠鲼:游动 仿生魔鬼鱼[48 ] IPMC;PDMS 模具铸造法,3D打印 锂聚合物电池 魔鬼鱼:游动 滚动机器人[49 ] 硅橡胶:Ecoflex 0030 模具铸造法 过氧化氢电池 滚动 多次跳跃机器人[50 ] 类橡胶 3D打印 丁烷燃料电池 跳跃 Octopus[52 ] 硅橡胶:Ecoflex 30;PDMS:Sylgard 184 模具铸造法,软光刻,3D打印,激光切割 过氧化氢电池 章鱼:抬腿 仿生狮子鱼[53 ] 硅橡胶:Dragonskin 20;石墨 模具铸造法,3D打印 碘化锌电池液 鱼:游动 单次跳跃机器人[54 ] 硅橡胶:M4601 软光刻,3D打印 丁烷燃料电池 跳跃 机械鳗鱼[68 ] 硅橡胶:Ecoflex 0030,Dragon Skin 0010 软光刻,3D打印 齿轮泵 游动 SMA四足机器人[69 ] SMA、导热弹性体 − 锂聚合物电池 跑动 介电弹性体驱动鳐鱼[70 ] PDMS:Sylgard 184;水凝胶 模具铸造法 介电弹性体 鳐:游动 仿生蚯蚓[71 ] SMA、聚醚醚酮树脂 − 锂聚合物电池 蚯蚓:蠕动 DE驱动乌贼[72 ] 介电弹性体 − 锂聚合物电池 乌贼:喷射前进
2.2. 制造方法 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
... 软光刻技术是利用光刻胶感光后发生光化学反应而产生耐蚀性的特点,将掩模版上的图案刻制到被加工表面上的技术. 在制作软体机器人的过程中,通常将PDMS材料倒在带有图案的硅晶片上,借助电子元件让光照射模具的表面,使覆盖在图案上的一层薄薄的高分子膜曝光,然后溶解没有图案的区域[76 ] . 软光刻技术被用来直接制备带有气体栅格通道的机器人主体[23 ] 和跳跃机器人的执行器[54 ] ,在仿生水蛇的多节软执行器的制作中也使用了软光刻技术[68 ] . 软光刻技术应用在软体机器人的最早阶段,Marchese称这种制作工艺制作出的软体结构为2.5D的,因为制作的软体结构较大程度上被限制在平面上[77 ] . 经过逐渐发展,通过将软光刻制作的各层精确对齐黏合,能够得到具有嵌入式微流体通路和几乎任意复杂轮廓的柔软层,也形成了更加立体化的软体机器人. 如图7 所示为软体仿生蜘蛛[76 ] 的软光刻制作流程,将PDMS倒在有特殊图案的硅晶片上;在经过曝光、脱气和旋涂处理后,将PDMS层从黏合剂基底剥离;根据特定设计图案,使用精密激光微加工系统切割弹性体;将以上步骤重复12次,制备12个不同的PDMS层;将这些PDMS层黏合,组成软体仿生蜘蛛. ...
Chasing biomimetic locomotion speeds: creating untethered soft robots with shape memory alloy actuators
2
2018
... Material,production,energy source and movement posture of integrated intelligent soft robots
Tab.1 名称 材料 制造工艺 能量来源 运动方式 四足爬行机器人[23 ] 硅橡胶:Elastosil M4601,Ecoflex 0030 软光刻 微型气泵 海星:爬行 流体驱动仿生鱼[25 ] 硅橡胶:Mold Star 15 模具铸造法 微型液压泵 鱼:游动 仿生海星[28 ] 硅橡胶:Dragonskin 10;SMA 铸造法,3D打印 锂聚合物电池 海星:水下行走 仿生蛇[32 ] 硅橡胶 模具铸造法 微型气泵 蛇:爬行 六足行走机器人[33 ] 硅橡胶:Ecoflex 30 模具铸造法 微型气泵 行走 仿蛇爬行机器人[34 ] 硅橡胶:Ecoflex 0030 激光切割,模具铸造法 微型气泵 蛇:爬行 仿生青蛙[35 ] 硅橡胶:Ecoflex 0050;PDMS:Sylgard 184 模具铸造法,3D打印 高压CO2 气瓶 青蛙:游动 仿生乌贼[36 ] 硅橡胶:Ecoflex 0030 模具铸造法,3D打印 高压CO2 气瓶 乌贼:喷射前进 机械鳐鱼[43 ] SMA;聚氯乙烯 − 锂聚合物电池 鳐:游动 仿生水蛇[44 ] SMA;聚氨酯 − 锂聚合物电池 蛇:游动 IPMC驱动仿生鱼[45 ] IPMC − 锂聚合物电池 鱼:游动 仿生蝠鲼[47 ] IPMC;PDMS 模具铸造法 锂聚合物电池 蝠鲼:游动 仿生魔鬼鱼[48 ] IPMC;PDMS 模具铸造法,3D打印 锂聚合物电池 魔鬼鱼:游动 滚动机器人[49 ] 硅橡胶:Ecoflex 0030 模具铸造法 过氧化氢电池 滚动 多次跳跃机器人[50 ] 类橡胶 3D打印 丁烷燃料电池 跳跃 Octopus[52 ] 硅橡胶:Ecoflex 30;PDMS:Sylgard 184 模具铸造法,软光刻,3D打印,激光切割 过氧化氢电池 章鱼:抬腿 仿生狮子鱼[53 ] 硅橡胶:Dragonskin 20;石墨 模具铸造法,3D打印 碘化锌电池液 鱼:游动 单次跳跃机器人[54 ] 硅橡胶:M4601 软光刻,3D打印 丁烷燃料电池 跳跃 机械鳗鱼[68 ] 硅橡胶:Ecoflex 0030,Dragon Skin 0010 软光刻,3D打印 齿轮泵 游动 SMA四足机器人[69 ] SMA、导热弹性体 − 锂聚合物电池 跑动 介电弹性体驱动鳐鱼[70 ] PDMS:Sylgard 184;水凝胶 模具铸造法 介电弹性体 鳐:游动 仿生蚯蚓[71 ] SMA、聚醚醚酮树脂 − 锂聚合物电池 蚯蚓:蠕动 DE驱动乌贼[72 ] 介电弹性体 − 锂聚合物电池 乌贼:喷射前进
2.2. 制造方法 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
... 研究人员仿照蛇的鳞片,用激光切割出折纸图案的塑料片,再将塑料片呈三棱柱状包裹在软执行器、微型气泵及控制器上,形成自主爬行的机器蛇,并研究这种特殊皮肤的摩擦性能[34 ] (见图9(a) ). 除了仿蛇运动的机器人外,各种四足爬行机器人也被广泛研究. 在有系缆四足软体机器人[13 ] 的基础上,通过集成微型气泵、电池、阀门和自主控制所需的控制器,设计新型四足爬行机器人,利用硅橡胶与生俱来的弹性,机器人可以抵抗各种不利的环境条件,包括下雪、积水、暴露于火焰甚至被重物碾压[23 ] (见图9(b) ). 另一种嵌入SMA的四足机器人,能够在包括上坡、岩石地形的各种地面上爬行,还能够爬上大于其身高一半的台阶. 与其他行走类软体机器人相比,SMA四足机器人中材料、控制装置、电源和致动装置的紧密集成降低了硬件的复杂性、尺寸和重量,外观上看上去十分简洁[69 ] (见图9(c) ). Waynelovich等[33 ] 设计的六足机器人的每条腿均由3个软执行器构成,通过执行器的组合工作可以实现前行、转向动作,这是利用增加执行器数量来提高自由度的方法(见图9(d) ). ...
Fast-moving soft electronic fish
3
2017
... Material,production,energy source and movement posture of integrated intelligent soft robots
Tab.1 名称 材料 制造工艺 能量来源 运动方式 四足爬行机器人[23 ] 硅橡胶:Elastosil M4601,Ecoflex 0030 软光刻 微型气泵 海星:爬行 流体驱动仿生鱼[25 ] 硅橡胶:Mold Star 15 模具铸造法 微型液压泵 鱼:游动 仿生海星[28 ] 硅橡胶:Dragonskin 10;SMA 铸造法,3D打印 锂聚合物电池 海星:水下行走 仿生蛇[32 ] 硅橡胶 模具铸造法 微型气泵 蛇:爬行 六足行走机器人[33 ] 硅橡胶:Ecoflex 30 模具铸造法 微型气泵 行走 仿蛇爬行机器人[34 ] 硅橡胶:Ecoflex 0030 激光切割,模具铸造法 微型气泵 蛇:爬行 仿生青蛙[35 ] 硅橡胶:Ecoflex 0050;PDMS:Sylgard 184 模具铸造法,3D打印 高压CO2 气瓶 青蛙:游动 仿生乌贼[36 ] 硅橡胶:Ecoflex 0030 模具铸造法,3D打印 高压CO2 气瓶 乌贼:喷射前进 机械鳐鱼[43 ] SMA;聚氯乙烯 − 锂聚合物电池 鳐:游动 仿生水蛇[44 ] SMA;聚氨酯 − 锂聚合物电池 蛇:游动 IPMC驱动仿生鱼[45 ] IPMC − 锂聚合物电池 鱼:游动 仿生蝠鲼[47 ] IPMC;PDMS 模具铸造法 锂聚合物电池 蝠鲼:游动 仿生魔鬼鱼[48 ] IPMC;PDMS 模具铸造法,3D打印 锂聚合物电池 魔鬼鱼:游动 滚动机器人[49 ] 硅橡胶:Ecoflex 0030 模具铸造法 过氧化氢电池 滚动 多次跳跃机器人[50 ] 类橡胶 3D打印 丁烷燃料电池 跳跃 Octopus[52 ] 硅橡胶:Ecoflex 30;PDMS:Sylgard 184 模具铸造法,软光刻,3D打印,激光切割 过氧化氢电池 章鱼:抬腿 仿生狮子鱼[53 ] 硅橡胶:Dragonskin 20;石墨 模具铸造法,3D打印 碘化锌电池液 鱼:游动 单次跳跃机器人[54 ] 硅橡胶:M4601 软光刻,3D打印 丁烷燃料电池 跳跃 机械鳗鱼[68 ] 硅橡胶:Ecoflex 0030,Dragon Skin 0010 软光刻,3D打印 齿轮泵 游动 SMA四足机器人[69 ] SMA、导热弹性体 − 锂聚合物电池 跑动 介电弹性体驱动鳐鱼[70 ] PDMS:Sylgard 184;水凝胶 模具铸造法 介电弹性体 鳐:游动 仿生蚯蚓[71 ] SMA、聚醚醚酮树脂 − 锂聚合物电池 蚯蚓:蠕动 DE驱动乌贼[72 ] 介电弹性体 − 锂聚合物电池 乌贼:喷射前进
2.2. 制造方法 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
... 在水中生活的动物,大多数都是以游泳的运动方式,通过鳍或身体附肢的摆动产生动力,克服水的阻力来运动. 鱼类中表现出的特殊行为是逃生反应,需要鱼类将身体快速弯曲到大角度,以便加速远离不利的外部刺激[87 -88 ] . 以液体介质驱动鱼尾摆动的远程人工操作软体机械鱼,身体几乎完全由硅橡胶组成,能够实现模仿鱼类向前游进和逃生反应运动[26 , 77 ] (见图10(a) ). 另一款仿生狮子鱼除了外形、运动方式和狮子鱼极为相像外,最大的亮点是自身能量循环系统. 仿生血管系统以氧化还原液流电池为能量来源,将液压传递、致动和能量存储的功能整合到单个集成设计中,从而成几何倍数地增加了机器人的能量密度,可以实现长达36 h的连续运转[53 ] (见图10(b) ). 除了利用尾鳍摆动产生动力的机器人外,还有模仿水蛇摆动身体前进或者模仿鳐鱼利用胸鳍摆动产生动力的机器人. 将SMA嵌入高分子聚合物(聚氨酯)中作为仿生水蛇的身体,通电时SMA弯曲,弹性能量被储存在弹性基板中;停止通电,弹性能量被释放出来驱动返回运动,就像蛇一样弯蜒运动[44 ] (见图10(c) ). 按照同样的驱动原理,研究人员模仿鳐鱼的游动方式制作了软体机器人,机器人主体分为背盖、中板、腹盖三部分,2个胸鳍由嵌入SMA的塑料板组成,能够较好地实现前进、转弯动作[43 ] (见图10(d) ). 如图10(e) 所示的仿生鳐鱼主要由介电弹性体和水凝胶组成,除了优秀的运动能力外还有着良好透明性、持久性和温度耐受性[70 ] . ...
... (2)运动速度缓慢. 抛开跳跃运动的软体机器人,陆地生物仿生的软体机器人前进速度最快约为0.78身长/s[20 ] ,水生生物仿生的软体机器人运动速度最快约为0.65身长/s[70 ] ,相比刚性机器人mini Cheetah能达到的10身长/s[96 ] ,还有较大差距. 想要提高软体机器人的移动速度,首先要依赖新型的高效动力源,以“气动电池”为例,过氧化氢分解的质量能量密度约为锂电池的5倍,而甲烷燃烧的质量能量密度约为锂电池的22倍,使用能量密度高的能量源可以在占用小体积的同时获得更高能量. 其次,流体驱动执行器要避免无做功式膨胀,可以使用纤维增强、织物增强或其他有效方式提高变形量. ...
Meshworm: a peristaltic soft robot with antagonistic nickel titanium coil actuators
1
2013
... Material,production,energy source and movement posture of integrated intelligent soft robots
Tab.1 名称 材料 制造工艺 能量来源 运动方式 四足爬行机器人[23 ] 硅橡胶:Elastosil M4601,Ecoflex 0030 软光刻 微型气泵 海星:爬行 流体驱动仿生鱼[25 ] 硅橡胶:Mold Star 15 模具铸造法 微型液压泵 鱼:游动 仿生海星[28 ] 硅橡胶:Dragonskin 10;SMA 铸造法,3D打印 锂聚合物电池 海星:水下行走 仿生蛇[32 ] 硅橡胶 模具铸造法 微型气泵 蛇:爬行 六足行走机器人[33 ] 硅橡胶:Ecoflex 30 模具铸造法 微型气泵 行走 仿蛇爬行机器人[34 ] 硅橡胶:Ecoflex 0030 激光切割,模具铸造法 微型气泵 蛇:爬行 仿生青蛙[35 ] 硅橡胶:Ecoflex 0050;PDMS:Sylgard 184 模具铸造法,3D打印 高压CO2 气瓶 青蛙:游动 仿生乌贼[36 ] 硅橡胶:Ecoflex 0030 模具铸造法,3D打印 高压CO2 气瓶 乌贼:喷射前进 机械鳐鱼[43 ] SMA;聚氯乙烯 − 锂聚合物电池 鳐:游动 仿生水蛇[44 ] SMA;聚氨酯 − 锂聚合物电池 蛇:游动 IPMC驱动仿生鱼[45 ] IPMC − 锂聚合物电池 鱼:游动 仿生蝠鲼[47 ] IPMC;PDMS 模具铸造法 锂聚合物电池 蝠鲼:游动 仿生魔鬼鱼[48 ] IPMC;PDMS 模具铸造法,3D打印 锂聚合物电池 魔鬼鱼:游动 滚动机器人[49 ] 硅橡胶:Ecoflex 0030 模具铸造法 过氧化氢电池 滚动 多次跳跃机器人[50 ] 类橡胶 3D打印 丁烷燃料电池 跳跃 Octopus[52 ] 硅橡胶:Ecoflex 30;PDMS:Sylgard 184 模具铸造法,软光刻,3D打印,激光切割 过氧化氢电池 章鱼:抬腿 仿生狮子鱼[53 ] 硅橡胶:Dragonskin 20;石墨 模具铸造法,3D打印 碘化锌电池液 鱼:游动 单次跳跃机器人[54 ] 硅橡胶:M4601 软光刻,3D打印 丁烷燃料电池 跳跃 机械鳗鱼[68 ] 硅橡胶:Ecoflex 0030,Dragon Skin 0010 软光刻,3D打印 齿轮泵 游动 SMA四足机器人[69 ] SMA、导热弹性体 − 锂聚合物电池 跑动 介电弹性体驱动鳐鱼[70 ] PDMS:Sylgard 184;水凝胶 模具铸造法 介电弹性体 鳐:游动 仿生蚯蚓[71 ] SMA、聚醚醚酮树脂 − 锂聚合物电池 蚯蚓:蠕动 DE驱动乌贼[72 ] 介电弹性体 − 锂聚合物电池 乌贼:喷射前进
2.2. 制造方法 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
A soft artificial muscle driven robot with reinforcement learning
2
2018
... Material,production,energy source and movement posture of integrated intelligent soft robots
Tab.1 名称 材料 制造工艺 能量来源 运动方式 四足爬行机器人[23 ] 硅橡胶:Elastosil M4601,Ecoflex 0030 软光刻 微型气泵 海星:爬行 流体驱动仿生鱼[25 ] 硅橡胶:Mold Star 15 模具铸造法 微型液压泵 鱼:游动 仿生海星[28 ] 硅橡胶:Dragonskin 10;SMA 铸造法,3D打印 锂聚合物电池 海星:水下行走 仿生蛇[32 ] 硅橡胶 模具铸造法 微型气泵 蛇:爬行 六足行走机器人[33 ] 硅橡胶:Ecoflex 30 模具铸造法 微型气泵 行走 仿蛇爬行机器人[34 ] 硅橡胶:Ecoflex 0030 激光切割,模具铸造法 微型气泵 蛇:爬行 仿生青蛙[35 ] 硅橡胶:Ecoflex 0050;PDMS:Sylgard 184 模具铸造法,3D打印 高压CO2 气瓶 青蛙:游动 仿生乌贼[36 ] 硅橡胶:Ecoflex 0030 模具铸造法,3D打印 高压CO2 气瓶 乌贼:喷射前进 机械鳐鱼[43 ] SMA;聚氯乙烯 − 锂聚合物电池 鳐:游动 仿生水蛇[44 ] SMA;聚氨酯 − 锂聚合物电池 蛇:游动 IPMC驱动仿生鱼[45 ] IPMC − 锂聚合物电池 鱼:游动 仿生蝠鲼[47 ] IPMC;PDMS 模具铸造法 锂聚合物电池 蝠鲼:游动 仿生魔鬼鱼[48 ] IPMC;PDMS 模具铸造法,3D打印 锂聚合物电池 魔鬼鱼:游动 滚动机器人[49 ] 硅橡胶:Ecoflex 0030 模具铸造法 过氧化氢电池 滚动 多次跳跃机器人[50 ] 类橡胶 3D打印 丁烷燃料电池 跳跃 Octopus[52 ] 硅橡胶:Ecoflex 30;PDMS:Sylgard 184 模具铸造法,软光刻,3D打印,激光切割 过氧化氢电池 章鱼:抬腿 仿生狮子鱼[53 ] 硅橡胶:Dragonskin 20;石墨 模具铸造法,3D打印 碘化锌电池液 鱼:游动 单次跳跃机器人[54 ] 硅橡胶:M4601 软光刻,3D打印 丁烷燃料电池 跳跃 机械鳗鱼[68 ] 硅橡胶:Ecoflex 0030,Dragon Skin 0010 软光刻,3D打印 齿轮泵 游动 SMA四足机器人[69 ] SMA、导热弹性体 − 锂聚合物电池 跑动 介电弹性体驱动鳐鱼[70 ] PDMS:Sylgard 184;水凝胶 模具铸造法 介电弹性体 鳐:游动 仿生蚯蚓[71 ] SMA、聚醚醚酮树脂 − 锂聚合物电池 蚯蚓:蠕动 DE驱动乌贼[72 ] 介电弹性体 − 锂聚合物电池 乌贼:喷射前进
2.2. 制造方法 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
... 在外部传统传感器的使用上,软体机器人和刚性机器人相同,例如流体驱动仿生鱼安装了微型摄像头、深度传感器和惯性测量单元[25 ] ,如图11(a) 所示;六足行走机器人在双目摄像头的基础上使用英特尔的四核处理器来提供足够的计算资源来实现人工智能功能,例如导航、物体检测和识别、面部识别甚至语言交互[33 ] . 如图11(b) 所示,Patterson等[28 ] 通过在仿生海星上添加颜色标记,然后用外部环境中的摄像机提供视觉反馈,仿生海星通过计算能够逐步运动到指定位置. 如图11(c) 所示,Yang等[72 ] 将利用摄像头收集的信息通过机器学习优化介电弹性体驱动乌贼的运动控制策略,强化学习后机器人的运动速度提升了91%. 可以说机器学习的调整效率远高于人手动调整,这种基于视觉的捕捉系统给后续集成化软体机器人提供了较好的优化思路. 这意味着软体机器人向着更高的智能化迈进,但未来除了传统的传感器外,也需要更多的新型柔性传感器提供信息. ...
软体机器人研究进展
1
2020
... 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
软体机器人研究进展
1
2020
... 软体机器人的制造方法主要包括铸造技术、软光刻技术、3D打印技术、形状沉积技术等[73 ] . 每种制作工艺有自身的优势和缺陷,由于预想功能的复杂性,集成化软体机器人使用的制造方式通常不是单一的,需要多种制作工艺相互配合. 其中,激光切割技术、3D模具打印常用作制造流程中的辅助技术. ...
Bio-inspired pneumatic shape-morphing elastomers
1
2019
... 铸造技术是上述4类主要制造工艺中最简单常见的. 利用计算机辅助软件设计模具,然后3D打印或切削加工来制备模具[74 ] ;在模具中倒入液态弹性材料,在适当温度下烘烤/光照[49 , 75 ] . 为了封闭流体通道,须将开放通道件胶合到扁平膜上,黏合的部分涂抹相同液态弹性材料,再次烘烤或光照. 为了让弹性执行器在加压时达到理想的弯曲效果,常在固化时在执行器一侧加入不可延展的材料. 集成化设计的流体驱动仿生鱼[25 ] 、仿生蛇[32 ] 、六足行走机器人[33 ] 、滚动机器人[49 ] 、仿生青蛙[35 ] 等在制作软执行器时都使用了铸造法. 如图6 所示为流体驱动仿生鱼的鱼尾部分采用铸造法的制作过程,首先用模具铸造出鱼尾的三部分,然后组装胶合起来. 铸造法的应用虽然普遍,但在加工前有很多设计和模具制造的工作,且弹性材料也有凝固过程,所以总体花费时间较长. ...
Design of a soft composite finger with adjustable joint stiffness
1
2019
... 铸造技术是上述4类主要制造工艺中最简单常见的. 利用计算机辅助软件设计模具,然后3D打印或切削加工来制备模具[74 ] ;在模具中倒入液态弹性材料,在适当温度下烘烤/光照[49 , 75 ] . 为了封闭流体通道,须将开放通道件胶合到扁平膜上,黏合的部分涂抹相同液态弹性材料,再次烘烤或光照. 为了让弹性执行器在加压时达到理想的弯曲效果,常在固化时在执行器一侧加入不可延展的材料. 集成化设计的流体驱动仿生鱼[25 ] 、仿生蛇[32 ] 、六足行走机器人[33 ] 、滚动机器人[49 ] 、仿生青蛙[35 ] 等在制作软执行器时都使用了铸造法. 如图6 所示为流体驱动仿生鱼的鱼尾部分采用铸造法的制作过程,首先用模具铸造出鱼尾的三部分,然后组装胶合起来. 铸造法的应用虽然普遍,但在加工前有很多设计和模具制造的工作,且弹性材料也有凝固过程,所以总体花费时间较长. ...
Increasing the dimensionality of soft microstructures through injection-induced self-folding
4
2018
... 软光刻技术是利用光刻胶感光后发生光化学反应而产生耐蚀性的特点,将掩模版上的图案刻制到被加工表面上的技术. 在制作软体机器人的过程中,通常将PDMS材料倒在带有图案的硅晶片上,借助电子元件让光照射模具的表面,使覆盖在图案上的一层薄薄的高分子膜曝光,然后溶解没有图案的区域[76 ] . 软光刻技术被用来直接制备带有气体栅格通道的机器人主体[23 ] 和跳跃机器人的执行器[54 ] ,在仿生水蛇的多节软执行器的制作中也使用了软光刻技术[68 ] . 软光刻技术应用在软体机器人的最早阶段,Marchese称这种制作工艺制作出的软体结构为2.5D的,因为制作的软体结构较大程度上被限制在平面上[77 ] . 经过逐渐发展,通过将软光刻制作的各层精确对齐黏合,能够得到具有嵌入式微流体通路和几乎任意复杂轮廓的柔软层,也形成了更加立体化的软体机器人. 如图7 所示为软体仿生蜘蛛[76 ] 的软光刻制作流程,将PDMS倒在有特殊图案的硅晶片上;在经过曝光、脱气和旋涂处理后,将PDMS层从黏合剂基底剥离;根据特定设计图案,使用精密激光微加工系统切割弹性体;将以上步骤重复12次,制备12个不同的PDMS层;将这些PDMS层黏合,组成软体仿生蜘蛛. ...
... [76 ]的软光刻制作流程,将PDMS倒在有特殊图案的硅晶片上;在经过曝光、脱气和旋涂处理后,将PDMS层从黏合剂基底剥离;根据特定设计图案,使用精密激光微加工系统切割弹性体;将以上步骤重复12次,制备12个不同的PDMS层;将这些PDMS层黏合,组成软体仿生蜘蛛. ...
... 多层软光刻制造过程[76 ] ...
... Manufacturing process of multilayer soft lithography[76 ] ...
A recipe for soft fluidic elastomer robots
2
2015
... 软光刻技术是利用光刻胶感光后发生光化学反应而产生耐蚀性的特点,将掩模版上的图案刻制到被加工表面上的技术. 在制作软体机器人的过程中,通常将PDMS材料倒在带有图案的硅晶片上,借助电子元件让光照射模具的表面,使覆盖在图案上的一层薄薄的高分子膜曝光,然后溶解没有图案的区域[76 ] . 软光刻技术被用来直接制备带有气体栅格通道的机器人主体[23 ] 和跳跃机器人的执行器[54 ] ,在仿生水蛇的多节软执行器的制作中也使用了软光刻技术[68 ] . 软光刻技术应用在软体机器人的最早阶段,Marchese称这种制作工艺制作出的软体结构为2.5D的,因为制作的软体结构较大程度上被限制在平面上[77 ] . 经过逐渐发展,通过将软光刻制作的各层精确对齐黏合,能够得到具有嵌入式微流体通路和几乎任意复杂轮廓的柔软层,也形成了更加立体化的软体机器人. 如图7 所示为软体仿生蜘蛛[76 ] 的软光刻制作流程,将PDMS倒在有特殊图案的硅晶片上;在经过曝光、脱气和旋涂处理后,将PDMS层从黏合剂基底剥离;根据特定设计图案,使用精密激光微加工系统切割弹性体;将以上步骤重复12次,制备12个不同的PDMS层;将这些PDMS层黏合,组成软体仿生蜘蛛. ...
... 在水中生活的动物,大多数都是以游泳的运动方式,通过鳍或身体附肢的摆动产生动力,克服水的阻力来运动. 鱼类中表现出的特殊行为是逃生反应,需要鱼类将身体快速弯曲到大角度,以便加速远离不利的外部刺激[87 -88 ] . 以液体介质驱动鱼尾摆动的远程人工操作软体机械鱼,身体几乎完全由硅橡胶组成,能够实现模仿鱼类向前游进和逃生反应运动[26 , 77 ] (见图10(a) ). 另一款仿生狮子鱼除了外形、运动方式和狮子鱼极为相像外,最大的亮点是自身能量循环系统. 仿生血管系统以氧化还原液流电池为能量来源,将液压传递、致动和能量存储的功能整合到单个集成设计中,从而成几何倍数地增加了机器人的能量密度,可以实现长达36 h的连续运转[53 ] (见图10(b) ). 除了利用尾鳍摆动产生动力的机器人外,还有模仿水蛇摆动身体前进或者模仿鳐鱼利用胸鳍摆动产生动力的机器人. 将SMA嵌入高分子聚合物(聚氨酯)中作为仿生水蛇的身体,通电时SMA弯曲,弹性能量被储存在弹性基板中;停止通电,弹性能量被释放出来驱动返回运动,就像蛇一样弯蜒运动[44 ] (见图10(c) ). 按照同样的驱动原理,研究人员模仿鳐鱼的游动方式制作了软体机器人,机器人主体分为背盖、中板、腹盖三部分,2个胸鳍由嵌入SMA的塑料板组成,能够较好地实现前进、转弯动作[43 ] (见图10(d) ). 如图10(e) 所示的仿生鳐鱼主要由介电弹性体和水凝胶组成,除了优秀的运动能力外还有着良好透明性、持久性和温度耐受性[70 ] . ...
3D printing of soft robotic systems
1
2018
... 3D打印柔软材料的制作速度较快,省去了设计模具及其他多个步骤,直接从下而上自组装出执行器原型,并可以快速地在原型设计中进行修改,无须修改特殊模具[78 ] . 不同的3D打印技术(如直写打印、喷墨打印及光固化打印)都能够使用软材料,并且很多研究人员都使用3D打印直接制作了弯曲执行器[14 , 79 -80 ] ,但使用的材料弹性模量数量级都高于107 Pa,并不能达到软组织、肌肉的柔软程度. 如图8 所示,Wehner等[52 ] 使用包括3D打印的多种制作方式来制作集成化软体机器人Octopus. 将预制的微流体控制器放入模具中,倒入硅橡胶,待硅橡胶固化后,通过嵌入式3D打印的方式将水性油墨打印到硅橡胶基质中;在基质材料交联后,当水蒸发并扩散穿过基质时,水性油墨在升高的温度下“自动排空”,留下了与软控制器连接的开放通道网络. 目前还没有使用3D打印直接制作集成化智能软体机器人躯体的实例,但是随着3D打印突破多材料多喷头技术瓶颈[81 ] ,如果能够规划好动力系统、执行系统及其他系统的材料及位置,直接打印出集成化智能软体机器人将有望实现,这会给软体机器人的商业化提供极大的便利. ...
Fabrication and dynamic modeling of bidirectional bending soft actuator integrated with optical waveguide curvature sensor
1
2019
... 3D打印柔软材料的制作速度较快,省去了设计模具及其他多个步骤,直接从下而上自组装出执行器原型,并可以快速地在原型设计中进行修改,无须修改特殊模具[78 ] . 不同的3D打印技术(如直写打印、喷墨打印及光固化打印)都能够使用软材料,并且很多研究人员都使用3D打印直接制作了弯曲执行器[14 , 79 -80 ] ,但使用的材料弹性模量数量级都高于107 Pa,并不能达到软组织、肌肉的柔软程度. 如图8 所示,Wehner等[52 ] 使用包括3D打印的多种制作方式来制作集成化软体机器人Octopus. 将预制的微流体控制器放入模具中,倒入硅橡胶,待硅橡胶固化后,通过嵌入式3D打印的方式将水性油墨打印到硅橡胶基质中;在基质材料交联后,当水蒸发并扩散穿过基质时,水性油墨在升高的温度下“自动排空”,留下了与软控制器连接的开放通道网络. 目前还没有使用3D打印直接制作集成化智能软体机器人躯体的实例,但是随着3D打印突破多材料多喷头技术瓶颈[81 ] ,如果能够规划好动力系统、执行系统及其他系统的材料及位置,直接打印出集成化智能软体机器人将有望实现,这会给软体机器人的商业化提供极大的便利. ...
High-force soft printable pneumatics for soft robotic applications
1
2016
... 3D打印柔软材料的制作速度较快,省去了设计模具及其他多个步骤,直接从下而上自组装出执行器原型,并可以快速地在原型设计中进行修改,无须修改特殊模具[78 ] . 不同的3D打印技术(如直写打印、喷墨打印及光固化打印)都能够使用软材料,并且很多研究人员都使用3D打印直接制作了弯曲执行器[14 , 79 -80 ] ,但使用的材料弹性模量数量级都高于107 Pa,并不能达到软组织、肌肉的柔软程度. 如图8 所示,Wehner等[52 ] 使用包括3D打印的多种制作方式来制作集成化软体机器人Octopus. 将预制的微流体控制器放入模具中,倒入硅橡胶,待硅橡胶固化后,通过嵌入式3D打印的方式将水性油墨打印到硅橡胶基质中;在基质材料交联后,当水蒸发并扩散穿过基质时,水性油墨在升高的温度下“自动排空”,留下了与软控制器连接的开放通道网络. 目前还没有使用3D打印直接制作集成化智能软体机器人躯体的实例,但是随着3D打印突破多材料多喷头技术瓶颈[81 ] ,如果能够规划好动力系统、执行系统及其他系统的材料及位置,直接打印出集成化智能软体机器人将有望实现,这会给软体机器人的商业化提供极大的便利. ...
2
... 3D打印柔软材料的制作速度较快,省去了设计模具及其他多个步骤,直接从下而上自组装出执行器原型,并可以快速地在原型设计中进行修改,无须修改特殊模具[78 ] . 不同的3D打印技术(如直写打印、喷墨打印及光固化打印)都能够使用软材料,并且很多研究人员都使用3D打印直接制作了弯曲执行器[14 , 79 -80 ] ,但使用的材料弹性模量数量级都高于107 Pa,并不能达到软组织、肌肉的柔软程度. 如图8 所示,Wehner等[52 ] 使用包括3D打印的多种制作方式来制作集成化软体机器人Octopus. 将预制的微流体控制器放入模具中,倒入硅橡胶,待硅橡胶固化后,通过嵌入式3D打印的方式将水性油墨打印到硅橡胶基质中;在基质材料交联后,当水蒸发并扩散穿过基质时,水性油墨在升高的温度下“自动排空”,留下了与软控制器连接的开放通道网络. 目前还没有使用3D打印直接制作集成化智能软体机器人躯体的实例,但是随着3D打印突破多材料多喷头技术瓶颈[81 ] ,如果能够规划好动力系统、执行系统及其他系统的材料及位置,直接打印出集成化智能软体机器人将有望实现,这会给软体机器人的商业化提供极大的便利. ...
... 各种有缆软体机器人已经应用在野外探索[14 , 98 ] 、康复医疗[99 -101 ] 、临床手术[81 -82 , 102 -103 ] 等领域,而集成化软体机器人因为自身具有的便捷性,出色的可控和可预测自主运动能力,最有希望应用在勘探未知环境上. 如军事上须处于隐蔽状态,希望机器人能通过门缝、管道、墙缝等窄小通道;矿难、震灾现场希望机器人能独立深入危险区域探查生命迹象等. 如何结合人工智能,让集成化软体机器人具有更高的智能性同样是难点. 人工智能虽然在理论和技术日益成熟,应用领域也不断扩大,但是让软体机器人胜任一些需要人类智能才能完成的复杂工作还需要漫长的研究过程. 希望集成化智能软体机器人的研究可以从驱动方式、材料、制作工艺、运动方式、传感与控制的角度形成一套完整的体系,让集成化智能软体机器人发挥应有的作用. ...
Worm-like soft robot for complicated tubular environments
2
2019
... 在4种主要的软体机器人制造工艺中,集成化智能软体机器人还没有使用形状沉积制造工艺的先例,但是这种将材料添加过程和材料去除过程相结合的技术在原理上对于实现机器人本身的集成化设计是十分便利的,比如预埋传感器在机器人内部,比传感器附着在外部更容易收集信息,也更加稳固[82 -83 ] ;预埋阀门、信号线、控制器等控制元件,不用担心控制部分与执行部分的连接问题,集成化、智能化都更容易实现[84 -85 ] . ...
... 各种有缆软体机器人已经应用在野外探索[14 , 98 ] 、康复医疗[99 -101 ] 、临床手术[81 -82 , 102 -103 ] 等领域,而集成化软体机器人因为自身具有的便捷性,出色的可控和可预测自主运动能力,最有希望应用在勘探未知环境上. 如军事上须处于隐蔽状态,希望机器人能通过门缝、管道、墙缝等窄小通道;矿难、震灾现场希望机器人能独立深入危险区域探查生命迹象等. 如何结合人工智能,让集成化软体机器人具有更高的智能性同样是难点. 人工智能虽然在理论和技术日益成熟,应用领域也不断扩大,但是让软体机器人胜任一些需要人类智能才能完成的复杂工作还需要漫长的研究过程. 希望集成化智能软体机器人的研究可以从驱动方式、材料、制作工艺、运动方式、传感与控制的角度形成一套完整的体系,让集成化智能软体机器人发挥应有的作用. ...
A robust compliant grasper via shape deposition manufacturing
1
2006
... 在4种主要的软体机器人制造工艺中,集成化智能软体机器人还没有使用形状沉积制造工艺的先例,但是这种将材料添加过程和材料去除过程相结合的技术在原理上对于实现机器人本身的集成化设计是十分便利的,比如预埋传感器在机器人内部,比传感器附着在外部更容易收集信息,也更加稳固[82 -83 ] ;预埋阀门、信号线、控制器等控制元件,不用担心控制部分与执行部分的连接问题,集成化、智能化都更容易实现[84 -85 ] . ...
Fast and robust: hexapedal robots via shape deposition manufacturing
1
2002
... 在4种主要的软体机器人制造工艺中,集成化智能软体机器人还没有使用形状沉积制造工艺的先例,但是这种将材料添加过程和材料去除过程相结合的技术在原理上对于实现机器人本身的集成化设计是十分便利的,比如预埋传感器在机器人内部,比传感器附着在外部更容易收集信息,也更加稳固[82 -83 ] ;预埋阀门、信号线、控制器等控制元件,不用担心控制部分与执行部分的连接问题,集成化、智能化都更容易实现[84 -85 ] . ...
1
... 在4种主要的软体机器人制造工艺中,集成化智能软体机器人还没有使用形状沉积制造工艺的先例,但是这种将材料添加过程和材料去除过程相结合的技术在原理上对于实现机器人本身的集成化设计是十分便利的,比如预埋传感器在机器人内部,比传感器附着在外部更容易收集信息,也更加稳固[82 -83 ] ;预埋阀门、信号线、控制器等控制元件,不用担心控制部分与执行部分的连接问题,集成化、智能化都更容易实现[84 -85 ] . ...
Soft robotics: a perspective: current trends and prospects for the future
1
2014
... 软体动物没有骨骼之类的坚硬结构,身体具有较高的自由度,这是在进化的过程中它们的身体为了应对外界激励做出的改变. 这些柔性组织既可以缩小体积,使他们进入狭小的空间,也在受到外界冲击时提供缓冲,在更大面积上平摊应力[24 ] . 目前的软体机器人多是模仿自然界中生物,利用柔软材料实现超越骨骼和关节的结构,实现肌肉、肌腱和皮肤相对应的功能[86 ] . 这些从自然界中汲取灵感的软体机器人,要比刚性机器人具有更好的灵活性、适应性和安全性. 按照运动姿态,集成化智能软体机器人的运动方式一般分为陆地生物仿生运动和水下生物仿生运动2类. ...
Review of biomimetic underwater robots using smart actuators
1
2012
... 在水中生活的动物,大多数都是以游泳的运动方式,通过鳍或身体附肢的摆动产生动力,克服水的阻力来运动. 鱼类中表现出的特殊行为是逃生反应,需要鱼类将身体快速弯曲到大角度,以便加速远离不利的外部刺激[87 -88 ] . 以液体介质驱动鱼尾摆动的远程人工操作软体机械鱼,身体几乎完全由硅橡胶组成,能够实现模仿鱼类向前游进和逃生反应运动[26 , 77 ] (见图10(a) ). 另一款仿生狮子鱼除了外形、运动方式和狮子鱼极为相像外,最大的亮点是自身能量循环系统. 仿生血管系统以氧化还原液流电池为能量来源,将液压传递、致动和能量存储的功能整合到单个集成设计中,从而成几何倍数地增加了机器人的能量密度,可以实现长达36 h的连续运转[53 ] (见图10(b) ). 除了利用尾鳍摆动产生动力的机器人外,还有模仿水蛇摆动身体前进或者模仿鳐鱼利用胸鳍摆动产生动力的机器人. 将SMA嵌入高分子聚合物(聚氨酯)中作为仿生水蛇的身体,通电时SMA弯曲,弹性能量被储存在弹性基板中;停止通电,弹性能量被释放出来驱动返回运动,就像蛇一样弯蜒运动[44 ] (见图10(c) ). 按照同样的驱动原理,研究人员模仿鳐鱼的游动方式制作了软体机器人,机器人主体分为背盖、中板、腹盖三部分,2个胸鳍由嵌入SMA的塑料板组成,能够较好地实现前进、转弯动作[43 ] (见图10(d) ). 如图10(e) 所示的仿生鳐鱼主要由介电弹性体和水凝胶组成,除了优秀的运动能力外还有着良好透明性、持久性和温度耐受性[70 ] . ...
Motion control and motion coordination of bionic robotic fish: a review
1
2018
... 在水中生活的动物,大多数都是以游泳的运动方式,通过鳍或身体附肢的摆动产生动力,克服水的阻力来运动. 鱼类中表现出的特殊行为是逃生反应,需要鱼类将身体快速弯曲到大角度,以便加速远离不利的外部刺激[87 -88 ] . 以液体介质驱动鱼尾摆动的远程人工操作软体机械鱼,身体几乎完全由硅橡胶组成,能够实现模仿鱼类向前游进和逃生反应运动[26 , 77 ] (见图10(a) ). 另一款仿生狮子鱼除了外形、运动方式和狮子鱼极为相像外,最大的亮点是自身能量循环系统. 仿生血管系统以氧化还原液流电池为能量来源,将液压传递、致动和能量存储的功能整合到单个集成设计中,从而成几何倍数地增加了机器人的能量密度,可以实现长达36 h的连续运转[53 ] (见图10(b) ). 除了利用尾鳍摆动产生动力的机器人外,还有模仿水蛇摆动身体前进或者模仿鳐鱼利用胸鳍摆动产生动力的机器人. 将SMA嵌入高分子聚合物(聚氨酯)中作为仿生水蛇的身体,通电时SMA弯曲,弹性能量被储存在弹性基板中;停止通电,弹性能量被释放出来驱动返回运动,就像蛇一样弯蜒运动[44 ] (见图10(c) ). 按照同样的驱动原理,研究人员模仿鳐鱼的游动方式制作了软体机器人,机器人主体分为背盖、中板、腹盖三部分,2个胸鳍由嵌入SMA的塑料板组成,能够较好地实现前进、转弯动作[43 ] (见图10(d) ). 如图10(e) 所示的仿生鳐鱼主要由介电弹性体和水凝胶组成,除了优秀的运动能力外还有着良好透明性、持久性和温度耐受性[70 ] . ...
Design, fabrication and control of soft robots
1
2015
... 软体材料的柔软性影响了许多常规刚性传感器的使用,例如编码器、半导体应变器和惯性测量单元等[89 ] . 传统的传感器无法捕捉软系统的高维变形,而可伸展的柔性传感器能更好地覆盖在软执行器表面,通过检测弯曲和振动来感知触觉信息[90 ] . ...
Electronic skins for soft, compact, reversible assembly of wirelessly activated fully soft robots
1
2018
... 软体材料的柔软性影响了许多常规刚性传感器的使用,例如编码器、半导体应变器和惯性测量单元等[89 ] . 传统的传感器无法捕捉软系统的高维变形,而可伸展的柔性传感器能更好地覆盖在软执行器表面,通过检测弯曲和振动来感知触觉信息[90 ] . ...
Data-driven super-resolution on a tactile dome
1
2018
... 随着触觉传感器排列密度的增加,能够记录下关于触觉的大量数据集. 这些信息经过机器学习处理后能够更加精准地预测软执行器在三维空间中的变形以及复杂的接触表面纹理信息. 通过将现成的压力传感器嵌入到柔软材料中,获取柔软材料的曲面被按压时的信息,并使用纯数据驱动的方法来学习从这些传感器读数到缩进位置的映射来预测凹痕的位置[91 ] . 一款使用卷积神经网络训练过的嵌入式软传感器可以准确识别5种按压手势[92 ] . 包含548个力传感器的手套同样利用卷积神经网络学习后,能够智能地从大规模的触觉数据集中识别被抓握、触碰的对象[93 ] . ...
A deformable interface for human touch recognition using stretchable carbon nanotube dielectric elastomer sensors and deep neural networks
1
2019
... 随着触觉传感器排列密度的增加,能够记录下关于触觉的大量数据集. 这些信息经过机器学习处理后能够更加精准地预测软执行器在三维空间中的变形以及复杂的接触表面纹理信息. 通过将现成的压力传感器嵌入到柔软材料中,获取柔软材料的曲面被按压时的信息,并使用纯数据驱动的方法来学习从这些传感器读数到缩进位置的映射来预测凹痕的位置[91 ] . 一款使用卷积神经网络训练过的嵌入式软传感器可以准确识别5种按压手势[92 ] . 包含548个力传感器的手套同样利用卷积神经网络学习后,能够智能地从大规模的触觉数据集中识别被抓握、触碰的对象[93 ] . ...
Learning the signatures of the human grasp using a scalable tactile glove
1
2019
... 随着触觉传感器排列密度的增加,能够记录下关于触觉的大量数据集. 这些信息经过机器学习处理后能够更加精准地预测软执行器在三维空间中的变形以及复杂的接触表面纹理信息. 通过将现成的压力传感器嵌入到柔软材料中,获取柔软材料的曲面被按压时的信息,并使用纯数据驱动的方法来学习从这些传感器读数到缩进位置的映射来预测凹痕的位置[91 ] . 一款使用卷积神经网络训练过的嵌入式软传感器可以准确识别5种按压手势[92 ] . 包含548个力传感器的手套同样利用卷积神经网络学习后,能够智能地从大规模的触觉数据集中识别被抓握、触碰的对象[93 ] . ...
软体机器人驱动、建模与应用研究综述
1
2019
... 软体机器人由于躯体的柔性,其基础的运动学和动力学理论公式很难求解,至今关于软体机器人的运动理论仍然是空白,机器人的姿态、方向、速度等基础指标不可控制,也不可预测[94 ] . 其次,由于机器人的运动学和动力学理论暂时不可求,软体机器人的建模和控制算法也成为了难题. 软体机器人常用的运动学建模模型-分段常曲率模型[95 ] 适用于线性连续软体执行器,对于结构更为复杂的集成化智能软体机器人来说,这种模型是不适用的. Aureli等[45 ] 在研究IPMC驱动器时仍采用研究刚性机器人的综合模型,在设定的坐标轴下确定齐次变换矩阵,通过坐标变换求出执行器末端相对坐标轴的位置. 这种方法虽然考虑了水动力效应,如附加质量和阻尼,以及摇摆、偏航等因素,但须基于刚性材料的前提. 对于集成化智能软体机器人的不同运动方式、不同结构组成,需要独特的建模模型,才能有针对性地实现控制. ...
软体机器人驱动、建模与应用研究综述
1
2019
... 软体机器人由于躯体的柔性,其基础的运动学和动力学理论公式很难求解,至今关于软体机器人的运动理论仍然是空白,机器人的姿态、方向、速度等基础指标不可控制,也不可预测[94 ] . 其次,由于机器人的运动学和动力学理论暂时不可求,软体机器人的建模和控制算法也成为了难题. 软体机器人常用的运动学建模模型-分段常曲率模型[95 ] 适用于线性连续软体执行器,对于结构更为复杂的集成化智能软体机器人来说,这种模型是不适用的. Aureli等[45 ] 在研究IPMC驱动器时仍采用研究刚性机器人的综合模型,在设定的坐标轴下确定齐次变换矩阵,通过坐标变换求出执行器末端相对坐标轴的位置. 这种方法虽然考虑了水动力效应,如附加质量和阻尼,以及摇摆、偏航等因素,但须基于刚性材料的前提. 对于集成化智能软体机器人的不同运动方式、不同结构组成,需要独特的建模模型,才能有针对性地实现控制. ...
Design and kinematic modeling of constant curvature continuum robots: a review
1
2010
... 软体机器人由于躯体的柔性,其基础的运动学和动力学理论公式很难求解,至今关于软体机器人的运动理论仍然是空白,机器人的姿态、方向、速度等基础指标不可控制,也不可预测[94 ] . 其次,由于机器人的运动学和动力学理论暂时不可求,软体机器人的建模和控制算法也成为了难题. 软体机器人常用的运动学建模模型-分段常曲率模型[95 ] 适用于线性连续软体执行器,对于结构更为复杂的集成化智能软体机器人来说,这种模型是不适用的. Aureli等[45 ] 在研究IPMC驱动器时仍采用研究刚性机器人的综合模型,在设定的坐标轴下确定齐次变换矩阵,通过坐标变换求出执行器末端相对坐标轴的位置. 这种方法虽然考虑了水动力效应,如附加质量和阻尼,以及摇摆、偏航等因素,但须基于刚性材料的前提. 对于集成化智能软体机器人的不同运动方式、不同结构组成,需要独特的建模模型,才能有针对性地实现控制. ...
1
... (2)运动速度缓慢. 抛开跳跃运动的软体机器人,陆地生物仿生的软体机器人前进速度最快约为0.78身长/s[20 ] ,水生生物仿生的软体机器人运动速度最快约为0.65身长/s[70 ] ,相比刚性机器人mini Cheetah能达到的10身长/s[96 ] ,还有较大差距. 想要提高软体机器人的移动速度,首先要依赖新型的高效动力源,以“气动电池”为例,过氧化氢分解的质量能量密度约为锂电池的5倍,而甲烷燃烧的质量能量密度约为锂电池的22倍,使用能量密度高的能量源可以在占用小体积的同时获得更高能量. 其次,流体驱动执行器要避免无做功式膨胀,可以使用纤维增强、织物增强或其他有效方式提高变形量. ...
1
... (5)使用寿命难以预计. 依靠流体驱动的气动网格执行器的使用寿命在几百至几千个工作周期,Polygerinos[97 ] 提出的新型气动网格执行器寿命能达到百万次以上,但是制造过程中的微小差别都会使软体执行器的寿命产生较大差异. 软体执行器的寿命在商业化应用中至关重要,寿命越长就意味着更长的生产时间与更高的设备使用效率. 工业应用的软体夹持器通过在高分子基体材料中加入纳米添加剂,能够提升现有柔性材料的拉伸强度和耐磨性. 添加改性材料是提高使用寿命的良好方案,但探索新型材料的脚步绝对不能停止. ...
A soft robot that navigates its environment through growth
1
2017
... 各种有缆软体机器人已经应用在野外探索[14 , 98 ] 、康复医疗[99 -101 ] 、临床手术[81 -82 , 102 -103 ] 等领域,而集成化软体机器人因为自身具有的便捷性,出色的可控和可预测自主运动能力,最有希望应用在勘探未知环境上. 如军事上须处于隐蔽状态,希望机器人能通过门缝、管道、墙缝等窄小通道;矿难、震灾现场希望机器人能独立深入危险区域探查生命迹象等. 如何结合人工智能,让集成化软体机器人具有更高的智能性同样是难点. 人工智能虽然在理论和技术日益成熟,应用领域也不断扩大,但是让软体机器人胜任一些需要人类智能才能完成的复杂工作还需要漫长的研究过程. 希望集成化智能软体机器人的研究可以从驱动方式、材料、制作工艺、运动方式、传感与控制的角度形成一套完整的体系,让集成化智能软体机器人发挥应有的作用. ...
1
... 各种有缆软体机器人已经应用在野外探索[14 , 98 ] 、康复医疗[99 -101 ] 、临床手术[81 -82 , 102 -103 ] 等领域,而集成化软体机器人因为自身具有的便捷性,出色的可控和可预测自主运动能力,最有希望应用在勘探未知环境上. 如军事上须处于隐蔽状态,希望机器人能通过门缝、管道、墙缝等窄小通道;矿难、震灾现场希望机器人能独立深入危险区域探查生命迹象等. 如何结合人工智能,让集成化软体机器人具有更高的智能性同样是难点. 人工智能虽然在理论和技术日益成熟,应用领域也不断扩大,但是让软体机器人胜任一些需要人类智能才能完成的复杂工作还需要漫长的研究过程. 希望集成化智能软体机器人的研究可以从驱动方式、材料、制作工艺、运动方式、传感与控制的角度形成一套完整的体系,让集成化智能软体机器人发挥应有的作用. ...
Soft robotic glove for combined assistance and at-home rehabilitation
0
2015
A helping hand: soft orthosis with integrated optical strain sensors and emg control
1
2016
... 各种有缆软体机器人已经应用在野外探索[14 , 98 ] 、康复医疗[99 -101 ] 、临床手术[81 -82 , 102 -103 ] 等领域,而集成化软体机器人因为自身具有的便捷性,出色的可控和可预测自主运动能力,最有希望应用在勘探未知环境上. 如军事上须处于隐蔽状态,希望机器人能通过门缝、管道、墙缝等窄小通道;矿难、震灾现场希望机器人能独立深入危险区域探查生命迹象等. 如何结合人工智能,让集成化软体机器人具有更高的智能性同样是难点. 人工智能虽然在理论和技术日益成熟,应用领域也不断扩大,但是让软体机器人胜任一些需要人类智能才能完成的复杂工作还需要漫长的研究过程. 希望集成化智能软体机器人的研究可以从驱动方式、材料、制作工艺、运动方式、传感与控制的角度形成一套完整的体系,让集成化智能软体机器人发挥应有的作用. ...
Sensor-based guidance control of a continuum robot for a semi-autonomous colonoscopy
1
2009
... 各种有缆软体机器人已经应用在野外探索[14 , 98 ] 、康复医疗[99 -101 ] 、临床手术[81 -82 , 102 -103 ] 等领域,而集成化软体机器人因为自身具有的便捷性,出色的可控和可预测自主运动能力,最有希望应用在勘探未知环境上. 如军事上须处于隐蔽状态,希望机器人能通过门缝、管道、墙缝等窄小通道;矿难、震灾现场希望机器人能独立深入危险区域探查生命迹象等. 如何结合人工智能,让集成化软体机器人具有更高的智能性同样是难点. 人工智能虽然在理论和技术日益成熟,应用领域也不断扩大,但是让软体机器人胜任一些需要人类智能才能完成的复杂工作还需要漫长的研究过程. 希望集成化智能软体机器人的研究可以从驱动方式、材料、制作工艺、运动方式、传感与控制的角度形成一套完整的体系,让集成化智能软体机器人发挥应有的作用. ...
Soft robotic sleeve supports heart function
1
2017
... 各种有缆软体机器人已经应用在野外探索[14 , 98 ] 、康复医疗[99 -101 ] 、临床手术[81 -82 , 102 -103 ] 等领域,而集成化软体机器人因为自身具有的便捷性,出色的可控和可预测自主运动能力,最有希望应用在勘探未知环境上. 如军事上须处于隐蔽状态,希望机器人能通过门缝、管道、墙缝等窄小通道;矿难、震灾现场希望机器人能独立深入危险区域探查生命迹象等. 如何结合人工智能,让集成化软体机器人具有更高的智能性同样是难点. 人工智能虽然在理论和技术日益成熟,应用领域也不断扩大,但是让软体机器人胜任一些需要人类智能才能完成的复杂工作还需要漫长的研究过程. 希望集成化智能软体机器人的研究可以从驱动方式、材料、制作工艺、运动方式、传感与控制的角度形成一套完整的体系,让集成化智能软体机器人发挥应有的作用. ...



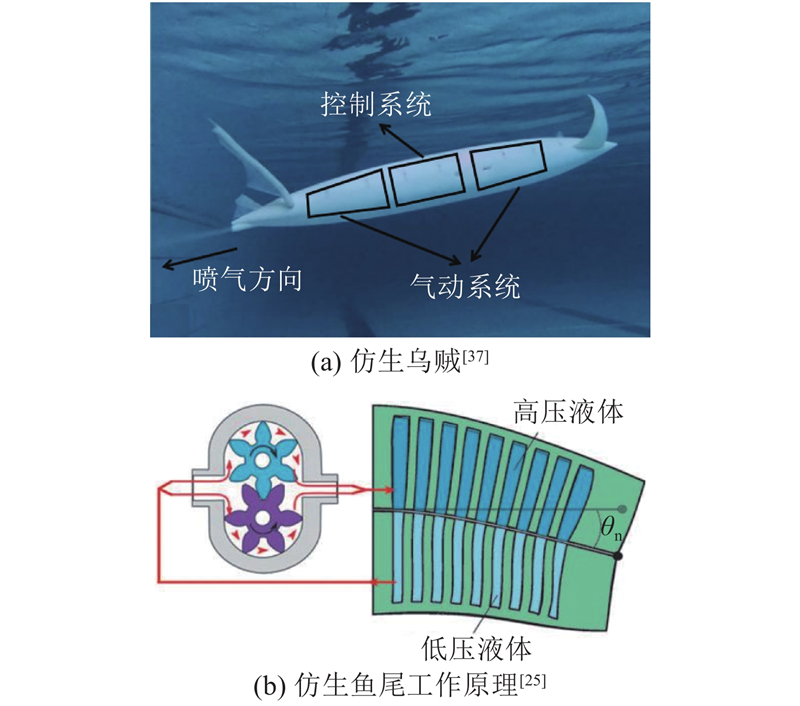

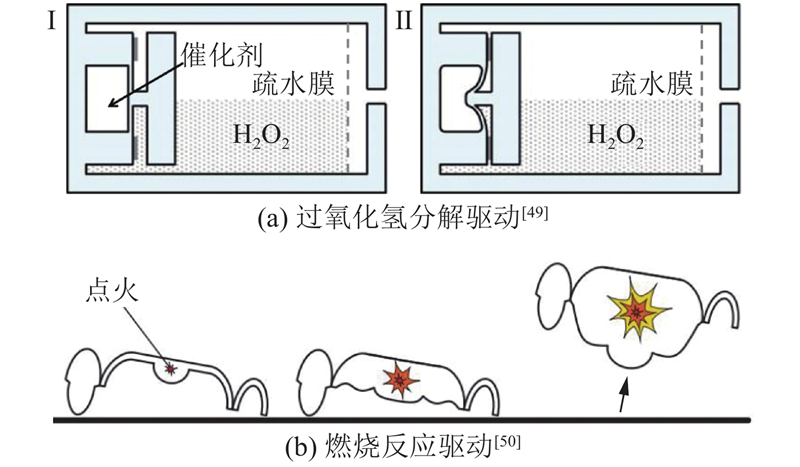
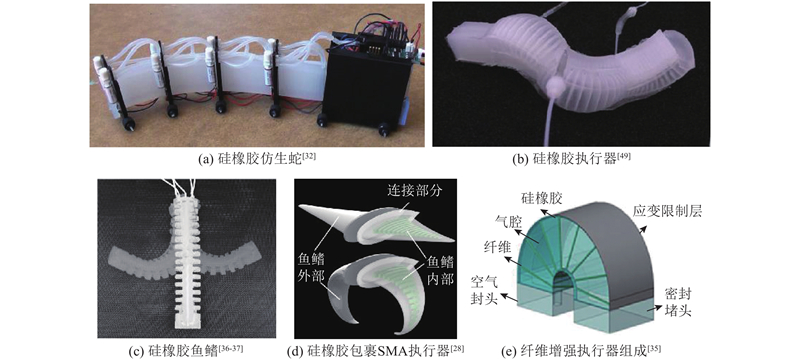
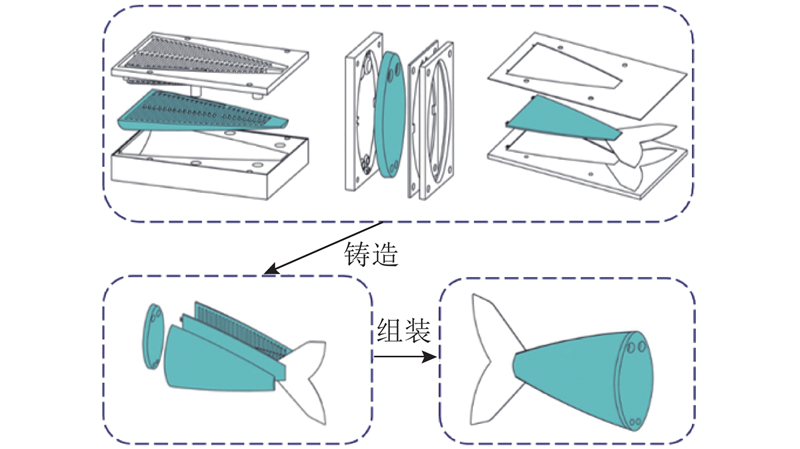
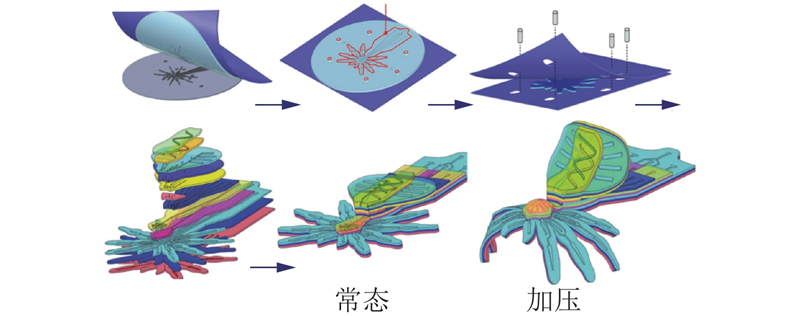


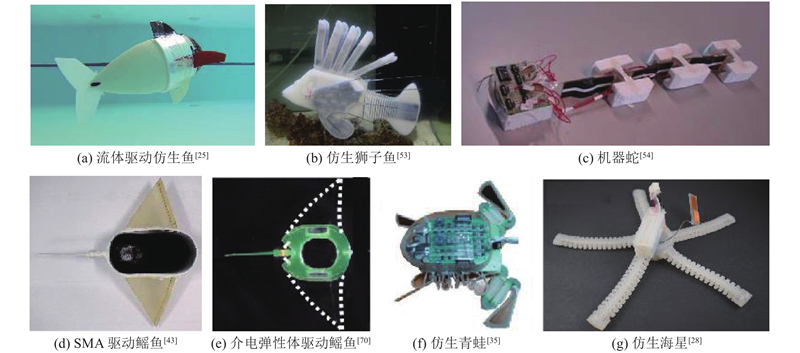


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}