

目前,国内外学者针对各种类型机械手的设计方法、结构设计、运动学分析、性能指标等方面进行了许多分析. 在设计方法方面,Huang[5]提出多种空间型3自由度等向性机械手的设计方法,并以3自由度机器手作为模块开发六自由度冗余机器手. Babin等[6]采用行星轮系代替传统的转动关节,提出适用于受限空间内抓取细小物体的机械手设计方法;于红英等[7-8]提出变胞并联机构设计方法,通过分解作业任务,得到基于子任务的基本支链构型,组合变型实现变胞并联机构的综合. 在结构设计方面,Yang等[9]利用螺旋理论,得到由平行运动元件组成的运动链,通过对这些运动链的综合,设计用于自动对接的2自由度平移机构. Erol等[10-11]从机构的操作和抓取需求出发,分析平面机械手和空间机械手的自由度与结构形式,并对所设计机械手的抓取性能进行分析. Gao等[12-14]设计能够实现自适应包络抓取功能的机械手,对不同形状的物体具有较好的适应性. 在运动学分析方面,Lu等[15-16]推导机械手指尖接触力的计算公式,并提出最优自适应控制方案,通过力分解来调节最优接触力. 在性能指标方面,Hwang等[17-19]提出机械手的工作空间指数、运动或力传递指数、灵活度指数等性能指标,对机械手的结构尺寸参数进行优化设计. 但是,钢拱架拼接机械手须具备结构简单,占用空间小,坚固可靠,对接精度高等特点,使其能够在空间受限、重载的条件下完成钢拱架抓取、调整、对接等动作,以上研究都无法直接应用于钢拱架安装.
为了设计出能够代替人工实现钢拱架安装需求的机构,从钢拱架安装形式与机构运动自由度要求出发,对钢拱架的抓取对接机构进行构型设计和性能分析. 基于图谱法,对抓取对接机构进行构型设计;根据功能等效性,获得各支链满足功能要求的若干运动副,通过叠加组合获得机构整体构型;建立抓取对接机构的运动学模型,求得机构初始位置的逆解;提出机构性能指标,利用螺旋理论,分析机构抓取模块的传递性能,优化结构尺寸参数.
1. 图谱法构型设计的基本理论
1.1. 线几何理论
抓取对接机构的自由度和约束是构型设计的基础,基于Grassmann线几何,通过引入线簇的方法对其进行描述,机构作基本运动(转动或移动)时的自由度和约束的表征如表1所示. 表中,实线表示自由度,虚线表示约束.
表 1 线图的表示形式及意义
Tab.1
| 转动自由度线 | 移动自由度线 | 约束线 | 力偶约束线 |
| | | | |
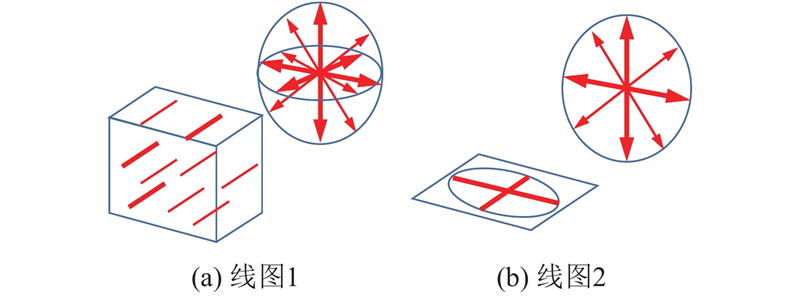
将这些元素进行组合,可以扩展成一个线图,用于表示抓取对接机构的线空间,包括自由度空间或约束空间. 如图1所示为一些基本型线空间的线图表达形式和映射关系.
图 1
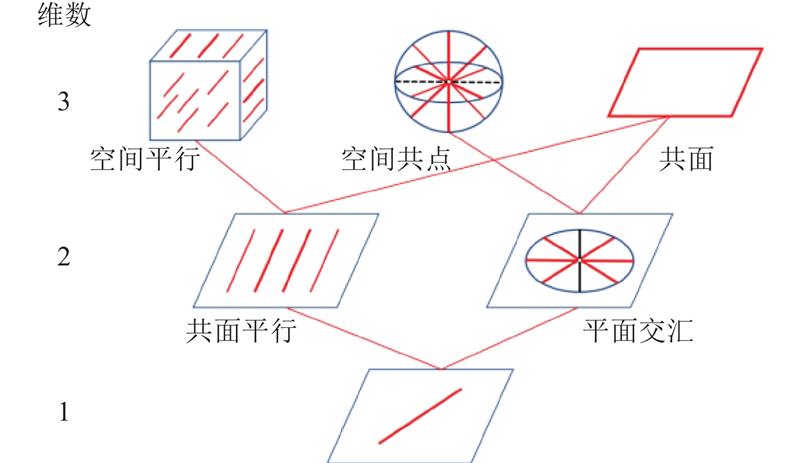
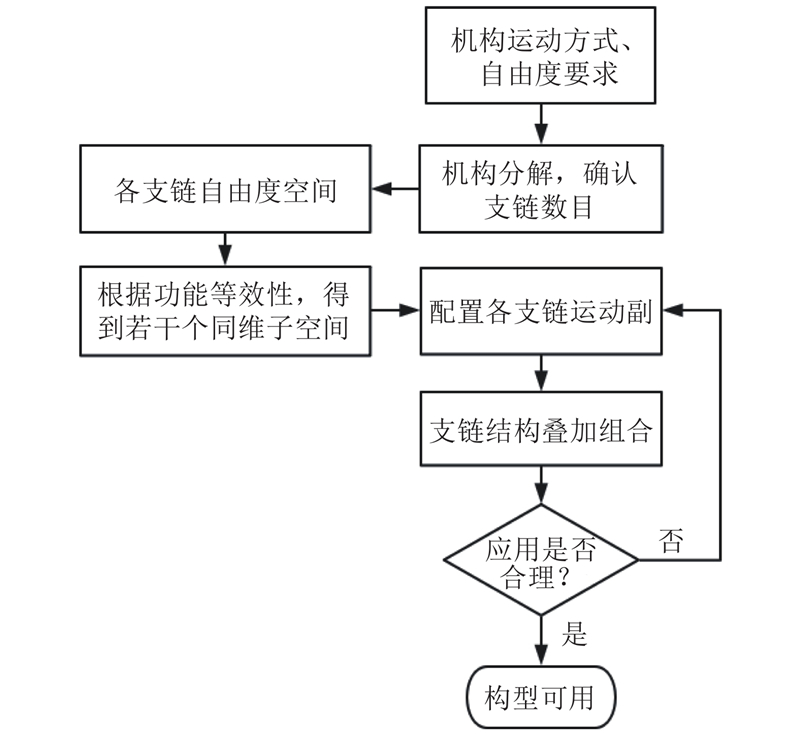
基于线图分析法,可以实现抓取对接机构的构型设计,即图谱法构型设计. 图谱法的构型设计流程如图2所示. 从TBM钢拱架的运动轨迹要求出发,确定抓取对接机构的运动方式和自由度要求;依据抓取对接机构的预期功能实现形式,将其分解成若干支链;根据线几何理论,确定各支链自由度空间;由线图的功能等效性原则,得到若干同维子空间,并为各子空间配置合理的运动副;将得到所有支链结构进行叠加组合,根据抓取对接机构的实际应用需求,选择最合理的机构构型.
图 2
1.2. 螺旋理论
利用螺旋理论研究抓取对接机构的传递性能,单位运动旋量可以通过Plücker坐标表示为
式中:
单位旋量$1和$2之间的互易积为
若$1和$2的互易积为零,则$1是$2的反旋量,反之亦然.
2. 抓取对接机构的构型设计
2.1. 抓取对接机构的功能需求
传统TBM钢拱架的拼接以人工为主,机械为辅,劳动强度较大,工作效率较低,如图3所示. 在整个钢拱架的拼接过程中,须人工完成钢拱架位姿调整、螺栓预连接以及钢拱架撑紧后的螺栓紧固工作,严重影响施工效率.
图 3

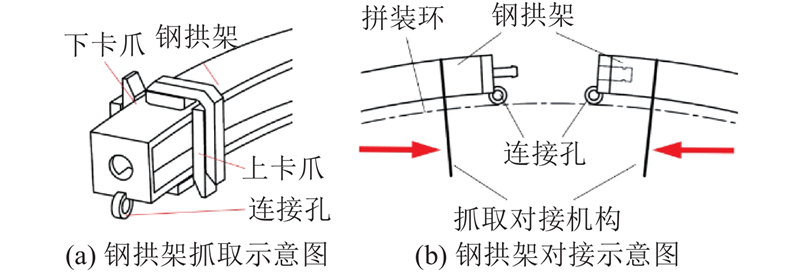
为了实现钢拱架快速拼接,须设计钢拱架拼接机械手抓取对接机构,以替代人工作业. 该机构须具备以下功能要求. 1)几何尺寸要求. 由于拼装环、主梁框架的空间位置约束,要求在设计拱架对接机构的几何尺寸时,考虑在有限的空间内实现拱架对接的所有动作. 2)运动特性要求. 机构须能够灵活地对钢拱架进行抓取、调整与对接,且在工作过程中不与钢拱架发生干涉碰撞. 3)结构强度要求. 拱架对接机构采用Q235钢材料,在工作过程中,须保证钢拱架对接精度小于10 mm,要求所设计结构的强度和刚度满足设计要求.
图 4
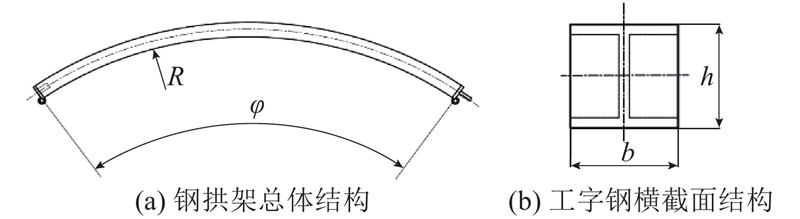
为了适应钢拱架自动拼接的要求,在现有钢拱架的基础上,增加插销连接与单向自锁机构,设计免螺栓工序的新型钢拱架结构,如图5所示. 图中,R为钢拱架半径,h为横截面工字钢的腰高,b为腿宽,φ为钢拱架周向角度.
图 5
2.2. 抓取对接机构的构型设计
要完成钢拱架抓取对接作业,须上、下2个卡爪分别在工作空间内完成相应运动,故将机构分为2个支链进行研究.
1)下卡爪支链设计. 在进行抓取对接作业时,下卡爪须在钢拱架所在竖直平面内进行位置调整,以到达钢拱架抓取点位置;在完成钢拱架抓取之后,在该平面上进行相应位置移动,实现钢拱架对接;下卡爪支链须具有转动能力,以调整抓取姿态. 根据线图分析法,得到下卡爪支链的自由度空间与约束空间,如图6所示. 根据空间线图的功能等效性[20],可以得到其自由度空间的同维子空间,并配置相应运动副,如表2所示. 表中,R表示转动关节(revolute joint),P表示移动关节(prismatic joint). 下卡爪作为机构的输出末端,须由移动关节带动,以方便对钢拱架进行夹持动作,因此RPP、PRP、RRP结构可以作为下卡爪机构的构型选择参考.
表 2 线图的同维子空间及运动副
Tab.2
| 同维子空间 | 运动简图 |
| | |
图 6

表 3 线图1的同维子空间及运动副
Tab.3
| 同维子空间 | 运动简图 |
| | |
表 4 线图2的同维子空间及运动副
Tab.4
| 同维子空间 | 运动简图 |
| | |
图 7
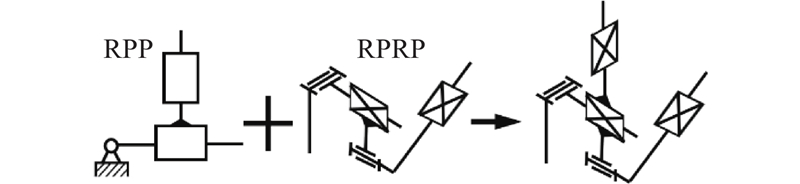
上卡爪与下卡爪配合完成钢拱架抓取动作,需要上卡爪与下卡爪始终位于同一空间平面内,且保持相同的转动姿态. 因此,上卡爪支链与下卡爪支链的位姿调整部分的结构可以重叠,在简化机构的同时,保证2个卡爪位姿的一致性. 例如,在将上支链的RPRP结构进行一定的关节转动后,和下支链的RPP结构进行叠加,得到如图8所示的结构.
图 8
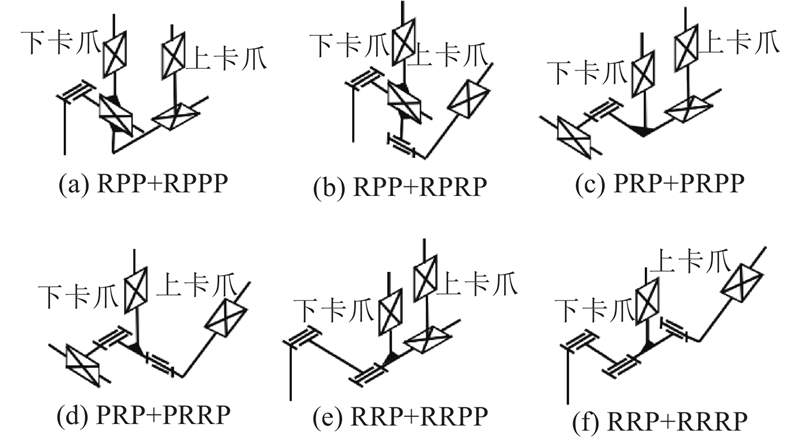
3)抓取对接机构的构型确定. 通过分析两支链结构的可叠加性,获得能够满足机构运动要求的结构,如图9所示. 可以看出,构型(e)、(f)在完成钢拱架抓取动作之后,需要2个相互平行的转动副共同控制,才能完成钢拱架对接作业,使得机构控制更加困难,而且钢拱架不方便在TBM有限的空间内进行较多的姿态变换,容易出现干涉现象,故构型(e)、(f)不予考虑;构型(c)、(d)的钢拱架抓取部分的结构从平移滑块上伸出,在机构及钢拱架重量的作用下,会产生较大挠度,不满足钢拱架高对接精度的要求;构型(a)、(b)均可以实现钢拱架抓取对接功能,但是构型(a)须设置横向导轨,用于实现上、下卡爪的分离,考虑到TBM内部工作空间有限,选择构型(b)作为钢拱架抓取对接机构的基本构型.
图 9
抓取对接机构须同时抓取2榀钢拱架进行对接,将基本构型对称布置,得到机构的结构示意图,如图10(a)所示. 根据机构的功能,将其分为抓取模块和对中模块. 抓取模块通过滑块O0、O1固定在对中模块上,“L”型下卡爪固定在滑块O2、O3上,上卡爪固定在滑块O4、O5上.
图 10

图 10 抓取对接机构的结构示意图
Fig.10 Schematic diagram of structure of grasping docking mechanism
4)抓取模块结构优化. 抓取模块在进行钢拱架夹持动作时,须控制构件E0G0进行转动. 当机构靠近钢拱架时,下卡爪下降,同时构件E0G0下摆,使得V型口张开. 在进行夹持作业时,下卡爪上升,同时构件E0G0上摆,V型口闭合. 可以利用滑块,将下卡爪与构件E0G0连接起来,如图11所示. 在满足机构抓取需求的同时,减少输入控制,优化机构性能.
图 11
3. 基于运动学模型的位置参数设计
3.1. 运动学模型建立
图 12

动坐标系E0-uvw相对于定坐标系B0-xyz,沿y轴逆时针旋转了
在定坐标系B0−xyz下,动坐标系原点E0的位置矢量为
式中:
可以解得
在动坐标系E0-uvw中,机构的输出点间的矢量
式中:
式(6)可以化简为
根据新型钢拱架工字钢的尺寸与空间位置,可以得到
根据抓取模块机构的结构,可以得到
联立式(8)、(9),可以得到滑块O2位置的逆解表达式:
式中:
由式(8)得到滑块O4位置:
I0在定坐标系B0−xyz下的位置矢量为
将式(5)代入式(12)可以得到
为了使卡爪的抓取效果更好,令抓取模块与钢拱架垂直布置,如图13所示.
图 13
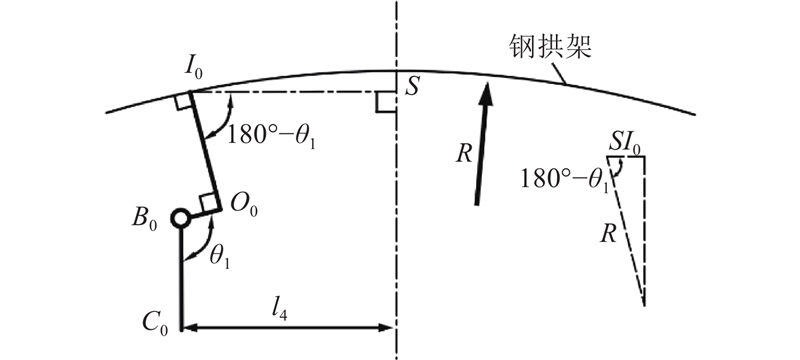
可以解得机构的转动角θ1:
3.2. 性能指标与尺度优化
3.2.1. 机构的传递性能指标
图 14
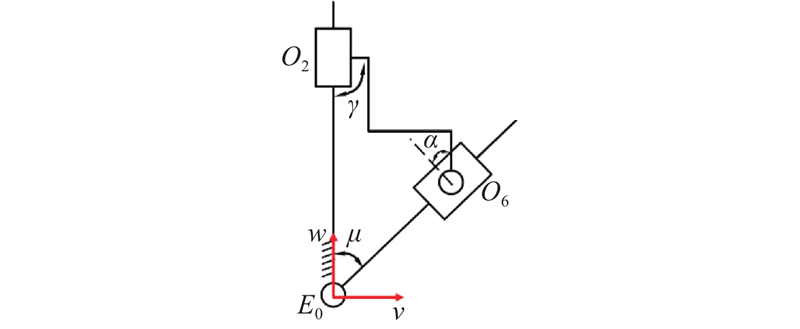
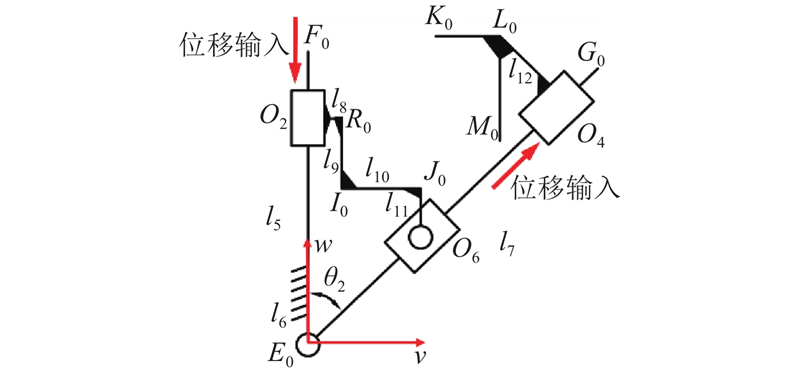
图 14 抓取模块闭环机构示意图
Fig.14 Schematic diagram of closed loop mechanism of grasp module
1)局部传递指标. 为了评价机构抓取模块的运动和力传递性能,定义机构的局部传递指标为
式中:
2)全局传递指标. 局部传递指标只能判断抓取模块在单一姿态下运动或力传递的有效性. 抓取模块是在连续的工作空间内作业的,为了判断整个工作空间上的运动或力传递,定义全局传递指标:
式中:W为工作空间,即传递角度满足局部传递指标要求的集合或位姿,
3)能耗系数. 由于抓取模块的机构闭环,其上所有旋量必定线性相关,存在不全为零的数
除去驱动副和输出副之外的运动副旋量线性无关,可以构成旋量系
定义输入传递系数
3.2.2. 机构的工作空间参数优化
在动坐标系E0-uvw上,驱动副旋量为
式中:
可以得到,该模块的约束螺旋系包含1个约束力和2个轴线相互垂直的约束力偶,即该模块约束u轴上的移动自由度和v、w轴上的转动自由度.
可以求解得到抓取模块闭环机构的
由式(17)、(18)可以得到
从而得到机构的传递系数:
机构的局部传递指标可以定义为
计算得到,当45°≤θ2≤57°时,
可以得到
可以得到抓取对接机构的全局传递指标和工作空间最大值θ2max之间的关系,利用Matlab软件生成其关系图,如图15所示. 可以看出,这种抓取对接机构的全局传递指标至少为0.75,具有较好的传递性能;机构的全局传递指标在θ2max位于π/4和11π/32附近时取得较大值,当
图 15

图 15 工作空间与全局传递指标的关系
Fig.15 Relationship between workspace and global transfer index
4. 抓取对接机构的样机实验
表 5 机构各油缸的速度控制
Tab.5
| 时间/s | 控制速度/(mm·s−1) | |||
| 1号油缸 | 2号油缸 | 3号油缸 | 4号油缸 | |
| 0~10 | 0 | 0 | 12.50 | 12.00 |
| 10~20 | 13.00 | 0 | 0 | 0 |
| 20~40 | 0 | 0 | 6.25 | 5.00 |
| 40~60 | 0 | 6.25 | 0 | 0 |
图 16

抓取对接机构的工作过程分为4个部分:3号油缸收缩,4号油缸伸长,机构的抓取模块张开;1号油缸伸长,将抓取模块上举;当钢拱架进入抓取模块后,3号油缸伸长,4号油缸收缩,将钢拱架抓紧;2号油缸伸长,将钢拱架往中间拉扯,实现钢拱架的对接.
实验结果表明,整个钢拱架拼接所用时间为60 s,其中钢拱架抓取与对接所用时间占总时间的2/3,拼接效率较高;在钢拱架抓取过程中,未发生机构与钢拱架碰撞、钢拱架滑移情况,抓取效果较好;在对接过程中,钢拱架销钉孔对准效果较好,孔中心轴线位置距离小于5 mm,满足钢拱架对接精度要求,证明了机构的可行性.
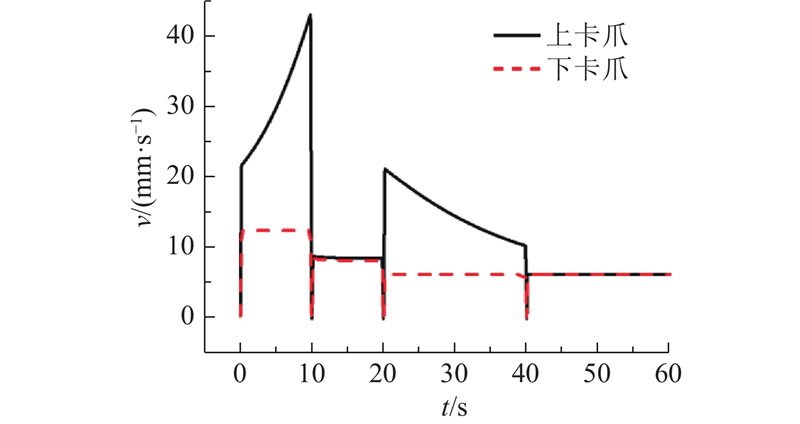
将实验数据结合Adams软件,可以得到抓取对接机构2个输出末端在工作过程的速度,如图17所示. 图中,v为速度. 可以看出,在抓取模块张开和夹紧的过程中,上卡爪的速度大于下卡爪,在其余时间内2个卡爪速度相同;在整个工作过程中,2个输出末端的速度均小于50 mm/s,机构始终处于低速平稳的工作状态,稳定性较高,证明了机构的可靠性.
图 17
5. 结 论
(1)基于图谱法进行抓取对接机构的构型设计,将机构分为上卡爪支链和下卡爪支链,分别得到其自由度空间和约束空间;根据功能等效性,获得各支链自由度空间的同维子空间,为其配置合理的运动副;通过对两支链结构进行叠加组合,获得机构整体构型.
(2)建立抓取对接机构的运动学模型,得到机构各滑块位置与机构转动角的逆解;建立机构的性能指标,利用螺旋理论,分析机构抓取模块的传递性能,得到较优的工作空间范围.
(3)制作抓取对接机构的样机,对其进行钢拱架抓取、对接的位姿测试,并结合Adams进行卡爪速度仿真,验证了机构的可行性.
本研究对于抓取对接机构最优构型的评估方法,采用的是基于工作空间、运动精度和操作控制难度的定性判断形式,未能给出具体的评估指标. 下一步将对机构的抓取模块作进一步的优化设计,减轻设备的重量,提高设备的可靠性. 此外,须对机构的控制方面进行研究与分析,进一步提高钢拱架的拼接效率与拼接精度.
参考文献
TBM机电耦合建模与同步控制策略对比分析
[J].DOI:10.3901/JME.2018.01.120 [本文引用: 1]
TBM electromechanical coupling modeling and comparative analysis of synchronous drive control strategy
[J].DOI:10.3901/JME.2018.01.120 [本文引用: 1]
隧道掘进机支撑推进系统振动特性
[J].
Vibration characteristics of TBM supporting-thrusting system
[J].
基于施工数据的TBM支撑推进协调控制系统
[J].
Coordinated control of gripper and thrust system for TBM based on construction data
[J].
Analysis of tunnel-support interaction using an equivalent boundary beam
[J].DOI:10.1016/j.tust.2018.11.021 [本文引用: 1]
A general method for developing different types of 3-DOF and 6-DOF isotropic manipulators
[J].
Picking, grasping, or scooping small objects lying on flat surfaces: a design approach
[J].DOI:10.1177/0278364918802346 [本文引用: 1]
少自由度变胞并联机构综合设计方法
[J].
Type synthesis method of lower-mobility metamorphic parallel mechanism
[J].
面向作业任务的约束变胞机构设计方法
[J].DOI:10.3901/JME.2018.03.026 [本文引用: 1]
Task-orientated design method of practical constraint metamorphic mechanisms
[J].DOI:10.3901/JME.2018.03.026 [本文引用: 1]
Design of 2-degrees-of-freedom (DOF) planar translational mechanisms with parallel linear motion elements for an automatic docking device
[J].DOI:10.1016/j.mechmachtheory.2017.11.005 [本文引用: 1]
A study on dexterous grasps via parallel manipulation analogy
[J].
A 7-DOF redundantly actuated parallel haptic device combining 6-DOF manipulation and 1-DOF grasping
[J].DOI:10.1016/j.mechmachtheory.2019.01.002 [本文引用: 1]
Design of a truss-shaped deployable grasping mechanism using mobility bifurcation
[J].DOI:10.1016/j.mechmachtheory.2019.05.003 [本文引用: 1]
PASA-GB hand: a novel parallel and self-adaptive robot hand with gear-belt mechanisms
[J].
The UHVAT gripper: usable holding versatile adjustable tool to grasp different objects
[J].DOI:10.1016/j.ifacol.2018.08.404 [本文引用: 1]
Analysis of coordinated grasping kinematics and optimization of grasping force of a parallel hybrid hand
[J].
Optimal adaptive Jacobian internal forces controller for multiple whole-limb manipulators in the presence of kinematic uncertainties
[J].DOI:10.1016/j.mechatronics.2018.05.005 [本文引用: 1]
Design optimization method for 7 DOF robot manipulator using performance indices
[J].DOI:10.1007/s12541-017-0037-0 [本文引用: 1]
Transmission index research of parallel manipulators based on matrix orthogonal degree
[J].
A novel planar parallel manipulator with high orientation capability for a hybrid machine tool: kinematics, dimensional synthesis and performance evaluation
[J].DOI:10.1017/S0263574715000958 [本文引用: 1]
Type synthesis of 4-DOF parallel kinematic mechanisms based on grassmann line geometry and atlas method
[J].DOI:10.3901/CJME.2013.06.1073 [本文引用: 1]
七自由度番茄收获机械手的轨迹规划与仿真
[J].
Trajectory planning and simulation for 7-DOF tomato harvesting manipulator
[J].
Design of a novel 3-DOF parallel kinematic mechanism: type synthesis and kinematic optimization
[J].DOI:10.1017/S0263574714000551 [本文引用: 1]
5-PSS/UPU并联机构的多目标性能参数优化
[J].
Multi-target parameters of performance optimization for 5-PSS/UPU parallel mechanism
[J].
Optimal design of a new spatial 3-DOF parallel robot with respect to a frame-free index
[J].DOI:10.1007/s11431-008-0305-4 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}