

一般来讲,鲁棒控制[3-5]能够保证规定的输出跟踪性能,但需要使用很大的反馈增益来保证实际应用中的高控制精度. 自适应鲁棒控制方法[6]可以通过对系统参数的自适应降低反馈增益,取得很好的瞬态和稳态性能[7-10],但由于控制律中采用了饱和函数有界抑制鲁棒控制的思想,导致其不能实现时变干扰下的渐进跟踪控制. Yao等[11-12]使用扩张状态观测器估计液压系统中的干扰,Kim等[13]设计扰动观测器来估计电液执行器中的偏置正弦失配扰动,但这2种方法无法处理同时存在的匹配和不匹配干扰. Won等[14]设计能够同时处理匹配和不匹配干扰的高增益干扰观测器,但使用了未知的压力动态,理论上无法获得准确的干扰估计. Levant等[15-16]提出有限时间干扰观测器(FTDO),取得了很好的拓展[17],但由于实际系统中干扰的随机性,很难实现高精度控制.
本文提出基于FTDO的渐进鲁棒积分跟踪控制策略. 采用系统参数的名义值,系统中所有的不确定性集中到干扰中,通过FTDO对干扰进行估计,从而实现针对干扰的前馈补偿;结合RISE,实现对实习系统中干扰的完全处理;采用期望补偿,降低噪声对跟踪性能的影响,使系统获得了全局渐进稳定的性能,增强了电液位置伺服系统抵抗干扰的能力.
1. 系统建模与问题描述
考虑的电液位置伺服系统结构如图1所示,惯性负载运动学方程为
图 1
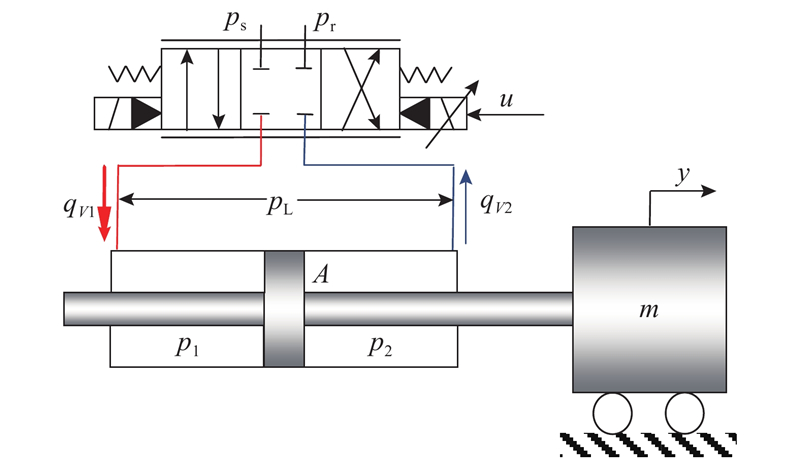
图 1 电液位置伺服系统原理图
Fig.1 Schematic diagram of electro-hydraulic position servo system
式中:m和y分别为运动部件的惯性负载和负载位移;pL=p1−p2为液压缸负载压差,其中p1和p2分别为液压缸左、右两腔的压力;A为液压缸内腔的有效作用面积;B为有效黏性阻尼系数;f(t)为系统其他未建模干扰,包含未建模摩擦、未建模动态、外干扰等,其中t为时间变量.
忽略外部泄露,系统的压力动态方程为
式中:Vt为系统控制腔总容积;βe为液压缸有效容积液体弹性模数;Ct为液压缸内的泄露系数;q(t)为系统压力动态建模误差;qVL=(qV1+qV2)/2为伺服阀负载体积流量,其中qV1和qV2分别为伺服阀进入/流出液压缸左/右腔的液压体积流量.
忽略阀芯动态,则伺服阀的负载体积流量方程为
式中:Kt和ps分别为伺服阀控制流量增益和系统供油压力,u为系统控制输入.
为了方便控制器设计,定义系统状态变量为
式中:
φ1=B/m,φ2=4A2βe/(mVt),φ3=4βeCt/Vt都是系统的名义参数;d1为系统的不匹配干扰,d1=f(t)/m;d2为系统的匹配干扰,d2=4Aβeq(t)/(mVt).
为了方便系统的设计,作出以下假设.
1)电液位置伺服系统在正常工况下工作,液压缸左、右两腔的压力p1和p2须满足如下条件:0<pr<p1<ps,0<pr<p2<ps,其中pr为系统回油压力.
2)期望位置指令x1d∈C3且有界.
3)干扰项dk(k=1,2)是4−k阶可导的.
2. FTDO的设计
设计有限时间干扰观测器,估计式(4)中的匹配和不匹配干扰,具体形式如下:
式中:ai>0(i=1,2,3,4,5)为观测器系数;μ0、μ3、μ1、μ2和μ4分别为x2、x3、d1、
定义估计误差为σ0=μ0−x2,σ1=μ1−d1,
式中:lk为dk(3−k)(k=1,2)的Lipschitz常数,由文献[16]可知,观测器误差系统(见式(6))是有限时间稳定的,即存在一个有限时间使得σi=0.
3. 控制器的设计
定义如下误差变量:
式中:e1为系统的跟踪误差;x1d为系统的期望位置指令信号;k1、k2、k3均为正的反馈增益;r为辅助误差信号,由式(4)、(7)可知,r的扩展形式为
为了抑制传感器的测量噪声,采用期望指令信号x1d、x2d、x3d分别代替x1、x2、x3进行补偿,在期望情况下,e1=0,d1=0,则有
将式(9)代入式(8),可得
在期望情况下,由e1恒为0可以推出
设计鲁棒控制器如下:
式中:k3>0,kr>0为控制器增益,β>0为鲁棒增益,ua为基于模型的补偿项,us1为线性鲁棒反馈项,us2为RISE鲁棒项.
根据式(11)设计模型补偿项ua为
式中:
基于该鲁棒控制器,将式(13)代入式(10),可得
对式(14)两边求微分,可得
式中:λ1=(φ2+φ1φ3)k12−(φ1+φ3−k1)k13,λ2= (φ1+φ3−k1)(k12+k1k2+k22)−k23−(φ2+φ1φ3)(k1+k2),λ3=φ2+φ1φ3+k22+k2k3−(φ1+φ3−k1)(k1+k2+k3)k13,λr=φ1+φ3−k1−k2,
根据式(6)与假设3,可知
式中:δ1、δ2为已知正数.
4. 稳定性证明
由式(7)、(15)可知,系统的动态误差方程为
为了方便后续控制器稳定性的证明,给出如下的引理.
引理1 定义变量L(t)及辅助函数P(t)如下:
若鲁棒增益β满足条件:
则有P(t)>0恒成立.
定理1 给定一个非线性系统,如式(4)所示,若在满足式(19)的条件下,通过调节反馈增益k1、k2、k3、kr,能够使得如下定义的矩阵Λ为正定矩阵:
则提出的控制律(12)能够保证所有的系统信号都是有界的,且当时间趋于无穷大时,系统误差e1能够渐进收敛到0.
证明:根据控制理论中系统的稳定性分析,选取Lyapunov方程为
由引理1可知,V恒为正.
定义变量e=[e1,e2,e3,r]T,将式(17)、(21)代入求导后的Lyapunov方程,可得
因此有
由式(23)可知:
对式(23)积分,可得
由式(24)可知,
5. 实验结果
为了验证所提的控制策略,采用4种性能指标(最大值、平均值、标准差、归一化的控制输入变化量)评价跟踪的性能,分别定义如下.
1)跟踪误差的最大绝对值为
式中:N为记录的数字信号的数量.
2)跟踪误差的平均值为
3)跟踪误差的标准差为
4)归一化的控制输入变化量为
式中:u(i)为控制输入;
电液位置伺服系统实验平台如图2所示. 该平台由如下部分组成:一个包含导轨的工作台;一个由双杆液压缸组成的液压定位系统,高效冲压面积A=904.778 mm2,行程为±44 mm;用于测量位置和速度信息的线性编码器,精度等级为±5 μm,型号为Heidenhain LC483;2个用于测量p1和p2的油压传感器,型号为MEAS US175-C00002-200BG,测量精度为1 bar;带宽在120 Hz以上的伺服阀,型号为Moog G761-3003,额定体积流量为19 L/min,压力为7 MPa;一个驱动轴;一个负载质量块,质量m=30 kg;ps=10 MPa的液压油供应路;测量和控制系统.
图 2

图 2 电液位置伺服系统实验平台
Fig.2 Experiment platform of electro-hydraulic position servo system
测量和控制系统由监控软件和实时控制软件组成,A/D卡型号为Advantech PCI-1716,D/A卡为Advantech PCI-1723,计数卡为Heidenhain IK-220,所有这些卡均为16位. 监控软件使用NI LabWindows/CVI编程,实时控制软件使用Microsoft Visual Studio 2005和Ardence RTX 7.0编译. Ardence RTX 7.0用于为Windows XP操作系统下的实时控制软件提供实时工作环境.
液压系统参数如下:m=30 kg,B=4 000 N/(m·s),A = 9.05×10−4 m2,Vt=7.96×10−5 m3,βe=700 MPa,Ct=10−12 m3/(s·Pa),kt=1.196 9×10−8 m3/(s·V·Pa−1/2),ps=10 MPa,pr=0.08 MPa,采样时间为0.5 ms.
为了验证提出控制方案的有效性,选取以下4种控制策略进行对比实验.
1)基于FTDO的鲁棒积分跟踪控制器,记为RF,具体形式为式(12)、(13).
2)有限时间干扰观测器,记为FTDO,具体形式如下:
3)速度前馈PI控制器,记为VFPI,具体形式如下:
式中:e1(t)=x1−x1d;kP、kI、kD分别为比例常数、积分常数、微分常数;kF为速度前馈系数,取为0.028 1 V·s/mm.
4)反馈线性化控制器,记为FLC,具体形式如下:
各控制策略的参数取值如下.
1)RF参数如下:k1=1 800,k2=200,k3=100,kr=100,β=500,a1=30,a2=25,a3=40,a4=6 000,a5=1 000.
2)FTDO参数如下:k1=1 800,k2=200,k3=100,a1=30,a2=25,a3=40,a4=6 000,a5=1 000.
3)VFPI参数:kP=8 000,kI=2 000,kD=0.
4)FLC参数:k1=1 800,k2=200,k3=100.
对于实验测试信号的幅值选取,是依据现有的实验平台物理参数进行选取的. 由于实验平台液压缸活塞的行程是±44 mm,选择一个在该行程之间的测试信号幅值,选为10 mm.
对于测试信号的频率选取,是根据图3所示的实验辨识的摩擦力(系统主要的干扰)曲线进行选取的. 图中,f′为摩擦力,v为速度. 在实际情况下,一般实验工况均为0.5 Hz的中等速度工况,为了考查RF控制器在不同频率下的跟踪性能,选择3种频率进行实验,分别为0.5、0.2、1.0 Hz.
图 3
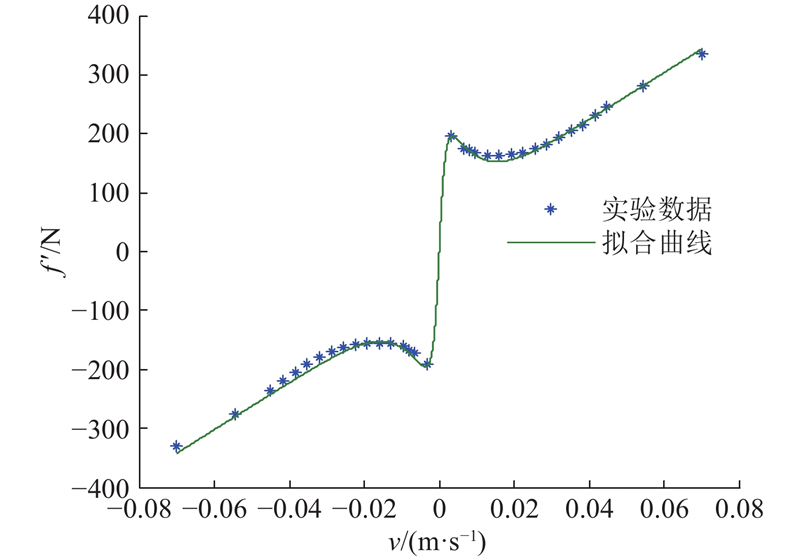
对于测试信号幅值为10 mm,实验工况为0.2 Hz的正弦测试信号,最大速度约等于0.013 m/s,由辨识的摩擦力曲线可知,在该速度范围内运动,系统的摩擦力集中在未建模的Stribeck效应区域,可以用于验证提出的控制算法对于未建模扰动的鲁棒性;对于测试信号幅值为10 mm,实验工况为0.5 Hz的正弦测试信号,最大速度为0.031 4 m/s,属于中等速度区域;对于测试信号幅值为10 mm,实验工况为1 Hz的正弦信号,最大速度为0.062 8 m/s,属于较快速工况.
5.1. 工况1
在0.5 Hz的中等速度工况下,选取期望指令信号为x1d=10arctan (sin(πt))[1−e-t]/0.785 4 mm.
如图4所示为RF控制器作用下的干扰估计. 如图5所示为各控制器作用下系统的跟踪误差对比. 可以看出,FLC作用下得到的跟踪误差效果不太理想;在FLC的基础上添加了FTDO的控制效果得到了极大的提高,不仅系统的跟踪精度明显提高,而且零点漂移问题得到了改善,说明所设计的FTDO观测器在控制性能的改善上发挥了至关重要的作用,验证了所设计FTDO观测器的有效性;RF控制策略是在FTDO的基础上融合了积分鲁棒控制,实验表明,跟踪精度得到了进一步的提升,由此可以推出新加入的积分鲁棒控制策略的有效性. 与FLC相比,RF控制器不仅极大地提高了系统的跟踪精度,而且零点漂移问题得到了改善,由此可以推出RF控制策略有很好的处理干扰,提高系统的跟踪精度.
图 4
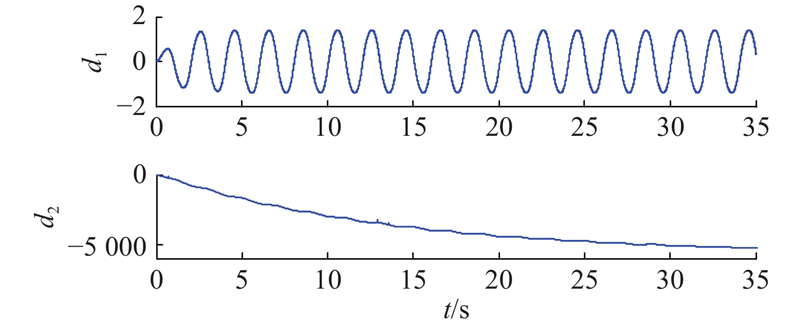
图 5
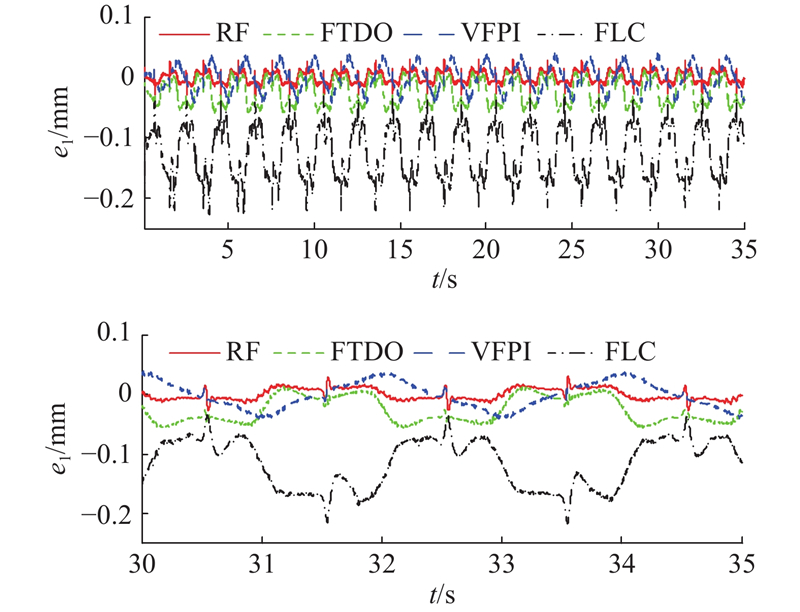
图 6
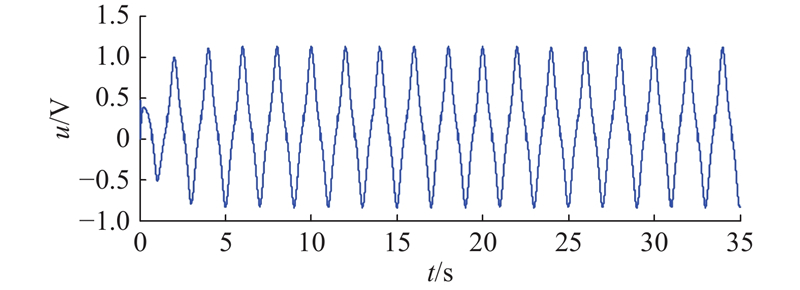
图 7
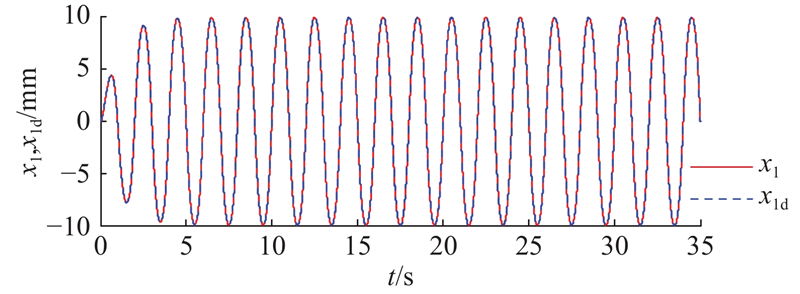
图 8

表 1 0.5 Hz工况下的性能指标表
Tab.1
| 指标 | Me | µ | σ | Lc |
| RF | 0.031 3 | 0.009 4 | 0.004 6 | 0.001 4 |
| FTDO | 0.056 9 | 0.024 4 | 0.019 1 | 0.002 8 |
| VFPI | 0.041 8 | 0.018 7 | 0.011 3 | 0.002 3 |
| FLC | 0.218 3 | 0.123 4 | 0.042 8 | 0.001 2 |
5.2. 工况2
由工况1可以看出,FLC的控制效果不太理想,之后的实验工况中只作了前3种控制器的对比实验. 在实验频率为0.2 Hz的慢变工况下,选取期望指令信号x1d=10arctan (sin(0.4πt))[1−e-t]/0.785 4 mm作为测试信号.
图 9

表 2 0.2 Hz工况下性能指标表
Tab.2
| 指标 | Me | µ | σ | Lc |
| RF | 0.017 9 | 0.001 7 | 0.001 7 | 0.000 5 |
| FTDO | 0.091 4 | 0.065 4 | 0.007 9 | 0.000 5 |
| VFPI | 0.010 9 | 0.004 6 | 0.002 5 | 0.000 9 |
5.3. 工况3
在实验频率为1 Hz的快变工况下,选取期望指令信号x1d=10arctan (sin (2πt))[1−e-t]/0.785 4 mm作为测试信号.
图 10
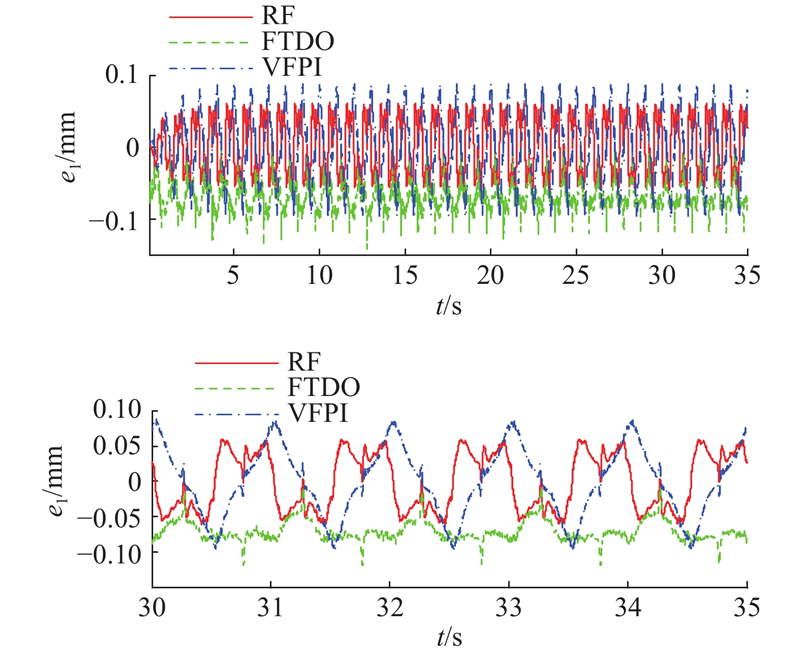
表 3 1 Hz工况下的性能指标表
Tab.3
| 指标 | Me | µ | σ | Lc |
| RF | 0.060 5 | 0.038 6 | 0.013 4 | 0.004 4 |
| FTDO | 0.119 3 | 0.069 9 | 0.015 7 | 0.004 4 |
| VFPI | 0.095 6 | 0.040 9 | 0.026 6 | 0.005 4 |
6. 结 语
本文提出基于FTDO的电液位置伺服系统鲁棒积分跟踪控制策略,实现了匹配干扰和不匹配干扰同时在线观测. 通过设计基于误差符号函数(RISE)的FTDO观测器,实现了干扰在线观测,将FTDO融合设计于RISE控制策略中,提高了干扰观测的准确度和系统的稳定性. 结合期望补偿提高了针对干扰的模型补偿精度,增强了电液位置伺服系统抵抗干扰的能力. 通过Lyapunov稳定性理论,证明了闭环系统的全局渐进稳定性. 对比实验结果显示,RF控制器与VFPI相比跟踪精度提高了25%左右,与FTDO相比跟踪精度提高了45%左右,有效解决了干扰对系统稳定性和跟踪精度的影响,提高了电液位置伺服系统在干扰作用下的跟踪性能.
本文对于高频下的指令跟踪问题讨论较浅,在后续的研究工作中,笔者将更加关注电液伺服系统高频非线性控制的研究工作.
参考文献
基于积分鲁棒的电液负载模拟器渐近跟踪控制
[J].
Asymptotic tracking control of electro-hydraulic load simulator based on integral robustness
[J].
Robust controller with disturbance rejection for hydraulic servo systems
[J].DOI:10.1109/41.184833 [本文引用: 1]
Nonlinear robust dual-loop control for electro-hydraulic load simulator
[J].DOI:10.1016/j.isatra.2015.10.013
Robust H∞ positional control of 2-DOF robotic arm driven by electro-hydraulic servo system
[J].DOI:10.1016/j.isatra.2015.09.014 [本文引用: 1]
Adaptive robust control of SISO nonlinear systems in a semi-strict feedback form
[J].DOI:10.1016/S0005-1098(96)00222-1 [本文引用: 1]
Integrated direct/Indirect adaptive robust control of hydraulic manipulators with valve deadband
[J].DOI:10.1109/TMECH.2010.2051037 [本文引用: 1]
Adaptive robust motion control of single-rod hydraulic actuators: theory and experiments
[J].
Coordinate control of energy saving programmable valves
[J].
Extended-state-observer-based output feedback nonlinear robust control of hydraulic systems with backstepping
[J].DOI:10.1109/TIE.2014.2304912 [本文引用: 1]
Backstepping control of electro-hydraulic system based on extended-state-observer with plant dynamics largely unknown
[J].DOI:10.1109/TIE.2016.2585080 [本文引用: 1]
Disturbance-observer-based position tracking controller in the presence of biased sinusoidal disturbance for electro-hydraulic actuators
[J].DOI:10.1109/TCST.2013.2237909 [本文引用: 1]
High-gain disturbance observer-based backstepping control with output tracking error constraint for electro-hydraulic systems
[J].DOI:10.1109/TCST.2014.2325895 [本文引用: 1]
Higher-order sliding modes, differentiation and output-feedback control
[J].
Smooth second-order sliding modes: missile guidance application
[J].DOI:10.1016/j.automatica.2007.01.008 [本文引用: 2]
Continuous finite-time output regulation for disturbed systems under mismatching condition
[J].DOI:10.1109/TAC.2014.2324212 [本文引用: 1]
Robustness of adaptive nonlinear control to bounded uncertainties
[J].DOI:10.1016/S1474-6670(17)58088-X [本文引用: 1]
Sliding-mode control for transformation to an inverted pendulum mode of a mobile robot with wheel-arms
[J].DOI:10.1109/TIE.2014.2384475 [本文引用: 1]
A continuous asymptotic tracking control strategy for uncertain nonlinear systems
[J].DOI:10.1109/TAC.2004.831148 [本文引用: 1]
Lyapunov-based tracking control in the presence of uncertain nonlinear parameterizable friction
[J].DOI:10.1109/TAC.2007.904254 [本文引用: 2]
Modular adaptive control of uncertain Euler-Lagrange systems with additive disturbances
[J].
Robust adaptive asymptotic tracking of nonlinear systems with additive disturbance
[J].
Composite adaptive control for Euler-Lagrange systems with additive disturbances
[J].DOI:10.1016/j.automatica.2009.10.017
Adaptive integral robust control and application to electromechanical servo systems
[J].DOI:10.1016/j.isatra.2017.01.024 [本文引用: 1]
Adaptive control of non-linear teleoperator systems in the presence of additive input and output disturbances
[J].
High-accuracy tracking control of hydraulic rotary actuators with modeling uncertainties
[J].DOI:10.1109/TMECH.2013.2252360
Bioinspired hydrodynamic force feedforward for autonomous underwater vehicle control
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}