|
|
|
| A rapid reconstruction method of simulation model based on point cloud and design model |
Jun CAI1( ),Gang ZHAO1,2,Yong YU1,3,*(),Qiang-wei BAO1,Sheng DAI1 ),Gang ZHAO1,2,Yong YU1,3,*(),Qiang-wei BAO1,Sheng DAI1 |
1. School of Mechanics and Automation, Beihang University, Beijing 100191, China
2. Key Laboratory of Aeronautics Smart Manufacturing, Beihang University, Beijing 100191, China
3. Beijing Engineering Technological Research Center of High-Efficient and Green CNC Machining Process, Beijing 100191, China |
|
|
|
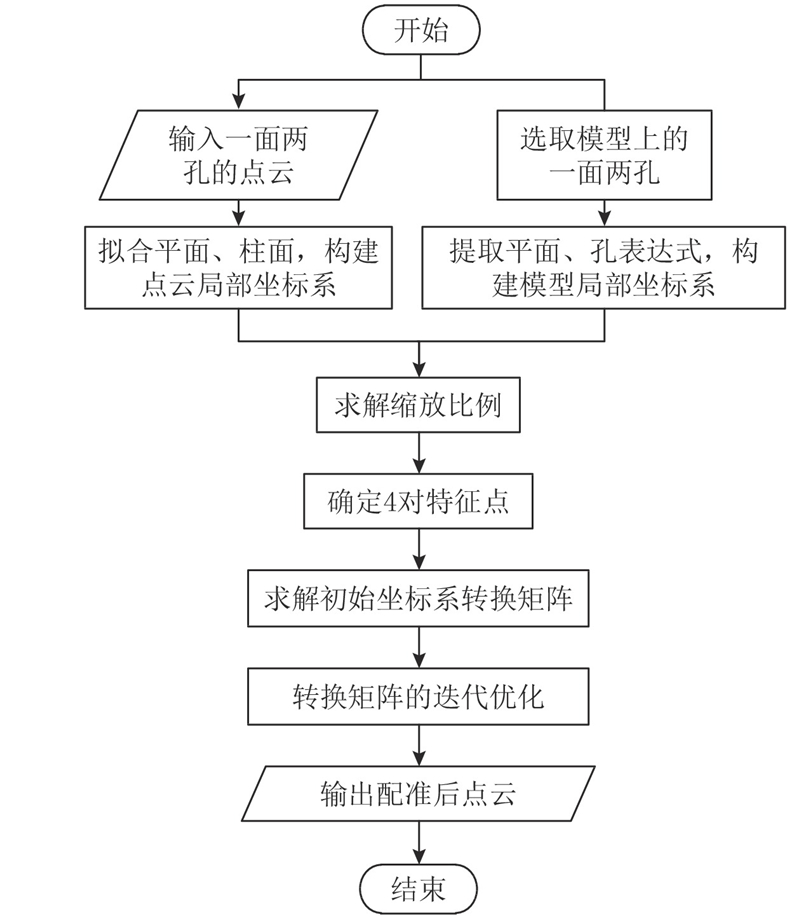
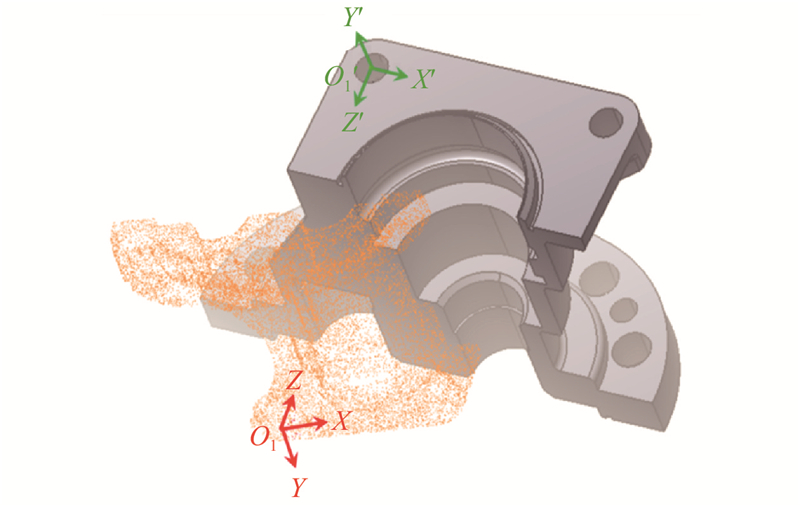
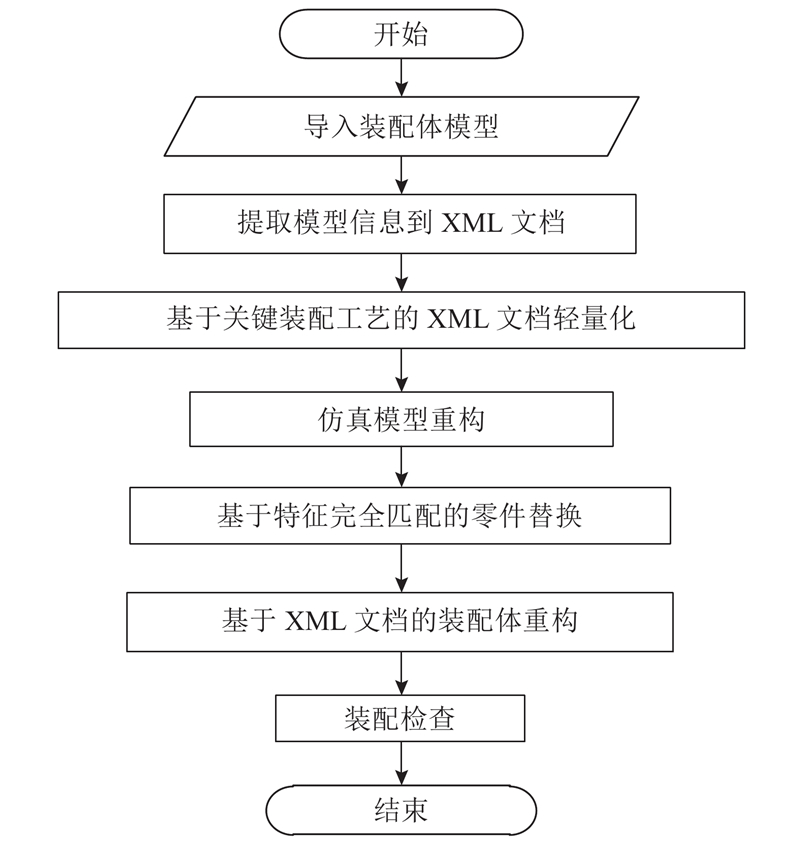
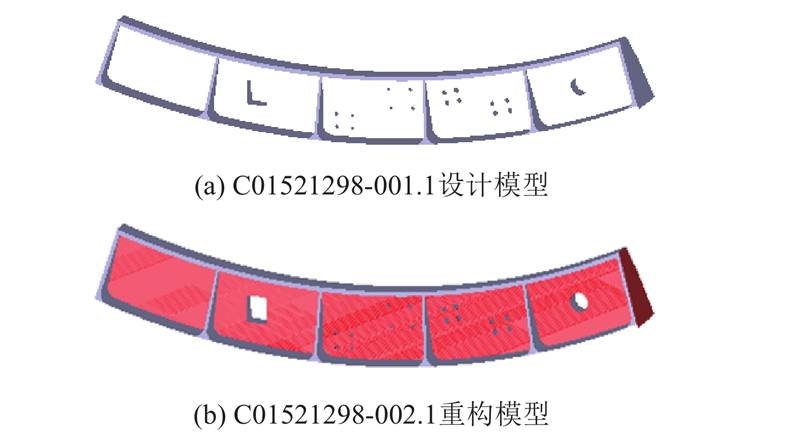
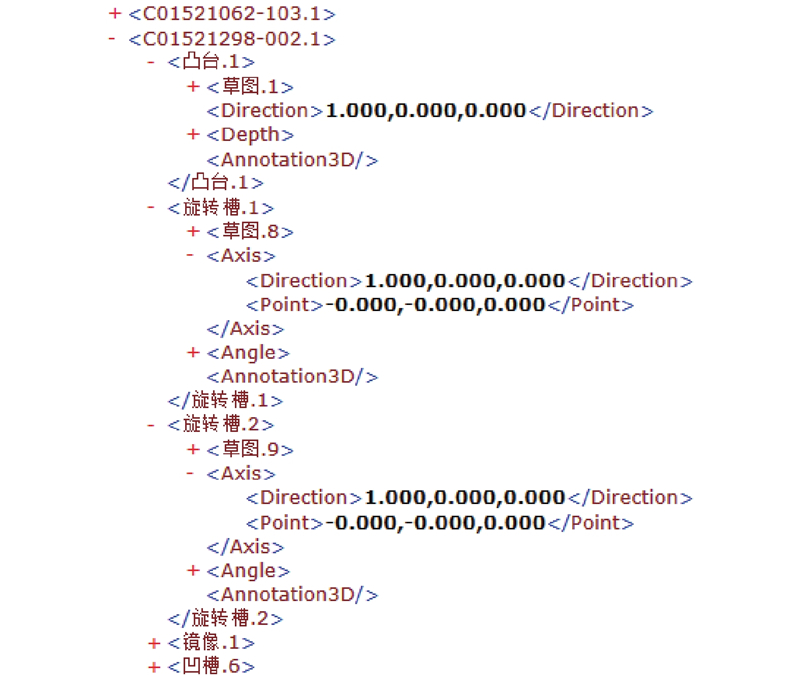
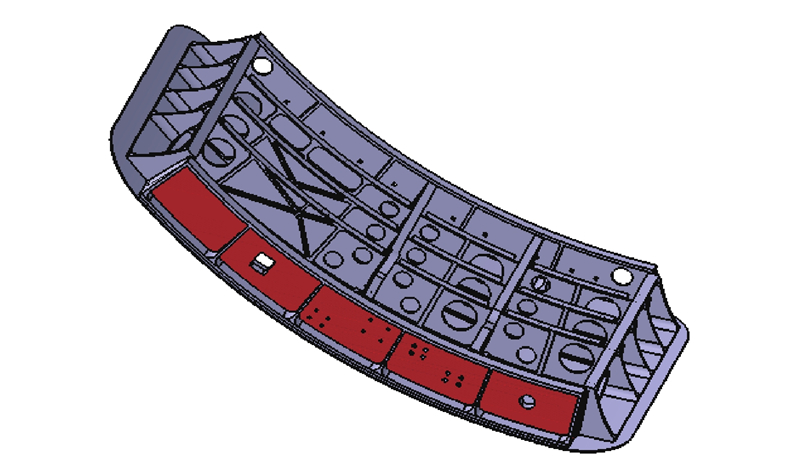
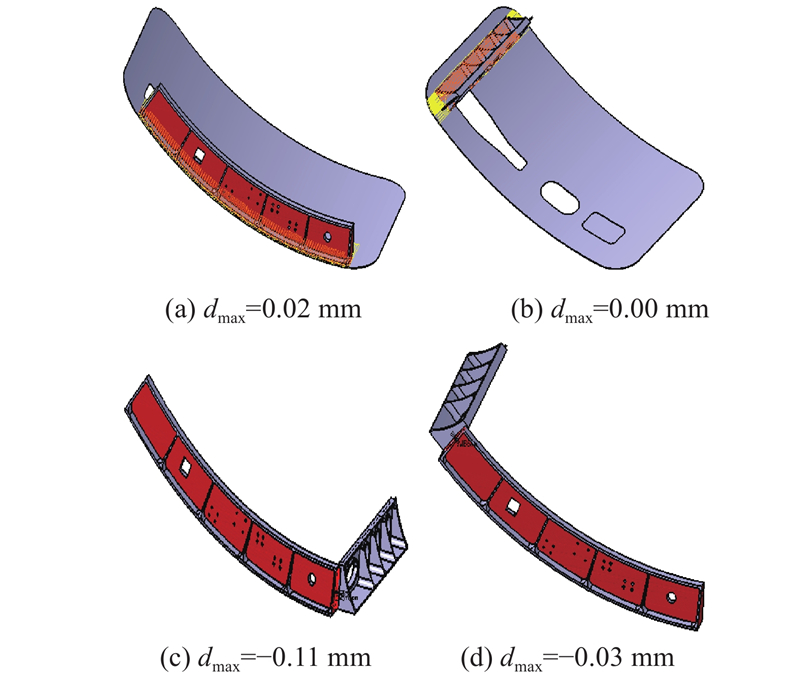
Abstract The high fidelity of CAD model in simulation test has been unsatisfied with the continuous improvement of product assembly quality requirements. A rapid reconstruction method of simulation model based on point cloud and design model was proposed in order to express the actual machining quality of parts quickly and accurately in the simulation experiment. The method of "one-plane and two-hole registration" was adopted to register the measured point cloud data to the design model. The control vertices in the boundary of the design model were extracted for surface reconstruction. Non-uniform rational B-spline (NURBS) method was used to fit the surface. The partial and efficient replacement of the model surface was realized, which combined boundary representation (BREP) and constructive solid geometry (CSG), with the simulation requirements. A rapid reconstruction module based on actual measured point cloud and design model, and a digital preinstalled module based on extensible markup language (XML) and fully features matched, were developed in CATIA. The reconstruction accuracy and efficiency of the proposed method, as well as its high efficiency and accuracy in the simulation of preassembly, were verified by taking a typical part of an aviation enterprise and assembly of aircraft door as examples.
|
|
Received: 29 April 2020
Published: 10 June 2021
|
|
|
| Fund: 工信部2017民用飞机专项科研技术资助项目 |
|
Corresponding Authors:
Yong YU
E-mail: 15600260806@163.com;yuyong@buaa.edu.cn
|
基于点云和设计模型的仿真模型快速重构方法
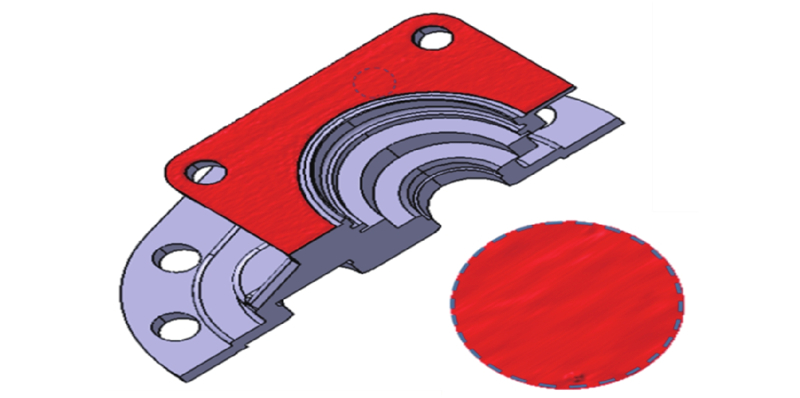
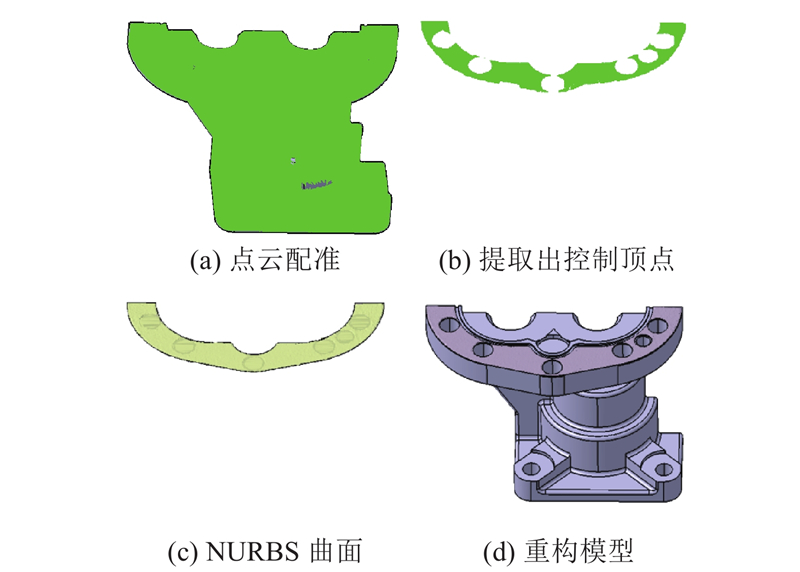
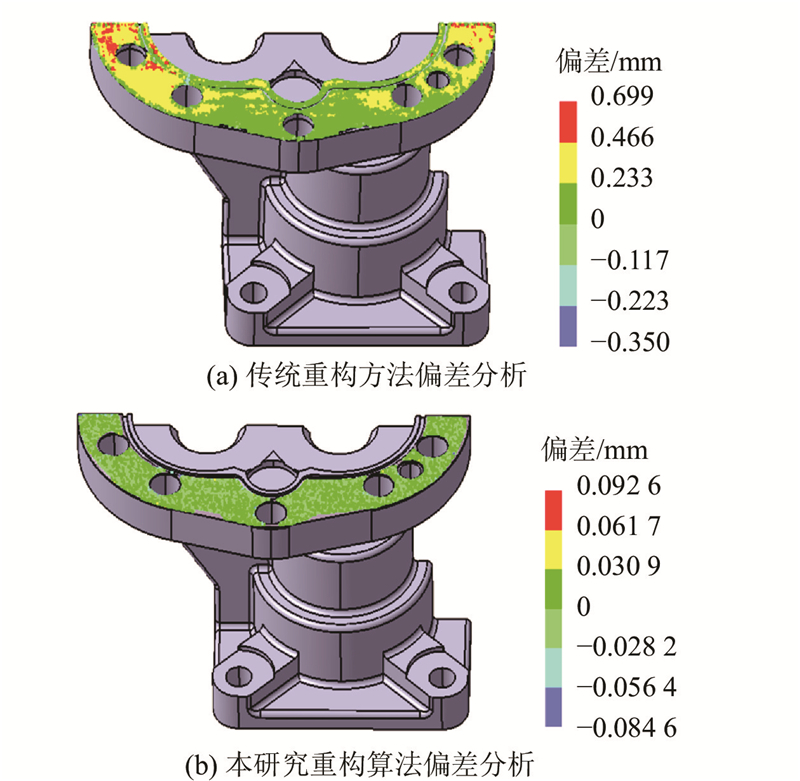
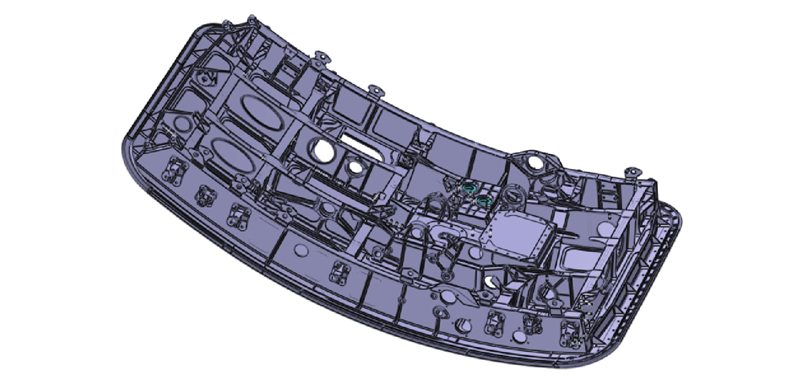
随着产品装配质量要求的不断提高,为了在CAD模型仿真试验中快速且准确地表达零件实际加工质量,提出基于点云和设计模型的仿真模型快速重构方法. 采用“一面两孔配准”方法,将零件实测点云数据配准到设计模型上;根据设计模型边界提取出曲面重构所需的控制顶点;采用非均匀有理B样条(NURBS)方法对控制顶点进行曲面拟合;根据仿真需求,结合边界表示法(BREP)和构造实体表示法(CSG)实现模型表面的局部和快速替换. 在CATIA中开发基于实测点云数据和设计模型的仿真模型快速重构模块,和基于可拓展标记语言(XML)和特征完全匹配的数字预装配模块. 以某航空企业典型零件和舱门预装配为例,验证该方法的重构精度和效率及其在预装配仿真中的高效性和准确性.
关键词:
点云重构,
点云配准,
点云提取,
非均匀有理 B 样条(NURBS),
曲面替换
|
|
| [1] |
张哲, 许宏丽, 尹辉 一种基于关键点选择的快速点云配准算法[J]. 激光与光电子学进展, 2017, 54 (12): 155- 163
ZHANG Zhe, XU Hong-li, YIN Hui A fast point cloud registration algorithm based on key point selection[J]. Laser and Optoelectronics Progress, 2017, 54 (12): 155- 163
|
|
|
| [2] |
杨明, 张冰, 王子才 建模与仿真技术发展趋势分析[J]. 系统仿真学报, 2004, (9): 1901- 1913
YANG Ming, ZHANG Bing, WANG Zi-cai The analysis of modeling and simulation development direction[J]. Journal of System Simulation, 2004, (9): 1901- 1913
doi: 10.3969/j.issn.1004-731X.2004.09.014
|
|
|
| [3] |
侯志霞. 民用飞机零部件制造过程数字孪生模型构建及应用[M]. 北京: 中国航空制造技术研究院, 2018.
|
|
|
| [4] |
OWEN S J, STATEN M L, CANANN S A, et al Q-Morph: an indirect approach to advancing front quad meshing[J]. International Journal for Numerical Methods in Engineering, 1999, 44: 1317- 1340
doi: 10.1002/(SICI)1097-0207(19990330)44:9<1317::AID-NME532>3.0.CO;2-N
|
|
|
| [5] |
王伟杰. 网格转化算法及复杂曲面重构研究[D]. 江西: 南昌大学, 2015.
WANG Wei-jie. The research of mesh conversion algorithm and complex surface reconstruction[D]. Jiangxi: Nanchang University, 2015.
|
|
|
| [6] |
MA W, KRUTH J P NURBS curve and surface fitting for reverse engineering[J]. The International Journal of Advanced Manufacturing Technology, 1998, 14 (12): 918- 927
doi: 10.1007/BF01179082
|
|
|
| [7] |
黄建梅. 基于深度图像的快速反求系统数据处理技术的研究[D]. 黑龙江: 哈尔滨理工大学, 2005.
HUANG Jian-mei. Research on technology of data processing of the rapid reverse system based on depth image[D]. Heilongjiang: Harbin University of Science and Technology, 2005.
|
|
|
| [8] |
张甜田. 基于分割点云的NURBS曲面三维重构方法研究[D]. 北京: 北京工业大学, 2013.
ZHANG Tian-tian. Research on the three-dimensional reconstruction of NURBS surface based on the segmentation of point cloud[D]. Beijing: Beijing University of Technology, 2013.
|
|
|
| [9] |
DONG Y D, SU F, SUN G J, et al A feature-based method for tire pattern reverse modeling[J]. Advances in Engineering Software, 2018, 124: 73- 89
doi: 10.1016/j.advengsoft.2018.08.008
|
|
|
| [10] |
王海舟, 张丽艳, 周良明, 等 批量复杂结构毛坯的快速逆向建模技术研究[J]. 中国机械工程, 2014, 25 (14): 1935- 1940
WANG Hai-zhou, ZHANG Li-yan, ZHOU Liang-ming, et al Rapid reverse modeling of batched complex blanks[J]. China Mechanical Engineering, 2014, 25 (14): 1935- 1940
doi: 10.3969/j.issn.1004-132X.2014.14.018
|
|
|
| [11] |
江旭, 耿楠, 张志毅, 等 基于假设检验匹配约束的点云配准算法研究[J]. 计算机应用研究, 2020, (3): 1- 8
JIANG Xu, GENG Nan, ZHANG Zhi-yi, et al Research of point cloud registration algorithm based on hypothesis test matching constraints[J]. Application Research of Computers, 2020, (3): 1- 8
|
|
|
| [12] |
BESL P J A method for registration of 3D shapes[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1992, 14 (3): 239- 256
|
|
|
| [13] |
杨长强, 叶泽田 一种基于点对应的激光扫描仪外方位参数检校方法[J]. 测绘科学, 2011, 36 (5): 190- 192
YANG Chang-qiang, YE Ze-tian A calibration method for laser scanner's external orientation by corresponding points[J]. Science of Surveying and Mapping, 2011, 36 (5): 190- 192
|
|
|
| [14] |
陈广锋, 刘文剑, 金天国 工件定位特征识别与定位方案自动推理算法[J]. 哈尔滨工业大学学报, 2005, (2): 238- 241
CHEN Guang-feng, LIU Wen-jian, JIN Tian-guo Focating feature recognition and locating design automation[J]. Journal of Harbin Institute of Technology, 2005, (2): 238- 241
doi: 10.3321/j.issn:0367-6234.2005.02.027
|
|
|
| [15] |
高瑞, 李泷杲, 黄翔, 等 复杂曲面零件散乱点云特征点提取[J]. 航空制造技术, 2017, (13): 60- 65
GAO Rui, LI Long-gao, HUANG Xiang, et al Extracting feature points in scattered point cloud of complex surface parts[J]. Aeronautical Manufacturing Technology, 2017, (13): 60- 65
|
|
|
| [16] |
周培德. 计算几何: 算法设计与分析[M]. 北京: 清华大学出版社, 2008.
|
|
|
| [17] |
陈瑞卿, 周健, 虞烈 一种判断点与多边形关系的快速算法[J]. 西安交通大学学报, 2007, 41 (1): 59- 63
CHEN Rui-qing, ZHOU Jian, YU Lie Fast method to determine spatial relationship between point and polygon[J]. Journal of Xi'an Jiaotong University, 2007, 41 (1): 59- 63
doi: 10.3321/j.issn:0253-987X.2007.01.014
|
|
|
| [18] |
MARTIN R R, STROUD I A, MARSHAL A D. Data reduction for reverse engineering[M]. Budapest: Computer and Automation Institute of Hungarian Academy of Science, 1996.
|
|
|
| [19] |
施法中. 计算机辅助几何设计与非均匀有理B样条[M]. 北京: 高等教育出版社, 2001.
|
|
|
| [20] |
李圆, 张献州, 陈霄, 等 基于NURBS的轨道板点云外形尺寸检测研究[J]. 铁道标准设计, 2020, 64 (3): 48- 53
LI Yuan, ZHANG Xiang-zhou, CHEN Xiao, et al Research on track slab point cloud dimensional deviation inspection based on NURBS[J]. Railway Standard Design, 2020, 64 (3): 48- 53
|
|
|
| [21] |
VERGEEST S M CAD surface data exchang using STEP[J]. Computer Aided Design, 1991, 23 (4): 269- 281
doi: 10.1016/0010-4485(91)90067-7
|
|
|
| [22] |
PIEGL L Modifying the shape of rational B-splines, part 2: surface[J]. Computer-Aided Design, 1989, 21 (9): 538- 546
doi: 10.1016/0010-4485(89)90014-6
|
|
|
| [23] |
DAUM S, BORRMANN A Processing of topological BIM queries using boundary representation based methods[J]. Elsevier Journal of Advanced Engineering Informatics, 2014, 6 (1): 273- 287
|
|
|
| [24] |
罗振伟, 梅中义 基于测量数据的飞机数字化预装配技术[J]. 航空制造技术, 2013, (20): 99- 102
LUO Zhen-wei, MEI Zhong-yi Aircraft digital preassembly technology based on measured data[J]. Aeronautical Manufacturing Technology, 2013, (20): 99- 102
doi: 10.3969/j.issn.1671-833X.2013.20.019
|
|
|
| [25] |
张敏, 田锡天, 耿俊浩, 等 基于预装配精度分析的飞机关键装配工序质量控制技术[J]. 航空制造技术, 2019, 62 (5): 51- 56
ZHANG Min, TIAN Xi-tian, GEN Jun-hao, et al Quality control technology for key assembly procedure of aircraft based on preassembly precision analysis[J]. Aeronautical Manufacturing Technology, 2019, 62 (5): 51- 56
|
|
|
| [26] |
产品几何技术规范(GPS) 几何公差检测与验证: GB/T 1958—2017 [S]. 北京: 中国国家标准化管理委员会, 2017.
|
|
|
| [27] |
李剑. 基于激光测量的自由曲面数字化制造基础技术研究[D]. 杭州: 浙江大学, 2008.
LI Jian. Research on the digital manufacturing technology of free from surface based on laser measurement[D]. Hangzhou: Zhejiang University, 2008.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|