| Mechanical and Energy Engineering |
|


|
|
|
| Dynamic characteristics of spatial parallel mechanism with spherical joint clearance |
Yan-biao LI( ),Tao-tao XU,Hang ZHENG,Ze-sheng WANG ),Tao-tao XU,Hang ZHENG,Ze-sheng WANG |
| College of Mechanical Engineering, Zhejiang University of Technology, Hangzhou 310032, China |
|
|
|
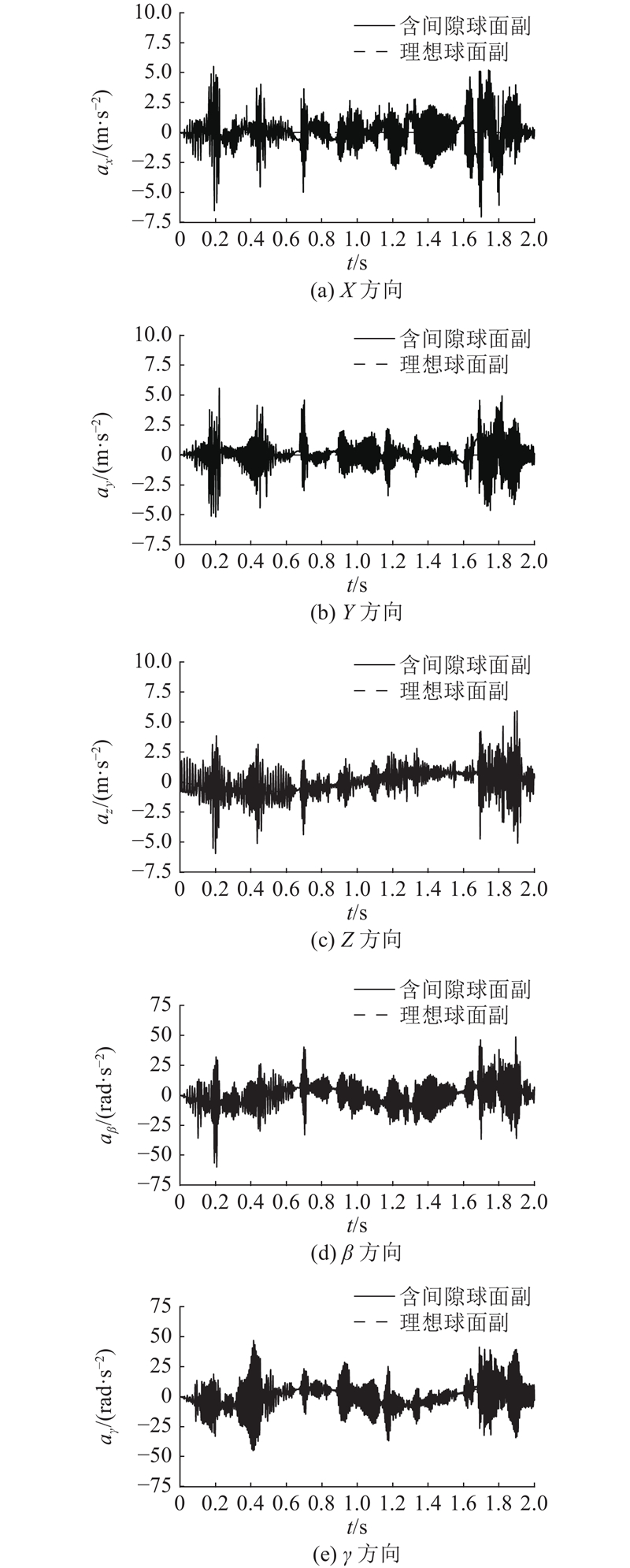
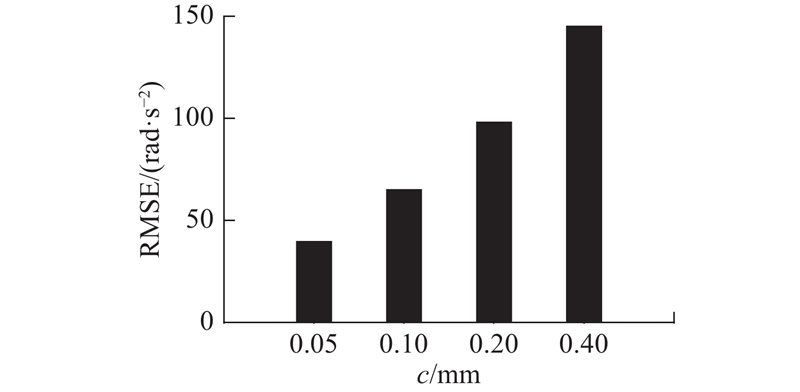
Abstract A rigid body dynamics model of a spatial parallel mechanism with multiple spherical joint clearances was established, in order to analyze the dynamic characteristics of the 5-PSS/UPU parallel mechanism with spherical joint clearances. A kinematic model of parallel mechanism with spherical joint clearances was established based on the 'contact-separation' two-state model. The normal and tangential contact force models between the kinematic joint elements were established based on an improved contact model and a modified Coulomb friction model, and the contact force was further transformed into the centroid of the component corresponding to the kinematic joint elements. The Newton-Eulerian method combined with the Lagrange multiplier was used to establish the dynamic model of the parallel mechanism with clearances and the dynamic characteristics were analyzed by numerical simulation.The root-mean-square error (RMSE) values of the angular acceleration of the moving platform with clearance of 0.05, 0.10, 0.20 and 0.40 mm were calculated, which were 40.046, 65.385, 98.489 and 145.715 rad/s2, respectively. Results show that in the case where there are multiple spherical joint clearances, when the clearance value increases, the dynamic performance of the spatial parallel mechanism visibly deteriorates.
|
|
Received: 29 April 2019
Published: 10 March 2020
|
|
|
含球面副间隙的空间并联机构动态特性
为了分析含球面副间隙的5-PSS/UPU并联机构的动态特性,建立含多个球面副间隙的空间并联机构的刚体动力学模型. 基于“接触-分离”二状态模型建立含球面副间隙的运动学模型;基于改进的接触模型和修正的Coulomb摩擦模型建立运动副元素之间的法向与切向接触力模型,进一步将接触力转化到运动副元素对应的部件质心;采用牛顿-欧拉法并结合拉格朗日乘子建立含间隙空间并联机构的动力学模型,利用数值仿真分析其动态特性,计算得到间隙分别为0.05、0.10、0.20、0.40 mm时的动平台角加速度均方根误差(RMSE)指标,分别为40.046、65.385、98.489、145.715 rad/s2. 结果表明,在存在多个球面副间隙的情况下,当间隙增加时,空间并联机构的动态性能严重退化.
关键词:
并联机构,
球面副间隙,
接触模型,
牛顿-欧拉法,
动态特性
|
|
| [1] |
HOU Y, HU X, ZENG D, et al Biomimetic shoulder complex based on 3-PSS/S spherical parallel mechanism[J]. Chinese Journal of Mechanical Engineering, 2015, 28 (1): 29- 37
doi: 10.3901/CJME.2014.0820.137
|
|
|
| [2] |
LI Y B, JIN Z L, JI S M, et al Design of mechanical coxa joints based on three-degree-of-freedom spherical parallel manipulators[J]. Journal of Mechanical Science and Technology, 2013, 27 (1): 103- 112
doi: 10.1007/s12206-012-1225-6
|
|
|
| [3] |
LI Y B, TAN D P, WEN D H, et al Parameters optimization of a novel 5-DOF gasbag polishing machine tool[J]. Chinese Journal of Mechanical Engineering, 2013, 26 (4): 680- 688
doi: 10.3901/CJME.2013.04.680
|
|
|
| [4] |
FLORES P, AMBROSIO J, CLAROJ C P, et al Dynamics of multibody systems with spherical clearance joints[J]. Journal of Computational and Nonlinear Dynamics, 2006, 1 (3): 240- 247
doi: 10.1115/1.2198877
|
|
|
| [5] |
TIAN Q, ZHANG Y Q, CHEN L P, et al Simulation of planar flexible multibody systems with clearance and lubricated revolute joints[J]. Nonlinear Dynamics, 2010, 60 (4): 489- 511
doi: 10.1007/s11071-009-9610-0
|
|
|
| [6] |
ERKAYA S, IBRAHIM U Experimental investigation of joint clearance effects on the dynamics of a slider-crank mechanism[J]. Multibody System Dynamics, 2010, 24 (1): 81- 102
doi: 10.1007/s11044-010-9192-0
|
|
|
| [7] |
ZHENG E, ZHU R, ZHU S, et al A study on dynamics of flexible multi-link mechanism including joints with clearance and lubrication for ultra-precision presses[J]. Nonlinear Dynamics, 2016, 83 (1/2): 137- 159
|
|
|
| [8] |
李豪杰, 张合, 李珂翔, 等 考 虑铰链间隙的水面并联稳定平台动力学分析[J]. 兵工学报, 2017, 38 (1): 129- 134
LI Hao-jie, ZHANG He, LI Ke-xiang, et al Dynamic analysis of offshore parallel stabilized platform in considering joint clearance[J]. Acta Armamentarii, 2017, 38 (1): 129- 134
doi: 10.3969/j.issn.1000-1093.2017.01.017
|
|
|
| [9] |
朱景原, 王见, 丁泽华, 等 含关节间隙的3-CPaRR并联机构的运动学和动力学分析 [J]. 振动与冲击, 2018, 37 (18): 9- 17
ZHU Jing-yuan, WANG Jian, DING Ze-hua, et al Kinematics and dynamics analysis of a 3-CPaRR parallel mechanism with joint clearance [J]. Journal of Vibration and Shock, 2018, 37 (18): 9- 17
|
|
|
| [10] |
ZHANG H D, ZHANG X M, ZHANG X C, et al Dynamic analysis of a 3-(P) under-barRR parallel mechanism by considering joint clearances[J]. Nonlinear Dynamics, 2017, 90 (1): 405- 423
doi: 10.1007/s11071-017-3672-1
|
|
|
| [11] |
VAREDI-KOULAEI S M, DANIALI H M, FARAJTABAR M, et al Reducing the undesirable effects of joints clearance on the behavior of the planar 3-RRR parallel manipulators[J]. Nonlinear Dynamics, 2016, 86 (2): 1007- 1022
doi: 10.1007/s11071-016-2942-7
|
|
|
| [12] |
侯雨雷, 汪毅, 李明洋, 等 一 种含间隙两转动一移动解耦并联机构混沌现象辨识[J]. 中国机械工程, 2015, 26 (13): 1759- 1766
HOU Yu-lei, WANG Yi, LI Ming-yang, et al Chaos identification of two rotational and one translational decoupled parallel mechanism concerning clearance[J]. China Mechanical Engineering, 2015, 26 (13): 1759- 1766
doi: 10.3969/j.issn.1004-132X.2015.13.010
|
|
|
| [13] |
王庚祥, 刘宏昭 考虑球面副间隙的4-SPS/CU并联机构动力学分析[J]. 机械工程学报, 2015, 51 (1): 43- 51
WANG Geng-xiang, LIU Hong-zhao Dynamics analysis of 4-SPS/CU parallel mechanism with spherical joint clearance[J]. Journal of Mechanical Engineering, 2015, 51 (1): 43- 51
doi: 10.3901/JME.2015.01.043
|
|
|
| [14] |
王庚祥, 刘宏昭, 邓培生 考 虑球面副间隙的并联机构动力学模型[J]. 振动与冲击, 2014, 33 (10): 43- 49
WANG Geng-xiang, LIU Hong-zhao, DENG Pei-seng Dynamics modeling for a parallel mechanism considering spherical joint clearance[J]. Journal of Vibration and Shock, 2014, 33 (10): 43- 49
|
|
|
| [15] |
陈修龙, 高文花, 宋浩, 等 含 球面副间隙的空间并联机构动力学特性分析[J]. 计算机集成制造系统, 2018, 24 (3): 660- 670
CHEN Xiu-long, GAO Wen-hua, SONG Hao, et al Dynamic characteristic analysis of spatial parallel mechanism with spherical clearance[J]. Computer Integrated Manufacturing Systems, 2018, 24 (3): 660- 670
|
|
|
| [16] |
CHEN X L, GAO W H, DENG Y, et al Chaotic characteristic analysis of spatial parallel mechanism with clearance in spherical joint[J]. Nonlinear Dynamics, 2018, 94 (4): 2625- 2642
doi: 10.1007/s11071-018-4513-6
|
|
|
| [17] |
CHEN X L, JIA Y H, DENG Y, et al Dynamics behavior analysis of parallel mechanism with joint clearance and flexible links[J]. Shock and Vibration, 2018, (6): 1- 17
|
|
|
| [18] |
MACHADO M, MOREIRA P, FLORES P, et al Compliant contact force models in multibody dynamics: evolution of the Hertz contact theory[J]. Mechanism and Machine Theory, 2012, 53: 99- 121
doi: 10.1016/j.mechmachtheory.2012.02.010
|
|
|
| [19] |
FLORES P, AMBROSIO J, CLARO J C P, et al Influence of the contact-impact force model on the dynamic response of multi-body systems[J]. Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-body Dynamics, 2006, 220 (1): 21- 34
doi: 10.1243/146441906X77722
|
|
|
| [20] |
AMBROSIO J. Impact of rigid and flexible multibody systems: deformation description and contact models [C]// NATO Advanced Study Institute on Virtual Nonlinear Multibody Systems. Prague: NATO ASI, 2002: 15-33.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|