| 自动化技术、计算机技术 |
|


|
|
|
| 基于数据驱动的膝关节外骨骼控制 |
张燕( ),王建宙,李威,王婕*(),陈玲玲,杨鹏 ),王建宙,李威,王婕*(),陈玲玲,杨鹏 |
| 河北工业大学 人工智能与数据科学学院,天津 300131 |
|
| Knee-joint exoskeleton control based on data-driven approach |
| Yan ZHANG(),Jian-zhou WANG,Wei LI,Jie WANG*(),Ling-ling CHEN,Peng YANG |
| School of Artificial Intelligence, Hebei University of Technology, Tianjin 300131, China |
引用本文:
张燕,王建宙,李威,王婕,陈玲玲,杨鹏. 基于数据驱动的膝关节外骨骼控制[J]. 浙江大学学报(工学版), 2019, 53(10): 2024-2033.
Yan ZHANG,Jian-zhou WANG,Wei LI,Jie WANG,Ling-ling CHEN,Peng YANG. Knee-joint exoskeleton control based on data-driven approach. Journal of ZheJiang University (Engineering Science), 2019, 53(10): 2024-2033.
链接本文:
http://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2019.10.020
或
http://www.zjujournals.com/eng/CN/Y2019/V53/I10/2024
|
| 1 |
KAZEROONI H, STEGER R The Berkeley lower extremity exoskeleton[J]. Journal of Dynamic Systems, Measurement and Control, 2006, 128 (1): 14- 25
doi: 10.1115/1.2168164
|
| 2 |
WALSH C J, ENDO K, HERR H A quasi-passive leg exoskeleton for load-carrying augmentation[J]. International Journal of Humanoid Robotics, 2007, 4 (3): 487- 506
doi: 10.1142/S0219843607001126
|
| 3 |
TSUKAHARA A, HASEGAWA Y, EGUCHI K, et al Restoration of gait for spinal cord injury patients using HAL with intention estimator for preferable swing speed[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2015, 23 (2): 308- 318
doi: 10.1109/TNSRE.2014.2364618
|
| 4 |
杨巍, 张秀峰, 杨灿军, 等 基于人机5杆模型的下肢外骨骼系统设计[J]. 浙江大学学报: 工学版, 2014, 48 (3): 430- 435
YANG Wei, ZHANG Xiu-feng, YANG Can-jun, et al Design of a lower extremity exoskeleton based on 5-bar human machine model[J]. Journal of Zhejiang University: Engineering Science, 2014, 48 (3): 430- 435
|
| 5 |
刘磊, 杨鹏, 刘作军 基于多源信息和广义回归神经网络的下肢运动模式识别[J]. 机器人, 2015, 37 (3): 310- 317
LIU Lei, YANG Peng, LIU Zuo-jun Lower limb locomotion modes recognition based on multiple-source information and general regression neural network[J]. Robot, 2015, 37 (3): 310- 317
|
| 6 |
KRAUSZ N E, LENZI T, HARGROVE L J Depth sensing for improved control of lower limb prostheses[J]. IEEE Transactions on Biomedical Engineering, 2015, 62 (11): 2576- 2587
doi: 10.1109/TBME.2015.2448457
|
| 7 |
路永乐, 张欣, 龚爽, 等 基于MEMS惯性传感器的人体多运动模式识别[J]. 中国惯性技术学报, 2016, 24 (5): 589- 594
LU Yong-le, ZHANG Xin, GONG Shuang, et al Recognition of multiple human motion patterns based on MEMS inertial sensors[J]. Journal of Chinese Inertial Technology, 2016, 24 (5): 589- 594
|
| 8 |
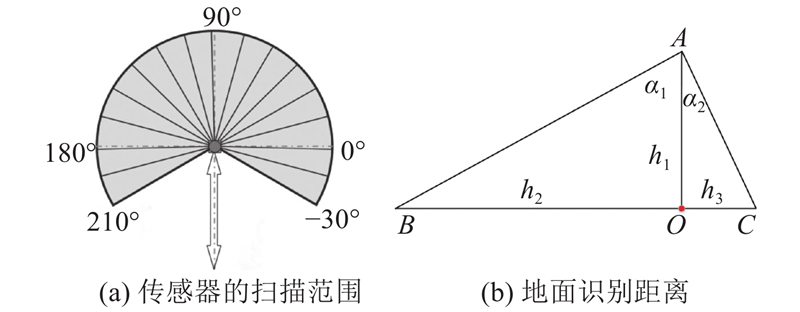
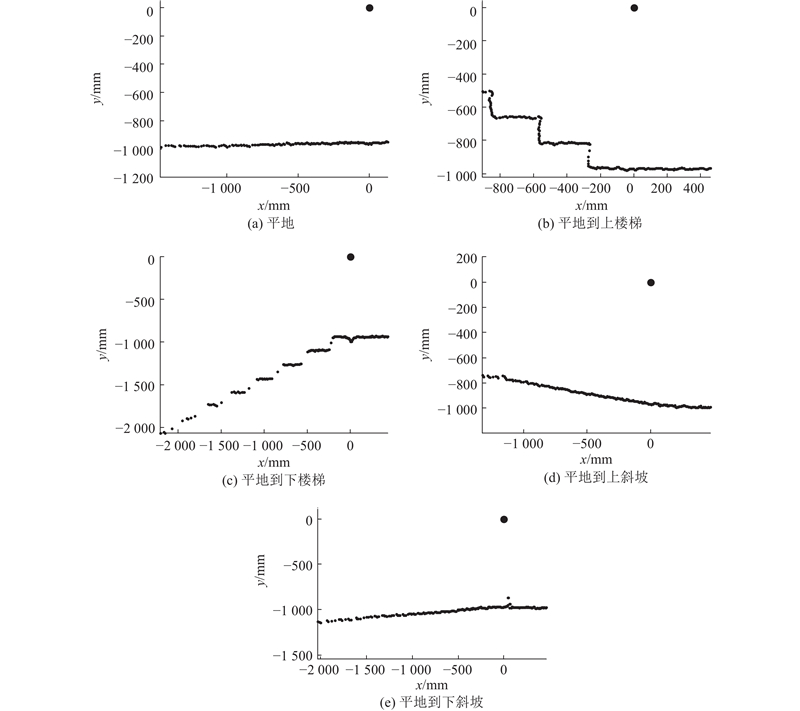
张燕, 许京, 陈玲玲, 等 基于激光距离传感器的路况识别系统的设计[J]. 激光与红外, 2016, 46 (3): 265- 270
ZHANG Yan, XU Jing, CHEN Ling-ling, et al Design of terrain recognition system based on laser distance sensor[J]. Laser and Infrared, 2016, 46 (3): 265- 270
doi: 10.3969/j.issn.1001-5078.2016.03.004
|
| 9 |
肖熙, 周路 基于k均值和基于归一化类内方差的语音识别自适应聚类特征提取算法法[J]. 清华大学学报: 自然科学版, 2017, 57 (8): 857- 861
XIAO Xi, ZHOU Lu Speech recognition adaptive clustering feature extraction algorithms based on the k-means algorithm and the normalized intra-class variance[J]. Journal of Tsinghua University: Science and Technology, 2017, 57 (8): 857- 861
|
| 10 |
PRATT J E, KRUPP B T, MORSE C J, et al. The RoboKnee: an exoskeleton for enhancing strength and endurance during walking [C]//IEEE International Conference on Robotics and Automation. New Orleans: IEEE, 2004: 2430-3435.
|
| 11 |
RIFAI H, MOHAMMED S, DJOUANI K, et al Toward lower limbs functional rehabilitation through a knee-joint exoskeleton[J]. IEEE Transactions on Control Systems Technology, 2017, 25 (2): 712- 719
doi: 10.1109/TCST.2016.2565385
|
| 12 |
CHEN X, ZENG Y, YIN Y H Improving the transparency of an exoskeleton knee joint based on the understanding of motor intent using energy kernel method of EMG[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2017, 25 (6): 577- 588
doi: 10.1109/TNSRE.2016.2582321
|
| 13 |
韩亚丽, 许有熊, 高海涛, 等 基于导纳控制的膝关节外骨骼摆动控制研究[J]. 自动化学报, 2016, 42 (12): 1944- 1950
HAN Ya-li, XU You-xiong, GAO Hai-tao, et al Knee joint exoskeleton swing control with admittance control[J]. Acta Automatica A Sinica, 2016, 42 (12): 1944- 1950
|
| 14 |
ZHU Y M, HOU Z S, QIAN F, et al Dual RBFNNs-based model-free adaptive control with aspen HYSYS simulation[J]. IEEE Transactions on Neural Networks and Learning Systems, 2017, 28 (3): 759- 765
doi: 10.1109/TNNLS.2016.2522098
|
| 15 |
BU X H, HOU Z S, ZHANG H W Data-driven multiagent systems consensus tracking using model free adaptive control[J]. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29 (5): 1514- 1524
doi: 10.1109/TNNLS.2017.2673020
|
| 16 |
XU D Z, SHI Y, JI Z C Model-free adaptive discrete-time integral sliding-mode-constrained-control for autonomous 4WMV parking systems[J]. IEEE Transactions on Industrial Electronics, 2018, 65 (1): 834- 843
doi: 10.1109/TIE.2017.2739680
|
| 17 |
WANG Z W, NASSER M N, HUANG T S Spatial-spectral classification of hyperspectral images using discriminative dictionary designed by learning vector quantization[J]. IEEE Geoscience and Remote Sensing Society, 2013, 52 (8): 4808- 4822
|
| 18 |
YANG H T, HUANG C M, HUANG Y C, et al A weather-based hybrid method for 1-day ahead hourly forecasting of PV power output[J]. IEEE Transactions on Sustainable Energy, 2014, 5 (3): 917- 926
doi: 10.1109/TSTE.2014.2313600
|
| 19 |
EKRAMIAN M, SHEIKHOLESLAM F, HOSSEINNIA S, et al Adaptive state observer for lipschitz nonlinear systems[J]. Systems and Control Letters, 2013, 62 (4): 319- 323
doi: 10.1016/j.sysconle.2013.01.002
|
| 20 |
HOU Z S, JIN S T Data-driven model-free adaptive control for a class of MIMO nonlinear discrete-time systems[J]. IEEE Transactions on Neural Networks, 2011, 22 (12): 2173- 2188
doi: 10.1109/TNN.2011.2176141
|
| 21 |
HOU Z S, ZHU Y M Controller-dynamic-linearization- based model free adaptive control for discrete-time nonlinear systems[J]. IEEE Transactions on Industrial Informatics, 2013, 9 (4): 2301- 2309
doi: 10.1109/TII.2013.2257806
|
| 22 |
HOU Z S, JIN S T A novel data-driven control approach for a class of discrete-time nonlinear systems[J]. IEEE Transactions on Control Systems Technology, 2011, 19 (6): 1549- 1558
doi: 10.1109/TCST.2010.2093136
|
| 23 |
黄萍, 钟慧敏, 陈博 正常青年人三维步态: 时空及运动学和运动力学参数分析[J]. 中国组织工程研究, 2015, 19 (24): 3882- 3888
HUANG Ping, ZHONG Hui-min, CHEN Bo Three- dimensional gait analysis in normal young adults: temporal, kinematic and mechanical parameters[J]. Chinese Journal of Tissue Engineering Research, 2015, 19 (24): 3882- 3888
doi: 10.3969/j.issn.2095-4344.2015.24.021
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|