


随着全球油气勘探向深地、深海及复杂地质环境推进,传统钻探技术在效率、成本与适应性方面面临严峻挑战。井下机器人因具有自主性强、受环境干扰小、可替代人工作业等优势,成为实现智能钻探的关键技术装备。
管道机器人技术的迅速发展为机器人在井下钻探提供了重要基础。在机械结构创新方面,仿生设计与自适应机构被广泛认为是提升机器人环境适应性的关键[1-3]。例如尺蠖式[4]、蠕虫式[5]等软体机器人展现了新型材料与气动驱动结构[6]的应用潜力。然而,这类结构常面临驱动复杂、输出推力有限以及在高压差环境下锚定可靠性不足的挑战。在运动规划与控制方面,优化的轨迹规划[7]与避障算法[8]提升了机器人在受限空间的操作效率,但该算法在井下复杂地质条件下的实时性与可靠性仍有待验证。与此同时,智能检测技术的发展,如多传感器融合[9-10]与人工智能[11]的应用,推动了管道检测的自动化,但现有研究多专注于缺陷识别,与钻探作业所需的强力支撑、高效推进等核心功能结合不够紧密。综上所述,尽管现有研究在结构仿生、运动规划和智能感知等方面取得了显著进展,但当机器人面对钻探作业这一特定场景时,在驱动机构的功率密度、复杂工况下的锚定稳定性以及作业功能专用化等方面仍存在明显不足[12-14]。
特别值得关注的是,王超等[15]关于排水管道检监测技术、装备及方法的综述印证了复杂井下环境对机器人结构刚性、驱动功率及环境感知能力的特殊要求。Ma等[16]关于管道缺陷检测视觉与传感技术的研究表明,计算机视觉与多传感器融合技术正推动管道检测向智能化、高精度方向发展。本研究聚焦于钻探机器人的核心功能——稳定锚定与高效推进,开展创新设计研究。主要研究内容包括:设计了连杆-滑块与支撑板一体化的支撑结构,实现了对每个支撑板独立电控调节;建立了考虑偏心载荷的静力学模型,分析非对称接触条件下撑靴的力学特性;通过快速样机研制与实验验证,探索低成本原型迭代的研发模式。研究结果可为复杂地质环境下的钻探作业提供新的技术解决方案。
1 钻探机器人设计
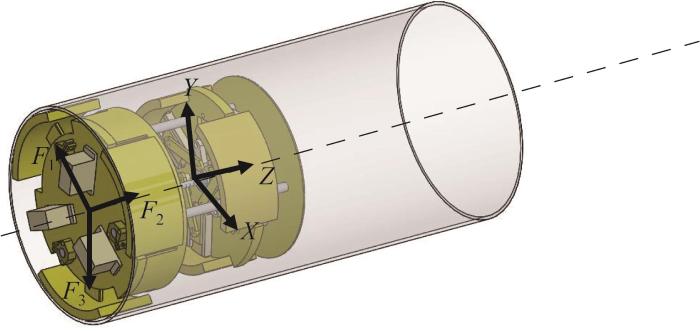
图1
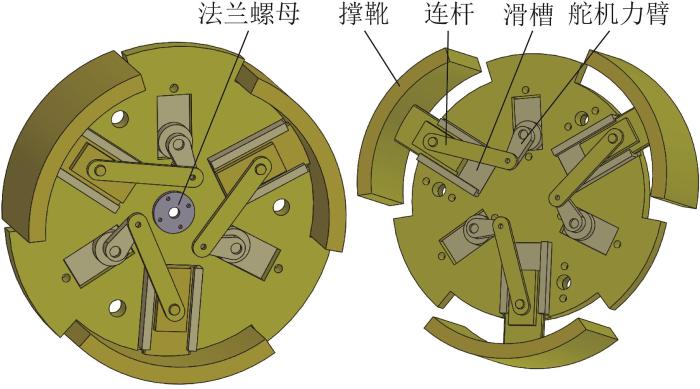
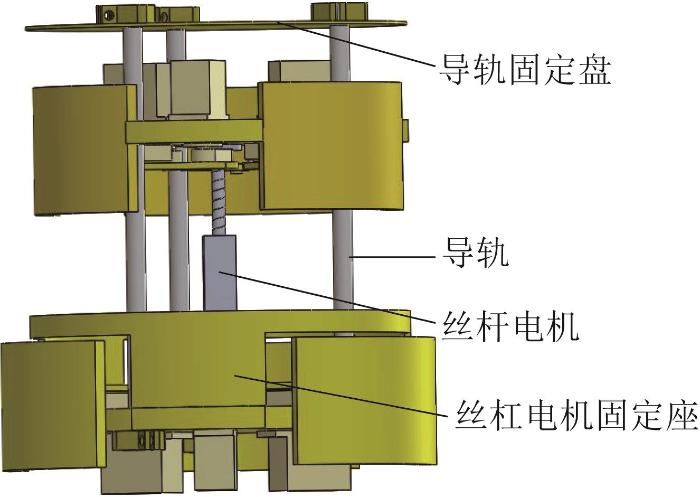
图2
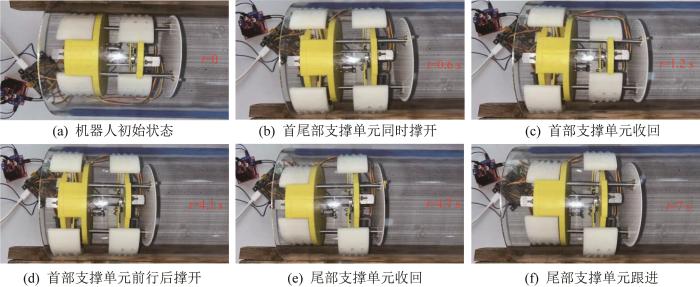
钻探机器人在井下蠕动前行1次可以细分为4个步态,如图3所示。
图3
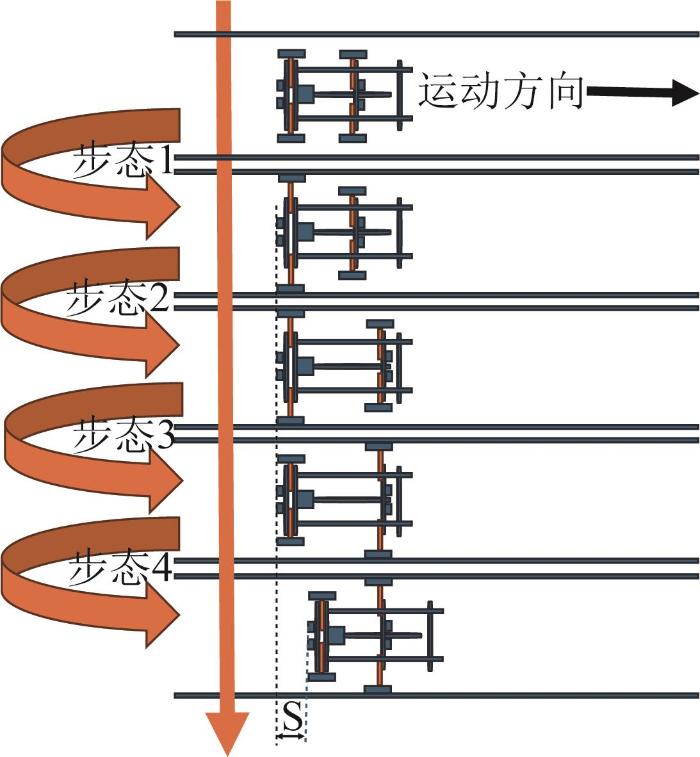
步态1:机器人尾部支撑单元收缩,首部支撑单元撑开。
步态2:丝杠电机正转,首部支撑单元前进。
步态3:首部支撑单元撑开,尾部支撑单元收缩。
步态4:丝杠电机反转,尾部支撑单元跟进。
2 钻探机器人静力学与动力学分析
2.1 静力学分析
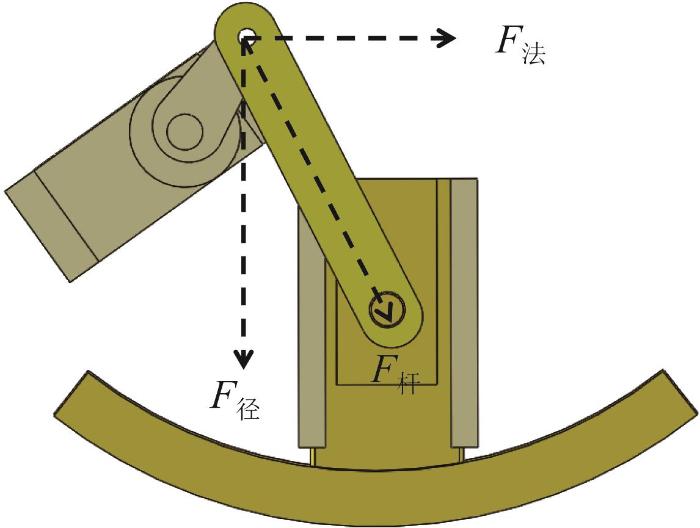
支撑结构的受力如图4所示。其中,F杆为舵机力臂作用在连杆上的力,将F杆正交分解为径向力F径和垂直于滑槽的法向力F法。
图4
设舵机的工作力矩为T舵,舵机的力臂长度为L臂,舵机力臂与连杆之间的夹角为β,滑块与滑槽之间的摩擦力为f摩,舵机传递给支撑结构前行方向的力为有效推力F有效,F杆与F径之间的夹角为θ,滑槽与滑块之间的摩擦因数μ1=0.15,受力分析后可得:
机器人轴向受力如图5所示。当机器人在装配或摆放过程中径向出现轻微不对称时,系统质心在截面上的投影将偏离几何中心,记偏离量 e=(ex, ey )。在准静态条件下,该偏心将通过力矩平衡将重力W(W=mg)的分布转化为各支撑点不均匀的法向接触力,从而引起舵机或支撑构件所受力与力矩不对称。
图5
前支撑单元在水平管道锚定完成后,其法向力满足合力及力矩平衡,即:
将
式中:(x1, y1)、(x2, y2)、(x3, y3)分别为机器人首部支撑单元的3个支撑点在管道截面坐标系中的坐标。
当矩阵 A 可逆时,求解接触力,为:
由
因此,可定义偏心灵敏度为:
该灵敏度矩阵给出了每增加单位长度偏心量时各支点法向力的线性增量,便于量化偏心影响。
2.2 刚体动力学仿真
在ADAMS软件中对机器人的运动姿态与受力进行仿真分析。机器人前行1步的仿真过程可以分为以下几个阶段:首部、尾部支撑单元同时撑开,尾部支撑单元收回且向前移动7.98 mm后撑开,首部支撑单元收回并向前移动7.98 mm。其仿真环境如图6所示。
图6
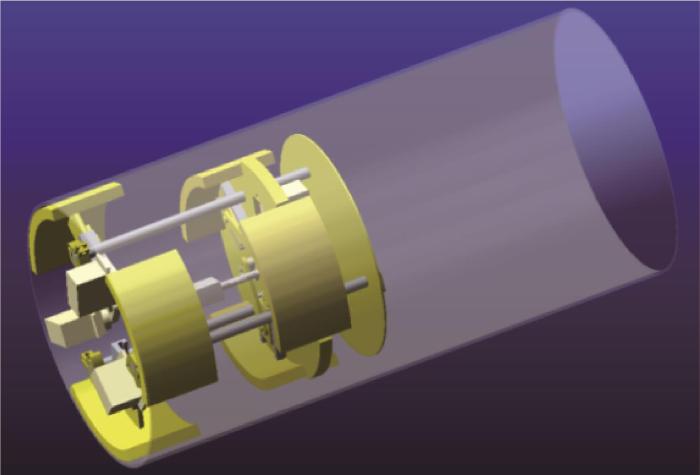
图6
机器人ADAMS仿真环境示意图
Fig.6
Schematic diagram of ADAMS simulation environment for robot
首先对撑靴添加驱动,使每个撑靴沿着滑槽以10 mm/s的速度运动至管道内壁,此时测量出每个舵机的旋转角度为53°,如图7所示。
图7
机器人主体部分的材料为ABS(丙烯腈-丁二烯-苯乙烯)共聚物,密度为1.05 g/cm3;撑靴材料为树脂,密度为1.5 g/cm3;连接导轨的材料为铝合金,密度为2.63 g/cm3。因机器人在管道内运动时撑靴与管道内壁之间存在接触刚度,可通过赫兹接触理论计算出撑靴与管道内壁的等效曲率半径,即:
式中:R* 为等效曲率半径,R1为撑靴头部半径,R2为管道内径。
撑靴与管道接触系统的等效弹性模量E* 满足:
式中:E1、ν1分别为撑靴的弹性模量和泊松比,E2、ν2分别为管道的弹性模量和泊松比。
则撑靴与管道内壁之间的接触刚度K为:
式中:R为接触处的等效半径,δ为允许的穿透深度。
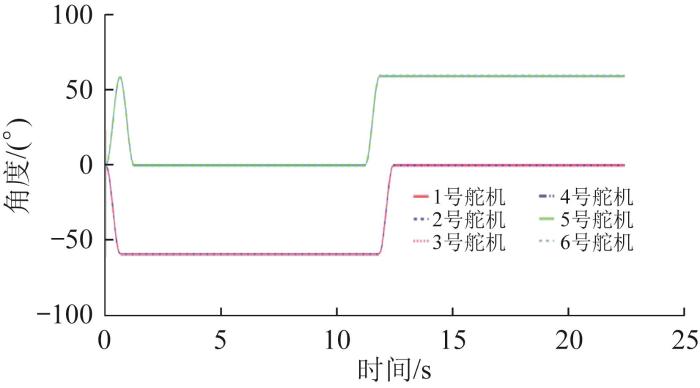
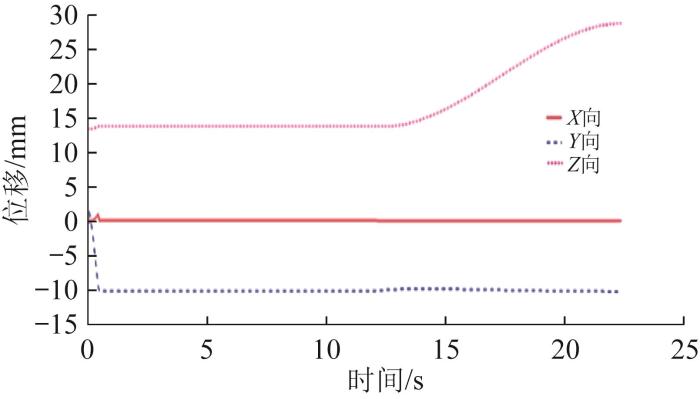
去除撑靴驱动,设置好各零部件的密度和接触刚度,滑槽与撑靴之间的摩擦力忽略不计。使舵机单独旋转53°,驱动撑靴运动至管道内壁,则机器人前行1步的过程中X、Y、Z向的位移变化如图8所示。由图可知,机器人并无明显打滑现象。
图8
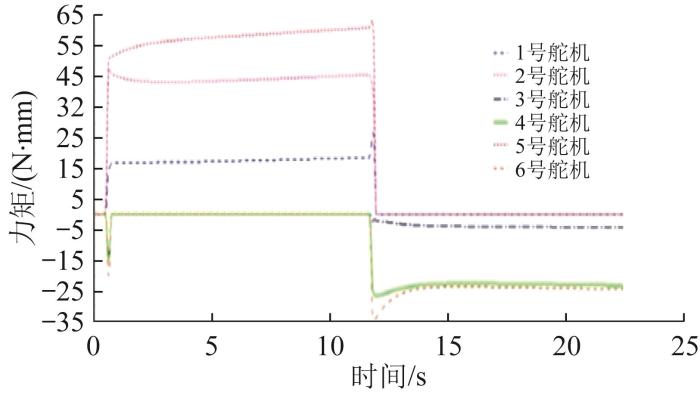
各舵机力矩的变化如图9所示。由图可知,各舵机的力矩不同,这是由动态过程、接触时序、重力偏心矩等多个因素耦合导致。影响因素中,重力偏心矩的占比较小,主要还是在初始阶段机器人最底部的撑靴无法精准地与管道相切,导致3个撑靴未能同步接触管壁,率先与管壁接触的撑靴承担了大部分与管壁的接触力。在首部、尾部支撑单元全部撑起之后,其承受冲击的支撑力转化为推进反力,力矩则略有降低。
图9
2.3 撑靴性能有限元分析
由上文刚体动力学仿真分析可知,撑靴扇形表面的最大受力为86 N,其与连杆连接的凸台约受到20 N·mm的转矩。选用表面较为光滑的树脂材料,在ANSYS软件中输入外部载荷,对撑靴表面划分网格,并进行表面等效应力计算,结果如图10所示。由图可知,撑靴表面最大等效应力为4.507×107 Pa,出现在撑靴表面与连杆连接凸台的根部区域,小于屈服力(65 MPa),安全系数为1.44。撑靴强度满足设计要求,不会发生塑性变形或结构性破坏。
图10

图10
撑靴表面等效应力云图
Fig.10
Nephogram of equivalent stress on surface of support shoe
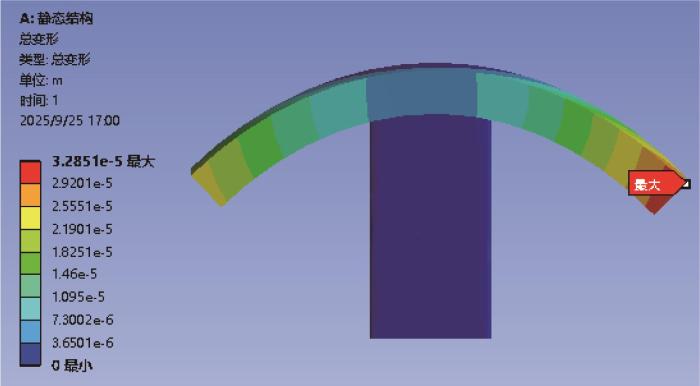
对撑靴表面的变形量进行计算,结果如图11所示。由图可知:撑靴的最大变形量为3.285×10-5 m,属于微小弹性变形范畴,发生在撑靴扇形外缘;变形从连接凸台根部向扇形外缘逐渐递增。撑靴表面的变形量在机器人运动的允许容差内,证明撑靴刚度满足设计要求,能确保支撑单元在支撑过程中的稳定性和可靠性。
图11
3 钻探机器人性能测试
3.1 舵机选型
通过刚体动力学仿真得出舵机的最大力矩为62 N·mm。本文选用2款舵机进行性能测试。一款为MG90S舵机,质量为13.6 g,工作力矩为200 N·mm,空载时电流为100~200 mA;另一款为国华金属壳大扭力数字舵机,质量为18 g,工作力矩为460 N·mm,空载时电流仅为30~50 mA。2款舵机均可以提供足够大的夹紧力。为研究舵机性能,分别用这2款舵机组装机器人。舵机性能测试平台如图12所示。
图12
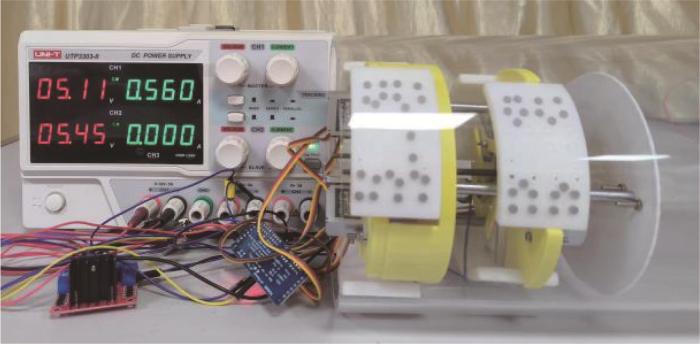
选择由直流稳压电源提供电流。机器人正常工作时,在舵机没有堵转的情况下,观察舵机在支撑单元进行支撑-伸缩运动时的电流变化。经过多次实验,得到机器人执行1个动作周期时舵机的电流变化,如图13所示。在支撑单元撑开过程中,负载(如重力、摩擦力)会随着角度的变化而改变,导致所需力矩并非恒定,舵机需实时响应这一变化,则其电流随之变化。MG90S舵机的电流变化较大,管外工作(撑靴不接触管壁)时电流达1.5 A,管内工作时最高可达2.6 A,此时电源功率不足及舵机发热严重,导致产生抖舵、响应速度慢、力矩不稳定等现象。考虑到电源模块供电功率,为避免舵机PWM(pulse width modulation,脉冲宽度调制)信号传输错乱,影响支撑结构稳定运行,最终选择国华大扭力数字舵机。
图13
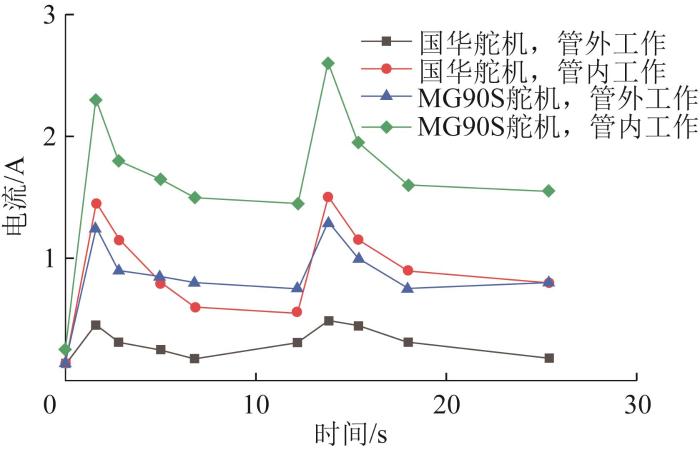
图13
机器人工作时舵机电流变化
Fig.13
Electricity variation of steering gear with robot’s working
3.2 支撑单元性能测试
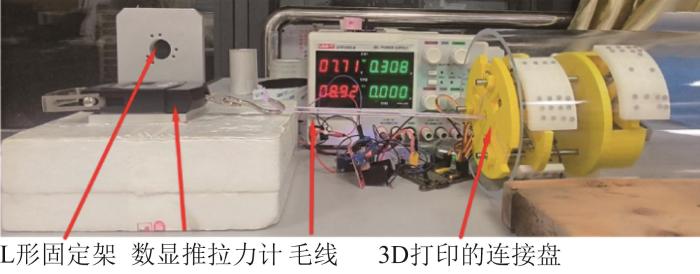
为评估机器人支撑单元在不同管道环境下的锚定性能,本研究设计并搭建了一套简易的支撑单元性能测试平台,如图14所示。该平台由直流稳压电源供电,用精度为±0.5%的数显推拉力计测量锚定力。推拉力计水平固定于L形支架上,并通过泡沫支撑盒约束,仅能作轴向直线运动。测试时,推拉力计末端的挂钩与一个通过3D打印制备的专用连接盘相连,匀速拉动推拉力计,直至机器人支撑结构在管道内发生滑移,记录此时的峰值即为该工况下的最大锚定力。在140、145、150、155 mm管径条件下各进行3次重复实验,取平均值为最终结果,以确保数据的可靠性。
图14
支撑单元最大锚定力与管道内径的关系如图15所示。由图可知,两者呈显著的负相关关系。随着管径从140 mm增大至155 mm,撑靴与管道内壁的实际接触面积递减,最大锚定力从96.4 N减小至33.6 N。在撑靴表面粘贴防滑硅胶粒以增大摩擦力,则锚定力约平均提升了35%。实验结果表明,机器人在140~150 mm管径范围内的锚定效果最为理想,能够保证在蠕动前行过程中的稳定性。
图15
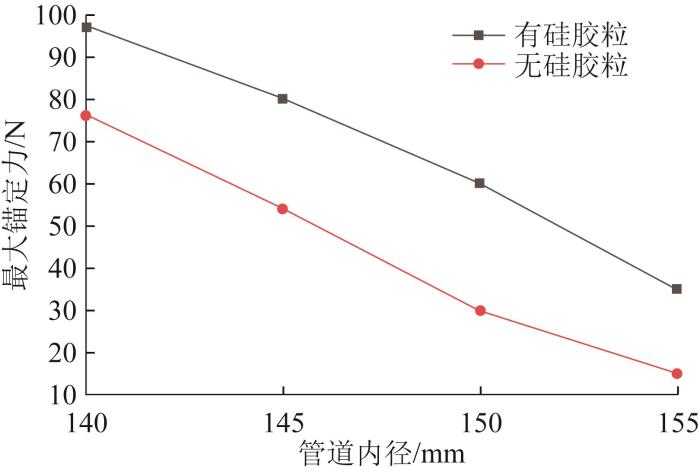
图15
支撑单元最大锚定力与管道内径的关系
Fig.15
Relationship between maximum anchoring force of support unit and inner diameter of pipe
为评估机器人对真实井下倾斜段与弯曲段的动态适应能力,需重点分析重力分量变化对其锚定稳定性的影响。在倾斜管道中,机器人所受重力可分解为法向分量(影响撑靴与管壁之间的正压力)和切向分量(引致滑移趋势)。随着倾斜角增大,切向分量增大,法向分量减小,导致锚定力减小,锚定失效风险增大。为量化倾斜工况对机器人锚定的影响,设计了多角度锚定实验。分别对内径为140、145、150、155 mm的管道设置了30°、45°、60°和90°的倾斜角,实验结果如图16所示。由图可知:倾斜角的增大显著减弱了机器人锚定性能,在60°倾斜角下,各管径下的最大锚定力较水平工况约下降50%;在垂直管道(90°倾斜角)中,锚定力进一步衰减至不足水平状态的30%。
图16
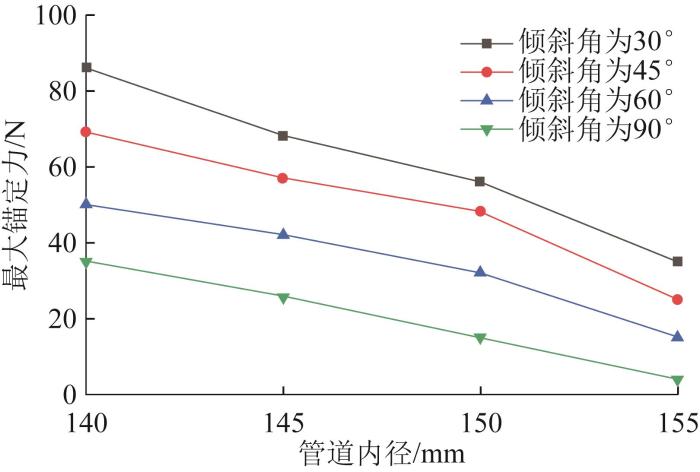
图16
支撑单元最大锚定力与管道倾斜角的关系
Fig.16
Relationship between maximum anchoring force of support unit and inclination angle of pipe
通过进一步观察发现,随着倾斜角增大,机器人重心偏移加剧,导致机体产生明显的俯仰姿态,运动轨迹出现S形偏移,尤其当倾斜角超过45°时轨迹纠偏响应迟滞现象突出。
上述实验验证了机器人重力分量对其锚定性能的影响,也揭示了单一考虑重力法向分量的锚定机制在倾斜工况下的局限性。为提升机器人对大倾角井段的适应性,需采取以下优化方法:1)通过结构设计增大撑靴与管壁之间的接触面积;2)选用大摩擦因数或具有表面纹理的材料,以增大界面摩擦力;3)可引入主动调节机制,动态调整撑靴出力,以补偿重力分量的变化。
3.3 机器人钻进速度测试
为评估直流减速电机转速和管道阻力对机器人钻进速度的影响,在140 mm内径的水平管道内,对机器人施加50~350 g的负重,并分别测试其在100、200、500 r/min电机转速下的钻进速度,结果如图17所示。由图可知:随着负重增加,机器人钻进速度呈下降趋势;在100 r/min转速下,钻进速度下降较为平缓;在200 r/min转速、350 g负重时,钻进速度最小,为21.6 mm/min;在500 r/min转速下,钻进速度下降最为显著,这是因为高转速电机在恒定功率下输出转矩较小,导致负载能力下降。
图17
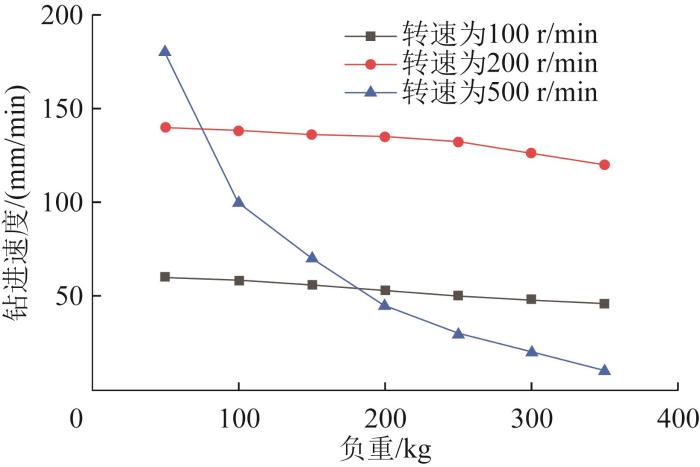
图17
机器人钻进速度与负重的关系
Fig.17
Relationship between drilling speed of robot and its load
为精准量化钻进速度的稳定性与波动性,对每个转速-负重组合下的重复实验数据进行统计分析,计算各工况下钻进速度的标准差和变异系数。在100 r/min转速下,各负重对应的钻进速度的变异系数均低于5%,且标准差范围较小,为0.8~1.7 mm/min,说明机器人在此工况下运行极稳定,速度波动轻微;在200 r/min转速下,变异系数升高至7%~10%,标准差也随着负重的增加而增大,为1.5~3.1 mm/min,表现为中等程度的波动;在500 r/min转速下,变异系数显著增至12%~18%,标准差大幅跃升,为3.8~6.4 mm/min,表明稳定性较差,速度随负重的增加出现剧烈波动。
通过以上分析进一步证实,在低转速条件下,机器人具备良好的负重钻进能力,其钻进可靠性与平稳性显著优于高转速工况。
4 钻探机器人钻进实验
为分析钻探机器人在管道内的实际钻进效果,选用内径为140 mm、长为1 m的亚克力管道,进行机器人钻进实验,如图18所示。机器人支撑单元由收缩状态变为锚定状态用时0.6 s,丝杆电机推进和收缩各用时2.3 s,完成1个前行动作的周期为7 s,前行距离为7.98 mm。机器人爬到管道另一端总共用时14.6 min,前行速度约为1.14 mm/s。实验结果表明,机器人具备良好的管内前行能力。
图18
机器人在锚定过程中需不断克服自身重力。搭建了约30°的倾斜管道实验环境,进行机器人在管道内双向运动实验,如图19所示。实验结果显示,机器人在多次双向运动后,舵机发热情况正常。
图19

图19
机器人在倾斜管道内双向运动实验
Fig.19
Bidirectional motion experiment of robot in inclined pipe
5 总 结
本研究从结构设计、仿真分析、实验验证三个层面系统开展了钻探机器人研发工作,设计了具有自主调姿能力的支撑和推进机构,开辟了基于快速原型迭代的低成本开发路径。研究成果不仅为管道机器人的设计提供了新思路,也为深地探测智能装备的研发积累了技术基础,为钻探作业的智能化、轻量化和低风险提供了技术支撑。

本文链接:https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2026.05.126
参考文献
A review on various types of in-pipe inspection robot
[J].
A comprehensive review of in-pipe robots
[J].
Adapting mechanisms for in-pipe inspection robots: a review
[J].
仿尺蠖软体机器人设计与制造
[J].
Design and manufacture of inchworm-like soft robots
[J].
Worm-inspired, untethered, soft crawling robots for pipe inspections
[J].
Development of a new multi-cavity pneumatic-driven earthworm-like soft robot
[J].
Improved rapid-expanding-random-tree-based trajectory planning on drill ARM of anchor drilling robots
[J].
Research on obstacle-avoidance trajectory planning for drill and anchor materials handling by a mechanical arm on a coal mine drilling and anchoring robot
[J].
High-precision drilling by anchor-drilling robot based on hybrid visual servo control in coal mine
[J].
Development of an in-pipe inspection robot for large-diameter water pipes
[J].
Design and development of an in-pipe mobile robot for pipeline inspection with AI defect detection system
[C]//
An earthworm-like modular soft robot for locomotion in multi-terrain environments
[J].
Improving sewer damage inspection: development of a deep learning integration concept for a multi-sensor system
[J].
Controlling a peristaltic robot inspired by inchworms
[J].
排水管道检监测技术、装备及方法综述
[J].
Review of detection and monitoring technology, equipment and methods of drainage pipeline
[J].
The state-of-the-art in pipe defect inspection with computer vision-based methods
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}