| 机器人与机构设计 |
|

|
|
|
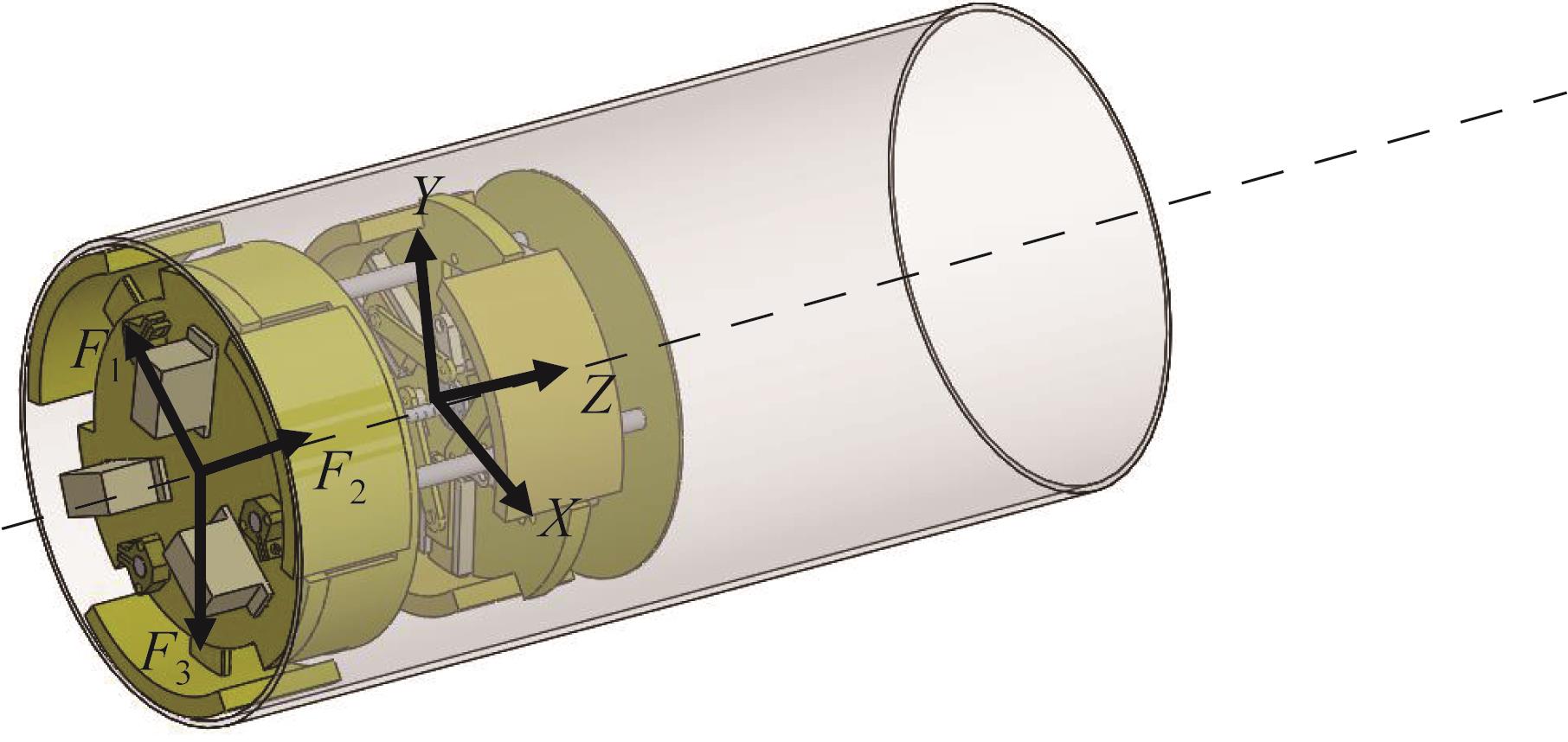
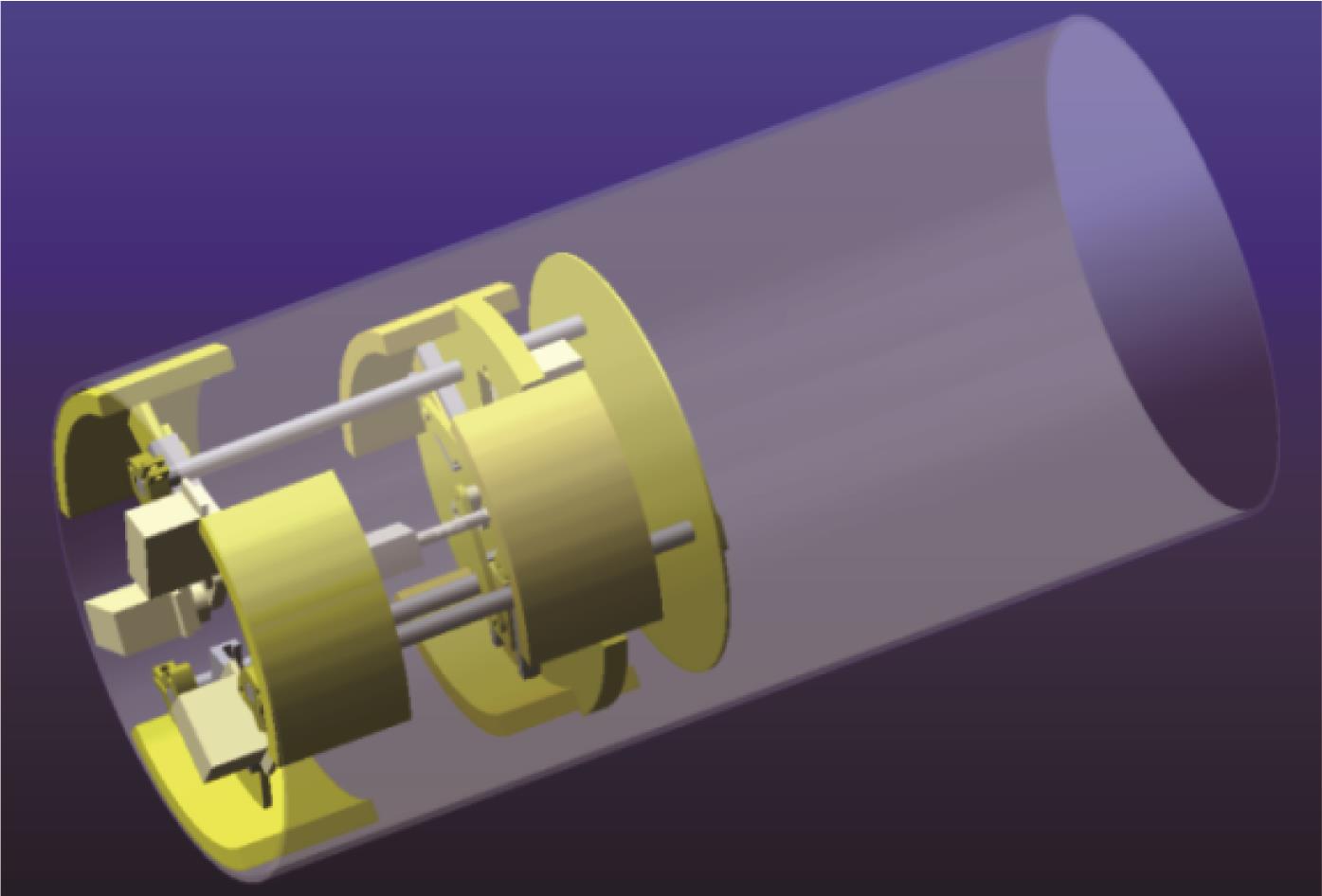
| 基于连杆-滑块支撑结构的钻探机器人设计与实验研究 |
折炜1( ),折海成2,程为彬1() ),折海成2,程为彬1() |
1.长江大学 地球物理与石油资源学院,湖北 武汉 430100
2.长江大学 城市建设学院,湖北 荆州 434023 |
|
| Design and experimental research of drilling robot based on connecting rod-slider support structure |
| Wei SHE1(),Haicheng SHE2,Weibin CHENG1() |
1.School of Geophysics and Petroleum Resources, Yangtze University, Wuhan 430100, China
2.School of Urban Construction, Yangtze University, Jingzhou 434023, China |
| [1] |
VERMA A, KAIWART A, DUBEY N D, et al. A review on various types of in-pipe inspection robot[J]. Materials Today: Proceedings, 2022, 50: 1425-1434.
|
| [2] |
KAHNAMOUEI J T, MOALLEM M. A comprehensive review of in-pipe robots[J]. Ocean Engineering, 2023, 277: 114260.
|
| [3] |
RUSU C, TATAR M O. Adapting mechanisms for in-pipe inspection robots: a review[J]. Applied Sciences, 2022, 12(12): 6191.
|
| [4] |
韩奉林, 费磊, 刘伟. 仿尺蠖软体机器人设计与制造[J]. 机械设计, 2021, 38(9): 15-20.
HAN F L, FEI L, LIU W. Design and manufacture of inchworm-like soft robots[J]. Journal of Machine Design, 2021, 38(9): 15-20.
|
| [5] |
ZHAO Y W, HUANG H R, YUAN W Z, et al. Worm-inspired, untethered, soft crawling robots for pipe inspections[J]. Soft Robotics, 2024, 11(4): 639-649.
|
| [6] |
TANG Z J, LU J Q, WANG Z, et al. Development of a new multi-cavity pneumatic-driven earthworm-like soft robot[J]. Robotica, 2020, 38(12): 2290-2304.
|
| [7] |
ZHANG X H, HUANG M Y, LEI M Y, et al. Improved rapid-expanding-random-tree-based trajectory planning on drill ARM of anchor drilling robots[J]. Machines, 2023, 11(9): 858.
|
| [8] |
SUN S Y, MAO S R, XUE X S, et al. Research on obstacle-avoidance trajectory planning for drill and anchor materials handling by a mechanical arm on a coal mine drilling and anchoring robot[J]. Sensors, 2024, 24(21): 6866.
|
| [9] |
LEI M Y, ZHANG X H, YANG W J, et al. High-precision drilling by anchor-drilling robot based on hybrid visual servo control in coal mine[J]. Mathematics, 2024, 12(13): 2059.
|
| [10] |
JEON K W, JUNG E J, BAE J H, et al. Development of an in-pipe inspection robot for large-diameter water pipes[J]. Sensors, 2024, 24(11): 3470.
|
| [11] |
KENZHEKHAN A, BAKYTZHANOVA A, OMIRBAYEV S, et al. Design and development of an in-pipe mobile robot for pipeline inspection with AI defect detection system[C]//2023 23rd International Conference on Control, Automation and Systems. IEEE, 2023: 579-584.
|
| [12] |
DAS R, BABU S P M, VISENTIN F, et al. An earthworm-like modular soft robot for locomotion in multi-terrain environments[J]. Scientific Reports, 2023, 13: 1571.
|
| [13] |
JUNG J T, REITERER A. Improving sewer damage inspection: development of a deep learning integration concept for a multi-sensor system[J]. Sensors, 2024, 24(23): 7786.
|
| [14] |
PENG Y H, NABAE H, FUNABORA Y, et al. Controlling a peristaltic robot inspired by inchworms[J]. Biomimetic Intelligence and Robotics, 2024, 4(1): 100146.
|
| [15] |
王超, 焦洋, 潘成勇, 等. 排水管道检监测技术、装备及方法综述[J]. 科技和产业, 2025, 25(23): 100-110.
WANG C, JIAO Y, PAN C Y, et al. Review of detection and monitoring technology, equipment and methods of drainage pipeline[J]. Science Technology and Industry, 2025, 25(23): 100-110.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|