基于连杆-滑块支撑结构的钻探机器人设计与实验研究
Design and experimental research of drilling robot based on connecting rod-slider support structure
基于连杆-滑块支撑结构的钻探机器人设计与实验研究 |
| 折炜,折海成,程为彬 |
|
Design and experimental research of drilling robot based on connecting rod-slider support structure |
| Wei SHE,Haicheng SHE,Weibin CHENG |
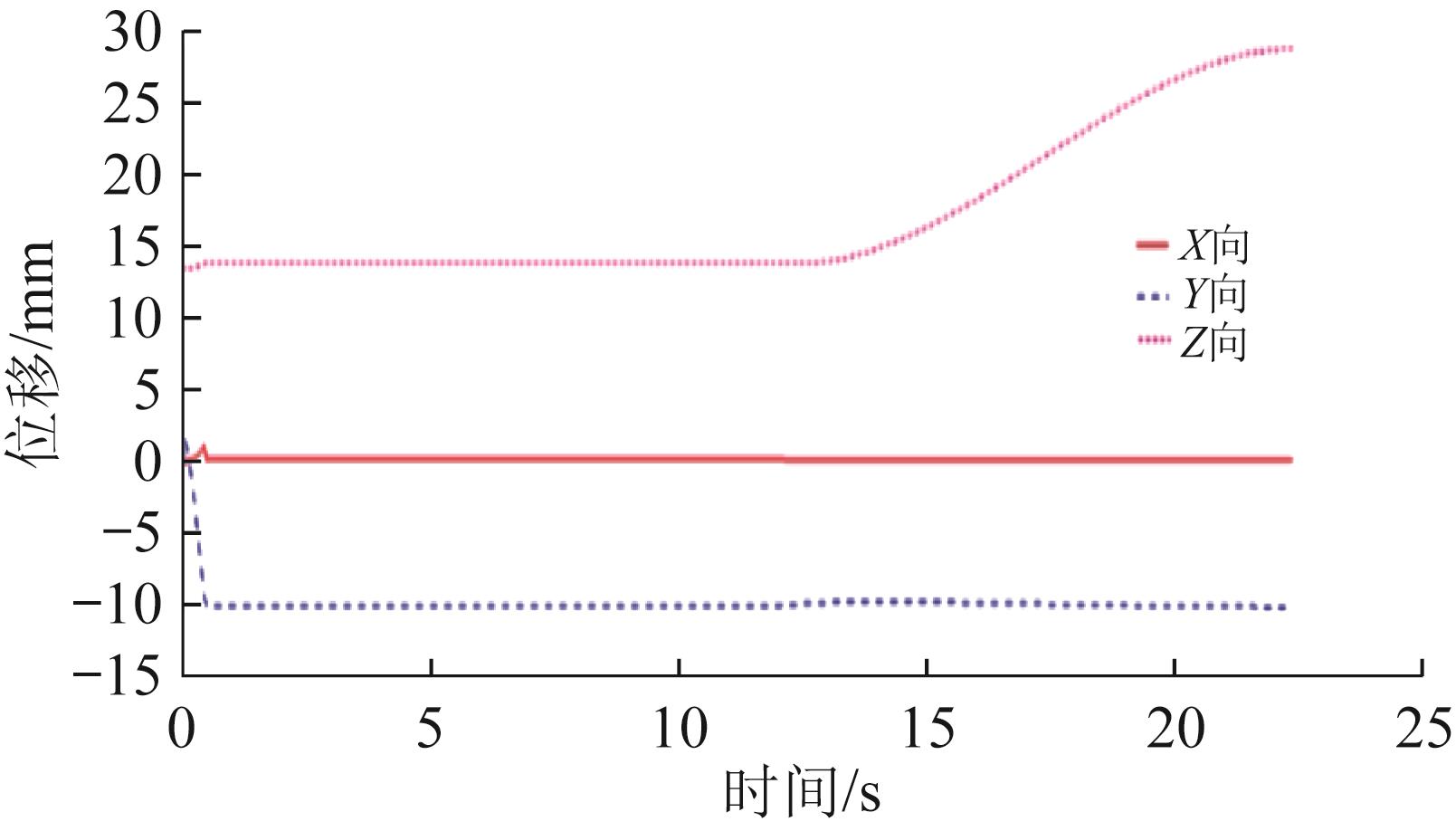
| 图8 机器人 X 、 Y 、 Z 向位移 |
| Fig.8 Displacements of robot in X, Y, Z directions |
|
|