


与传统水下机器人相比,仿生机器鱼具有效率高、机动性高及噪声低等优点。软体机器人技术的出现提升了仿生机器鱼对水下复杂环境的适应性,使得其在海洋探测领域展现出广阔的应用前景[3-4]。成巍[5]研制了一种由电机驱动的仿生机器鱼(仿生-I号),其推进速度高且仿生程度高。Xia等[6]基于折纸结构研制了液压驱动的柔性仿生机器鱼,通过将高柔性折纸结构应用于鱼尾,使得机器鱼实现了良好的直线游动性能和灵活的转弯能力。Zhong等[7-8]研制了线驱动式多关节仿生机器鱼,相较于舵机串联机构,线驱动机构的关节更多且具有更高的柔顺性,可基于鱼体波运动方程实现运动控制。Marchese等[9]研制了一款采用流体高弹性驱动器(fluidic elastomer actuators, FEAs)来实现直线驱动、C形起动、S形起动的柔性仿生机器鱼。Katzschmann等[10-11]基于鲹科鱼类的运动模式提出了液压驱动的仿生机器鱼,并在此基础上研制了一款用于深海探索的软体机器鱼。Zhu等[12]以金枪鱼为仿生对象,设计了一款驱动频率最大可达15 Hz的软体机器鱼Tunabot,该机器鱼的游动速度较快。Wang等[13]根据鱼类快速游动时高频摆动的特点,设计了一种基于电磁驱动的仿生鱼驱动关节,以实现机器鱼的高频摆动。Yang等[14]受光线启发,开发了一种由可见光驱动的柔性机器鱼。Chen等[15]设计了一款基于连续体结构的仿生张拉整体机器鱼。Wang等[16]研制了一种基于介电弹性体仿生肌肉驱动器的快速游动软体机器鱼。Nguyen等[17]提出了一种模拟鳗鱼肌肉的软体气动驱动器,并采用4对软体气动驱动器构建了仿鳗鱼机器人的本体。
折纸技术的迅速发展和新型的结构设计、驱动方式为仿生机器鱼的发展提供了新思路。凭借良好的折叠特性和大折展比等优势,折纸结构被广泛应用于机器人设计。在保留机器人自动作业等功能的基础上,结合折纸结构的折叠特性,学者们研制了各式各样的折纸机器人,提升了机器人对环境的适应性[18]。折纸结构最突出的特点是变形。折纸机器人采用的可折叠材料相比于传统机器人的材料具有质量小、价格低的优点,可在保证变形能力的同时大幅减小机器人的质量,降低成本[19]。基于此,本文结合Water Bomb折纸结构的折叠特性,设计了一款具备直线游动、主动转弯和主动变形功能的软体机器鱼。首先,对机器鱼的结构设计进行详细介绍;然后,搭建机器鱼实验平台,以对机器鱼样机进行性能测试;最后,对机器鱼在不同场景下的游动效果进行测试,以验证其结构设计的可行性。
1 软体机器鱼的结构设计
1.1 研究思路
随着折纸工程学的迅速发展,具有良好折叠特性和大折展比的折纸结构被广泛应用于多个领域。本文将折纸结构与大自然中鱼类的身体/尾鳍(body and/or caudal fin, BCF)推进模式[20]相结合,提出了一种新型的软体机器鱼,其结构如图1所示。该机器鱼的躯干部分采用Water Bomb折纸结构,利用折纸结构的折叠特性来控制躯干部分的径向变化;机器鱼的尾柄设计为双驱动关节,整体主要由软体折纸驱动器构成;机器鱼的尾部摆动与自然界中采用BCF推进模式的鱼类相似,可通过改变尾部左右两侧的摆动角度来实现前进和转弯运动。所设计的机器鱼具备在水中游动的能力,且能够利用折纸结构的折叠特性适应水下的部分狭窄通道。
图1
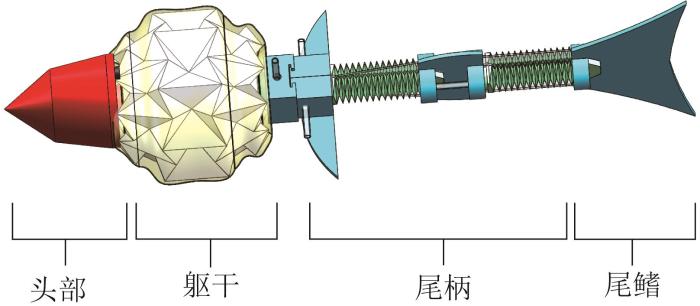
图1
基于Water Bomb折纸结构的软体机器鱼三维模型
Fig.1
Three-dimensional model of soft robotic fish based on Water Bomb origami structure
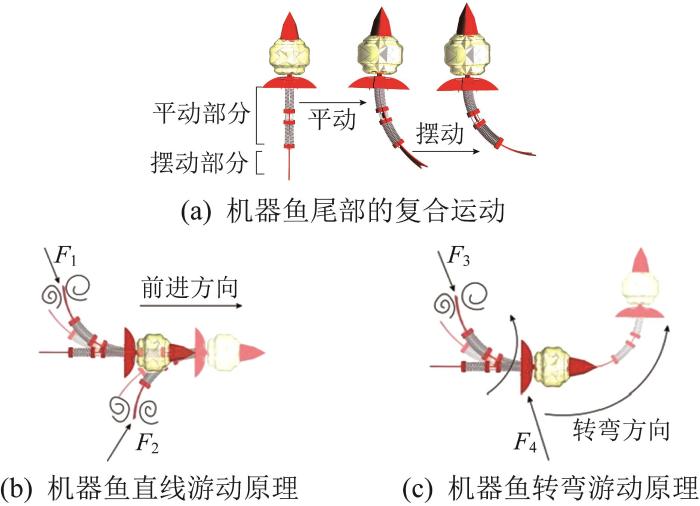
BCF推进模式是鱼类常见的游动方式之一。通过观察BCF推进型鱼类的游动姿态,发现在其游动过程中鱼尾的运动可分为平动和摆动两部分。研究表明,鱼类利用尾柄和尾鳍的复合运动产生涡流(也称卡门涡街)并形成射流,从而形成推进鱼体的动力[22]。基于这一原理,机器鱼的直线游动和转弯游动可利用尾柄平动协同尾鳍摆动产生的推动力来实现[21],如图2(a)所示。当机器鱼尾部左右两侧均匀摆动时,尾鳍处产生沿不同方向的力F1和F2,这2个力可以合成为一个沿机器鱼游动方向的合力,实现机器鱼的直线前进,如图2(b)所示。当机器鱼尾部左右两侧的摆动幅度不同时,尾鳍的一侧产生力F3,在F3与机器鱼重心处阻力F4的作用下形成合力矩M,使得机器鱼整体进行转弯运动,如图2(c)所示。
图2
1.2 结构设计
由BCF推进型机器鱼的游动原理可知,软体机器鱼尾部的摆动对其游动性能有一定的影响。在设计时,尾部驱动器的弯曲性能及末端驱动力直接影响机器鱼尾部的摆动幅度。
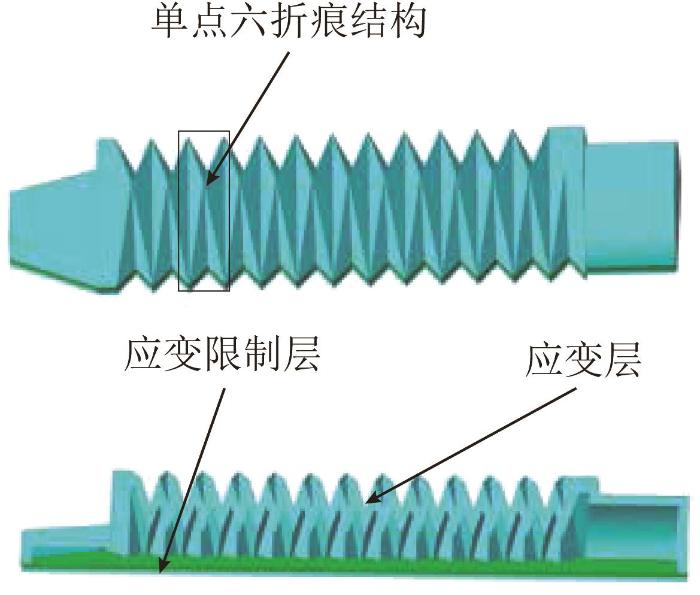
本文所设计的软体折纸驱动器的结构如图3所示,主要分为应变层和应变限制层。其中:应变层由硅胶制作而成;应变限制层由编制网(纱布)和硅胶混合制作而成。该驱动器应变层的设计基于单点六折痕结构的大折展比特性,旨在提高驱动器在弯曲过程中的轴向拉伸比。当对驱动器施加一定的驱动气压时,其会产生一定的径向膨胀,这会导致能量浪费。而采用折纸结构的应变层有效提高了轴向拉伸比,可降低整个驱动器的径向膨胀率,从而提高驱动器的弯曲效率和末端驱动力。
图3
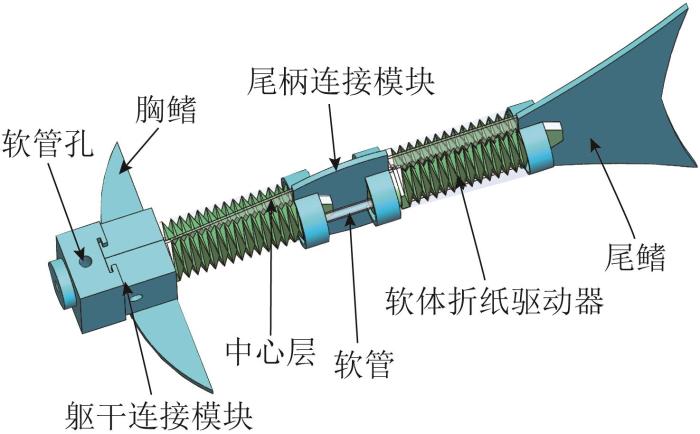
为了实现机器鱼在水中完成直线游动和转弯游动,设计了图4所示的尾部结构,其主要由躯干连接模块、胸鳍、中心层、软体折纸驱动器、尾柄连接模块、软管和尾鳍组成。其中:躯干连接模块、胸鳍和尾柄连接模块均由PLA(polylactic acid,聚乳酸)材料3D打印而成。胸鳍通过胶水固定在躯干连接模块上,用于维持机器鱼在水中的平衡。尾鳍与2个连接模块之间采用PVC(polyvinyl chloride,聚氯乙烯)硬薄片制成的中心层连接。为了更好地模拟自然界鱼类的游动,设计了双关节尾柄,以实现平动和摆动功能。将4个由硅胶制成的软体折纸驱动器分布在中心层两侧,制成双关节尾柄,同侧的驱动器通过软管相连,利用硅胶的柔顺性将驱动器嵌入尾鳍和连接模块的固定处。这种结构设计可以使机器鱼尾部在左右摆动时具有良好的柔顺性,且因受到中心层的约束,当驱动器不工作时,机器鱼的尾部处于自身中心线位置。
图4
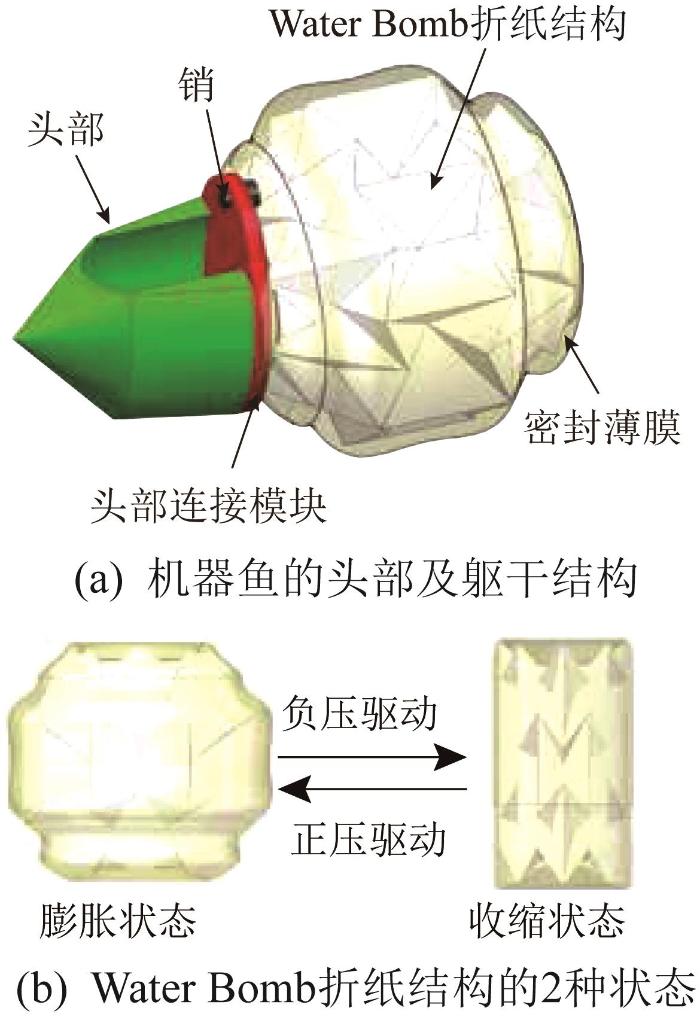
为了实现机器鱼可通过部分狭窄通道的功能,设计了图5(a)所示的机器鱼头部和躯干结构。机器鱼的头部主要由空心圆锥与头部连接模块组成,空心圆锥和头部连接模块均由PLA材料3D打印而成,两者之间采用销连接。机器鱼的头部为中空结构,可添加水中探索所需的各种微小设备。机器鱼的躯干部分由Water Bomb折纸结构和密封薄膜组成。其中,Water Bomb折纸结构采用PVC硬薄片折叠而成,使用密封薄膜将Water Bomb折纸结构密封。利用Water Bomb折纸结构在气压驱动下会变形的特性,通过施加驱动负压使Water Bomb折纸结构由膨胀状态转变为收缩状态,施加驱动正压使Water Bomb折纸结构由收缩状态转变为膨胀状态,从而实现机器鱼躯干部分的径向变化,如图5(b)所示。
图5
2 软体机器鱼样机制作与性能分析
2.1 样机与实验平台搭建
为了验证所设计的软体机器鱼的游动效果,制作和搭建了图6所示的样机与实验平台,以探究影响机器鱼游动性能的主要因素。实验平台主要由80 cm
图6
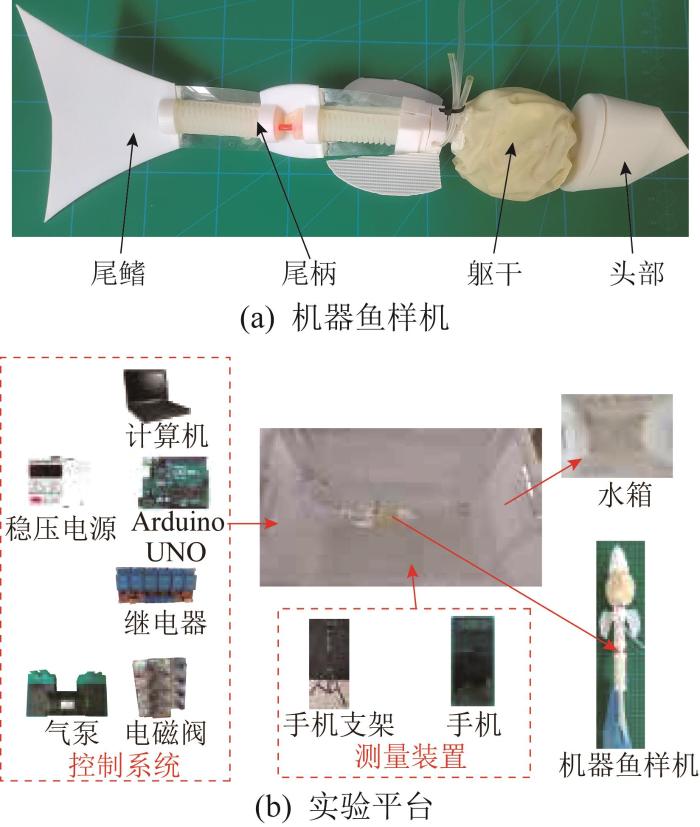
机器鱼的控制系统由计算机、Arduino UNO开发板、继电器、电磁阀、稳压电源和气泵组成。其中:气泵为动力装置,为机器鱼提供驱动气压;继电器为控制装置,用于控制六位电磁阀;电磁阀由稳压电源单独供电。控制程序由计算机编写,将编写好的控制程序导入Arduino UNO开发板,Arduino UNO开发板通过继电器控制电磁阀阀口的开关,以完成对软体折纸驱动器和Water Bomb折纸结构的操控,从而实现机器鱼的前进和转弯。在Arduino控制页面中,通过设置高低电平来实现继电器的通断,以实现软体折纸驱动器和Water Bomb折纸结构的充气与放气;通过调节PWM(pulse width modulation,脉冲宽度调制)占空比来控制软体折纸驱动器的驱动气压和驱动时间。通过编写不同的控制程序,即可实现机器鱼不同速度的直线游动和转弯游动。
实验数据由测量装置(由手机支架和手机组成)测得。在实验过程中,利用手机拍摄120 帧/s的视频,并用视频处理软件将视频处理为图像,以测量机器鱼的运动距离和转弯角度。
2.2 直线游动速度分析
由BCF推进型机器鱼的游动原理可知,影响机器鱼直线游动性能的主要因素为其尾部摆动的频率(尾部在1 s内来回摆动的次数)和幅度。其中:摆动频率与继电器的通断电频有关,摆动幅度与驱动器的驱动气压有关。
2.2.1 尾部摆动频率对直线游动速度的影响
为了探究尾部摆动频率对机器鱼直线游动速度的影响,在驱动气压为120 kPa的条件下,根据机器鱼的实际运动能力,设置了3种摆动频率,分别为1.00、0.67、0.50 Hz,每种摆动频率下均分别做3组实验,测得每组的游动速度并取平均值。不同摆动频率下机器鱼的直线游动速度如图7所示。由图7可以看出,在1.00、0.67、0.50 Hz的摆动频率下,机器鱼的平均游动速度分别为72.67、59.67、53.43 mm/s。由此可知,当尾部低频率摆动时,机器鱼的游动速度相对较慢,而当尾部高频率摆动时,游动速度较快,说明机器鱼的游动速度随尾部摆动频率的增大而提高。分析原因如下:尾部摆动越快,在相同时间内产生推力的次数越多,即对机器鱼施加作用力越频繁,则游动速度越快。因此,在满足实际运动要求的情况下,适当提高机器鱼尾部的摆动频率,可提高其游动速度。
图7
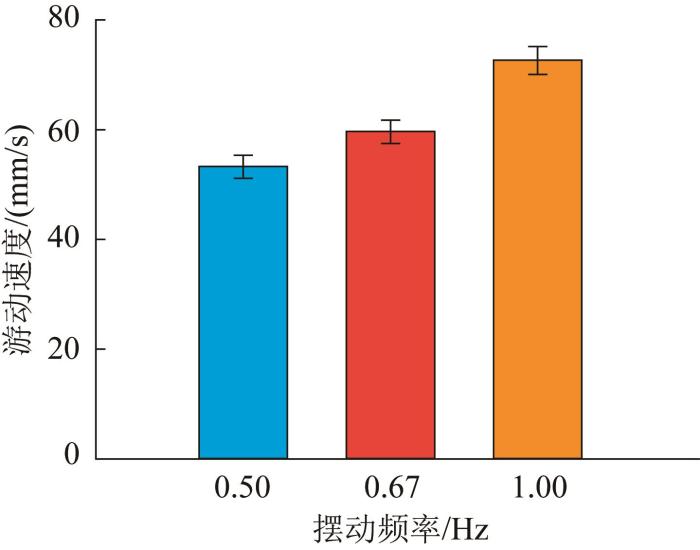
图7
不同摆动频率下机器鱼的直线游动速度
Fig.7
Straight-line swimming speed of robotic fish with different swing frequencies
2.2.2 驱动气压对直线游动速度的影响
为了探究驱动气压对机器鱼直线游动速度的影响,设置尾部摆动频率为0.67 Hz,驱动气压为40~160 kPa,以20 kPa间隔递增,每种驱动气压下分别做3组实验,测得每组的游动速度并取平均值。不同驱动气压下机器鱼的直线游动速度如图8所示。由图8可以看出,当驱动气压为160 kPa时,机器鱼的游动速度最大,为77.76 mm/s;当驱动气压为40~140 kPa时,游动速度随驱动气压的增大而提高;当驱动气压为140~160 kPa时,游动速度随驱动气压增大的变化不大。分析原因如下:当驱动气压增大时,机器鱼尾部的摆动幅度增大,而摆动幅度越大,单次摆动所产生的推力越大,故机器鱼的游动速度变快;但当驱动气压超过一定范围后,机器鱼尾部的摆动幅度达到最大值,此时再增大驱动气压对游动速度的影响不大。因此,在满足实际运动要求的情况下,适当提高驱动气压可提高机器鱼的游动速度。
图8
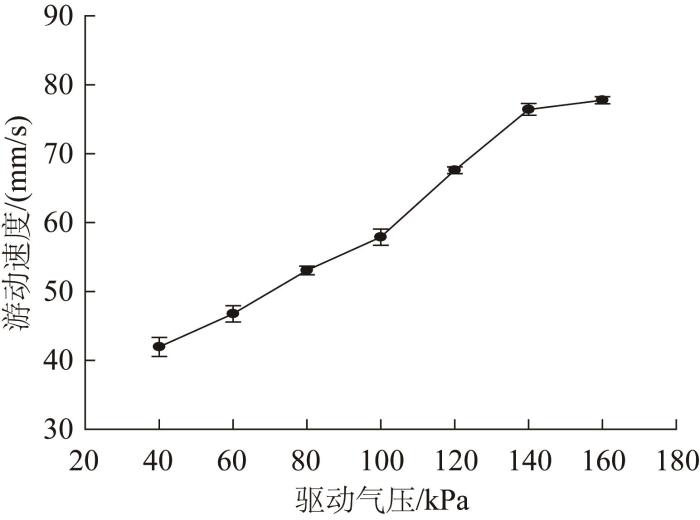
图8
不同驱动气压下机器鱼的直线游动速度
Fig.8
Straight-line swimming speed of robotic fish with different driving pressures
2.3 转弯性能分析
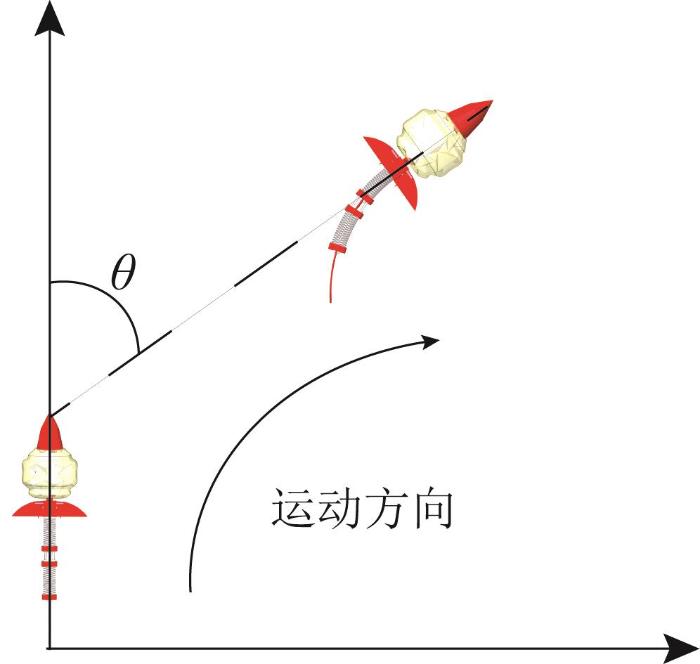
所设计的机器鱼不仅具有较快的直线游动速度,还具有灵活的转弯性能,其转弯运动示意如图9所示(θ为转弯角度,指机器鱼的初始位置与结束位置之间的夹角)。由转弯原理可知,影响机器鱼转弯性能的主要因素为尾部摆动频率和尾部左右摆动的幅度差。其中,机器鱼尾部左右摆动的幅度差与对尾部左右两侧驱动器施加的驱动气压有关。
图9
2.3.1 尾部摆动频率对转弯性能的影响
为了探究尾部摆动频率对机器鱼转弯性能的影响,开展机器鱼转弯实验。在施加相同的30 kPa驱动气压差(两侧驱动器的驱动气压之差)的情况下,分别在3种尾部摆动频率(0.33、0.50、0.67 Hz)下开展机器鱼转弯实验,每种摆动频率下均做3组实验,测得每组的转向速度并取平均值。其中,每组转弯实验均游动3个周期(机器鱼尾部左右摆动一次为一个周期,总运动时间为t),记录机器鱼的最终转弯角度θ并计算平均转向速度θ/t。不同摆动频率下机器人的转向速度如图10所示。由图10可以看出,在0.33、0.50、0.67 Hz的摆动频率下,机器鱼的平均转向速度依次为6.48、8.39、10.67 (°)/s。通过转弯实验可得,机器鱼的转向速度随尾部摆动频率的增大而提高。分析原因如下:尾部摆动频率越快,则在相同时间内产生推力的次数越多,即对机器鱼施加作用力越频繁,使得机器鱼沿单边转向的角度越大。因此,在满足实际运动要求的情况下,适当改变机器鱼尾部的摆动频率,可使其适应不同的转弯情况。
图10
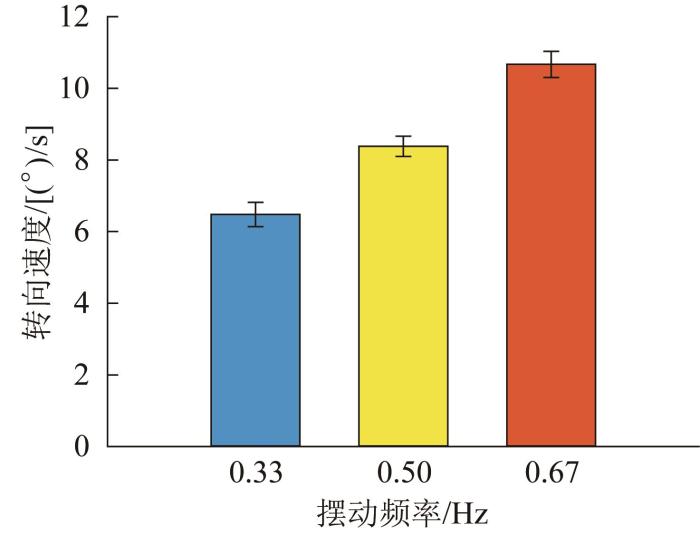
图10
不同摆动频率下机器鱼的转向速度
Fig.10
Turning speed of robotic fish with different swing frequencies
2.3.2 驱动气压差对转弯性能的影响
为了探究两侧驱动器的驱动气压差对机器鱼转弯性能的影响,在尾部摆动频率固定为0.67 Hz的条件下,在3种驱动气压差(10、20、30 kPa)下开展转弯实验,每种驱动气压差下均做3组实验,测得每组的转向速度并取平均值。同样地,每组转弯实验均游动3个周期,记录机器鱼的最终转弯角度并计算平均转向速度。不同驱动气压差下机器鱼的转向速度如图11所示。由图11可以看出,在10、20、30 kPa的驱动气压差下,机器鱼的平均转向速度依次为5.43、7.32、10.67 (°)/s。通过转弯实验可得,机器鱼的转向速度随驱动气压差的增大而提高。分析原因如下:机器鱼两侧的驱动气压差越大,则尾部两侧摆动的幅度差越大,即对机器鱼施加的单侧力越大,导致机器鱼沿单边转向的角度越大。因此,在满足实际运动要求的情况下,适当改变机器鱼两侧的驱动气压差,可使其适应不同的转弯情况。
图11
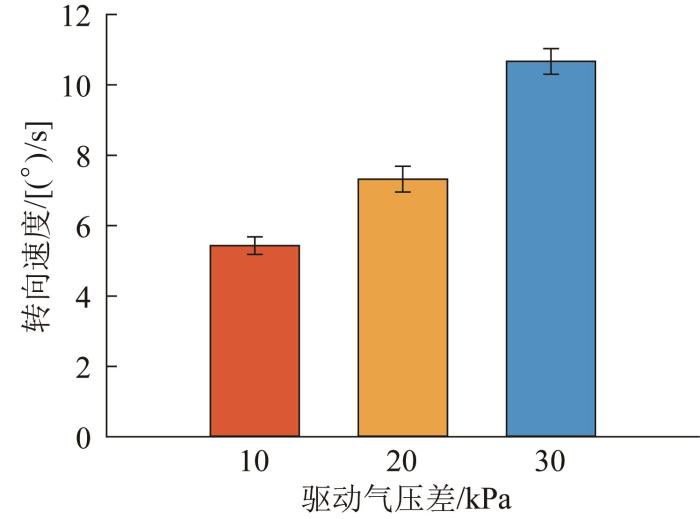
图11
不同驱动气压差下机器鱼的转向速度
Fig.11
Turning speed of robotic fish with different driving pressure differences
2.4 负载能力分析
机器鱼在水下工作时会搭载各种设备,故需具备一定的负载能力。本文所设计的机器鱼整体由Water Bomb折纸结构组成,自身质量很小,仅为209.89 g。利用排水法测得该机器鱼的体积为402.86
为了探究机器鱼的负载能力,开展机器鱼负载游动实验,设置尾部摆动频率为0.67 Hz,驱动气压为120 kPa。不同负载下机器鱼的直线游动速度如图12所示。结果表明,机器鱼的游动速度随负载的增大而降低;在负载150 g的条件下,游动速度为28.80 mm/s,机器鱼在负载接近自身3/4质量时仍能正常游动,说明其具备良好的负载能力。
图12
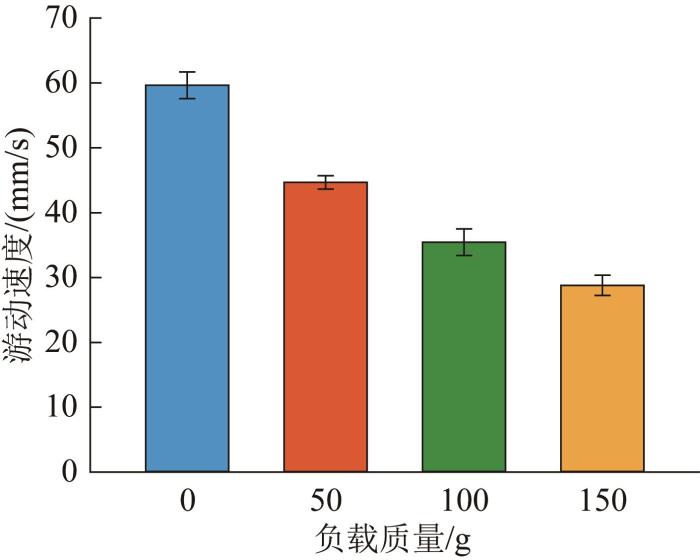
图12
不同负载下机器鱼的直线游动速度
Fig.12
Straight-line swimming speed of robotic fish with different loads
3 不同场景下的游动演示
软体机器鱼可以在三维空间中灵活运动。为了展示本文所设计的机器鱼在不同场景下的实际运动效果,设计了直线游动、转弯、避障及通过狭窄通道等实验。
选用长80 cm、宽50 cm的水箱作为实验场景,对机器鱼在水中的直线游动和转弯性能进行演示。机器鱼在水中直线游动的实验演示如图13所示(尾部摆动频率为0.67 Hz、驱动气压为120 kPa)。结果表明,在无负载条件下,机器鱼在6.0 s内从水箱的一端游动了到另一端,游动距离为358 mm。在负载150 g的条件下,机器鱼在7.5 s内游动了216 mm。
图13
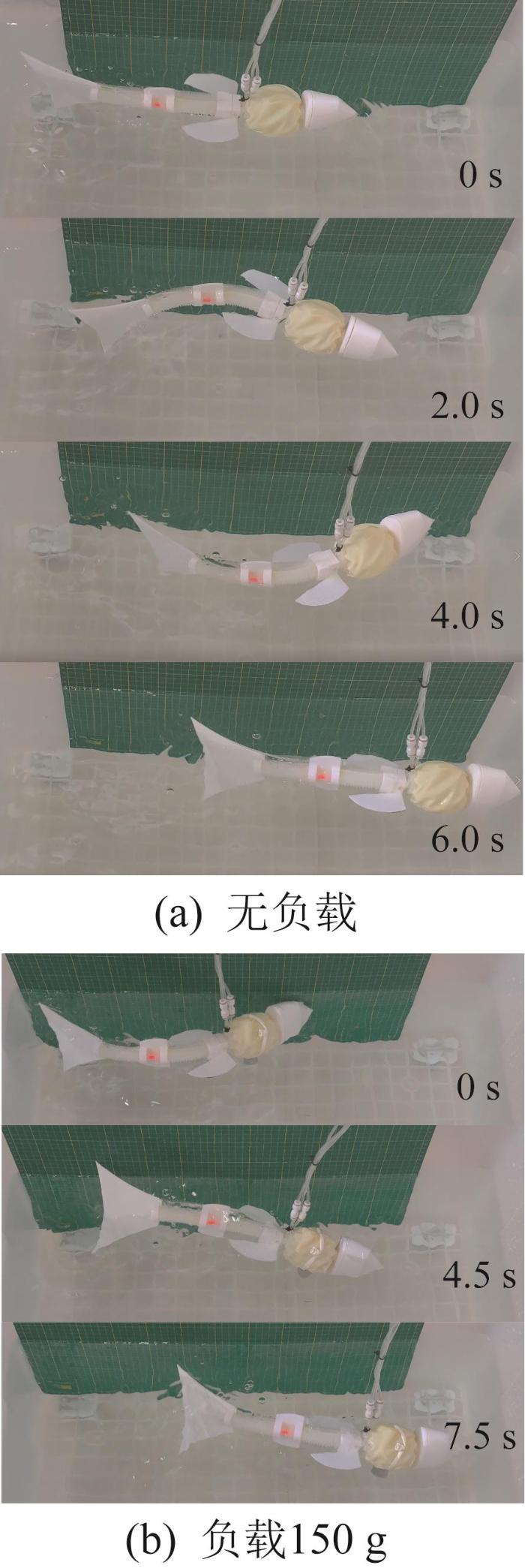
图13
机器鱼直线游动演示
Fig.13
Demonstration of robotic fish swimming in a straight line
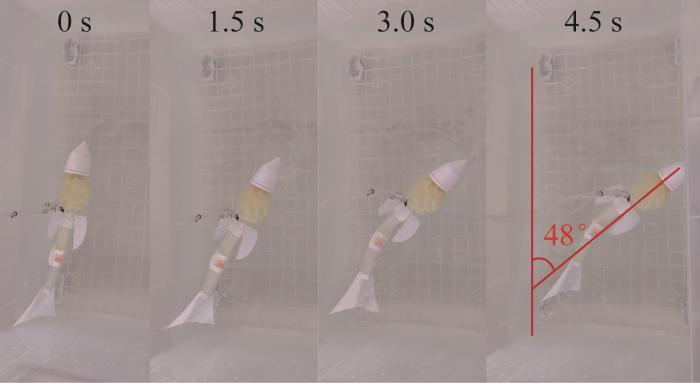
机器鱼在水中转弯的实验演示如图14所示(尾部摆动频率为0.67 Hz、驱动气压差为30 kPa)。结果显示:机器鱼完成了48°的转弯,用时4.5 s。
图14
机器鱼在水中转弯避障的实验演示如图15所示。在机器鱼前方设置一个障碍物,机器鱼向前直线游动(尾部摆动频率为0.67 Hz,驱动气压为120 kPa)时会遇到该障碍物,导致无法继续前行;当机器鱼遇到障碍后,先对机器鱼尾部左右两侧施加不同的驱动气压(驱动气压差为30 kPa),使得尾部左右摆动幅度不同,以控制机器鱼向左转弯,随后改变驱动气压以控制机器鱼向右转弯,最后控制尾部左右两侧进行相同幅度的摆动,以控制机器鱼继续向前直线游动,从而完成转弯避障。
图15
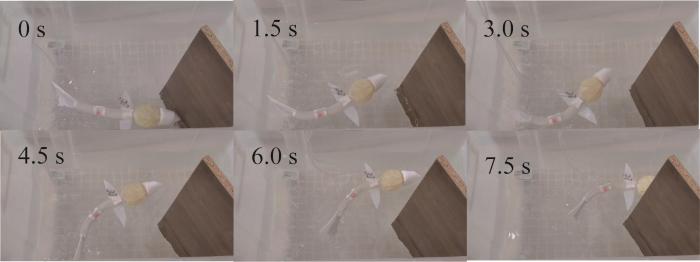
图16
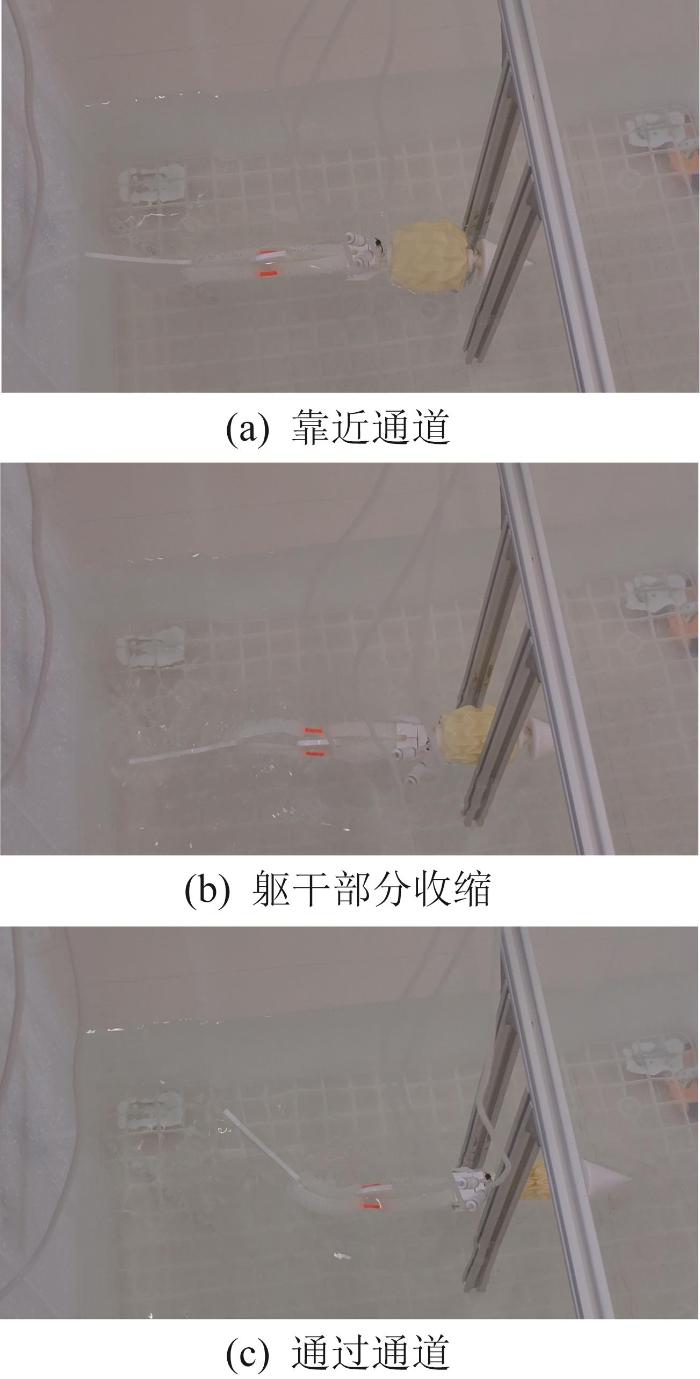
图16
机器鱼通过狭窄通道演示
Fig.16
Demonstration of robotic fish passing through narrow passage
上述实验演示说明,所设计的软体机器鱼具有良好的直行、转弯和通过狭小工作空间的能力。
4 总 结
针对现有的刚性机器鱼无法通过部分狭窄通道的问题,基于Water Bomb折纸结构设计并制作了一种在水中同时具备良好游动性能和通过狭窄通道能力的软体机器鱼,其主要由头部、躯干和尾部组成。通过实验对该机器鱼的相关性能进行了测试,并演示了机器鱼在水中直行、转弯和通过狭窄通道的游动功能。实验结果表明:所设计的机器鱼具有较快的游动速度和良好的适应性能,能够适应各种复杂的水下环境;与现有的软体机器鱼相比,该机器鱼的游动速度有所提升,其最高游动速度可达72.67 mm/s;与现有的刚性机器鱼相比,该机器鱼具有很好的自适应性能,可通过折纸结构的变形来适应复杂环境。研究结果为软体机器鱼的设计和研究提供了一种新思路。
本文所设计的机器鱼主要采用气动驱动,其控制平台的体积远大于机器鱼,导致机器鱼无法随身携带;此外,受导气管长度的影响,机器鱼难以进行远距离游动。在未来的研究中,将对机器鱼的结构进行优化设计,如尝试将控制平台集成到机器鱼上,以实现其远距离游动。
参考文献
Mechanics and control of swimming: a review
[J].
仿生机器人的研究状况及其未来发展
[J].
Biomimetic robot research and its perspective
[J].DOI:10.3321/j.issn:1002-0446.2001.05.021 [本文引用: 1]
A school of robotic fish for mariculture monitoring in the sea coast
[J].
Under water waste cleaning by mobile edge computing and intelligent image processing based robotic fish
[EB/OL]. (
仿生水下机器人仿真与控制技术研究
[D].
Research on simulation and control technology of bionic underwater robot
[D].
Research on flexible collapsible fluid-driven bionic robotic fish
[J].
A novel robot fish with wire-driven active body and compliant tail
[J].
Toward a transform method from Lighthill fish swimming model to biomimetic robot fish
[J].
Autonomous soft robotic fish capable of escape maneuvers using fluidic elastomer actuators
[J].
Hydraulic autonomous soft robotic fish for 3D swimming
[M]//
Exploration of underwater life with an acoustically controlled soft robotic fish
[J].
Tuna robotics: a high-frequency experimental platform exploring the performance space of swimming fishes
[J].
Research and experiments on electromagnetic-driven multi-joint bionic fish
[J].
A ray-inspired flexible robot fish with stable controllability actuated by photo-responsive composite hydrogels with poly(N-isopropylacrylamide) and multi-walled carbon nanotubes
[J].
Design and analysis of a novel bionic tensegrity robotic fish with a continuum body
[J].
Fast-swimming soft robotic fish actuated by bionic muscle
[J].
Anguilliform swimming performance of an eel-inspired soft robot
[J].
Towards printable robotics: origami-inspired planar fabrication of three-dimensional mechanisms
[C]//
OrigamiBot-I: a thread-actuated origami robot for manipulation and locomotion
[C]//
Review of fish swimming modes for aquatic locomotion
[J].
鱼类胸鳍推进的水动力分析与运动仿真建模
[D].
Hydrodynamic characteristics and motion simulation model construction of a pectoral-fin propeller
[D].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}