本文链接 :https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2025.04.131
大型石化装置如千万吨级炼油塔、原油战略储备库等,是国家能源产业的重大核心装备,必须进行定期的检测和维护,确保安全稳定运行[1 -2 ] 。目前,对该类特种装备的检测,主要由人工采用无损检测设备进行[3 ] ,既费时又危险。爬壁机器人能够在垂直壁面环境中进行多种高强度、高风险的工作[4 ] ,由爬壁机器人代替人工进行特种装备的检测已成为目前重要的研究方向[5 ] 。由于大型石化装备表面设有管道、盘梯、加强圈等附属设施,机器人在壁面检测时,检测路径需避开这些设施,这通常由操作人员在地面进行远程控制而实现[6 ] 。但人工遥控技术的自动化程度较低,同时壁面滑移会影响定位的准确性[7 ] 。爬壁机器人通过自身搭载的多种传感器实现定位、感知及路径规划,成为爬壁机器人领域的研究核心和热点[8 ] 。
近年来,针对爬壁机器人多传感器融合定位及导航,国内外学者进行了深入研究。如:张文等[9 ] 提出了采用机载鱼眼相机观测地面ArUco码的定位方案,并通过误差状态扩展卡尔曼滤波框架对惯性测量单元(inertial measurement unita, IMU)、编码器、鱼眼相机进行多传感器融合,来实时估计爬壁机器人的位姿;张文等[10 ] 提出了一种基于外部RGB-D深度相机和IMU的爬壁机器人定位方法,采用目标跟踪算法进行初步定位,并设计串联的扩展卡尔曼滤波器,来实现机器人定位中的姿态估计;针对爬壁机器人在立面作业时难以判断障碍物高度的问题,张小俊等[11 ] 将红外传感器、激光雷达测得的数据及超声测距数据输入支持向量机的多传感器数据融合模型,求出障碍物的准确位置,规划机器人行进速度;丁杰月等[12 ] 设计了一套罐体检测爬壁机器人控制系统,该系统在焊缝识别的基础上,采用自适应权重算法并融合位姿仪、里程计实现了机器人空间定位,弥补了传统机器人空间定位方式的不足;汪潼等[13 ] 针对立式储罐的测量需求,设计了基于激光跟踪仪的爬壁机器人路径规划方法,根据测点分布规划机器人的测量路径,从而实现了高效、高精度的容量计量。
以上对爬壁机器人的设计与研究中,机器人依赖装置壁面的外部特征进行辅助定位,而复杂多变的壁面外部特征会影响机器人的定位精度和感知能力。为了提高爬壁机器人在壁面的定位与感知能力,实现自动化检测,本文提出了一种基于多传感器融合的改进RTAB-Map(real-time appearance-based mapping,基于外观的实时建图)算法。采用扩展卡尔曼滤波(extended Kalman filter,EKF),并融合惯性传感器的数据,来获得精准的里程计信息;通过RTAB-Map算法并融合深度相机、激光雷达及里程计的数据,构建三维壁面环境地图,提高爬壁机器人的感知能力;基于融合数据优化导航算法,实现爬壁机器人在壁面的自主导航。
1 爬壁机器人组成
为了实现在垂直壁面稳定爬行,爬壁机器人需要吸附能力强、转向灵活、能适应复杂壁面的底盘结构。差速运动模型结构紧凑,运行平稳及通过性好,因此在移动机器人领域得到广泛使用[14 ] 。为了使机器人能够更好地适应复杂的壁面环境,本文基于四轮差速运动模型,设计了一款主体为永磁间隙吸附装置的爬壁机器人,实物如图1 所示。
图1
图1
爬壁机器人实物图
Fig.1
Physical diagram of wall-climbing robot
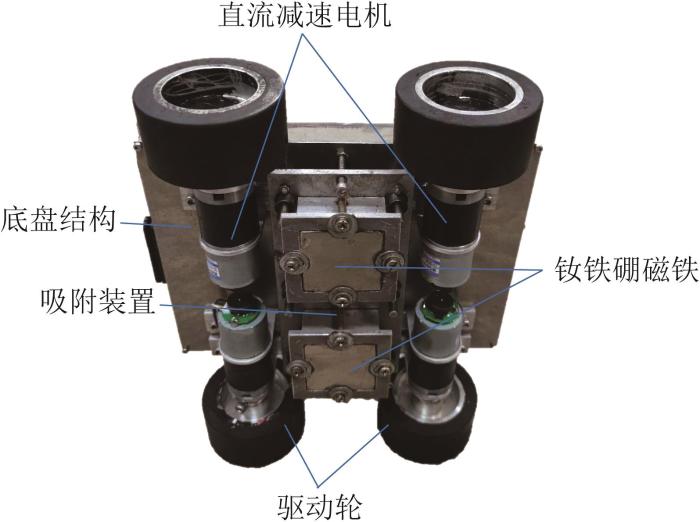
机器人的底盘结构如图2 所示。机器人通过吸附装置上的2块高磁能积的钕铁硼磁铁吸附壁面,并通过螺栓固定在升降导磁板上。调节丝杆用来控制吸附装置的升降,保证机器人在垂直壁面稳定爬行。底盘的每个驱动轮由单独的直流减速电机驱动,通过四轮差速实现机器人在垂直壁面灵活转向。机器人底盘结构的主要技术参数如表1 所示。
图2
图2
爬壁机器人底盘结构
Fig.2
Chassis structure of wall-climbing robot
爬壁机器人搭载了树莓派开发板,作为主控单元;采用基于STM32的电机控制板驱动减速电机;搭载了深度相机和单线激光雷达,作为感知模块,并结合惯性传感器来实时获取机器人的位姿信息;通过串口通信实现惯性传感器与主控单元的数据传输,确保机器人在壁面环境实现精准控制、建图以及导航等功能。
2 融合里程计算法
2.1 轮式里程计工作原理
里程计用于监测和估计机器人在运动中的位姿信息,包括移动距离和偏航角度,是实现机器人建图与导航的基础信息[15 -16 ] 。爬壁机器人通过搭载在驱动轮上的霍尔编码器获取车轮转速,结合底盘运动学模型解算出角速度ω 和线速度v 并对其积分,获得机器人相对于起始点的位置信息。用向量 P X Y θ
P • = X • Y • θ • = c o s θ - s i n θ 0 s i n θ c o s θ 0 0 0 1 ν x ν y ω z (1)
将P ˙ t 积分,得到里程计的实时信息。可以通过式(2)所示的累加运算来获得k 时刻里程计的信息。
P k = P k - 1 + P • k - 1 Δ t (2)
2.2 EKF 算法与里程计的融合
爬壁机器人在壁面爬行时,存在着灵活运动与稳定吸附之间的矛盾,其在转向时会出现滑移等状况[17 -18 ] ,使得里程计发生位置漂移,无法准确检测滑动距离[19 ] 。为了减小里程计的检测误差,采用滤波算法将编码器与IMU的数据进行融合。经典的卡尔曼滤波只适用于线性系统,而爬壁机器人的运动方程和观测方程往往是非线性的[20 ] ,因此需要将非线性系统转换成近似的线性系统,这一过程通常通过EKF来实现[21 ] 。对此,本文提出了一种融合里程计算法,即采用EKF算法对编码器和IMU的数据进行融合。
EKF算法分为预测和更新两个步骤,分别基于系统的状态模型和观测模型来实现[22 ] 。以轮式里程计模型为系统状态方程,通过编码器和IMU获取机器人的状态向量 X k
机器人的姿态通常用欧拉角表示,即俯仰角、横滚角和航向角。由于爬壁机器人主要在垂直壁面工作,俯仰角和横滚角对其运动姿态不产生影响,只需通过IMU获取机器人转向时的角速度ω ,通过积分得到偏航角,并与轮式里程计的数据进行融合,来减小爬壁机器人在转向过程中滑移导致的累计误差。在k 时刻,由IMU获得的机器人状态向量为:
X k 1 = v x k v y k ω z k (3)
机器人运动用非线性系统模型描述,在k 时刻机器人运动方程 X k Z k 式(4)所示。
X k = f ( X k - 1 ) + W k Z k = h ( X k ) + V k (4)
式中: W k k- 1到k 时刻的运动噪声, V k
X k = X k Y k θ k ν x k ν y k ω z k T (5)
X k = X k - 1 + Δ t c o s θ - Δ t s i n θ 0 Δ t s i n θ Δ t c o s θ 0 0 0 Δ t ν x k ν y k ω z k + W k (6)
利用一阶泰勒展开式将运动方程和观测方程展开为线性方程,为:
X k = f ( X ^ k - 1 ) + A ( X k - 1 - X ^ k - 1 ) + W k Z k = h ( X ^ k - ) + H ( X k - X ^ k - ) + V k (7)
式中:A = ∂ f ( x ) / ∂ x f ( x ) X k - 1 H = ∂ h ( x ) / ∂ x h ( x ) X k
预测:根据机器人在k -1时刻的后验估计位姿,对其在k 时刻的状态模型和协方差矩阵进行预测。
X ^ k = f ( X ^ k - 1 ) (8)
P k - = A P k - 1 - A T + Q k (9)
式中: P k - 为先验估计误差协方差, Q k
K k = P k - H T ( H P k - H k T + R k ) - 1 (10)
X ^ k = X ^ k - + K k ( Z k - H ( X ^ k - ) ) (11)
P k = ( I - K k H ) P k - (12)
由上可知,通过不断地预测和更新,EKF算法可以修正状态向量的先验估计,减小误差,为爬壁机器人的建图和导航提供精确的里程计信息。
3 基于多传感器融合的建图和导航
3.1 RTAB-Map 算法原理及其改进
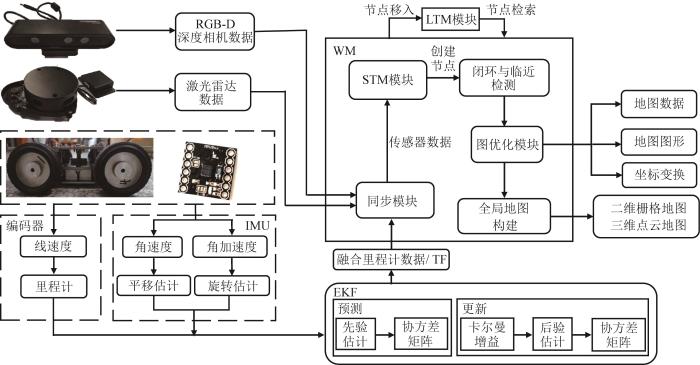
RTAB-Map是一种基于图优化的SLAM(simultaneous localization and mapping,同步定位与地图构建)算法,作为RGB-D SLAM中使用最广泛的算法之一,能够利用深度信息构建用于机器人避障、导航的三维点云地图[23 ] 。本文针对垂直壁面环境,将传统RTAB-Map算法框架中的轮式里程计数据与IMU数据相结合而作为融合里程计的输入,同时添加激光雷达,来提高爬壁机器人的位姿估计精度及感知范围。改进RTAB-Map算法的框架如图3 所示。
图3
图3
改进RTAB-Map 算法框架
Fig.3
Improved RTAB-Map algorithm framework
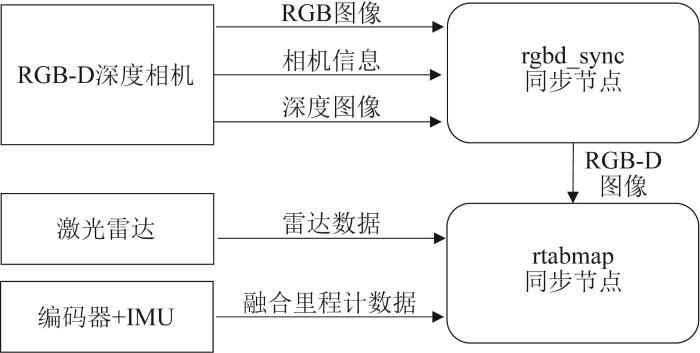
改进RTAB-Map算法的输入主要包括三部分:深度相机数据、激光雷达数据和融合里程计数据。深度相机数据采用RGB-D格式;激光雷达数据采用Laserscan格式;融合里程计数据通过单独的里程计节点输入,各个传感器坐标与机器人底盘坐标通过坐标转换(TransForm Frame,TF)软件包转换而输入系统。由于各个数据通过不同话题异步输入系统,需先由同步模块进行时间戳对齐处理。数据同步过程如图4 所示。利用rgbd_sync节点对RGB-D相机的图像和深度信息进行精确同步,使其具有相同的时间戳,对齐之后再与激光雷达数据和融合里程计信息进行近似同步,以确保不同传感器数据的一致性。
图4
图4
传感器数据同步过程
Fig.4
Sensor data synchronization process
同步后传感器数据被存储到短时记忆(short- term memory, STM)模块中。该模块主要为每帧数据创建节点并储存,同时利用激光扫描数据和深度点云等,通过TF软件包将传感器数据转换到机器人坐标系下,生成对应的二维栅格和三维点云局部地图。
里程计提供位姿估计信息以构建局部地图。基于各个节点的里程计位姿信息,将局部地图进行拼接而得到全局地图。若出现累计误差,会导致地图出现漂移及重叠等情况,因此里程计的精度对全局地图的构建尤为重要。改进RTAB-Map算法采用EKF,将轮式里程计的数据与IMU数据相融合,可减小里程计的累计误差,提高位姿估计的精度及全局地图的准确性。
此外,还需要对全局地图作进一步的闭环检测和全局优化。在RTAB-Map算法中,闭环检测通过视觉词袋模型[24 ] 和贝叶斯滤波器实现。视觉词袋模型通过计算当前位姿节点与工作内存(working memory,WM)节点之间的相似度s 来更新定位点的权重,判断该节点参与闭环检测还是移入长期记忆(long-term memory,LTM)模块。
s z t , z c = N p N z t , N z t ≥ N z c N p N z c , N z t < N z c (13)
式中:N z t N z c N p 为词对匹配数。
贝叶斯滤波用于更新候选节点相似度的概率分布情况,通过更新概率分布来选择最为可能的产生闭环检测的节点。设Lt 为当前位姿节点,将WM中所有待检测的候选节点看作一个整体, 用变量St 表示,St =i 的概率表示Lt 与Li 产生闭环的可能性。根据贝叶斯估计,概率P 的更新公式为:
P S t | L t = η P L t | S t ∑ i = 1 t n P S t | S t - 1 = i P S t - 1 = i | L (14)
式中:η L t t 时刻WM中的所有位姿节点。
当检测到闭环时,所有节点和节点约束会被送入图优化模块进行全局优化,对当前机器人里程计的全局位姿漂移进行修正。修正后节点中储存的各个局部地图就可以用于集成全局地图,生成可用于实现导航的栅格全局地图。
3.2 多传感器融合导航算法框架的构建
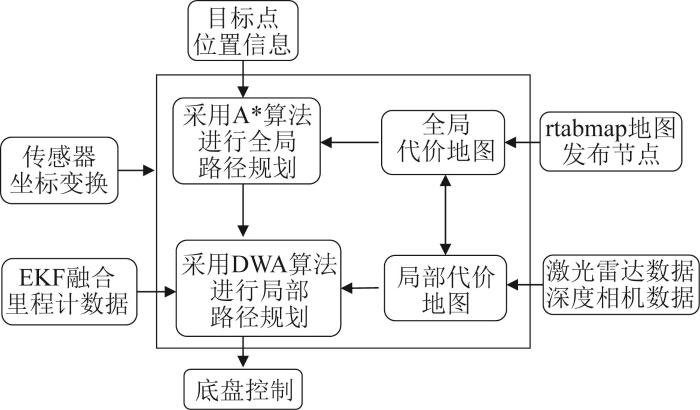
针对复杂的壁面环境特征,本文提出基于多传感器融合的爬壁机器人自主导航策略。将通过改进RTAB-Map算法构建的地图和里程计数据融入导航算法的框架,如图5 所示。通过地图和里程计数据生成代价地图,对障碍物信息进行统一度量,利用融合里程计信息进行局部定位。
图5
图5
导航算法框架
Fig.5
Navigation algorithm framework
爬壁机器人获得目标点位置后,采用启发式A*搜索算法生成全局最优路径。A*算法是基于启发函数构建代价函数,对当前节点距离起始点和目标点的代价值进行计算,并将代价值最小的节点作为最优解点,以减小搜索空间[25 ] 。启发代价函数f (n )为:
f ( n ) = g ( n ) + h ( n ) (15)
式中:代价函数g (n )表示起始点到n 点的实际代价。
g ( n ) = n ( x ) + n ( y ) (16)
式中:n (x )和n (y )分别为起始点到n 点的横向距离和纵向距离。
启发函数h (n )表示n 点到目标点的估计代价。采用Manhanttan距离作为启发函数,即代价距离值为n 点到目标点横、纵坐标之差的和:
h ( n ) = n ( x ) - g ( x ) + n ( y ) + g ( y ) (17)
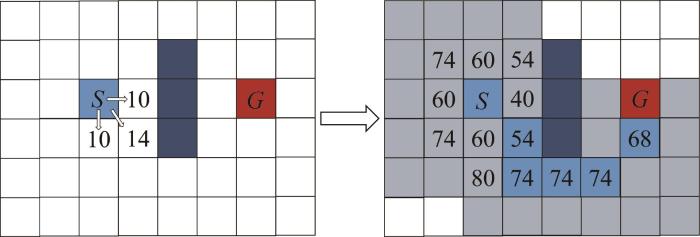
A*算法采用open和close两个集合来表示待遍历的节点与已遍历的节点。其原理如图6 所示。假设爬壁机器人需要从S 点移动到G 点进行工作,两点之间存在一定长度的障碍物,则:定义机器人横向和纵向的移动代价值为10,对角线的移动代价值则为14;从起始点S 开始并移入close集合,将S 点相邻的8个子节点移入open集合作为待遍历节点;在open集合中计算出最小移动代价值为f (n )的节点,移入close,同时将相邻子节点移入open;重复遍历,直到搜索到目标点G ,即完成路径搜索。从目标点G 开始,通过父节点反推,提取全局最优路径。
图6
图6
A* 算法原理图
Fig.6
A* algorithm schematic
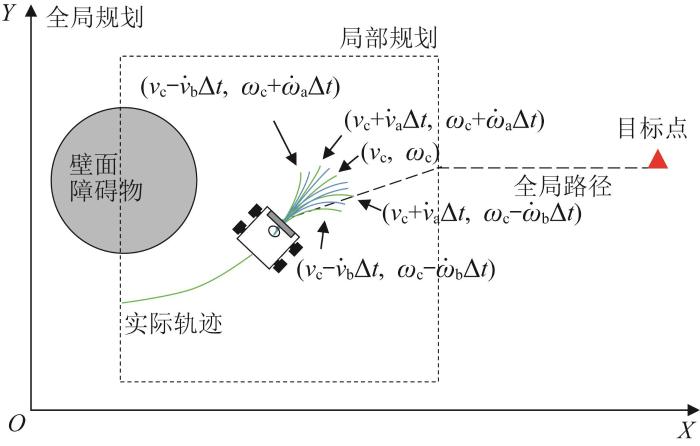
局部路径规划旨在实现对机器人速度及加速度的精准约束与控制,在全局规划所生成路径的基础上,推算出机器人的运动轨迹。动态窗口算法(dynamic window approach,DWA)通过接收全局路径信息、地图信息及里程计信息等,实时计算并输出底盘运动参数[26 ] 。爬壁机器人工作时,需要实时感知障碍物距离并调整路径,避免发生碰撞。壁面轨迹规划算法的流程如下:
1)对爬壁机器人速度空间( v , ω ) X Y θ Δ t
X t + 1 = X t + v t Δ t c o s θ t Y t + 1 = Y t + v t Δ t s i n θ t θ t + 1 = θ t + ω t Δ t (18)
2)根据机器人轨迹模型,通过速度采样推算出轨迹信息,找出最优轨迹对应的速度,从而驱动机器人运动。但是受机器人本身和环境的限制,需要将机器人速度限制在一定范围v m 内,即:
v m = { v ∈ [ v m i n , v m a x ] , w ∈ [ w m i n , w m a x ] } (19)
由于电机扭矩有限,机器人存在最大加/减速度,动态窗口内的速度范围限定了机器人在当前条件下能够达到的最大、最小速度。机器人速度v d 为:
v d = ( v , ω ) v ∈ [ v c - v ˙ b Δ t , v c + v ˙ a Δ t ] ω ∈ [ ω c - ω ˙ b Δ t , ω c + ω ˙ a Δ t ] (20)
式中:(v c , w c v ˙ a 、 v ˙ b ω ˙ a 、 ω ˙ b
为了使机器人在障碍物前停下,在最大减速度下,其速度v a 为:
v a = ( v , ω ) v ≤ 2 d ( v , ω ) v ˙ b , ω ≤ 2 d ( v , ω ) ω ˙ b (21)
式中:d ( v , ω ) ( v , ω )
3)模拟出多条路径后,通过评价函数来选择最佳运动轨迹。评价函数E 表示为:
E ( v , ω ) = σ ( α h ( v , ω ) + β c ( v , ω ) + γ s ( v , ω ) ) (22)
式中:h ( v , ω ) c ( v , ω ) s ( v , ω ) α 、 β 、 γ σ
沿着评价最优的局部路径,机器人能够更好地避开障碍物,低速安全地到达目标点。基于A*算法生成全局轨迹,通过DWA进行轨迹推算,得到最优的运动策略,在保证全局最优的同时实现局部避障。机器人壁面轨迹推算如图7 所示。
图7
图7
机器人壁面轨迹推算示意图
Fig.7
Schematic diagram of robot wall trajectory reckoning
4 实验与分析
4.1 里程计误差测试实验与分析
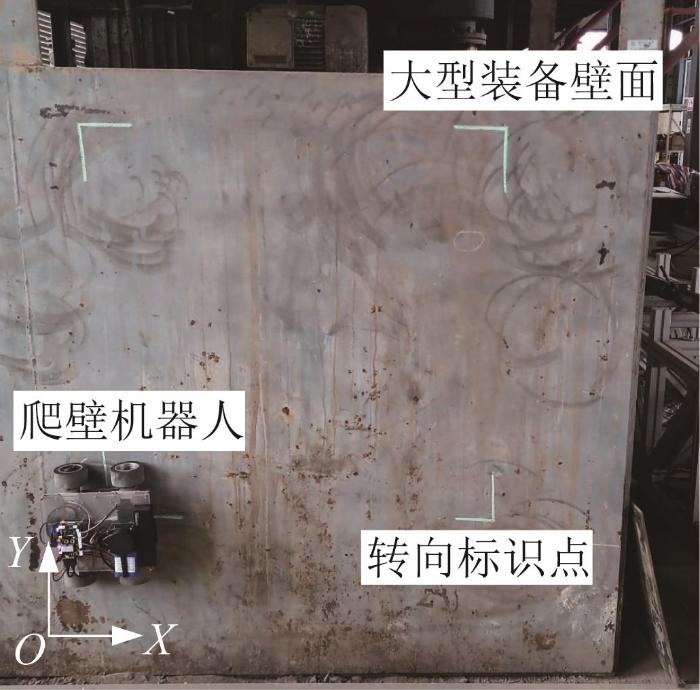
为了验证所研制的爬壁机器人的稳定性以及融合里程计的有效性,将爬壁机器人置于垂直壁面进行实验验证。控制机器人以0.12 m/s的线速度和0.35 rad/s的角速度沿边长为1 m的正方形轨迹运动,实验现场如图8 所示。
图8
图8
里程计误差测试实验现场
Fig.8
Odometer error test site
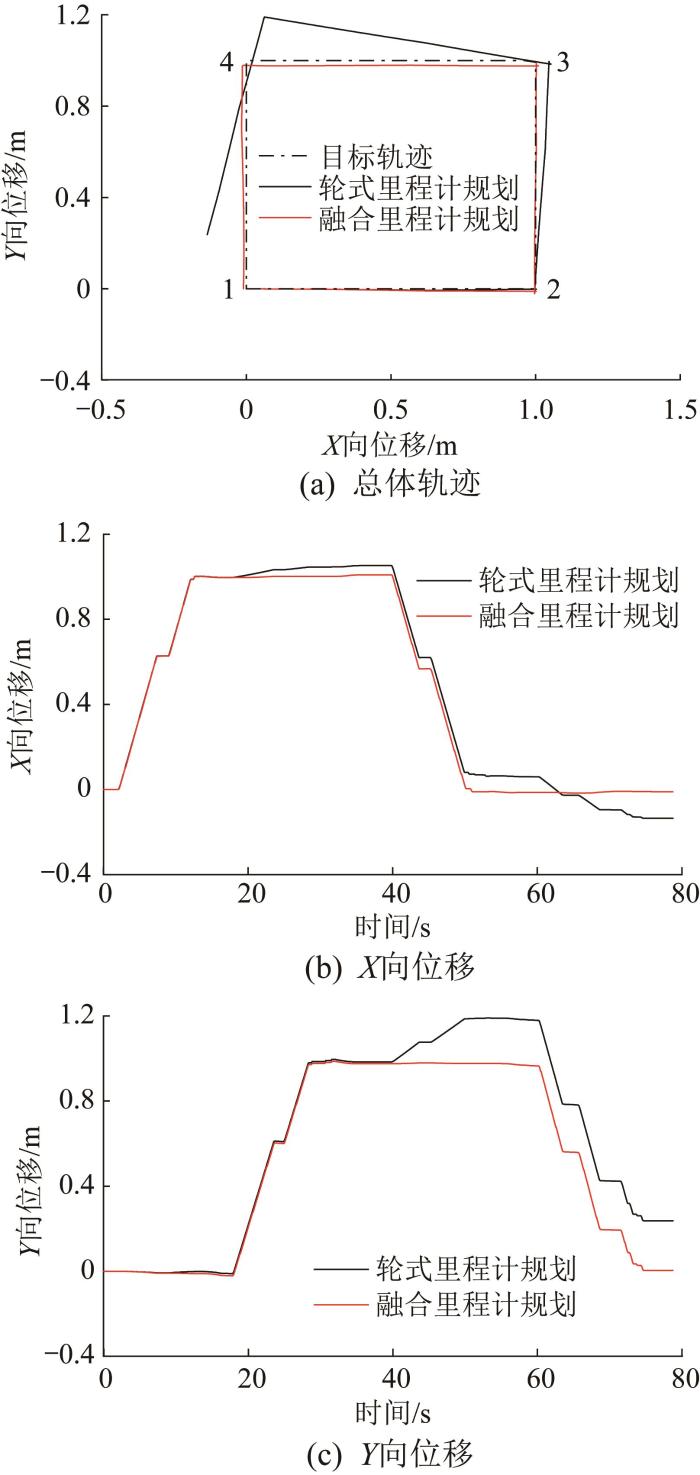
记录融合前后里程计的数据,机器人运动轨迹如图9 所示。由图(a)可知:采用融合里程计规划路径时,机器人的运动轨迹能够较好地与目标轨迹贴合;采用轮式里程计规划时,在位置2,3,4处机器人转向时,其轨迹与目标轨迹有较大偏离。由于驱动轮在壁面转向时发生打滑,采用轮式里程计规划会显著增加编码器航向角的累积误差。由图(b)和图(c)可知:采用轮式里程计时,机器人分别经过20 s和40 s后在X 向和Y 向发生位置偏移,且随着时间的推进,偏移增大;采用轮式里程计时,机器人表现稳定。
图9
图9
爬壁机器人运动轨迹
Fig.9
Movement trajectory of wall-climbing robot
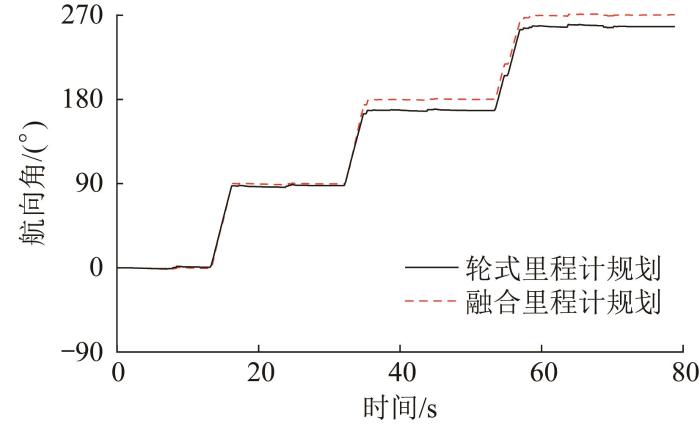
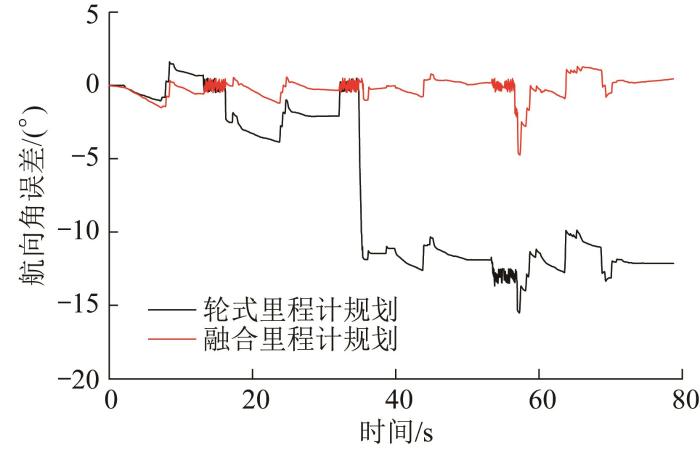
将里程计中的四元数转换为欧拉角,进一步验证融合里程计的优越性。提取到的机器人航向角如图10 所示,计算得到的航向角误差如图11 所示。由图11 可知,爬壁机器人每完成一次90°的转向,采用轮式里程计规划的航向角的累计误差逐渐增大,航向角平均误差为7.24°,最大误差超过15°;融合里程计能够实现对航向角的修正,使机器人的运动轨迹与目标轨迹的误差较小,平均误差为0.47°,最大误差不超过5°。
图10
图10
爬壁机器人航向角
Fig.10
Yaw angle of wall-climbing robot
图11
图11
爬壁机器人航向角误差
Fig.11
Yaw angle error of wall-climbing robot
为了定量分析融合里程计对机器人航向角的修正效果,重复10次图9 (a)所示1→2→3的90°转向实验,计算航向角并进行分析,结果如表2 所示。由表可知,采用轮式里程计时的航向角平均误差为7.03°,经融合里程计修正后航向角平均误差为0.78°,远小于前者,航向角误差减小了88.94%。因此采用所提出的融合里程计能够大幅提高机器人在壁面转向时的航向角测量精度和稳定性,为机器人导航提供准确的里程计信息。
4.2 导航实验与分析
为了验证所提出的改进RTAB-Map算法对壁面建图和机器人导航的效果,在某工厂的大型石化装备壁面进行实验。实验平台如图12 所示。壁面为1.6 m高、2 m宽、10 mm厚的钢制立方体泥浆罐表面,其底部有一条直径为300 mm的管道。通过电脑端遥控,控制机器人在垂直壁面运动1周。
图12
图12
机器人爬壁实验平台
Fig.12
Robot wall climbing experiment platform
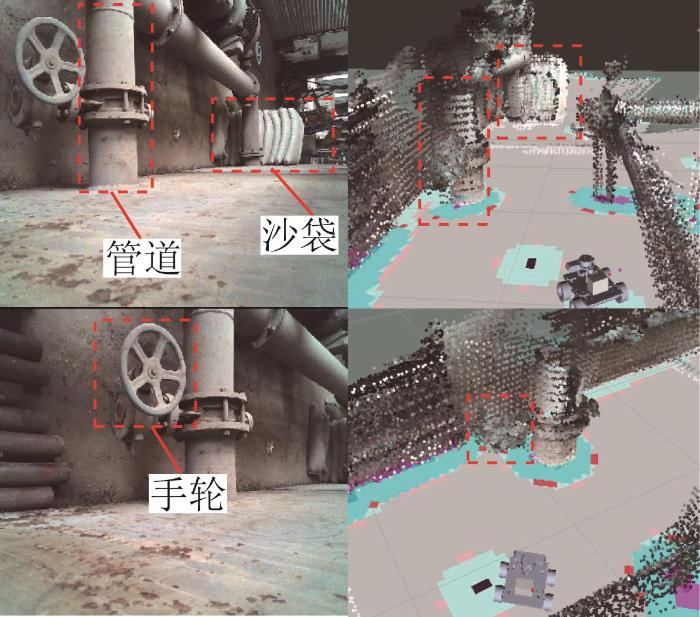
首先,构建壁面环境的二维栅格和三维点云地图,以实现机器人在壁面的全局定位。根据里程计信息及坐标变换,确定机器人所在位置。壁面环境建图效果如图13 所示。通过改进RTAB-Map算法构建的地图既包含了激光雷达的广度信息,又融合了深度相机的空间信息。
图13
图13
壁面环境建图效果
Fig.13
Wall environment mapping effect
绝大部分壁面场景在三维点云地图中得到了较好还原,如沙袋、管道及手轮等。由于相机安装位置和机器人移动范围的限制,对于管道顶部及较远位置物体的描述不够完善,但已建地图足以使机器人感知到自身运动空间中的障碍物。
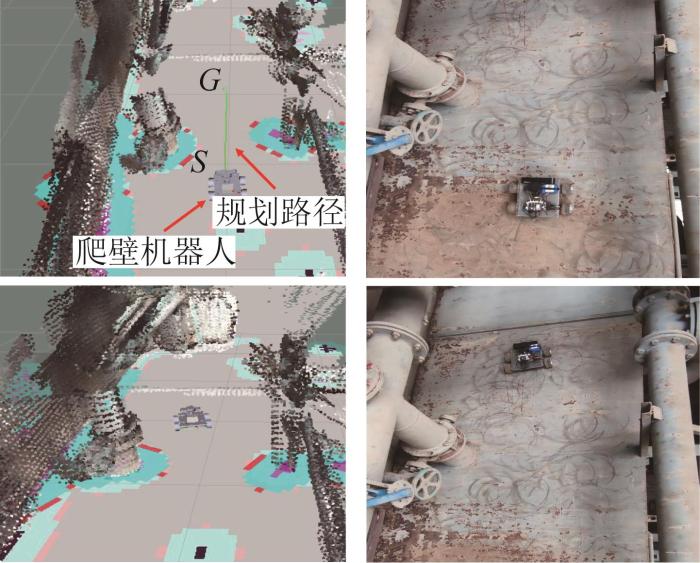
标记机器人的起始点为S ,目标点为G ,机器人需在壁面从S 点运动到G 点。壁面导航实验如图14 所示。通过A*算法在代价地图中生成了一条S 点到G 点的全局路径,DWA根据融合里程计信息求出机器人运动轨迹和运动策略,控制机器人向目标位置自主移动,最终顺利到达目标点,完成导航任务。在导航实验中,各运动学参数如表3 所示。
图14
图14
机器人壁面导航实验
Fig.14
Robot navigation experiment on wall
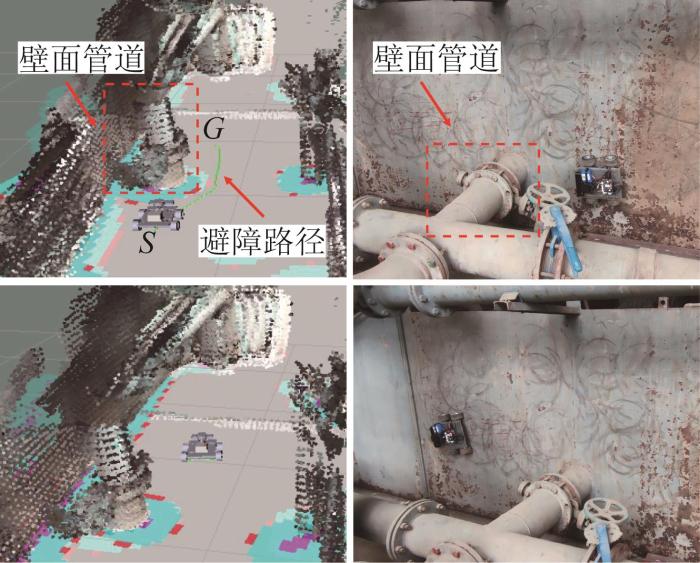
为了进一步测试爬壁机器人在壁面的避障能力,选取与壁面连接的管道作为壁面障碍物,机器人需避开管道到达目标点。壁面避障实验如图15 所示。规划的机器人运动路径为一条绕过管道的曲线,同时通过局部路径规划实时调整机器人的航向角和速度,使其跟随全局路径移动,最终安全到达目标点。
图15
图15
机器人壁面避障实验
Fig.15
Robot wall obstacle avoidance experiment
通过实验可知,爬壁机器人能够准确识别壁面障碍物,并通过全局路径规划到达所设定的目标点。因此,采用改进RTAB-Map算法并融合深度相机和激光雷达的数据,可以完整地还原壁面环境;同时,基于融合IMU的里程计能够实时反馈机器人的位姿信息,获取机器人位置,使整个导航路径更加精确。
5 结 语
为了实现大型石化装备的自动化检测,本文提出了一种壁面环境建图与爬壁机器人自主导航方法。采用EKF,并融合轮式里程计和IMU,可减小壁面滑移造成的累计误差;通过改进RTAB-Map算法,可实现对壁面环境的完整构建与机器人自主导航。经过实验,验证了所提出方法的有效性。在接下来的研究中,作者将装配无损检测装置,在更加复杂的壁面环境进行实验,来进一步验证所提方法对提高爬壁机器人自动化检测精度和稳定性的作用。
参考文献
View Option
[1]
ZHANG B Y LI H H WANG W Numerical study of dynamic response and failure analysis of spherical storage tanks under external blast loading
[J]. Journal of Loss Prevention in the Process Industries , 2015 , 34 : 209 -217 .
[本文引用: 1]
[2]
赵金龙 , 唐卿 , 黄弘 , 等 基于数值模拟的大型外浮顶储罐区定量风险评估
[J]. 清华大学学报(自然科学版) , 2015 , 55 (10 ): 1143 -1149 .
[本文引用: 1]
ZHAO J L TANG Q HUANG H et al Quantitative risk assessment of external floating roof tank areas based on the numerical simulations
[J]. Journal of Tsinghua University (Science and Technology) , 2015 , 55 (10 ): 1143 -1149 .
[本文引用: 1]
[3]
卢俊华 , 朱海飞 , 梁经伦 , 等 双足爬壁机器人三维壁面环境全局路径规划
[J]. 哈尔滨工业大学学报 , 2020 , 52 (1 ): 148 -155 .
[本文引用: 1]
LU J H ZHU H F LIANG J L et al Global path planning for a biped wall-climbing robot in 3D wall environment
[J]. Journal of Harbin Institute of Technology , 2020 , 52 (1 ): 148 -155 .
[本文引用: 1]
[4]
宋伟 , 姜红建 , 王滔 , 等 爬壁机器人磁吸附组件优化设计与试验研究
[J]. 浙江大学学报(工学版) , 2018 , 52 (10 ): 1837 -1844 .
[本文引用: 1]
SONG W JIANG H J WANG T et al Optimization design and experimental research on magnetic components for wall-climbing robot
[J]. Journal of Zhejiang University (Engineering Science) , 2018 , 52 (10 ): 1837 -1844 .
[本文引用: 1]
[5]
FANG Y WANG S BI Q S et al Design and technical development of wall-climbing robots: a review
[J]. Journal of Bionic Engineering , 2022 , 19 (4 ): 877 -901 .
[本文引用: 1]
[6]
方璇 , 刘俊锋 , 陈勇 基于SLAM的爬壁机器人自主移动研究
[J]. 制造业自动化 , 2023 , 45 (6 ): 85 -88 .
[本文引用: 1]
FANG X LIU J F CHEN Y Research on autonomous movement of the wall-climbing robot based on SLAM
[J]. Manufacturing Automation , 2023 , 45 (6 ): 85 -88 .
[本文引用: 1]
[7]
丁超 , 李刚俊 , 唐东林 储罐轮式机器人转向磁吸附力
[J]. 科学技术与工程 , 2019 , 19 (27 ): 217 -223 .
[本文引用: 1]
DING C LI G J TANG D L Dynamic magnetic adsorption force of tank wheeled robot steering
[J]. Science Technology and Engineering , 2019 , 19 (27 ): 217 -223 .
[本文引用: 1]
[8]
ZHANG X J ZHANG X ZHANG M L et al Optimization design and flexible detection method of wall-climbing robot system with multiple sensors integration for magnetic particle testing
[J]. Sensors , 2020 , 20 (16 ): 4582 .
[本文引用: 1]
[9]
张文 , 杨耀鑫 , 黄天帜 , 等 ArUco辅助的爬壁机器人自主定位方法
[J]. 机器人 , 2024 , 46 (1 ): 27 -35 , 44 .
[本文引用: 1]
ZHANG W YANG Y X HUANG T Z et al ArUco-assisted autonomous localization method for wall climbing robots
[J]. Robot , 2024 , 46 (1 ): 27 -35 , 44 .
[本文引用: 1]
[10]
张文 , 丁雨林 , 陈咏华 , 等 基于外部视觉与机载IMU组合的爬壁机器人自主定位方法
[J]. 清华大学学报(自然科学版) , 2022 , 62 (9 ): 1524 -1531 .
[本文引用: 1]
ZHANG W DING Y L CHEN Y H et al Autonomous positioning for wall climbing robots based on a combination of an external camera and a robot-mounted inertial measurement unit
[J]. Journal of Tsinghua University (Science and Technology) , 2022 , 62 (9 ): 1524 -1531 .
[本文引用: 1]
[11]
张小俊 , 刘昊学 基于数据融合的爬壁机器人控制系统设计
[J]. 传感器与微系统 , 2023 , 42 (4 ): 103 -106 .
[本文引用: 1]
ZHANG X J LIU H X Design of wall-climbing robot control system based on data fusion
[J]. Transducer and Microsystem Technologies , 2023 , 42 (4 ): 103 -106 .
[本文引用: 1]
[12]
丁杰月 , 张延兵 , 谈英姿 基于多传感器融合的爬壁机器人控制系统研究
[J]. 机械设计与制造工程 , 2018 , 47 (12 ): 57 -62 .
[本文引用: 1]
DING J Y ZHANG Y B TAN Y Z Research on the control system of wall-climbing robot based on multi-sensor fusion
[J]. Machine Design and Manufacturing Engineering , 2018 , 47 (12 ): 57 -62 .
[本文引用: 1]
[13]
汪潼 , 朱世强 , 宋伟 , 等 立式罐容量计量中爬壁机器人的路径规划
[J]. 机器人 , 2024 , 46 (1 ): 36 -44 .
[本文引用: 1]
WANG T ZHU S Q SONG W et al Path planning for wall-climbing robot in volume measurement of vertical tank
[J]. Robot , 2024 , 46 (1 ): 36 -44 .
[本文引用: 1]
[14]
[本文引用: 1]
ZHANG J WEI P WANG G C Research on location and navigation system for omnidirectional mobile robot based on ROS
[J]. Modular Machine Tool & Automatic Manufacturing Technique , 2020 (6 ): 119 -122 .
DOI:10.18178/ijmerr.9.11.1502-1508
[本文引用: 1]
[16]
郑丽丽 , 孙伟 , 刘明明 基于粒子滤波的自主移动机器人快速定位方法
[J]. 传感器与微系统 , 2020 , 39 (10 ): 31 -34 .
[本文引用: 1]
ZHENG L L SUN W LIU M M Fast localization method of autonomous mobile robots based on particle filtering
[J]. Transducer and Microsystem Technologies , 2020 , 39 (10 ): 31 -34 .
[本文引用: 1]
[17]
LIU Y H LIM B , LEE J W et al Steerable dry-adhesive linkage-type wall-climbing robot
[J]. Mechanism and Machine Theory , 2020 , 153 : 103987 .
[本文引用: 1]
[18]
LIU J F XU L S XU J J et al Analysis and optimization of the wall-climbing robot with an adsorption system and adhesive belts
[J]. International Journal of Advanced Robotic Systems , 2020 , 17 (3 ): 1729881420926409 .
[本文引用: 1]
[19]
汪建华 , 黄磊 , 石雨婷 , 等 基于优化Hector-SLAM算法的机器人自主导航系统设计
[J]. 工程设计学报 , 2023 , 30 (6 ): 678 -686 .
[本文引用: 1]
WANG J H HUANG L SHI Y T et al Design of robot autonomous navigation system based on optimized Hector-SLAM algorithm
[J]. Chinese Journal of Engineering Design , 2023 , 30 (6 ): 678 -686 .
[本文引用: 1]
[20]
LI Y Q TANG X D LI Z K et al Multi-sensor information fusion for mobile robots
[J].Journal of Northwestern Polytechnical University , 2021 ,39 (S1 ):59 -65 .
[本文引用: 1]
[21]
COLONNIER F DELLA VEDOVA L ORCHARD G ESPEE: event-based sensor pose estimation using an extended Kalman filter
[J]. Sensors , 2021 , 21 (23 ): 7840 .
[本文引用: 1]
[22]
MALLIOS A RIDAO P RIBAS D et al EKF-SLAM for AUV navigation under probabilistic sonar scan-matching
[C]//2010 IEEE/RSJ International Conference on Intelligent Robots and Systems . New York : IEEE , 2010 : 4404 -4411 .
[本文引用: 1]
[23]
LABBÉ M MICHAUD F RTAB-Map as an open-source lidar and visual simultaneous localization and mapping library for large-scale and long-term online operation
[J]. Journal of Field Robotics , 2019 , 36 (2 ): 416 -446 .
[本文引用: 1]
[24]
HUANG Z XU Z CAO Z et al Graphic information processing algorithm based on visual word-of-bag model
[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition) , 2015 , 43 : 233 -236 .
[本文引用: 1]
[25]
LIN Y Z FENG C H WANG Z X et al UAV design and control with A* algorithm
[J]. International Core Journal of Engineering , 2021 , 7 (12 ): 212 -224 .
[本文引用: 1]
[26]
CHANG L SHAN L JIANG C et al Reinforcement based mobile robot path planning with improved dynamic window approach in unknown environment
[J]. Autonomous Robots , 2021 , 45 (1 ): 51 -76 .
[本文引用: 1]
Numerical study of dynamic response and failure analysis of spherical storage tanks under external blast loading
1
2015
... 大型石化装置如千万吨级炼油塔、原油战略储备库等,是国家能源产业的重大核心装备,必须进行定期的检测和维护,确保安全稳定运行[1 -2 ] .目前,对该类特种装备的检测,主要由人工采用无损检测设备进行[3 ] ,既费时又危险.爬壁机器人能够在垂直壁面环境中进行多种高强度、高风险的工作[4 ] ,由爬壁机器人代替人工进行特种装备的检测已成为目前重要的研究方向[5 ] .由于大型石化装备表面设有管道、盘梯、加强圈等附属设施,机器人在壁面检测时,检测路径需避开这些设施,这通常由操作人员在地面进行远程控制而实现[6 ] .但人工遥控技术的自动化程度较低,同时壁面滑移会影响定位的准确性[7 ] .爬壁机器人通过自身搭载的多种传感器实现定位、感知及路径规划,成为爬壁机器人领域的研究核心和热点[8 ] . ...
基于数值模拟的大型外浮顶储罐区定量风险评估
1
2015
... 大型石化装置如千万吨级炼油塔、原油战略储备库等,是国家能源产业的重大核心装备,必须进行定期的检测和维护,确保安全稳定运行[1 -2 ] .目前,对该类特种装备的检测,主要由人工采用无损检测设备进行[3 ] ,既费时又危险.爬壁机器人能够在垂直壁面环境中进行多种高强度、高风险的工作[4 ] ,由爬壁机器人代替人工进行特种装备的检测已成为目前重要的研究方向[5 ] .由于大型石化装备表面设有管道、盘梯、加强圈等附属设施,机器人在壁面检测时,检测路径需避开这些设施,这通常由操作人员在地面进行远程控制而实现[6 ] .但人工遥控技术的自动化程度较低,同时壁面滑移会影响定位的准确性[7 ] .爬壁机器人通过自身搭载的多种传感器实现定位、感知及路径规划,成为爬壁机器人领域的研究核心和热点[8 ] . ...
基于数值模拟的大型外浮顶储罐区定量风险评估
1
2015
... 大型石化装置如千万吨级炼油塔、原油战略储备库等,是国家能源产业的重大核心装备,必须进行定期的检测和维护,确保安全稳定运行[1 -2 ] .目前,对该类特种装备的检测,主要由人工采用无损检测设备进行[3 ] ,既费时又危险.爬壁机器人能够在垂直壁面环境中进行多种高强度、高风险的工作[4 ] ,由爬壁机器人代替人工进行特种装备的检测已成为目前重要的研究方向[5 ] .由于大型石化装备表面设有管道、盘梯、加强圈等附属设施,机器人在壁面检测时,检测路径需避开这些设施,这通常由操作人员在地面进行远程控制而实现[6 ] .但人工遥控技术的自动化程度较低,同时壁面滑移会影响定位的准确性[7 ] .爬壁机器人通过自身搭载的多种传感器实现定位、感知及路径规划,成为爬壁机器人领域的研究核心和热点[8 ] . ...
双足爬壁机器人三维壁面环境全局路径规划
1
2020
... 大型石化装置如千万吨级炼油塔、原油战略储备库等,是国家能源产业的重大核心装备,必须进行定期的检测和维护,确保安全稳定运行[1 -2 ] .目前,对该类特种装备的检测,主要由人工采用无损检测设备进行[3 ] ,既费时又危险.爬壁机器人能够在垂直壁面环境中进行多种高强度、高风险的工作[4 ] ,由爬壁机器人代替人工进行特种装备的检测已成为目前重要的研究方向[5 ] .由于大型石化装备表面设有管道、盘梯、加强圈等附属设施,机器人在壁面检测时,检测路径需避开这些设施,这通常由操作人员在地面进行远程控制而实现[6 ] .但人工遥控技术的自动化程度较低,同时壁面滑移会影响定位的准确性[7 ] .爬壁机器人通过自身搭载的多种传感器实现定位、感知及路径规划,成为爬壁机器人领域的研究核心和热点[8 ] . ...
双足爬壁机器人三维壁面环境全局路径规划
1
2020
... 大型石化装置如千万吨级炼油塔、原油战略储备库等,是国家能源产业的重大核心装备,必须进行定期的检测和维护,确保安全稳定运行[1 -2 ] .目前,对该类特种装备的检测,主要由人工采用无损检测设备进行[3 ] ,既费时又危险.爬壁机器人能够在垂直壁面环境中进行多种高强度、高风险的工作[4 ] ,由爬壁机器人代替人工进行特种装备的检测已成为目前重要的研究方向[5 ] .由于大型石化装备表面设有管道、盘梯、加强圈等附属设施,机器人在壁面检测时,检测路径需避开这些设施,这通常由操作人员在地面进行远程控制而实现[6 ] .但人工遥控技术的自动化程度较低,同时壁面滑移会影响定位的准确性[7 ] .爬壁机器人通过自身搭载的多种传感器实现定位、感知及路径规划,成为爬壁机器人领域的研究核心和热点[8 ] . ...
爬壁机器人磁吸附组件优化设计与试验研究
1
2018
... 大型石化装置如千万吨级炼油塔、原油战略储备库等,是国家能源产业的重大核心装备,必须进行定期的检测和维护,确保安全稳定运行[1 -2 ] .目前,对该类特种装备的检测,主要由人工采用无损检测设备进行[3 ] ,既费时又危险.爬壁机器人能够在垂直壁面环境中进行多种高强度、高风险的工作[4 ] ,由爬壁机器人代替人工进行特种装备的检测已成为目前重要的研究方向[5 ] .由于大型石化装备表面设有管道、盘梯、加强圈等附属设施,机器人在壁面检测时,检测路径需避开这些设施,这通常由操作人员在地面进行远程控制而实现[6 ] .但人工遥控技术的自动化程度较低,同时壁面滑移会影响定位的准确性[7 ] .爬壁机器人通过自身搭载的多种传感器实现定位、感知及路径规划,成为爬壁机器人领域的研究核心和热点[8 ] . ...
爬壁机器人磁吸附组件优化设计与试验研究
1
2018
... 大型石化装置如千万吨级炼油塔、原油战略储备库等,是国家能源产业的重大核心装备,必须进行定期的检测和维护,确保安全稳定运行[1 -2 ] .目前,对该类特种装备的检测,主要由人工采用无损检测设备进行[3 ] ,既费时又危险.爬壁机器人能够在垂直壁面环境中进行多种高强度、高风险的工作[4 ] ,由爬壁机器人代替人工进行特种装备的检测已成为目前重要的研究方向[5 ] .由于大型石化装备表面设有管道、盘梯、加强圈等附属设施,机器人在壁面检测时,检测路径需避开这些设施,这通常由操作人员在地面进行远程控制而实现[6 ] .但人工遥控技术的自动化程度较低,同时壁面滑移会影响定位的准确性[7 ] .爬壁机器人通过自身搭载的多种传感器实现定位、感知及路径规划,成为爬壁机器人领域的研究核心和热点[8 ] . ...
Design and technical development of wall-climbing robots: a review
1
2022
... 大型石化装置如千万吨级炼油塔、原油战略储备库等,是国家能源产业的重大核心装备,必须进行定期的检测和维护,确保安全稳定运行[1 -2 ] .目前,对该类特种装备的检测,主要由人工采用无损检测设备进行[3 ] ,既费时又危险.爬壁机器人能够在垂直壁面环境中进行多种高强度、高风险的工作[4 ] ,由爬壁机器人代替人工进行特种装备的检测已成为目前重要的研究方向[5 ] .由于大型石化装备表面设有管道、盘梯、加强圈等附属设施,机器人在壁面检测时,检测路径需避开这些设施,这通常由操作人员在地面进行远程控制而实现[6 ] .但人工遥控技术的自动化程度较低,同时壁面滑移会影响定位的准确性[7 ] .爬壁机器人通过自身搭载的多种传感器实现定位、感知及路径规划,成为爬壁机器人领域的研究核心和热点[8 ] . ...
基于SLAM的爬壁机器人自主移动研究
1
2023
... 大型石化装置如千万吨级炼油塔、原油战略储备库等,是国家能源产业的重大核心装备,必须进行定期的检测和维护,确保安全稳定运行[1 -2 ] .目前,对该类特种装备的检测,主要由人工采用无损检测设备进行[3 ] ,既费时又危险.爬壁机器人能够在垂直壁面环境中进行多种高强度、高风险的工作[4 ] ,由爬壁机器人代替人工进行特种装备的检测已成为目前重要的研究方向[5 ] .由于大型石化装备表面设有管道、盘梯、加强圈等附属设施,机器人在壁面检测时,检测路径需避开这些设施,这通常由操作人员在地面进行远程控制而实现[6 ] .但人工遥控技术的自动化程度较低,同时壁面滑移会影响定位的准确性[7 ] .爬壁机器人通过自身搭载的多种传感器实现定位、感知及路径规划,成为爬壁机器人领域的研究核心和热点[8 ] . ...
基于SLAM的爬壁机器人自主移动研究
1
2023
... 大型石化装置如千万吨级炼油塔、原油战略储备库等,是国家能源产业的重大核心装备,必须进行定期的检测和维护,确保安全稳定运行[1 -2 ] .目前,对该类特种装备的检测,主要由人工采用无损检测设备进行[3 ] ,既费时又危险.爬壁机器人能够在垂直壁面环境中进行多种高强度、高风险的工作[4 ] ,由爬壁机器人代替人工进行特种装备的检测已成为目前重要的研究方向[5 ] .由于大型石化装备表面设有管道、盘梯、加强圈等附属设施,机器人在壁面检测时,检测路径需避开这些设施,这通常由操作人员在地面进行远程控制而实现[6 ] .但人工遥控技术的自动化程度较低,同时壁面滑移会影响定位的准确性[7 ] .爬壁机器人通过自身搭载的多种传感器实现定位、感知及路径规划,成为爬壁机器人领域的研究核心和热点[8 ] . ...
储罐轮式机器人转向磁吸附力
1
2019
... 大型石化装置如千万吨级炼油塔、原油战略储备库等,是国家能源产业的重大核心装备,必须进行定期的检测和维护,确保安全稳定运行[1 -2 ] .目前,对该类特种装备的检测,主要由人工采用无损检测设备进行[3 ] ,既费时又危险.爬壁机器人能够在垂直壁面环境中进行多种高强度、高风险的工作[4 ] ,由爬壁机器人代替人工进行特种装备的检测已成为目前重要的研究方向[5 ] .由于大型石化装备表面设有管道、盘梯、加强圈等附属设施,机器人在壁面检测时,检测路径需避开这些设施,这通常由操作人员在地面进行远程控制而实现[6 ] .但人工遥控技术的自动化程度较低,同时壁面滑移会影响定位的准确性[7 ] .爬壁机器人通过自身搭载的多种传感器实现定位、感知及路径规划,成为爬壁机器人领域的研究核心和热点[8 ] . ...
储罐轮式机器人转向磁吸附力
1
2019
... 大型石化装置如千万吨级炼油塔、原油战略储备库等,是国家能源产业的重大核心装备,必须进行定期的检测和维护,确保安全稳定运行[1 -2 ] .目前,对该类特种装备的检测,主要由人工采用无损检测设备进行[3 ] ,既费时又危险.爬壁机器人能够在垂直壁面环境中进行多种高强度、高风险的工作[4 ] ,由爬壁机器人代替人工进行特种装备的检测已成为目前重要的研究方向[5 ] .由于大型石化装备表面设有管道、盘梯、加强圈等附属设施,机器人在壁面检测时,检测路径需避开这些设施,这通常由操作人员在地面进行远程控制而实现[6 ] .但人工遥控技术的自动化程度较低,同时壁面滑移会影响定位的准确性[7 ] .爬壁机器人通过自身搭载的多种传感器实现定位、感知及路径规划,成为爬壁机器人领域的研究核心和热点[8 ] . ...
Optimization design and flexible detection method of wall-climbing robot system with multiple sensors integration for magnetic particle testing
1
2020
... 大型石化装置如千万吨级炼油塔、原油战略储备库等,是国家能源产业的重大核心装备,必须进行定期的检测和维护,确保安全稳定运行[1 -2 ] .目前,对该类特种装备的检测,主要由人工采用无损检测设备进行[3 ] ,既费时又危险.爬壁机器人能够在垂直壁面环境中进行多种高强度、高风险的工作[4 ] ,由爬壁机器人代替人工进行特种装备的检测已成为目前重要的研究方向[5 ] .由于大型石化装备表面设有管道、盘梯、加强圈等附属设施,机器人在壁面检测时,检测路径需避开这些设施,这通常由操作人员在地面进行远程控制而实现[6 ] .但人工遥控技术的自动化程度较低,同时壁面滑移会影响定位的准确性[7 ] .爬壁机器人通过自身搭载的多种传感器实现定位、感知及路径规划,成为爬壁机器人领域的研究核心和热点[8 ] . ...
ArUco辅助的爬壁机器人自主定位方法
1
2024
... 近年来,针对爬壁机器人多传感器融合定位及导航,国内外学者进行了深入研究.如:张文等[9 ] 提出了采用机载鱼眼相机观测地面ArUco码的定位方案,并通过误差状态扩展卡尔曼滤波框架对惯性测量单元(inertial measurement unita, IMU)、编码器、鱼眼相机进行多传感器融合,来实时估计爬壁机器人的位姿;张文等[10 ] 提出了一种基于外部RGB-D深度相机和IMU的爬壁机器人定位方法,采用目标跟踪算法进行初步定位,并设计串联的扩展卡尔曼滤波器,来实现机器人定位中的姿态估计;针对爬壁机器人在立面作业时难以判断障碍物高度的问题,张小俊等[11 ] 将红外传感器、激光雷达测得的数据及超声测距数据输入支持向量机的多传感器数据融合模型,求出障碍物的准确位置,规划机器人行进速度;丁杰月等[12 ] 设计了一套罐体检测爬壁机器人控制系统,该系统在焊缝识别的基础上,采用自适应权重算法并融合位姿仪、里程计实现了机器人空间定位,弥补了传统机器人空间定位方式的不足;汪潼等[13 ] 针对立式储罐的测量需求,设计了基于激光跟踪仪的爬壁机器人路径规划方法,根据测点分布规划机器人的测量路径,从而实现了高效、高精度的容量计量. ...
ArUco辅助的爬壁机器人自主定位方法
1
2024
... 近年来,针对爬壁机器人多传感器融合定位及导航,国内外学者进行了深入研究.如:张文等[9 ] 提出了采用机载鱼眼相机观测地面ArUco码的定位方案,并通过误差状态扩展卡尔曼滤波框架对惯性测量单元(inertial measurement unita, IMU)、编码器、鱼眼相机进行多传感器融合,来实时估计爬壁机器人的位姿;张文等[10 ] 提出了一种基于外部RGB-D深度相机和IMU的爬壁机器人定位方法,采用目标跟踪算法进行初步定位,并设计串联的扩展卡尔曼滤波器,来实现机器人定位中的姿态估计;针对爬壁机器人在立面作业时难以判断障碍物高度的问题,张小俊等[11 ] 将红外传感器、激光雷达测得的数据及超声测距数据输入支持向量机的多传感器数据融合模型,求出障碍物的准确位置,规划机器人行进速度;丁杰月等[12 ] 设计了一套罐体检测爬壁机器人控制系统,该系统在焊缝识别的基础上,采用自适应权重算法并融合位姿仪、里程计实现了机器人空间定位,弥补了传统机器人空间定位方式的不足;汪潼等[13 ] 针对立式储罐的测量需求,设计了基于激光跟踪仪的爬壁机器人路径规划方法,根据测点分布规划机器人的测量路径,从而实现了高效、高精度的容量计量. ...
基于外部视觉与机载IMU组合的爬壁机器人自主定位方法
1
2022
... 近年来,针对爬壁机器人多传感器融合定位及导航,国内外学者进行了深入研究.如:张文等[9 ] 提出了采用机载鱼眼相机观测地面ArUco码的定位方案,并通过误差状态扩展卡尔曼滤波框架对惯性测量单元(inertial measurement unita, IMU)、编码器、鱼眼相机进行多传感器融合,来实时估计爬壁机器人的位姿;张文等[10 ] 提出了一种基于外部RGB-D深度相机和IMU的爬壁机器人定位方法,采用目标跟踪算法进行初步定位,并设计串联的扩展卡尔曼滤波器,来实现机器人定位中的姿态估计;针对爬壁机器人在立面作业时难以判断障碍物高度的问题,张小俊等[11 ] 将红外传感器、激光雷达测得的数据及超声测距数据输入支持向量机的多传感器数据融合模型,求出障碍物的准确位置,规划机器人行进速度;丁杰月等[12 ] 设计了一套罐体检测爬壁机器人控制系统,该系统在焊缝识别的基础上,采用自适应权重算法并融合位姿仪、里程计实现了机器人空间定位,弥补了传统机器人空间定位方式的不足;汪潼等[13 ] 针对立式储罐的测量需求,设计了基于激光跟踪仪的爬壁机器人路径规划方法,根据测点分布规划机器人的测量路径,从而实现了高效、高精度的容量计量. ...
基于外部视觉与机载IMU组合的爬壁机器人自主定位方法
1
2022
... 近年来,针对爬壁机器人多传感器融合定位及导航,国内外学者进行了深入研究.如:张文等[9 ] 提出了采用机载鱼眼相机观测地面ArUco码的定位方案,并通过误差状态扩展卡尔曼滤波框架对惯性测量单元(inertial measurement unita, IMU)、编码器、鱼眼相机进行多传感器融合,来实时估计爬壁机器人的位姿;张文等[10 ] 提出了一种基于外部RGB-D深度相机和IMU的爬壁机器人定位方法,采用目标跟踪算法进行初步定位,并设计串联的扩展卡尔曼滤波器,来实现机器人定位中的姿态估计;针对爬壁机器人在立面作业时难以判断障碍物高度的问题,张小俊等[11 ] 将红外传感器、激光雷达测得的数据及超声测距数据输入支持向量机的多传感器数据融合模型,求出障碍物的准确位置,规划机器人行进速度;丁杰月等[12 ] 设计了一套罐体检测爬壁机器人控制系统,该系统在焊缝识别的基础上,采用自适应权重算法并融合位姿仪、里程计实现了机器人空间定位,弥补了传统机器人空间定位方式的不足;汪潼等[13 ] 针对立式储罐的测量需求,设计了基于激光跟踪仪的爬壁机器人路径规划方法,根据测点分布规划机器人的测量路径,从而实现了高效、高精度的容量计量. ...
基于数据融合的爬壁机器人控制系统设计
1
2023
... 近年来,针对爬壁机器人多传感器融合定位及导航,国内外学者进行了深入研究.如:张文等[9 ] 提出了采用机载鱼眼相机观测地面ArUco码的定位方案,并通过误差状态扩展卡尔曼滤波框架对惯性测量单元(inertial measurement unita, IMU)、编码器、鱼眼相机进行多传感器融合,来实时估计爬壁机器人的位姿;张文等[10 ] 提出了一种基于外部RGB-D深度相机和IMU的爬壁机器人定位方法,采用目标跟踪算法进行初步定位,并设计串联的扩展卡尔曼滤波器,来实现机器人定位中的姿态估计;针对爬壁机器人在立面作业时难以判断障碍物高度的问题,张小俊等[11 ] 将红外传感器、激光雷达测得的数据及超声测距数据输入支持向量机的多传感器数据融合模型,求出障碍物的准确位置,规划机器人行进速度;丁杰月等[12 ] 设计了一套罐体检测爬壁机器人控制系统,该系统在焊缝识别的基础上,采用自适应权重算法并融合位姿仪、里程计实现了机器人空间定位,弥补了传统机器人空间定位方式的不足;汪潼等[13 ] 针对立式储罐的测量需求,设计了基于激光跟踪仪的爬壁机器人路径规划方法,根据测点分布规划机器人的测量路径,从而实现了高效、高精度的容量计量. ...
基于数据融合的爬壁机器人控制系统设计
1
2023
... 近年来,针对爬壁机器人多传感器融合定位及导航,国内外学者进行了深入研究.如:张文等[9 ] 提出了采用机载鱼眼相机观测地面ArUco码的定位方案,并通过误差状态扩展卡尔曼滤波框架对惯性测量单元(inertial measurement unita, IMU)、编码器、鱼眼相机进行多传感器融合,来实时估计爬壁机器人的位姿;张文等[10 ] 提出了一种基于外部RGB-D深度相机和IMU的爬壁机器人定位方法,采用目标跟踪算法进行初步定位,并设计串联的扩展卡尔曼滤波器,来实现机器人定位中的姿态估计;针对爬壁机器人在立面作业时难以判断障碍物高度的问题,张小俊等[11 ] 将红外传感器、激光雷达测得的数据及超声测距数据输入支持向量机的多传感器数据融合模型,求出障碍物的准确位置,规划机器人行进速度;丁杰月等[12 ] 设计了一套罐体检测爬壁机器人控制系统,该系统在焊缝识别的基础上,采用自适应权重算法并融合位姿仪、里程计实现了机器人空间定位,弥补了传统机器人空间定位方式的不足;汪潼等[13 ] 针对立式储罐的测量需求,设计了基于激光跟踪仪的爬壁机器人路径规划方法,根据测点分布规划机器人的测量路径,从而实现了高效、高精度的容量计量. ...
基于多传感器融合的爬壁机器人控制系统研究
1
2018
... 近年来,针对爬壁机器人多传感器融合定位及导航,国内外学者进行了深入研究.如:张文等[9 ] 提出了采用机载鱼眼相机观测地面ArUco码的定位方案,并通过误差状态扩展卡尔曼滤波框架对惯性测量单元(inertial measurement unita, IMU)、编码器、鱼眼相机进行多传感器融合,来实时估计爬壁机器人的位姿;张文等[10 ] 提出了一种基于外部RGB-D深度相机和IMU的爬壁机器人定位方法,采用目标跟踪算法进行初步定位,并设计串联的扩展卡尔曼滤波器,来实现机器人定位中的姿态估计;针对爬壁机器人在立面作业时难以判断障碍物高度的问题,张小俊等[11 ] 将红外传感器、激光雷达测得的数据及超声测距数据输入支持向量机的多传感器数据融合模型,求出障碍物的准确位置,规划机器人行进速度;丁杰月等[12 ] 设计了一套罐体检测爬壁机器人控制系统,该系统在焊缝识别的基础上,采用自适应权重算法并融合位姿仪、里程计实现了机器人空间定位,弥补了传统机器人空间定位方式的不足;汪潼等[13 ] 针对立式储罐的测量需求,设计了基于激光跟踪仪的爬壁机器人路径规划方法,根据测点分布规划机器人的测量路径,从而实现了高效、高精度的容量计量. ...
基于多传感器融合的爬壁机器人控制系统研究
1
2018
... 近年来,针对爬壁机器人多传感器融合定位及导航,国内外学者进行了深入研究.如:张文等[9 ] 提出了采用机载鱼眼相机观测地面ArUco码的定位方案,并通过误差状态扩展卡尔曼滤波框架对惯性测量单元(inertial measurement unita, IMU)、编码器、鱼眼相机进行多传感器融合,来实时估计爬壁机器人的位姿;张文等[10 ] 提出了一种基于外部RGB-D深度相机和IMU的爬壁机器人定位方法,采用目标跟踪算法进行初步定位,并设计串联的扩展卡尔曼滤波器,来实现机器人定位中的姿态估计;针对爬壁机器人在立面作业时难以判断障碍物高度的问题,张小俊等[11 ] 将红外传感器、激光雷达测得的数据及超声测距数据输入支持向量机的多传感器数据融合模型,求出障碍物的准确位置,规划机器人行进速度;丁杰月等[12 ] 设计了一套罐体检测爬壁机器人控制系统,该系统在焊缝识别的基础上,采用自适应权重算法并融合位姿仪、里程计实现了机器人空间定位,弥补了传统机器人空间定位方式的不足;汪潼等[13 ] 针对立式储罐的测量需求,设计了基于激光跟踪仪的爬壁机器人路径规划方法,根据测点分布规划机器人的测量路径,从而实现了高效、高精度的容量计量. ...
立式罐容量计量中爬壁机器人的路径规划
1
2024
... 近年来,针对爬壁机器人多传感器融合定位及导航,国内外学者进行了深入研究.如:张文等[9 ] 提出了采用机载鱼眼相机观测地面ArUco码的定位方案,并通过误差状态扩展卡尔曼滤波框架对惯性测量单元(inertial measurement unita, IMU)、编码器、鱼眼相机进行多传感器融合,来实时估计爬壁机器人的位姿;张文等[10 ] 提出了一种基于外部RGB-D深度相机和IMU的爬壁机器人定位方法,采用目标跟踪算法进行初步定位,并设计串联的扩展卡尔曼滤波器,来实现机器人定位中的姿态估计;针对爬壁机器人在立面作业时难以判断障碍物高度的问题,张小俊等[11 ] 将红外传感器、激光雷达测得的数据及超声测距数据输入支持向量机的多传感器数据融合模型,求出障碍物的准确位置,规划机器人行进速度;丁杰月等[12 ] 设计了一套罐体检测爬壁机器人控制系统,该系统在焊缝识别的基础上,采用自适应权重算法并融合位姿仪、里程计实现了机器人空间定位,弥补了传统机器人空间定位方式的不足;汪潼等[13 ] 针对立式储罐的测量需求,设计了基于激光跟踪仪的爬壁机器人路径规划方法,根据测点分布规划机器人的测量路径,从而实现了高效、高精度的容量计量. ...
立式罐容量计量中爬壁机器人的路径规划
1
2024
... 近年来,针对爬壁机器人多传感器融合定位及导航,国内外学者进行了深入研究.如:张文等[9 ] 提出了采用机载鱼眼相机观测地面ArUco码的定位方案,并通过误差状态扩展卡尔曼滤波框架对惯性测量单元(inertial measurement unita, IMU)、编码器、鱼眼相机进行多传感器融合,来实时估计爬壁机器人的位姿;张文等[10 ] 提出了一种基于外部RGB-D深度相机和IMU的爬壁机器人定位方法,采用目标跟踪算法进行初步定位,并设计串联的扩展卡尔曼滤波器,来实现机器人定位中的姿态估计;针对爬壁机器人在立面作业时难以判断障碍物高度的问题,张小俊等[11 ] 将红外传感器、激光雷达测得的数据及超声测距数据输入支持向量机的多传感器数据融合模型,求出障碍物的准确位置,规划机器人行进速度;丁杰月等[12 ] 设计了一套罐体检测爬壁机器人控制系统,该系统在焊缝识别的基础上,采用自适应权重算法并融合位姿仪、里程计实现了机器人空间定位,弥补了传统机器人空间定位方式的不足;汪潼等[13 ] 针对立式储罐的测量需求,设计了基于激光跟踪仪的爬壁机器人路径规划方法,根据测点分布规划机器人的测量路径,从而实现了高效、高精度的容量计量. ...
基于ROS的全向移动机器人定位导航系统研究
1
2020
... 为了实现在垂直壁面稳定爬行,爬壁机器人需要吸附能力强、转向灵活、能适应复杂壁面的底盘结构.差速运动模型结构紧凑,运行平稳及通过性好,因此在移动机器人领域得到广泛使用[14 ] .为了使机器人能够更好地适应复杂的壁面环境,本文基于四轮差速运动模型,设计了一款主体为永磁间隙吸附装置的爬壁机器人,实物如图1 所示. ...
基于ROS的全向移动机器人定位导航系统研究
1
2020
... 为了实现在垂直壁面稳定爬行,爬壁机器人需要吸附能力强、转向灵活、能适应复杂壁面的底盘结构.差速运动模型结构紧凑,运行平稳及通过性好,因此在移动机器人领域得到广泛使用[14 ] .为了使机器人能够更好地适应复杂的壁面环境,本文基于四轮差速运动模型,设计了一款主体为永磁间隙吸附装置的爬壁机器人,实物如图1 所示. ...
基于激光雷达的同时定位与地图构建方法综述
1
2020
... 里程计用于监测和估计机器人在运动中的位姿信息,包括移动距离和偏航角度,是实现机器人建图与导航的基础信息[15 -16 ] .爬壁机器人通过搭载在驱动轮上的霍尔编码器获取车轮转速,结合底盘运动学模型解算出角速度ω 和线速度v 并对其积分,获得机器人相对于起始点的位置信息.用向量 P X Y θ
基于激光雷达的同时定位与地图构建方法综述
1
2020
... 里程计用于监测和估计机器人在运动中的位姿信息,包括移动距离和偏航角度,是实现机器人建图与导航的基础信息[15 -16 ] .爬壁机器人通过搭载在驱动轮上的霍尔编码器获取车轮转速,结合底盘运动学模型解算出角速度ω 和线速度v 并对其积分,获得机器人相对于起始点的位置信息.用向量 P X Y θ
基于粒子滤波的自主移动机器人快速定位方法
1
2020
... 里程计用于监测和估计机器人在运动中的位姿信息,包括移动距离和偏航角度,是实现机器人建图与导航的基础信息[15 -16 ] .爬壁机器人通过搭载在驱动轮上的霍尔编码器获取车轮转速,结合底盘运动学模型解算出角速度ω 和线速度v 并对其积分,获得机器人相对于起始点的位置信息.用向量 P X Y θ
基于粒子滤波的自主移动机器人快速定位方法
1
2020
... 里程计用于监测和估计机器人在运动中的位姿信息,包括移动距离和偏航角度,是实现机器人建图与导航的基础信息[15 -16 ] .爬壁机器人通过搭载在驱动轮上的霍尔编码器获取车轮转速,结合底盘运动学模型解算出角速度ω 和线速度v 并对其积分,获得机器人相对于起始点的位置信息.用向量 P X Y θ
Steerable dry-adhesive linkage-type wall-climbing robot
1
2020
... 爬壁机器人在壁面爬行时,存在着灵活运动与稳定吸附之间的矛盾,其在转向时会出现滑移等状况[17 -18 ] ,使得里程计发生位置漂移,无法准确检测滑动距离[19 ] .为了减小里程计的检测误差,采用滤波算法将编码器与IMU的数据进行融合.经典的卡尔曼滤波只适用于线性系统,而爬壁机器人的运动方程和观测方程往往是非线性的[20 ] ,因此需要将非线性系统转换成近似的线性系统,这一过程通常通过EKF来实现[21 ] .对此,本文提出了一种融合里程计算法,即采用EKF算法对编码器和IMU的数据进行融合. ...
Analysis and optimization of the wall-climbing robot with an adsorption system and adhesive belts
1
2020
... 爬壁机器人在壁面爬行时,存在着灵活运动与稳定吸附之间的矛盾,其在转向时会出现滑移等状况[17 -18 ] ,使得里程计发生位置漂移,无法准确检测滑动距离[19 ] .为了减小里程计的检测误差,采用滤波算法将编码器与IMU的数据进行融合.经典的卡尔曼滤波只适用于线性系统,而爬壁机器人的运动方程和观测方程往往是非线性的[20 ] ,因此需要将非线性系统转换成近似的线性系统,这一过程通常通过EKF来实现[21 ] .对此,本文提出了一种融合里程计算法,即采用EKF算法对编码器和IMU的数据进行融合. ...
基于优化Hector-SLAM算法的机器人自主导航系统设计
1
2023
... 爬壁机器人在壁面爬行时,存在着灵活运动与稳定吸附之间的矛盾,其在转向时会出现滑移等状况[17 -18 ] ,使得里程计发生位置漂移,无法准确检测滑动距离[19 ] .为了减小里程计的检测误差,采用滤波算法将编码器与IMU的数据进行融合.经典的卡尔曼滤波只适用于线性系统,而爬壁机器人的运动方程和观测方程往往是非线性的[20 ] ,因此需要将非线性系统转换成近似的线性系统,这一过程通常通过EKF来实现[21 ] .对此,本文提出了一种融合里程计算法,即采用EKF算法对编码器和IMU的数据进行融合. ...
基于优化Hector-SLAM算法的机器人自主导航系统设计
1
2023
... 爬壁机器人在壁面爬行时,存在着灵活运动与稳定吸附之间的矛盾,其在转向时会出现滑移等状况[17 -18 ] ,使得里程计发生位置漂移,无法准确检测滑动距离[19 ] .为了减小里程计的检测误差,采用滤波算法将编码器与IMU的数据进行融合.经典的卡尔曼滤波只适用于线性系统,而爬壁机器人的运动方程和观测方程往往是非线性的[20 ] ,因此需要将非线性系统转换成近似的线性系统,这一过程通常通过EKF来实现[21 ] .对此,本文提出了一种融合里程计算法,即采用EKF算法对编码器和IMU的数据进行融合. ...
Multi-sensor information fusion for mobile robots
1
2021
... 爬壁机器人在壁面爬行时,存在着灵活运动与稳定吸附之间的矛盾,其在转向时会出现滑移等状况[17 -18 ] ,使得里程计发生位置漂移,无法准确检测滑动距离[19 ] .为了减小里程计的检测误差,采用滤波算法将编码器与IMU的数据进行融合.经典的卡尔曼滤波只适用于线性系统,而爬壁机器人的运动方程和观测方程往往是非线性的[20 ] ,因此需要将非线性系统转换成近似的线性系统,这一过程通常通过EKF来实现[21 ] .对此,本文提出了一种融合里程计算法,即采用EKF算法对编码器和IMU的数据进行融合. ...
ESPEE: event-based sensor pose estimation using an extended Kalman filter
1
2021
... 爬壁机器人在壁面爬行时,存在着灵活运动与稳定吸附之间的矛盾,其在转向时会出现滑移等状况[17 -18 ] ,使得里程计发生位置漂移,无法准确检测滑动距离[19 ] .为了减小里程计的检测误差,采用滤波算法将编码器与IMU的数据进行融合.经典的卡尔曼滤波只适用于线性系统,而爬壁机器人的运动方程和观测方程往往是非线性的[20 ] ,因此需要将非线性系统转换成近似的线性系统,这一过程通常通过EKF来实现[21 ] .对此,本文提出了一种融合里程计算法,即采用EKF算法对编码器和IMU的数据进行融合. ...
EKF-SLAM for AUV navigation under probabilistic sonar scan-matching
1
2010
... EKF算法分为预测和更新两个步骤,分别基于系统的状态模型和观测模型来实现[22 ] .以轮式里程计模型为系统状态方程,通过编码器和IMU获取机器人的状态向量 X k
RTAB-Map as an open-source lidar and visual simultaneous localization and mapping library for large-scale and long-term online operation
1
2019
... RTAB-Map是一种基于图优化的SLAM(simultaneous localization and mapping,同步定位与地图构建)算法,作为RGB-D SLAM中使用最广泛的算法之一,能够利用深度信息构建用于机器人避障、导航的三维点云地图[23 ] .本文针对垂直壁面环境,将传统RTAB-Map算法框架中的轮式里程计数据与IMU数据相结合而作为融合里程计的输入,同时添加激光雷达,来提高爬壁机器人的位姿估计精度及感知范围.改进RTAB-Map算法的框架如图3 所示. ...
Graphic information processing algorithm based on visual word-of-bag model
1
2015
... 此外,还需要对全局地图作进一步的闭环检测和全局优化.在RTAB-Map算法中,闭环检测通过视觉词袋模型[24 ] 和贝叶斯滤波器实现.视觉词袋模型通过计算当前位姿节点与工作内存(working memory,WM)节点之间的相似度s 来更新定位点的权重,判断该节点参与闭环检测还是移入长期记忆(long-term memory,LTM)模块. ...
UAV design and control with A* algorithm
1
2021
... 爬壁机器人获得目标点位置后,采用启发式A*搜索算法生成全局最优路径.A*算法是基于启发函数构建代价函数,对当前节点距离起始点和目标点的代价值进行计算,并将代价值最小的节点作为最优解点,以减小搜索空间[25 ] .启发代价函数f (n )为: ...
Reinforcement based mobile robot path planning with improved dynamic window approach in unknown environment
1
2021
... 局部路径规划旨在实现对机器人速度及加速度的精准约束与控制,在全局规划所生成路径的基础上,推算出机器人的运动轨迹.动态窗口算法(dynamic window approach,DWA)通过接收全局路径信息、地图信息及里程计信息等,实时计算并输出底盘运动参数[26 ] .爬壁机器人工作时,需要实时感知障碍物距离并调整路径,避免发生碰撞.壁面轨迹规划算法的流程如下: ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}