基于改进RTAB-Map算法的爬壁机器人导航研究
Research on navigation of wall-climbing robot based on improved RTAB-Map algorithm
基于改进RTAB-Map算法的爬壁机器人导航研究 |
| 覃超,唐东林,游东潘,丁超,饶胜,何媛媛 |
|
Research on navigation of wall-climbing robot based on improved RTAB-Map algorithm |
| Chao QIN,Donglin TANG,Dongpan YOU,Chao DING,Sheng RAO,Yuanyuan HE |
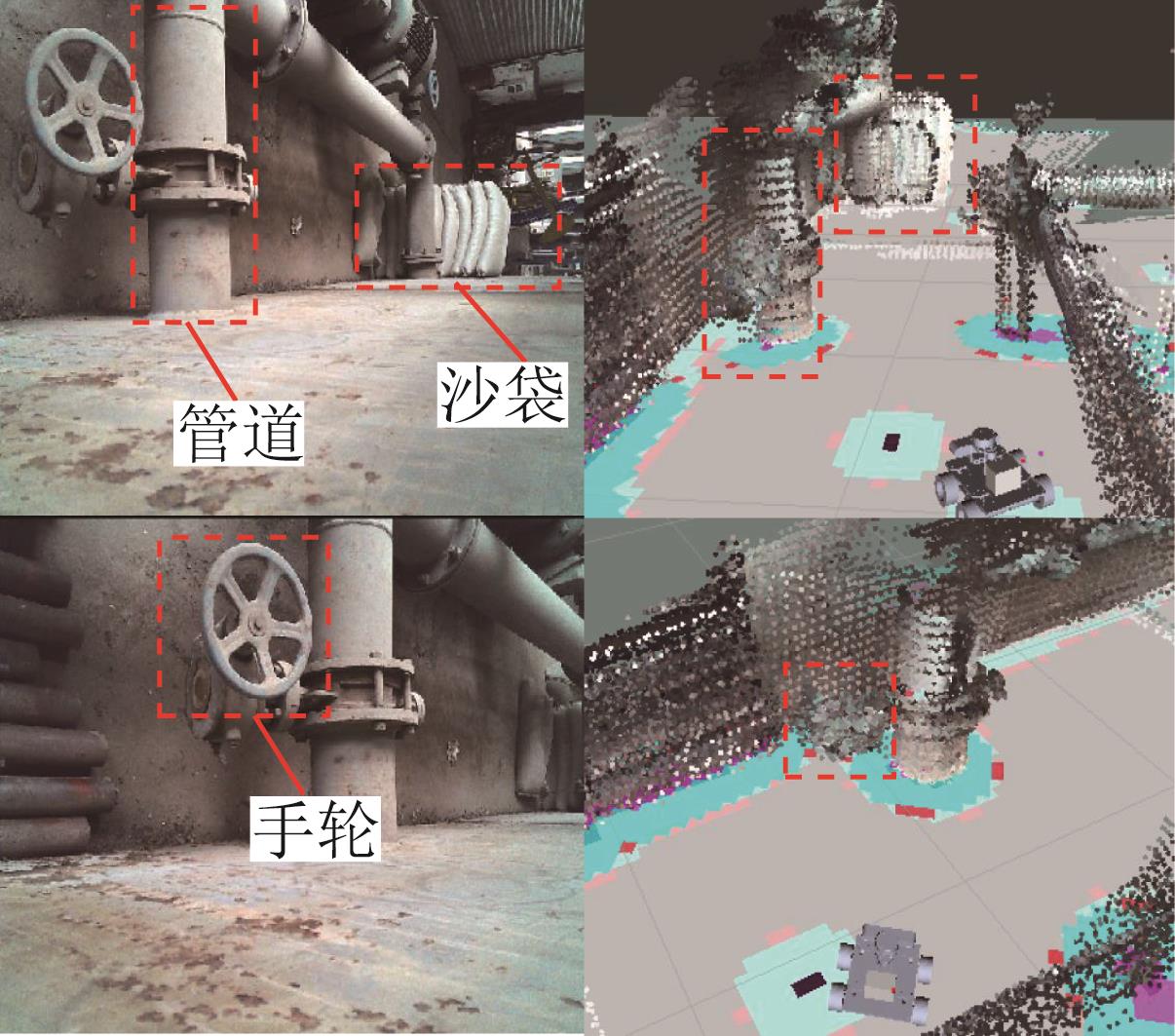
| 图13 壁面环境建图效果 |
| Fig.13 Wall environment mapping effect |
|
|