


本文针对老年人及偏瘫患者的康复训练需求,以及为实现下肢康复外骨骼助力效果的可视化,设计了一种基于盘式电机驱动的坐卧式下肢康复外骨骼,并通过OpenSim软件开展人机耦合的生物力学仿真,以分析该下肢康复外骨骼的助力效果以及助力过程中人体下肢肌力和肌肉激活度的变化情况。最后,开展基于位置跟踪控制的被动康复训练实验以及抗阻康复训练实验,并通过实时监测人体下肢关节角度和目标肌群的表面肌电信号来评估所设计的下肢康复外骨骼的性能,从而验证其不同康复训练模式的有效性。
1 下肢康复外骨骼设计及样机搭建
1.1 外骨骼整体机构设计
传统的康复外骨骼可用性欠佳的主要原因是外骨骼的质量、尺寸较大,且一体化的结构设计使得患者难以自主穿戴和搬运。因此,在设计康复外骨骼时应贯彻“拟人化”的设计思想,除了要考虑其关节自由度与人体的相似性外,还要考虑其可调节性、穿戴舒适性以及快速穿脱性。
基于此,本文对传统下肢康复外骨骼的本体结构、传感系统和人机绑缚连接方式进行了创新设计,并对其主动助力关节进行了紧凑化、轻量化处理。鉴于单侧或双侧运动障碍患者的下肢肌肉力量薄弱,无法自主支撑上身重量,选择髋关节、膝关节作为下肢康复外骨骼的主动关节。
本文所设计的基于盘式电机驱动的下肢康复外骨骼的结构如图1所示,主要包括腰部结构和腿部结构(髋关节驱动单元、膝关节驱动单元、大腿调节杆、小腿调节杆和绑缚装置)等。由于人体下肢主要通过髋、膝关节的屈伸运动完成行走,为了控制方便,只考虑髋关节和膝关节的屈伸自由度。下肢康复外骨骼的腿部杆件的材质为7075硬质航空铝合金,其不仅具有较好的力学性能和耐酸耐腐蚀性能,而且能极大地减小外骨骼的质量。
图1

图1
下肢康复外骨骼结构示意
Fig.1
Structure diagram of lower limb rehabilitation exoskeleton
为了保证下肢康复外骨骼能与人体腿部进行实时交互,分别在大腿调节杆、小腿调节杆上安装绑缚装置,通过绑带将外骨骼与人体腿部紧密连接在一起。大腿调节杆的结构设计与小腿调节杆相似;考虑到大腿的横截面较大,大腿绑缚装置应比小腿绑缚装置更长、更宽,且包裹性更好,但其主要结构与小腿绑缚装置相同。绑缚装置的外围均由硬质塑料结构作为支撑,以保证运动过程中人机耦合系统不会因超前或滞后而失衡;内层选择柔软透气且形状可恢复的内衬,作为与人体直接接触的介质。
1.2 外骨骼腰部结构设计
图2
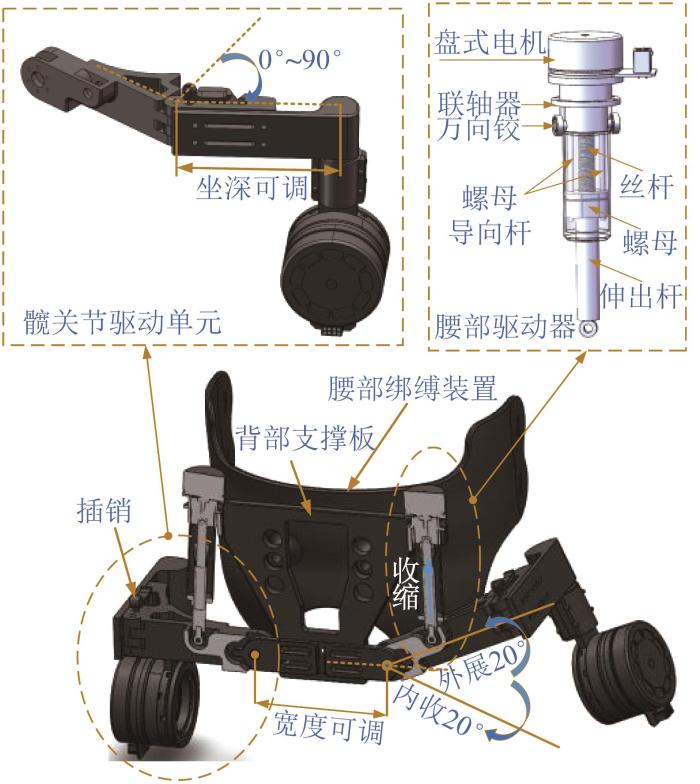
图2
下肢康复外骨骼髋关节外展内收驱动设计
Fig.2
Design of hip joint abduction and adduction drive for lower limb rehabilitation exoskeleton
采用插销作为快速拆卸和安装下肢康复外骨骼腰部与腿部的连接结构,以提高其穿戴便捷性。同时,为保证下肢康复外骨骼能够适应不同体型的穿戴者,在外骨骼的腰部与腿部的连接处设置了2个采用螺栓定位的可调节组件,以实现坐宽400~480 mm和坐深114~184 mm的调节。腰部绑缚装置采用纺织物包覆设计,增加了腰部穿戴模块与人体躯干的贴合程度,保证了下肢康复外骨骼在竖直和水平方向上的运动稳定性。
1.3 外骨骼腿部结构设计
下肢康复外骨骼的腿部结构主要包括髋关节驱动单元、膝关节驱动单元、大腿调节杆和小腿调节杆等。为满足下肢康复外骨骼的拟人化设计需求,参照GB/T 10000—2023《中国成年人人体尺寸》[14],将大腿调节杆的伸缩范围设计为460~520 mm,小腿调节杆的伸缩范围设计为350~410 mm;杆件表面设置了7个间距为10 mm的定位孔,以满足外骨骼大腿杆件和小腿杆件的尺寸调节要求。大腿调节杆的质量为1.35 kg,小腿调节杆的质量为1.05 kg。
1.4 外骨骼样机搭建
图3
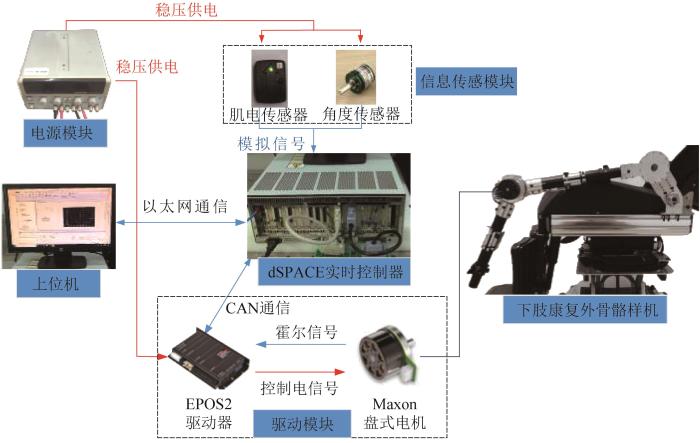
图3
下肢康复外骨骼样机系统控制框图
Fig.3
Control block diagram of lower limb rehabilitation exoskeleton prototype system
图4
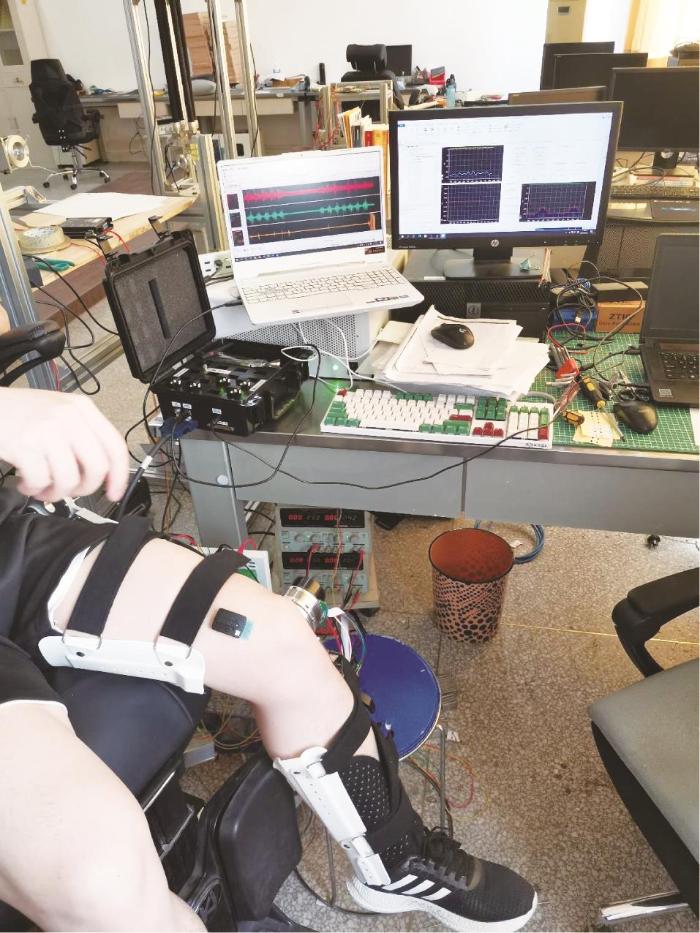
图4
下肢康复外骨骼样机穿戴现场
Fig.4
Wearing site of lower limb rehabilitation exoskeleton prototype
由于下肢康复外骨骼的膝关节为主动运动关节,驱动模块采用Maxon盘式电机(型号为EC60flat),其额定功率为150 W,额定转速为3 480 r/min,额定扭矩为0.401 N·m,额定电压为24 V。由人体下肢生物力学数据可知[15],正常体型(60 kg)人体的膝关节的最大力矩大约为42 N·m,最大角速度约为7.2 rad/s。为满足下肢偏瘫患者主/被动康复训练的需求,考虑到电机的性能与控制稳定性,配备SHD-17-100-2SH型谐波减速器,其减速比为100,可承受的最大扭矩为95 N·m。同时,为匹配系统通信方式和满足控制需求,电机驱动器选用EPOS2伺服驱动器,以实现电流、速度和位置的同步控制。信息传感模块主要包括角度传感器和肌电传感器,分别用于实时监测下肢康复外骨骼膝关节的角度和人体下肢肌肉激活度。本文采用图5所示的Delsys无线表面肌电采集系统来采集人体下肢肌肉表面的肌电信号。电源模块采用稳压电源,能稳定实现以24 V电压对电机供电和以5 V电压对角度传感器供电。控制器采用dSPACE实时控制器,通过其内置的各种控制板卡来建立驱动模块、信息传感模块与上位机之间的联系。上位机包含运动控制程序和人机交互界面,能够实时监测下肢康复外骨骼和人体下肢的运动数据并通过调整相关参数来实时控制外骨骼的运动。
图5

图5
Delsys无线表面肌电采集系统
Fig.5
Delsys wireless surface electromyography acquisition system
2 基于OpenSim的人机耦合仿真分析
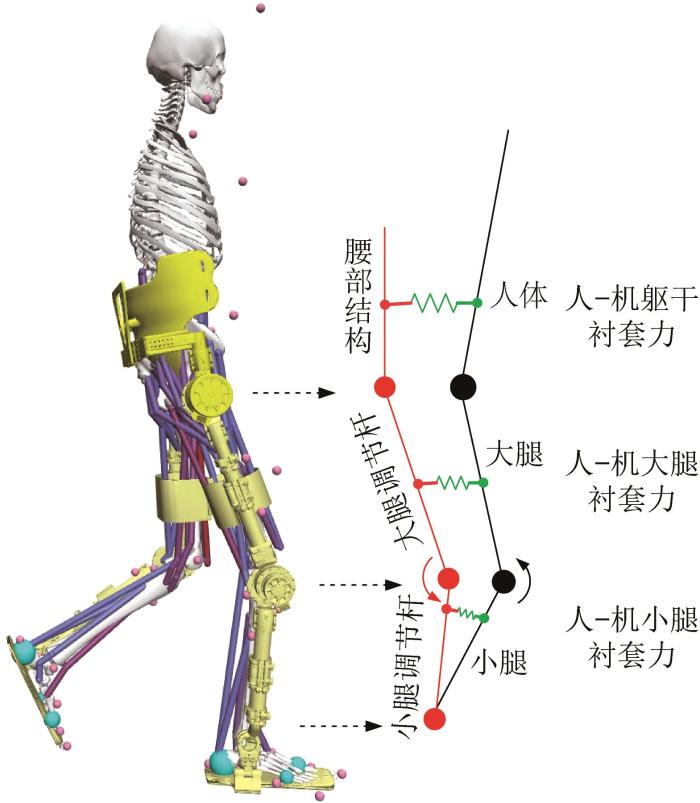
为了分析所设计的下肢康复外骨骼与人体构成的人机耦合系统的性能,本文利用OpenSim软件开展人机耦合的生物力学仿真。在OpenSim软件中构建人体-下肢康复外骨骼耦合模型(简称人机耦合模型)的步骤如下:首先,将利用SolidWorks软件建立的下肢康复外骨骼模型简化为主要关节和杆件,并封装为腰部、大腿、小腿和脚部模块,以STL文件格式导出;然后,确定各模块的质量、转动惯量以及质心位置等;最后,将STL文件复制到OpenSim软件的安装目录下,在Notepad模块中将外骨骼模型导入人体模型的XML文件中,以建立人机耦合模型,同时调整外骨骼各模块模型与肌肉骨骼模型的对应位置以及连接方式。
在下肢康复外骨骼模型中,每条腿均有3个主动自由度,包括髋关节屈曲/伸展、膝关节屈曲/伸展和踝关节跖屈/背屈。人机耦合模型中的人体模型采用斯坦福大学的AjaySeth等搭建的Gait2354肌肉骨骼模型[16]。根据实验人员的体型参数,对人机耦合模型中外骨骼模型各模块的尺寸、质量、转动惯量和质心位置等参数进行调节,并以利用实验室运动捕捉系统采集到的人体平地行走运动过程中下肢各关节的角度变化值作为仿真过程的运动输入,以确保仿真系统接近真实的实验环境。
2.1 人机耦合的生物力学仿真
图6
人机耦合系统各关节的运动方程可表示为:
式中:
人机耦合模型的最小化加权平方误差S可表示为:
式中:xi, sub、xi, mod分别为实验测得和仿真得到的第i个标记点的位置,θj, sub、θj, mod分别为实验测得和仿真得到的第
表1 人机耦合模型残差缩减结果的阈值评估范围
Table 1
| 阈值 | 优秀 | 良好 | 不合格 |
|---|---|---|---|
| 最大残余力/N | 0~10 | 10~25 | >25 |
| 平均残余力/N | 0~5 | 5~10 | >10 |
| 最大残余力矩/(N·m) | 0~50 | 50~75 | >75 |
| 平均残余力矩/(N·m) | 0~30 | 30~50 | >50 |
| 最大位移误差/cm | 0~2 | 2~5 | >5 |
| 平均位移误差/cm | 0~2 | 2~4 | >4 |
| 最大角度误差/(º) | 0~2 | 2~5 | >5 |
| 平均角度误差/(º) | 0~2 | 2~5 | >5 |
图7
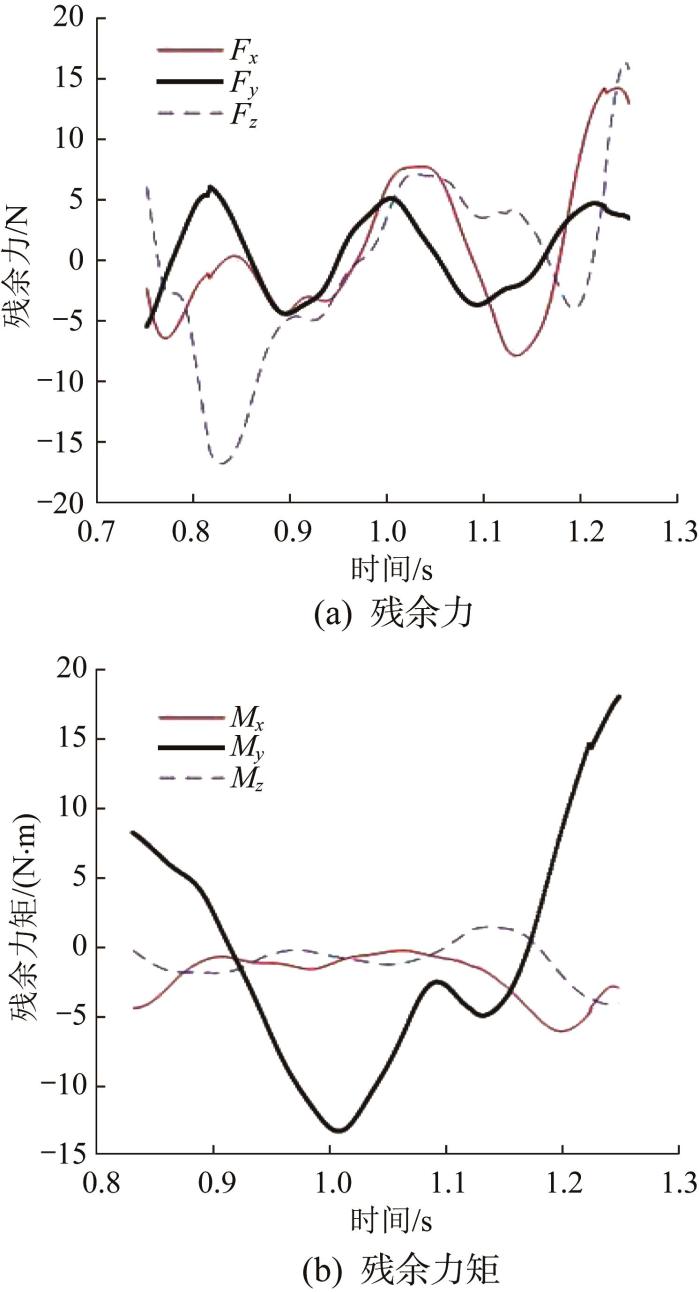
图7
人机耦合模型输出的残余力和残余力矩
Fig.7
Residual force and residual torque output from human-machine coupling model
为了解穿戴外骨骼行走过程中人体下肢的肌力变化情况,在对人机耦合模型进行理论分析的基础上,通过在OpenSim软件中添加已有的具有足够精度的人体运动角度以及地面反作用力数据,并选择Inverse Dynamics工具开展逆动力学仿真,从而获得肌肉骨骼模型中下肢各关节的力矩参数。基于逆动力学仿真结果,绘制穿戴、未穿戴外骨骼情况下人体膝关节力矩随时间的变化曲线,如图8所示(以左膝关节为例)。由图8可知,人体膝关节力矩受下肢康复外骨骼重力的影响较大,膝关节力矩呈现明显的增大趋势。此时,需要左膝关节的伸展肌和屈曲肌积极响应关节运动,通过规律性的收缩产生瞬时肌力,以驱动下肢康复外骨骼绕膝关节运动,同时产生力矩以维持步态过程中的动态平衡。在下肢康复外骨骼辅助力矩的作用下,摆动腿膝关节的输出力矩约减小了50%。
图8
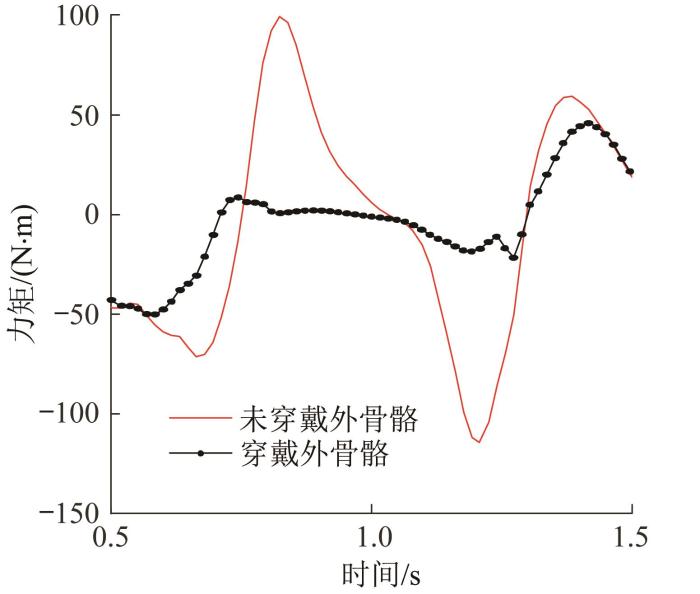
图8
人体左膝关节力矩的变化曲线对比
Fig.8
Comparison of variation curves of left knee joint torque of human body
2.2 基于人机耦合模型的肌肉特性仿真
为验证基于智能轮椅的下肢康复外骨骼辅助患者康复训练的可行性,通过OpenSim软件搭建坐姿下单腿摆动的人机耦合模型(左腿摆动),如图9所示。以屈伸控制训练为研究对象,模拟偏瘫患者膝关节康复训练场景。设计多种不同的康复训练场景(被动和抗阻康复训练),通过改变人体下肢膝关节的运动状态,分析不同训练模式下人体下肢肌力与肌肉激活度的变化情况,以判断下肢康复外骨骼辅助偏瘫患者康复训练的可行性。
图9
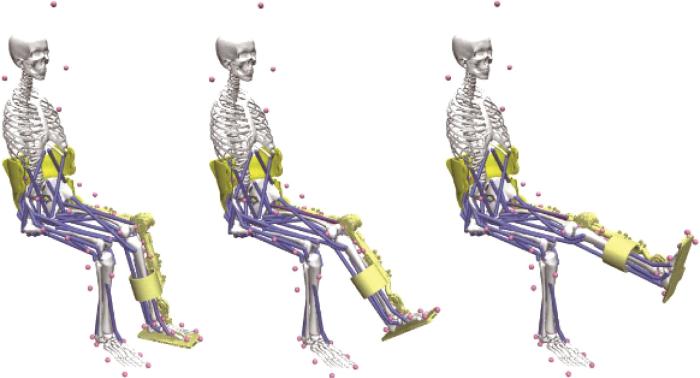
图9
坐姿下单腿摆动的人机耦合模型
Fig.9
Human-machine model with one leg swinging in a sitting position
仿真对象即肌群的选择需考虑多种因素,具体如下:为方便实验结果与仿真结果的比较,选择的肌群应便于表面肌电信号的采集;所选择的肌群在膝关节运动过程中占重要地位,即肌力随膝关节运动具有明显的变化。研究表明:在膝关节的康复训练过程中,股外侧肌和股内侧肌为主要肌肉,协助驱动膝关节伸展和收缩,且这2块肌肉的表面积大,周围肌肉的信号干扰小,便于肌电信号的检测。因此,本文选择股外侧肌和股内侧肌作为主要分析对象。
为获得患者下肢目标肌群在下肢康复外骨骼助力下进行膝关节康复训练过程中的肌力变化情况,对人机耦合模型进行肌肉控制计算(computed muscle control,CMC),本文采用OpenSim软件自带的CMC工具来处理。在进行运算前,在模型中添加肌肉代谢探针来监测人机耦合模型中人体下肢特定肌群的能量变化,此外还要计算人机耦合模型中人体下肢关节角度、关节角速度以及肌力的变化情况。
在康复训练早期,由于患者无主动运动能力,此时训练过程为下肢康复外骨骼带动人腿进行被动康复训练,通过对外骨骼膝关节施加恒定的辅助力矩来辅助人体进行膝关节屈曲/伸展动作,以模拟在外骨骼辅助作用下人体下肢被动康复训练时的肌肉运动情况,其中运动仿真周期为0.7 s。被动康复训练模式下穿戴下肢康复外骨骼作单腿摆动时股内侧肌和股外侧肌的肌力和肌肉激活度的变化情况如图10(a)所示。在康复训练后期,患者已具有主动运动能力,此时对患者进行抗阻康复训练。通过对人机耦合模型中人体下肢增加负重的方法来进行抗阻康复训练下的肌肉特性仿真。抗阻康复训练模式下穿戴下肢康复外骨骼作单腿摆动时股内侧肌和股外侧肌的肌力和肌肉激活度的变化情况如图10(b)所示。
图10
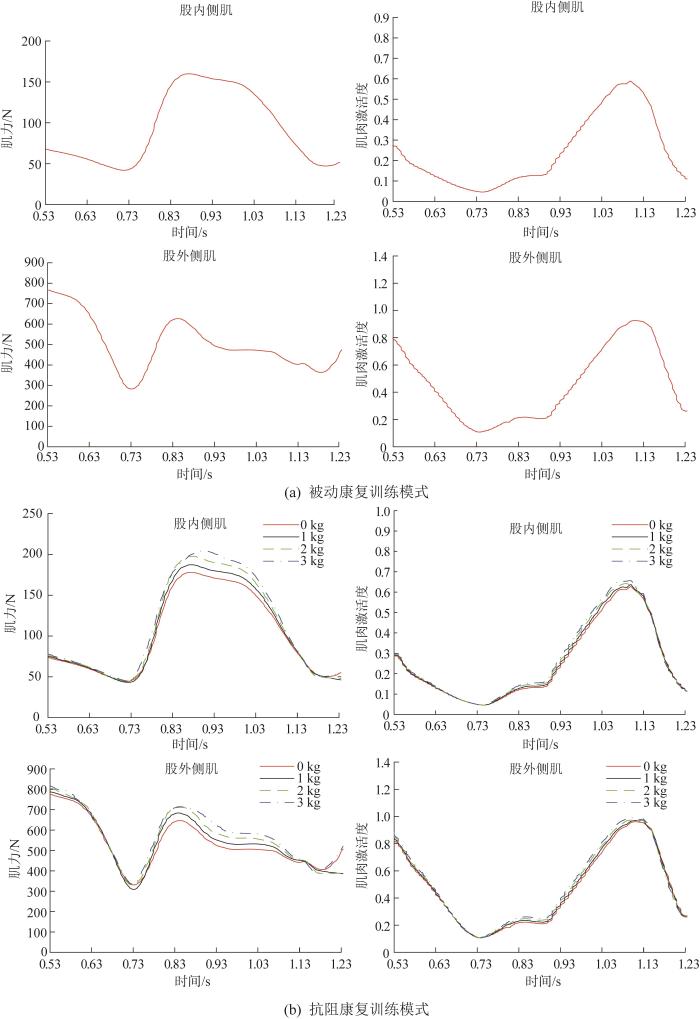
图10
不同康复训练模式下股内侧肌和股外侧肌的肌力和肌肉激活度
Fig.10
Muscle strength and activation of vastus medialis and vastus lateralis under different rehabilitation training modes
结合上述仿真结果可知,被动康复训练阶段人体下肢的肌力和肌肉激活度均小于抗阻康复训练阶段,证明被动康复训练能提供有效助力,帮助患者恢复下肢运动能力;在抗阻康复训练阶段,未添加负重时人体下肢的肌力和肌肉激活度相对较小,添加负重后肌力和肌肉激活度随之提高,证明抗阻模式下的负重训练可实现康复中后期患者下肢肌肉力量增强的目的。此外,相比于股内侧肌,股外侧肌具有更大的肌力和肌肉激活度,说明股外侧肌是参与膝关节摆动运动的主要肌肉。
3 实验验证
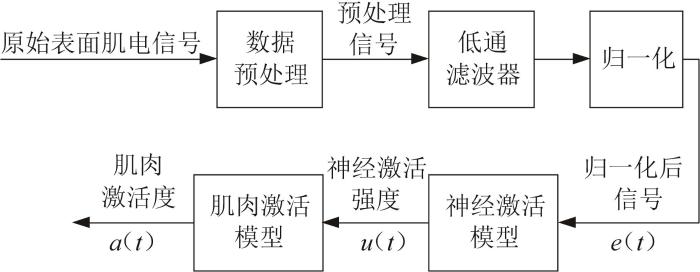
为了进一步测试下肢康复外骨骼辅助患者膝关节康复训练的效果以及验证OpenSim仿真结果,开展被动康复训练和抗阻康复训练实验。在实验中,利用Delsys无线表面肌电采集系统采集受试者下肢股内侧肌和股外侧肌的表面肌电信号。为直观地呈现肌肉的活跃程度,对采集到的表面肌电信号进行处理,以得到肌肉激活度,具体流程如图11所示。
图11
在被动康复训练中,下肢康复外骨骼利用PD(proportional-derivative,比例-微分)控制器,基于期望轨迹和实际轨迹的角度误差进行运动控制。下肢康复外骨骼的PD控制框图如图12所示。
图12
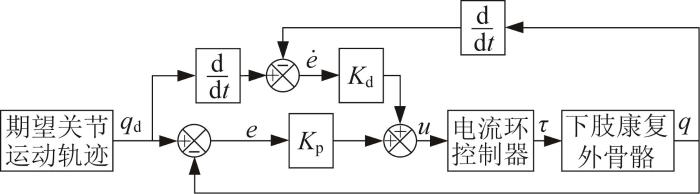
图12
下肢康复外骨骼的PD控制框图
Fig.12
PD control block diagram of lower limb rehabilitation exoskeleton
3.1 被动康复训练实验
被动康复训练实验是指下肢康复外骨骼按照固定轨迹运动,受试者的腿部处于完全放松的状态,在外骨骼的带动下进行运动。在被动康复训练实验中,受试者为3名25岁左右的健康男性,其体重为70~80 kg,身高为1.70~1.78 m。如图13所示,受试者穿戴下肢康复外骨骼样机坐在智能轮椅上进行单腿被动跟随实验,在运动过程中同步检测人体下肢的关节角度信号和表面肌电信号。被动康复训练实验中3名受试者膝关节的运动轨迹及跟随误差如图14所示。其中:期望轨迹为正常人行走过程中的膝关节运动角度,实际轨迹为由角度传感器采集到的膝关节运动角度。由图14可以看出,基于PD控制的下肢康复外骨骼对受试者进行被动康复训练时具有较好的位置跟踪能力,跟随误差保持在-4°~8°范围内。
图13

图14
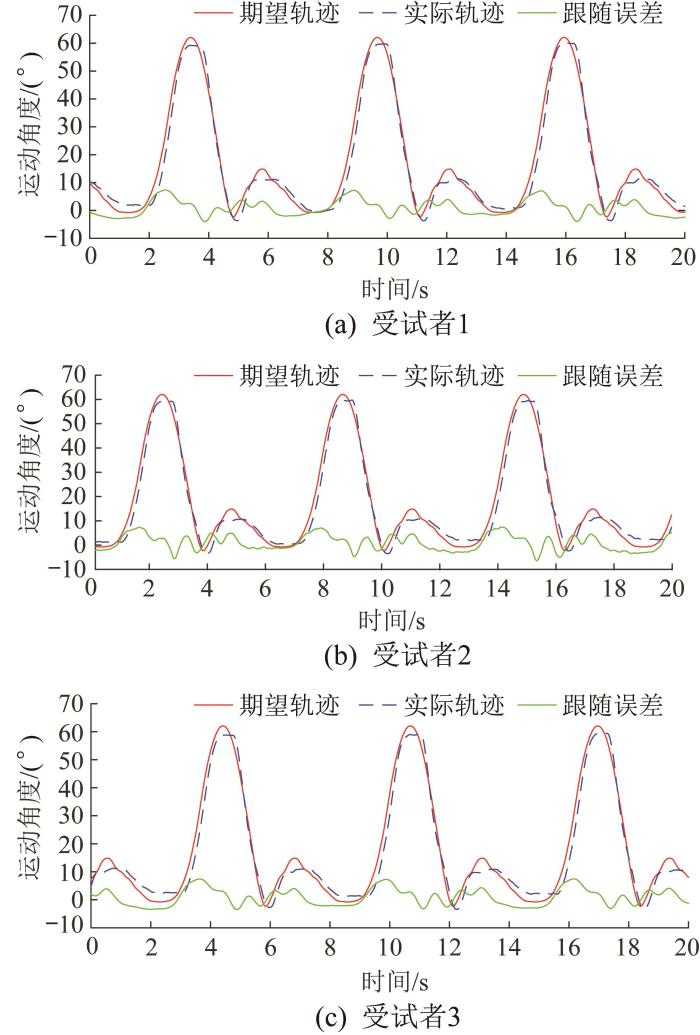
图14
被动康复训练阶段的膝关节运动轨迹及跟随误差
Fig.14
Motion trajectory and tracking error of knee joint during passive rehabilitation training phase
图15
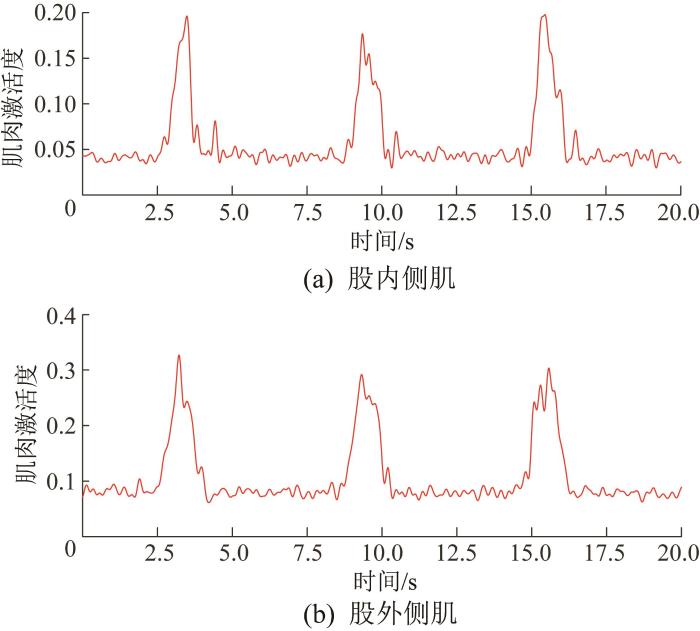
图15
被动康复训练阶段的肌肉激活度
Fig.15
Muscle activation during passive rehabilitation training phase
3.2 抗阻康复训练实验
抗阻康复训练实验是指在受试者穿戴下肢康复外骨骼状态下,通过对受试者小腿增加负重来锻炼其下肢的肌肉力量,以验证偏瘫患者康复中后期进行力量增强型训练的效果。在抗阻康复训练实验中,同样选择3名健康男性进行实验,受试者在腿部质心处绑缚0~3 kg负重并分别在不同摆动速度下做膝关节伸展/屈曲的重复动作,同时在股内侧肌和股外侧肌处粘贴肌电传感器以采集表面肌电信号,如图16所示。
图16
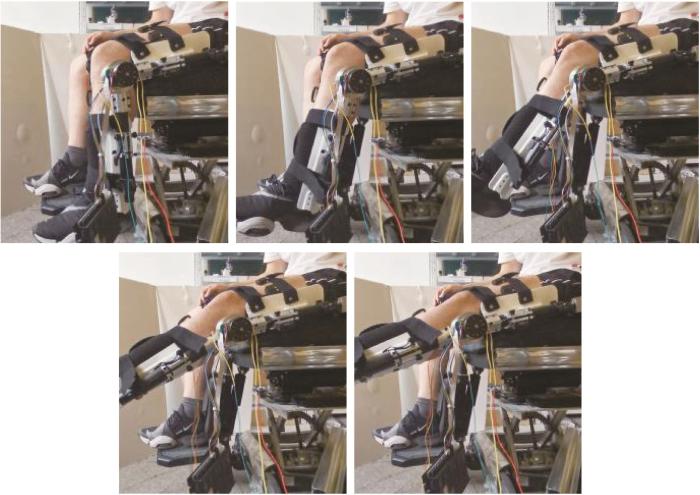
图16
抗阻康复训练阶段膝关节的运动流程
Fig.16
Knee joint movement process during resistance rehabilitation training phase
图17
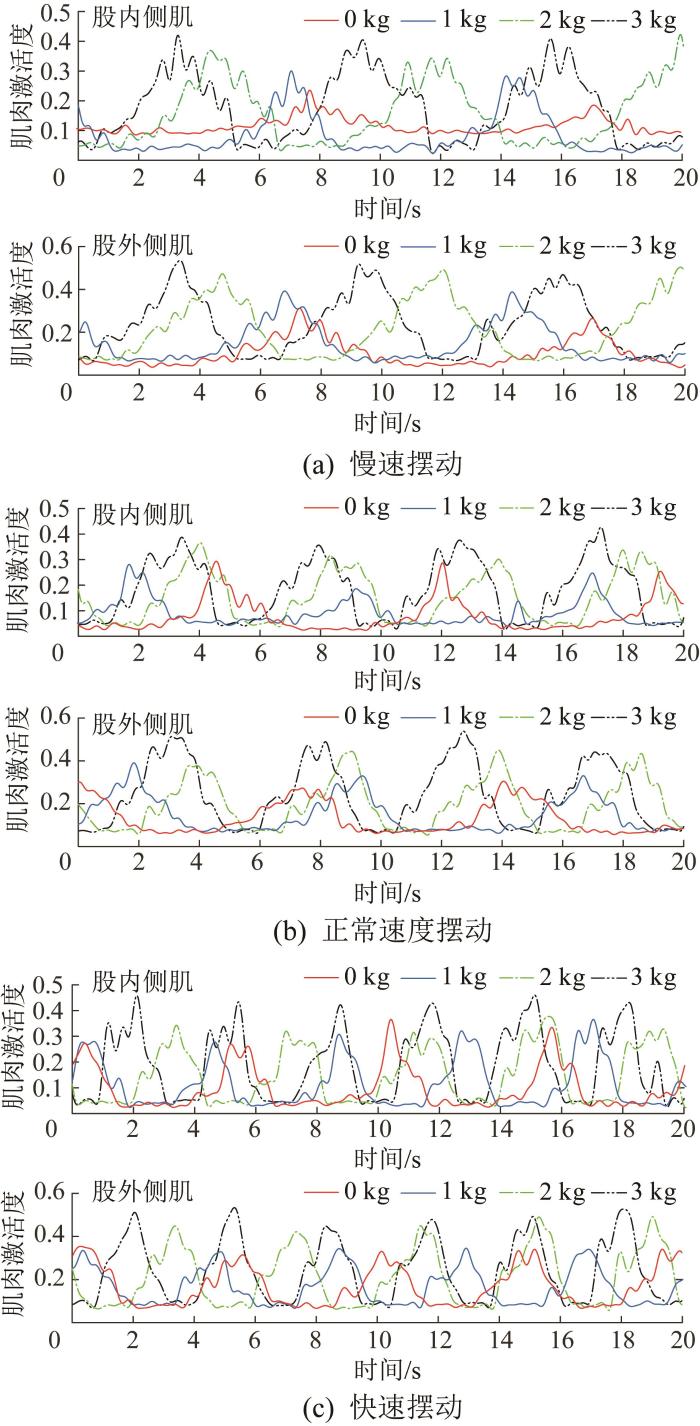
图17
抗阻康复训练阶段不同摆动速度下的肌肉激活度
Fig.17
Muscle activation under different swing speeds during resistance rehabilitation training phase
4 结 论
本文设计了一种下肢康复外骨骼并基于dSPACE实时控制器和Delsys无线表面肌电采集系统搭建了外骨骼样机系统。通过OpenSim软件对所设计的下肢康复外骨骼进行了人机耦合的生物力学分析和肌肉特性仿真。仿真结果表明,相比于未穿戴外骨骼时,穿戴外骨骼能有效减小膝关节力矩;在被动康复训练和抗阻康复训练模式下,在每一个膝关节伸展/屈曲周期内,股内侧肌和股外侧肌的肌肉激活度变化明显,说明外骨骼的助力效果显著。最后,开展了被动康复训练实验和抗阻康复训练实验,并同步采集人体膝关节角度数据以及股内侧肌和股外侧肌的表面肌电信号。实验结果表明,所设计的下肢康复外骨骼具有良好的跟随性和稳定性,能保证患者在被动康复训练、抗阻康复训练中得到有效的训练。
本文主要针对健康人群进行了被动、抗阻康复训练实验,由于健康人群能有效感知外骨骼的运动,其能在实验过程中形成康复策略可靠性及有效性的客观评价,对评估和提升下肢康复外骨骼的性能有重要参考意义。此外,选择健康人群对外骨骼进行初步调试,能有效降低偏瘫患者因无法感知运动量过大而造成的肌肉损伤风险。在后续研究中,将开展偏瘫患者康复训练实验,并同步对患者的髋关节和膝关节进行康复训练。
参考文献
脑卒中患者延续性护理需求的现状及影响因素分析
[J].DOI:10.3969/j.issn.1674-4985.2018.24.019 [本文引用: 1]
Analysis of status and influencing factors of continuing nursing needs of patients with stroke
[J].DOI:10.3969/j.issn.1674-4985.2018.24.019 [本文引用: 1]
Robotics for lower limb rehabilitation
[J].
下肢外骨骼康复机器人在脑卒中康复中的应用和研究进展
[J].DOI:10.3969/j.issn.1001-1242.2021.10.026 [本文引用: 1]
Application and research progress of lower limb exoskeleton rehabilitation robot in stroke rehabilitation
[J].DOI:10.3969/j.issn.1001-1242.2021.10.026 [本文引用: 1]
下肢外骨骼康复机器人的研究进展及发展趋势
[J].
Research progress and development trend of lower extremity exoskeleton rehabilitation robot
[J].
下肢康复机器人结构设计的研究进展
[J].DOI:10.3969/j.issn.1002-3208.2018.01.016
Research advances in structural design of lower limb rehabilitation robot
[J].DOI:10.3969/j.issn.1002-3208.2018.01.016
可穿戴下肢外骨骼康复机器人研究现状与发展趋势
[J].
Current status and development trend of wearable lower-limb exoskeleton rehabilitation robot
[J].
下肢康复机器人控制系统研究进展
[J].DOI:10.3969/j.issn.1002-3208.2018.06.014 [本文引用: 1]
Research progress on control system of lower limb rehabilitation robot
[J].DOI:10.3969/j.issn.1002-3208.2018.06.014 [本文引用: 1]
Intention-based walking support for paraplegia patients with robot suit HAL
[J].
Novel gait adaptation and neuromotor training results using an active leg exoskeleton
[J].
基于力位混合控制的踝关节外骨骼机器人四段式助力技术
[J].DOI:10.3969/j.issn.1000-1093.2021.12.020 [本文引用: 1]
The four-stage assisted technology of flexible ankle exoskeleton robot based on force and position hybrid control
[J].DOI:10.3969/j.issn.1000-1093.2021.12.020 [本文引用: 1]
基于支持向量机的外骨骼机器人灵敏度放大控制
[J].
Support vector machine based sensitivity amplification control for a lower extremity exoskeleton
[J].
基于sEMG的一种下肢外骨骼机器人康复训练控制策略
[J].DOI:10.3969/j.issn.1672-9528.2021.01.075 [本文引用: 1]
A lower limb exoskeleton robot rehabilitation training control strategy based on sEMG
[J].DOI:10.3969/j.issn.1672-9528.2021.01.075 [本文引用: 1]
人体行走下肢生物力学研究
[J].
Biomechanical study of human walking lower limb
[J].
An interactive graphics-based model of the lower extremity to study orthopaedic surgical procedures
[J].
OpenSim: open source to create and analyze dynamic simulations of movement
[J].
Development of single leg version of HAL for hemiplegia
[C]//
Systematic review on wearable lower-limb exoskeletons for gait training in neuromuscular impairments
[J].
An algorithm for generating muscle-actuated simulations of long-duration movements
[C]//

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}