下肢康复外骨骼机器人设计与性能分析
常佳辰( ),韩亚丽(),孙翰,史传棋,赵天
),韩亚丽(),孙翰,史传棋,赵天
),韩亚丽(),孙翰,史传棋,赵天
Design and performance analysis of lower limb rehabilitation exoskeleton robot
Jiachen CHANG(),Yali HAN(),Han SUN,Chuanqi SHI,Tian ZHAO
),Yali HAN(),Han SUN,Chuanqi SHI,Tian ZHAO
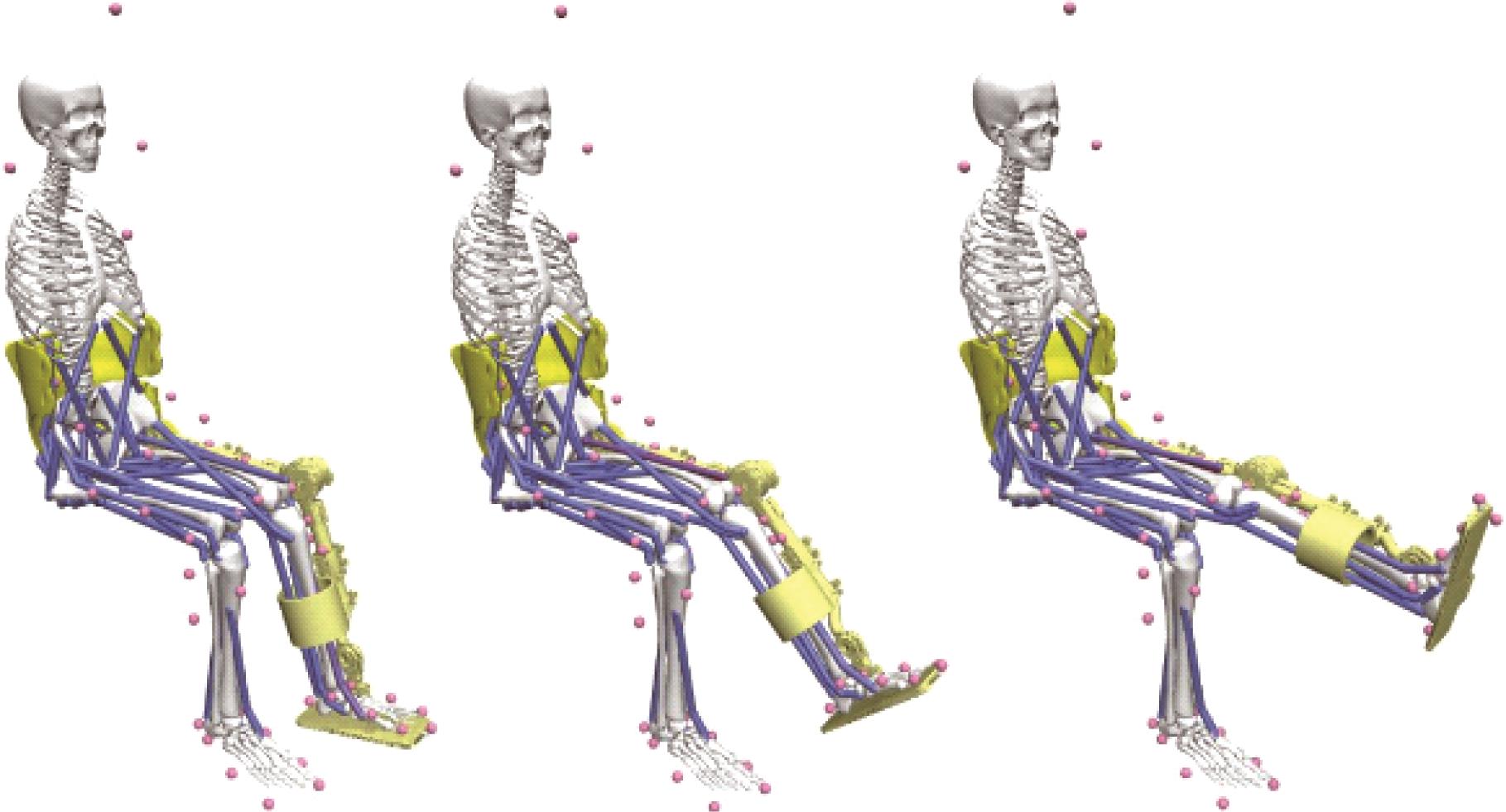
图9. 坐姿下单腿摆动的人机耦合模型
Fig.9. Human-machine model with one leg swinging in a sitting position