In response to the issue of target disappearing when a mobile robot is following a target, a robot target following system based on visual tracking and autonomous navigation is proposed. The robot following problem was divided into two cases: regular following when the target was within the robot's field of view, and autonomous navigation after the target disappeared. For the former case, the target's motion state was predicted using a Kalman filter, appearance features were extracted using a pedestrian re-identification network, and target tracking was performed by fusing motion information and appearance features using data association fusion. Servo control was then applied for following the target. For the latter case, an autonomous navigation algorithm was adopted based on the relative position between the historical target and the robot. The robot moved to the history position of the target and searched the target, aiming to increase the success rate of the target following. Evaluations were conducted on the OTB100 benchmark dataset and a target following test dataset which was in robot application scenarios. Experiments were performed on a mobile robot platform. The results showed that the robot could follow the target in the environment with different lighting conditions and more background pedestrians, which verified the robustness and effectiveness of the proposed algorithm, and it could meet the real-time requirement. The research results can provide reference for research on the problem of robot refollowing after the target disappears.
ZHANG Rui, JIANG Wanyue. Mobile robot target following system based on visual tracking and autonomous navigation. Chinese Journal of Engineering Design[J], 2023, 30(6): 687-696 doi:10.3785/j.issn.1006-754X.2023.03.178
目前已有多种基于传感器的目标跟随方法[3-4]。通过激光雷达、相机、UWB(ultra wide band,超宽带)技术等实现对目标位置的感知,并根据目标位置设计机器人导航与控制算法。如:Ferrer等[5]通过激光雷达对目标进行定位,利用SFM(social force mode,社会力模型)量化行人运动意图,使机器人能够并排跟随目标行人;Chung等[6]通过激光点云获得行人腿部模型,分析了行人腿部运动,得到目标行人的位置,但仅凭点云数据很难区分不同的行人;Ling等[7]提出了一种通过检测反射材料来跟随行人的方法。
在视觉跟随及视觉目标跟踪方面,也已有不少的研究成果。视觉跟随研究方面:Cheng等[8]提出了一种通过检测目标行人的上身和脚实现跟随的方法;Sun等[9]开发了一种基于手势的方法,机器人可以根据手势完成不同的任务;Koide等[10]提出了一种结合身高和颜色特征来识别目标行人的方法,然而这些身体信息很容易受到目标行人姿势和步态的干扰;余铎等[11]通过将快速判别尺度空间的算法与卡尔曼滤波算法进行切换来实现稳定跟随;万琴等[12]采用改进的卡尔曼滤波器来预测目标的状态,并通过数据关联进行目标匹配,利用多目标跟踪并通过标定目标人的ID(identity document,身份标识号)来跟随。视觉目标跟踪研究方面:Henriques等[13-14]提出了CSK(circulant structure of tracking-by-detection with kernels,核检测跟踪的循环结构)算法,利用循环矩阵进行图像密集采样,提高了跟踪精度,随后又拓展了多特征通道,提出了KCF(kernelized correlation filters,核相关滤波)算法;Danelljan等[15]优化了平移检测和尺度检测滤波,提出了FDSST(fast discriminative scale space tracking,快速判别尺度空间跟踪)算法;Bertinetto等[16]将孪生网络应用于跟踪,提出了SiamFC(fully-convolutional Siamese network,全卷积孪生网络)算法;Li等[17-18]在SiamFC算法的基础上加入区域候选网络,提出了SiamRPN(Siamese region proposal network,孪生候选区域生成网络)算法,后又提出了SiamRPN++算法,采用空间感知采样策略,在目标跟踪时采用深层网络进行特征提取。上述研究考虑了人的外观特征,而当场景中有外观相似的行人时则不易区分,在机器人跟随目标行人时会出现跟踪失败的问题。
在实验中手动框选跟踪目标是不方便的,因此在运行跟踪算法前加入人脸识别,且只在第1帧或者前几帧进行人脸识别,一旦检测到目标进入机器人视野,则进行目标跟踪。采用已经训练好的检测模型YOLOv5s作为行人检测器[19]。该模型运行速度快、识别精度高,可以很好地检测到目标行人。人脸识别算法采用人脸识别库face_recognition,其在人脸数据集Labeled Faces in the Wild测试中有99.38%的准确率[20]。
在第1帧中,将人脸识别框和YOLOv5s检测框进行IOU(intersection over union,交并比)匹配,IOU距离最小的检测框为目标框。IOU距离di(1)可以表示为:
式中:,,其元素分别为人脸检测框和第i个行人检测框的左上角以及右下角在图像坐标系中的坐标。
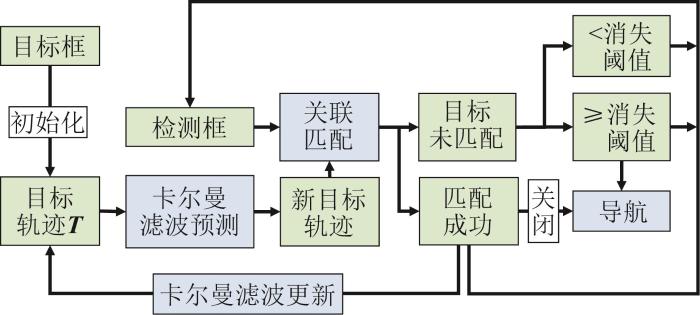
2.2 目标跟踪
目标跟踪流程如图3所示。当目标出现时,基于上述的目标检测与识别方法可以得到目标框;提取目标框的图像特征以及位置信息,将该目标框初始化为一个目标轨迹,其中包含目标边界框中心位置、目标边界框宽高比r、高度h、当前轨迹经过卡尔曼滤波器预测的次数s以及目标的外观特征库 F;在第t帧,通过卡尔曼滤波器预测当前帧的目标位置,并将预测次数s加1,将YOLOv5s检测到的行人框与预测后的轨迹进行关联匹配;若匹配目标成功,更新目标轨迹的外观特征库 F 、卡尔曼滤波的参数,并将卡尔曼预测次数s置零;若目标匹配不成功,目标轨迹 T 不进行更新,当预测次数大于消失阈值,认定目标长时间消失,则进行自主导航;当检测框与目标轨迹再次成功匹配后,关闭自主导航。
... 目前已有多种基于传感器的目标跟随方法[3-4].通过激光雷达、相机、UWB(ultra wide band,超宽带)技术等实现对目标位置的感知,并根据目标位置设计机器人导航与控制算法.如:Ferrer等[5]通过激光雷达对目标进行定位,利用SFM(social force mode,社会力模型)量化行人运动意图,使机器人能够并排跟随目标行人;Chung等[6]通过激光点云获得行人腿部模型,分析了行人腿部运动,得到目标行人的位置,但仅凭点云数据很难区分不同的行人;Ling等[7]提出了一种通过检测反射材料来跟随行人的方法. ...
基于改进弹簧模型的移动机器人柔顺跟随行人方法
1
2021
... 目前已有多种基于传感器的目标跟随方法[3-4].通过激光雷达、相机、UWB(ultra wide band,超宽带)技术等实现对目标位置的感知,并根据目标位置设计机器人导航与控制算法.如:Ferrer等[5]通过激光雷达对目标进行定位,利用SFM(social force mode,社会力模型)量化行人运动意图,使机器人能够并排跟随目标行人;Chung等[6]通过激光点云获得行人腿部模型,分析了行人腿部运动,得到目标行人的位置,但仅凭点云数据很难区分不同的行人;Ling等[7]提出了一种通过检测反射材料来跟随行人的方法. ...
基于环形红外阵列的移动机器人自动跟随系统
1
2022
... 目前已有多种基于传感器的目标跟随方法[3-4].通过激光雷达、相机、UWB(ultra wide band,超宽带)技术等实现对目标位置的感知,并根据目标位置设计机器人导航与控制算法.如:Ferrer等[5]通过激光雷达对目标进行定位,利用SFM(social force mode,社会力模型)量化行人运动意图,使机器人能够并排跟随目标行人;Chung等[6]通过激光点云获得行人腿部模型,分析了行人腿部运动,得到目标行人的位置,但仅凭点云数据很难区分不同的行人;Ling等[7]提出了一种通过检测反射材料来跟随行人的方法. ...
基于环形红外阵列的移动机器人自动跟随系统
1
2022
... 目前已有多种基于传感器的目标跟随方法[3-4].通过激光雷达、相机、UWB(ultra wide band,超宽带)技术等实现对目标位置的感知,并根据目标位置设计机器人导航与控制算法.如:Ferrer等[5]通过激光雷达对目标进行定位,利用SFM(social force mode,社会力模型)量化行人运动意图,使机器人能够并排跟随目标行人;Chung等[6]通过激光点云获得行人腿部模型,分析了行人腿部运动,得到目标行人的位置,但仅凭点云数据很难区分不同的行人;Ling等[7]提出了一种通过检测反射材料来跟随行人的方法. ...
Robot social-aware navigation framework to accompany people walking side-by-side
1
2016
... 目前已有多种基于传感器的目标跟随方法[3-4].通过激光雷达、相机、UWB(ultra wide band,超宽带)技术等实现对目标位置的感知,并根据目标位置设计机器人导航与控制算法.如:Ferrer等[5]通过激光雷达对目标进行定位,利用SFM(social force mode,社会力模型)量化行人运动意图,使机器人能够并排跟随目标行人;Chung等[6]通过激光点云获得行人腿部模型,分析了行人腿部运动,得到目标行人的位置,但仅凭点云数据很难区分不同的行人;Ling等[7]提出了一种通过检测反射材料来跟随行人的方法. ...
The detection and following of human legs through inductive approaches for a mobile robot with a single laser range finder
1
2012
... 目前已有多种基于传感器的目标跟随方法[3-4].通过激光雷达、相机、UWB(ultra wide band,超宽带)技术等实现对目标位置的感知,并根据目标位置设计机器人导航与控制算法.如:Ferrer等[5]通过激光雷达对目标进行定位,利用SFM(social force mode,社会力模型)量化行人运动意图,使机器人能够并排跟随目标行人;Chung等[6]通过激光点云获得行人腿部模型,分析了行人腿部运动,得到目标行人的位置,但仅凭点云数据很难区分不同的行人;Ling等[7]提出了一种通过检测反射材料来跟随行人的方法. ...
An outdoor human-tracking method based on 3D lidar for quadruped robots
1
2
... 目前已有多种基于传感器的目标跟随方法[3-4].通过激光雷达、相机、UWB(ultra wide band,超宽带)技术等实现对目标位置的感知,并根据目标位置设计机器人导航与控制算法.如:Ferrer等[5]通过激光雷达对目标进行定位,利用SFM(social force mode,社会力模型)量化行人运动意图,使机器人能够并排跟随目标行人;Chung等[6]通过激光点云获得行人腿部模型,分析了行人腿部运动,得到目标行人的位置,但仅凭点云数据很难区分不同的行人;Ling等[7]提出了一种通过检测反射材料来跟随行人的方法. ...
Person-following for telepresence robots using web cameras
1
2019
... 在视觉跟随及视觉目标跟踪方面,也已有不少的研究成果.视觉跟随研究方面:Cheng等[8]提出了一种通过检测目标行人的上身和脚实现跟随的方法;Sun等[9]开发了一种基于手势的方法,机器人可以根据手势完成不同的任务;Koide等[10]提出了一种结合身高和颜色特征来识别目标行人的方法,然而这些身体信息很容易受到目标行人姿势和步态的干扰;余铎等[11]通过将快速判别尺度空间的算法与卡尔曼滤波算法进行切换来实现稳定跟随;万琴等[12]采用改进的卡尔曼滤波器来预测目标的状态,并通过数据关联进行目标匹配,利用多目标跟踪并通过标定目标人的ID(identity document,身份标识号)来跟随.视觉目标跟踪研究方面:Henriques等[13-14]提出了CSK(circulant structure of tracking-by-detection with kernels,核检测跟踪的循环结构)算法,利用循环矩阵进行图像密集采样,提高了跟踪精度,随后又拓展了多特征通道,提出了KCF(kernelized correlation filters,核相关滤波)算法;Danelljan等[15]优化了平移检测和尺度检测滤波,提出了FDSST(fast discriminative scale space tracking,快速判别尺度空间跟踪)算法;Bertinetto等[16]将孪生网络应用于跟踪,提出了SiamFC(fully-convolutional Siamese network,全卷积孪生网络)算法;Li等[17-18]在SiamFC算法的基础上加入区域候选网络,提出了SiamRPN(Siamese region proposal network,孪生候选区域生成网络)算法,后又提出了SiamRPN++算法,采用空间感知采样策略,在目标跟踪时采用深层网络进行特征提取.上述研究考虑了人的外观特征,而当场景中有外观相似的行人时则不易区分,在机器人跟随目标行人时会出现跟踪失败的问题. ...
Gesture-based piloting of an aerial robot using monocular vision
1
2
... 在视觉跟随及视觉目标跟踪方面,也已有不少的研究成果.视觉跟随研究方面:Cheng等[8]提出了一种通过检测目标行人的上身和脚实现跟随的方法;Sun等[9]开发了一种基于手势的方法,机器人可以根据手势完成不同的任务;Koide等[10]提出了一种结合身高和颜色特征来识别目标行人的方法,然而这些身体信息很容易受到目标行人姿势和步态的干扰;余铎等[11]通过将快速判别尺度空间的算法与卡尔曼滤波算法进行切换来实现稳定跟随;万琴等[12]采用改进的卡尔曼滤波器来预测目标的状态,并通过数据关联进行目标匹配,利用多目标跟踪并通过标定目标人的ID(identity document,身份标识号)来跟随.视觉目标跟踪研究方面:Henriques等[13-14]提出了CSK(circulant structure of tracking-by-detection with kernels,核检测跟踪的循环结构)算法,利用循环矩阵进行图像密集采样,提高了跟踪精度,随后又拓展了多特征通道,提出了KCF(kernelized correlation filters,核相关滤波)算法;Danelljan等[15]优化了平移检测和尺度检测滤波,提出了FDSST(fast discriminative scale space tracking,快速判别尺度空间跟踪)算法;Bertinetto等[16]将孪生网络应用于跟踪,提出了SiamFC(fully-convolutional Siamese network,全卷积孪生网络)算法;Li等[17-18]在SiamFC算法的基础上加入区域候选网络,提出了SiamRPN(Siamese region proposal network,孪生候选区域生成网络)算法,后又提出了SiamRPN++算法,采用空间感知采样策略,在目标跟踪时采用深层网络进行特征提取.上述研究考虑了人的外观特征,而当场景中有外观相似的行人时则不易区分,在机器人跟随目标行人时会出现跟踪失败的问题. ...
Identification of a specific person using color, height, and gait features for a person following robot
1
2016
... 在视觉跟随及视觉目标跟踪方面,也已有不少的研究成果.视觉跟随研究方面:Cheng等[8]提出了一种通过检测目标行人的上身和脚实现跟随的方法;Sun等[9]开发了一种基于手势的方法,机器人可以根据手势完成不同的任务;Koide等[10]提出了一种结合身高和颜色特征来识别目标行人的方法,然而这些身体信息很容易受到目标行人姿势和步态的干扰;余铎等[11]通过将快速判别尺度空间的算法与卡尔曼滤波算法进行切换来实现稳定跟随;万琴等[12]采用改进的卡尔曼滤波器来预测目标的状态,并通过数据关联进行目标匹配,利用多目标跟踪并通过标定目标人的ID(identity document,身份标识号)来跟随.视觉目标跟踪研究方面:Henriques等[13-14]提出了CSK(circulant structure of tracking-by-detection with kernels,核检测跟踪的循环结构)算法,利用循环矩阵进行图像密集采样,提高了跟踪精度,随后又拓展了多特征通道,提出了KCF(kernelized correlation filters,核相关滤波)算法;Danelljan等[15]优化了平移检测和尺度检测滤波,提出了FDSST(fast discriminative scale space tracking,快速判别尺度空间跟踪)算法;Bertinetto等[16]将孪生网络应用于跟踪,提出了SiamFC(fully-convolutional Siamese network,全卷积孪生网络)算法;Li等[17-18]在SiamFC算法的基础上加入区域候选网络,提出了SiamRPN(Siamese region proposal network,孪生候选区域生成网络)算法,后又提出了SiamRPN++算法,采用空间感知采样策略,在目标跟踪时采用深层网络进行特征提取.上述研究考虑了人的外观特征,而当场景中有外观相似的行人时则不易区分,在机器人跟随目标行人时会出现跟踪失败的问题. ...
基于视觉的移动机器人目标跟踪方法
1
2019
... 在视觉跟随及视觉目标跟踪方面,也已有不少的研究成果.视觉跟随研究方面:Cheng等[8]提出了一种通过检测目标行人的上身和脚实现跟随的方法;Sun等[9]开发了一种基于手势的方法,机器人可以根据手势完成不同的任务;Koide等[10]提出了一种结合身高和颜色特征来识别目标行人的方法,然而这些身体信息很容易受到目标行人姿势和步态的干扰;余铎等[11]通过将快速判别尺度空间的算法与卡尔曼滤波算法进行切换来实现稳定跟随;万琴等[12]采用改进的卡尔曼滤波器来预测目标的状态,并通过数据关联进行目标匹配,利用多目标跟踪并通过标定目标人的ID(identity document,身份标识号)来跟随.视觉目标跟踪研究方面:Henriques等[13-14]提出了CSK(circulant structure of tracking-by-detection with kernels,核检测跟踪的循环结构)算法,利用循环矩阵进行图像密集采样,提高了跟踪精度,随后又拓展了多特征通道,提出了KCF(kernelized correlation filters,核相关滤波)算法;Danelljan等[15]优化了平移检测和尺度检测滤波,提出了FDSST(fast discriminative scale space tracking,快速判别尺度空间跟踪)算法;Bertinetto等[16]将孪生网络应用于跟踪,提出了SiamFC(fully-convolutional Siamese network,全卷积孪生网络)算法;Li等[17-18]在SiamFC算法的基础上加入区域候选网络,提出了SiamRPN(Siamese region proposal network,孪生候选区域生成网络)算法,后又提出了SiamRPN++算法,采用空间感知采样策略,在目标跟踪时采用深层网络进行特征提取.上述研究考虑了人的外观特征,而当场景中有外观相似的行人时则不易区分,在机器人跟随目标行人时会出现跟踪失败的问题. ...
基于视觉的移动机器人目标跟踪方法
1
2019
... 在视觉跟随及视觉目标跟踪方面,也已有不少的研究成果.视觉跟随研究方面:Cheng等[8]提出了一种通过检测目标行人的上身和脚实现跟随的方法;Sun等[9]开发了一种基于手势的方法,机器人可以根据手势完成不同的任务;Koide等[10]提出了一种结合身高和颜色特征来识别目标行人的方法,然而这些身体信息很容易受到目标行人姿势和步态的干扰;余铎等[11]通过将快速判别尺度空间的算法与卡尔曼滤波算法进行切换来实现稳定跟随;万琴等[12]采用改进的卡尔曼滤波器来预测目标的状态,并通过数据关联进行目标匹配,利用多目标跟踪并通过标定目标人的ID(identity document,身份标识号)来跟随.视觉目标跟踪研究方面:Henriques等[13-14]提出了CSK(circulant structure of tracking-by-detection with kernels,核检测跟踪的循环结构)算法,利用循环矩阵进行图像密集采样,提高了跟踪精度,随后又拓展了多特征通道,提出了KCF(kernelized correlation filters,核相关滤波)算法;Danelljan等[15]优化了平移检测和尺度检测滤波,提出了FDSST(fast discriminative scale space tracking,快速判别尺度空间跟踪)算法;Bertinetto等[16]将孪生网络应用于跟踪,提出了SiamFC(fully-convolutional Siamese network,全卷积孪生网络)算法;Li等[17-18]在SiamFC算法的基础上加入区域候选网络,提出了SiamRPN(Siamese region proposal network,孪生候选区域生成网络)算法,后又提出了SiamRPN++算法,采用空间感知采样策略,在目标跟踪时采用深层网络进行特征提取.上述研究考虑了人的外观特征,而当场景中有外观相似的行人时则不易区分,在机器人跟随目标行人时会出现跟踪失败的问题. ...
基于改进YOLOX的移动机器人目标跟随方法
1
2023
... 在视觉跟随及视觉目标跟踪方面,也已有不少的研究成果.视觉跟随研究方面:Cheng等[8]提出了一种通过检测目标行人的上身和脚实现跟随的方法;Sun等[9]开发了一种基于手势的方法,机器人可以根据手势完成不同的任务;Koide等[10]提出了一种结合身高和颜色特征来识别目标行人的方法,然而这些身体信息很容易受到目标行人姿势和步态的干扰;余铎等[11]通过将快速判别尺度空间的算法与卡尔曼滤波算法进行切换来实现稳定跟随;万琴等[12]采用改进的卡尔曼滤波器来预测目标的状态,并通过数据关联进行目标匹配,利用多目标跟踪并通过标定目标人的ID(identity document,身份标识号)来跟随.视觉目标跟踪研究方面:Henriques等[13-14]提出了CSK(circulant structure of tracking-by-detection with kernels,核检测跟踪的循环结构)算法,利用循环矩阵进行图像密集采样,提高了跟踪精度,随后又拓展了多特征通道,提出了KCF(kernelized correlation filters,核相关滤波)算法;Danelljan等[15]优化了平移检测和尺度检测滤波,提出了FDSST(fast discriminative scale space tracking,快速判别尺度空间跟踪)算法;Bertinetto等[16]将孪生网络应用于跟踪,提出了SiamFC(fully-convolutional Siamese network,全卷积孪生网络)算法;Li等[17-18]在SiamFC算法的基础上加入区域候选网络,提出了SiamRPN(Siamese region proposal network,孪生候选区域生成网络)算法,后又提出了SiamRPN++算法,采用空间感知采样策略,在目标跟踪时采用深层网络进行特征提取.上述研究考虑了人的外观特征,而当场景中有外观相似的行人时则不易区分,在机器人跟随目标行人时会出现跟踪失败的问题. ...
基于改进YOLOX的移动机器人目标跟随方法
1
2023
... 在视觉跟随及视觉目标跟踪方面,也已有不少的研究成果.视觉跟随研究方面:Cheng等[8]提出了一种通过检测目标行人的上身和脚实现跟随的方法;Sun等[9]开发了一种基于手势的方法,机器人可以根据手势完成不同的任务;Koide等[10]提出了一种结合身高和颜色特征来识别目标行人的方法,然而这些身体信息很容易受到目标行人姿势和步态的干扰;余铎等[11]通过将快速判别尺度空间的算法与卡尔曼滤波算法进行切换来实现稳定跟随;万琴等[12]采用改进的卡尔曼滤波器来预测目标的状态,并通过数据关联进行目标匹配,利用多目标跟踪并通过标定目标人的ID(identity document,身份标识号)来跟随.视觉目标跟踪研究方面:Henriques等[13-14]提出了CSK(circulant structure of tracking-by-detection with kernels,核检测跟踪的循环结构)算法,利用循环矩阵进行图像密集采样,提高了跟踪精度,随后又拓展了多特征通道,提出了KCF(kernelized correlation filters,核相关滤波)算法;Danelljan等[15]优化了平移检测和尺度检测滤波,提出了FDSST(fast discriminative scale space tracking,快速判别尺度空间跟踪)算法;Bertinetto等[16]将孪生网络应用于跟踪,提出了SiamFC(fully-convolutional Siamese network,全卷积孪生网络)算法;Li等[17-18]在SiamFC算法的基础上加入区域候选网络,提出了SiamRPN(Siamese region proposal network,孪生候选区域生成网络)算法,后又提出了SiamRPN++算法,采用空间感知采样策略,在目标跟踪时采用深层网络进行特征提取.上述研究考虑了人的外观特征,而当场景中有外观相似的行人时则不易区分,在机器人跟随目标行人时会出现跟踪失败的问题. ...
Exploiting the circulant structure of tracking-by-detection with kernels
1
13
... 在视觉跟随及视觉目标跟踪方面,也已有不少的研究成果.视觉跟随研究方面:Cheng等[8]提出了一种通过检测目标行人的上身和脚实现跟随的方法;Sun等[9]开发了一种基于手势的方法,机器人可以根据手势完成不同的任务;Koide等[10]提出了一种结合身高和颜色特征来识别目标行人的方法,然而这些身体信息很容易受到目标行人姿势和步态的干扰;余铎等[11]通过将快速判别尺度空间的算法与卡尔曼滤波算法进行切换来实现稳定跟随;万琴等[12]采用改进的卡尔曼滤波器来预测目标的状态,并通过数据关联进行目标匹配,利用多目标跟踪并通过标定目标人的ID(identity document,身份标识号)来跟随.视觉目标跟踪研究方面:Henriques等[13-14]提出了CSK(circulant structure of tracking-by-detection with kernels,核检测跟踪的循环结构)算法,利用循环矩阵进行图像密集采样,提高了跟踪精度,随后又拓展了多特征通道,提出了KCF(kernelized correlation filters,核相关滤波)算法;Danelljan等[15]优化了平移检测和尺度检测滤波,提出了FDSST(fast discriminative scale space tracking,快速判别尺度空间跟踪)算法;Bertinetto等[16]将孪生网络应用于跟踪,提出了SiamFC(fully-convolutional Siamese network,全卷积孪生网络)算法;Li等[17-18]在SiamFC算法的基础上加入区域候选网络,提出了SiamRPN(Siamese region proposal network,孪生候选区域生成网络)算法,后又提出了SiamRPN++算法,采用空间感知采样策略,在目标跟踪时采用深层网络进行特征提取.上述研究考虑了人的外观特征,而当场景中有外观相似的行人时则不易区分,在机器人跟随目标行人时会出现跟踪失败的问题. ...
High-speed tracking with kernelized correlation filters
2
2015
... 在视觉跟随及视觉目标跟踪方面,也已有不少的研究成果.视觉跟随研究方面:Cheng等[8]提出了一种通过检测目标行人的上身和脚实现跟随的方法;Sun等[9]开发了一种基于手势的方法,机器人可以根据手势完成不同的任务;Koide等[10]提出了一种结合身高和颜色特征来识别目标行人的方法,然而这些身体信息很容易受到目标行人姿势和步态的干扰;余铎等[11]通过将快速判别尺度空间的算法与卡尔曼滤波算法进行切换来实现稳定跟随;万琴等[12]采用改进的卡尔曼滤波器来预测目标的状态,并通过数据关联进行目标匹配,利用多目标跟踪并通过标定目标人的ID(identity document,身份标识号)来跟随.视觉目标跟踪研究方面:Henriques等[13-14]提出了CSK(circulant structure of tracking-by-detection with kernels,核检测跟踪的循环结构)算法,利用循环矩阵进行图像密集采样,提高了跟踪精度,随后又拓展了多特征通道,提出了KCF(kernelized correlation filters,核相关滤波)算法;Danelljan等[15]优化了平移检测和尺度检测滤波,提出了FDSST(fast discriminative scale space tracking,快速判别尺度空间跟踪)算法;Bertinetto等[16]将孪生网络应用于跟踪,提出了SiamFC(fully-convolutional Siamese network,全卷积孪生网络)算法;Li等[17-18]在SiamFC算法的基础上加入区域候选网络,提出了SiamRPN(Siamese region proposal network,孪生候选区域生成网络)算法,后又提出了SiamRPN++算法,采用空间感知采样策略,在目标跟踪时采用深层网络进行特征提取.上述研究考虑了人的外观特征,而当场景中有外观相似的行人时则不易区分,在机器人跟随目标行人时会出现跟踪失败的问题. ...
... 在视觉跟随及视觉目标跟踪方面,也已有不少的研究成果.视觉跟随研究方面:Cheng等[8]提出了一种通过检测目标行人的上身和脚实现跟随的方法;Sun等[9]开发了一种基于手势的方法,机器人可以根据手势完成不同的任务;Koide等[10]提出了一种结合身高和颜色特征来识别目标行人的方法,然而这些身体信息很容易受到目标行人姿势和步态的干扰;余铎等[11]通过将快速判别尺度空间的算法与卡尔曼滤波算法进行切换来实现稳定跟随;万琴等[12]采用改进的卡尔曼滤波器来预测目标的状态,并通过数据关联进行目标匹配,利用多目标跟踪并通过标定目标人的ID(identity document,身份标识号)来跟随.视觉目标跟踪研究方面:Henriques等[13-14]提出了CSK(circulant structure of tracking-by-detection with kernels,核检测跟踪的循环结构)算法,利用循环矩阵进行图像密集采样,提高了跟踪精度,随后又拓展了多特征通道,提出了KCF(kernelized correlation filters,核相关滤波)算法;Danelljan等[15]优化了平移检测和尺度检测滤波,提出了FDSST(fast discriminative scale space tracking,快速判别尺度空间跟踪)算法;Bertinetto等[16]将孪生网络应用于跟踪,提出了SiamFC(fully-convolutional Siamese network,全卷积孪生网络)算法;Li等[17-18]在SiamFC算法的基础上加入区域候选网络,提出了SiamRPN(Siamese region proposal network,孪生候选区域生成网络)算法,后又提出了SiamRPN++算法,采用空间感知采样策略,在目标跟踪时采用深层网络进行特征提取.上述研究考虑了人的外观特征,而当场景中有外观相似的行人时则不易区分,在机器人跟随目标行人时会出现跟踪失败的问题. ...
Fully-convolutional Siamese networks for object tracking
2
2016
... 在视觉跟随及视觉目标跟踪方面,也已有不少的研究成果.视觉跟随研究方面:Cheng等[8]提出了一种通过检测目标行人的上身和脚实现跟随的方法;Sun等[9]开发了一种基于手势的方法,机器人可以根据手势完成不同的任务;Koide等[10]提出了一种结合身高和颜色特征来识别目标行人的方法,然而这些身体信息很容易受到目标行人姿势和步态的干扰;余铎等[11]通过将快速判别尺度空间的算法与卡尔曼滤波算法进行切换来实现稳定跟随;万琴等[12]采用改进的卡尔曼滤波器来预测目标的状态,并通过数据关联进行目标匹配,利用多目标跟踪并通过标定目标人的ID(identity document,身份标识号)来跟随.视觉目标跟踪研究方面:Henriques等[13-14]提出了CSK(circulant structure of tracking-by-detection with kernels,核检测跟踪的循环结构)算法,利用循环矩阵进行图像密集采样,提高了跟踪精度,随后又拓展了多特征通道,提出了KCF(kernelized correlation filters,核相关滤波)算法;Danelljan等[15]优化了平移检测和尺度检测滤波,提出了FDSST(fast discriminative scale space tracking,快速判别尺度空间跟踪)算法;Bertinetto等[16]将孪生网络应用于跟踪,提出了SiamFC(fully-convolutional Siamese network,全卷积孪生网络)算法;Li等[17-18]在SiamFC算法的基础上加入区域候选网络,提出了SiamRPN(Siamese region proposal network,孪生候选区域生成网络)算法,后又提出了SiamRPN++算法,采用空间感知采样策略,在目标跟踪时采用深层网络进行特征提取.上述研究考虑了人的外观特征,而当场景中有外观相似的行人时则不易区分,在机器人跟随目标行人时会出现跟踪失败的问题. ...
High performance visual tracking with Siamese region proposal network
2
2018
... 在视觉跟随及视觉目标跟踪方面,也已有不少的研究成果.视觉跟随研究方面:Cheng等[8]提出了一种通过检测目标行人的上身和脚实现跟随的方法;Sun等[9]开发了一种基于手势的方法,机器人可以根据手势完成不同的任务;Koide等[10]提出了一种结合身高和颜色特征来识别目标行人的方法,然而这些身体信息很容易受到目标行人姿势和步态的干扰;余铎等[11]通过将快速判别尺度空间的算法与卡尔曼滤波算法进行切换来实现稳定跟随;万琴等[12]采用改进的卡尔曼滤波器来预测目标的状态,并通过数据关联进行目标匹配,利用多目标跟踪并通过标定目标人的ID(identity document,身份标识号)来跟随.视觉目标跟踪研究方面:Henriques等[13-14]提出了CSK(circulant structure of tracking-by-detection with kernels,核检测跟踪的循环结构)算法,利用循环矩阵进行图像密集采样,提高了跟踪精度,随后又拓展了多特征通道,提出了KCF(kernelized correlation filters,核相关滤波)算法;Danelljan等[15]优化了平移检测和尺度检测滤波,提出了FDSST(fast discriminative scale space tracking,快速判别尺度空间跟踪)算法;Bertinetto等[16]将孪生网络应用于跟踪,提出了SiamFC(fully-convolutional Siamese network,全卷积孪生网络)算法;Li等[17-18]在SiamFC算法的基础上加入区域候选网络,提出了SiamRPN(Siamese region proposal network,孪生候选区域生成网络)算法,后又提出了SiamRPN++算法,采用空间感知采样策略,在目标跟踪时采用深层网络进行特征提取.上述研究考虑了人的外观特征,而当场景中有外观相似的行人时则不易区分,在机器人跟随目标行人时会出现跟踪失败的问题. ...
SiamRPN++: evolution of Siamese visual tracking with very deep networks
1
2019
... 在视觉跟随及视觉目标跟踪方面,也已有不少的研究成果.视觉跟随研究方面:Cheng等[8]提出了一种通过检测目标行人的上身和脚实现跟随的方法;Sun等[9]开发了一种基于手势的方法,机器人可以根据手势完成不同的任务;Koide等[10]提出了一种结合身高和颜色特征来识别目标行人的方法,然而这些身体信息很容易受到目标行人姿势和步态的干扰;余铎等[11]通过将快速判别尺度空间的算法与卡尔曼滤波算法进行切换来实现稳定跟随;万琴等[12]采用改进的卡尔曼滤波器来预测目标的状态,并通过数据关联进行目标匹配,利用多目标跟踪并通过标定目标人的ID(identity document,身份标识号)来跟随.视觉目标跟踪研究方面:Henriques等[13-14]提出了CSK(circulant structure of tracking-by-detection with kernels,核检测跟踪的循环结构)算法,利用循环矩阵进行图像密集采样,提高了跟踪精度,随后又拓展了多特征通道,提出了KCF(kernelized correlation filters,核相关滤波)算法;Danelljan等[15]优化了平移检测和尺度检测滤波,提出了FDSST(fast discriminative scale space tracking,快速判别尺度空间跟踪)算法;Bertinetto等[16]将孪生网络应用于跟踪,提出了SiamFC(fully-convolutional Siamese network,全卷积孪生网络)算法;Li等[17-18]在SiamFC算法的基础上加入区域候选网络,提出了SiamRPN(Siamese region proposal network,孪生候选区域生成网络)算法,后又提出了SiamRPN++算法,采用空间感知采样策略,在目标跟踪时采用深层网络进行特征提取.上述研究考虑了人的外观特征,而当场景中有外观相似的行人时则不易区分,在机器人跟随目标行人时会出现跟踪失败的问题. ...
Yolov5
1
... 在实验中手动框选跟踪目标是不方便的,因此在运行跟踪算法前加入人脸识别,且只在第1帧或者前几帧进行人脸识别,一旦检测到目标进入机器人视野,则进行目标跟踪.采用已经训练好的检测模型YOLOv5s作为行人检测器[19].该模型运行速度快、识别精度高,可以很好地检测到目标行人.人脸识别算法采用人脸识别库face_recognition,其在人脸数据集Labeled Faces in the Wild测试中有99.38%的准确率[20]. ...
Welcome to the computer vision lab
1
... 在实验中手动框选跟踪目标是不方便的,因此在运行跟踪算法前加入人脸识别,且只在第1帧或者前几帧进行人脸识别,一旦检测到目标进入机器人视野,则进行目标跟踪.采用已经训练好的检测模型YOLOv5s作为行人检测器[19].该模型运行速度快、识别精度高,可以很好地检测到目标行人.人脸识别算法采用人脸识别库face_recognition,其在人脸数据集Labeled Faces in the Wild测试中有99.38%的准确率[20]. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}