随着科技的发展,智能机器人正加速融入工业生产和日常生活。六维力传感器作为实现智能机器人“触觉”的重要感知元件,得到了世界各国学者的广泛关注[1 ] 。现阶段,六维力传感器主要包括电容型、压电型、光电型和应变片型等几种类型。但由于受到机械结构原理、机械加工误差、应变片粘贴位置以及系统标定方式的影响,任何类型的六维力传感器均会不可避免地产生耦合误差[2 -4 ] 。在此前的研究中,减小耦合误差的方式主要有改变结构和材料、改善加工工艺等,即从根源上进行结构解耦。积木拼装式六维力传感器是最早开发的、最具有代表性的结构解耦式六维力传感器,其通过多个应变检测模块实现对不同力的检测,从而达到结构解耦的目的。但由于加工装配难度过大以及测量精度不理想,积木拼装式六维力传感器并没有得到广泛应用。与结构解耦相对应的是软件解耦,软件解耦是指采用合适的算法推导出六维力传感器输入值与输出值的关系。实现软件解耦的方法有2种:第1种是线性解耦,最常用的是最小二乘法[5 ] ;第2种是维间解耦,适用于线性解耦无法解决问题的场合,最常用的是机器学习算法,包括BP(back propagation,反向传播)神经网络[6 ] 、随机森林[7 ] 和极限学习机[8 ] 等。综上可知,结构解耦虽然原理简单,但会增加加工难度和制造成本;软件解耦虽能够有效降低制造成本,但运算复杂,易出现病态矩阵,导致精度降低。因此,设计一种运算简单、精确度高的六维力传感器解耦算法具有重要意义。
为此,笔者首先对六维力传感器的线性解耦算法进行研究,并对其进行耦合误差分析。然后,在线性解耦算法的基础上,提出基于多项式拟合的六维力传感器解耦算法。最后,基于正交并联六维力传感器的标定实验数据,对2种解耦算法进行误差分析,旨在为提高六维力传感器的精度提供新思路。
1 六维力传感器耦合分析及其耦合模型构建
1.1 耦合分析
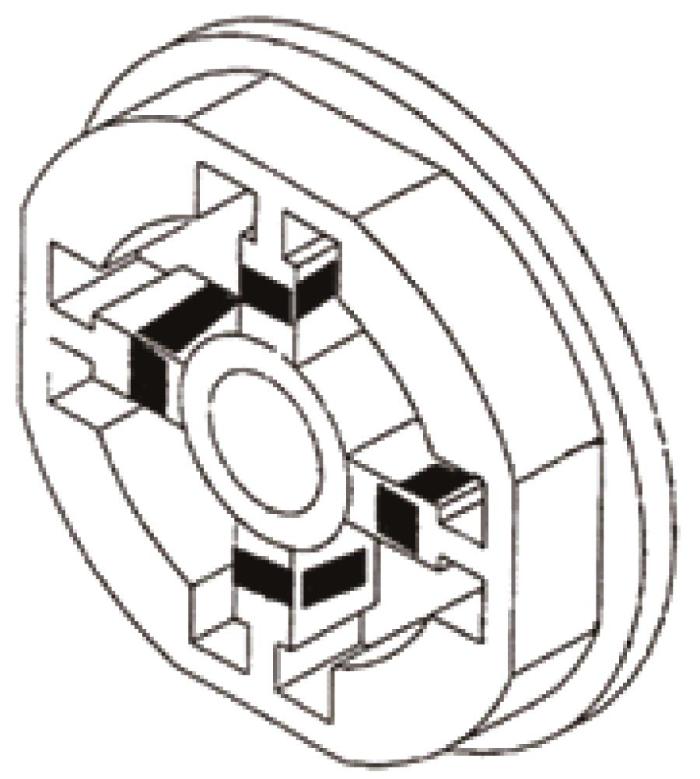
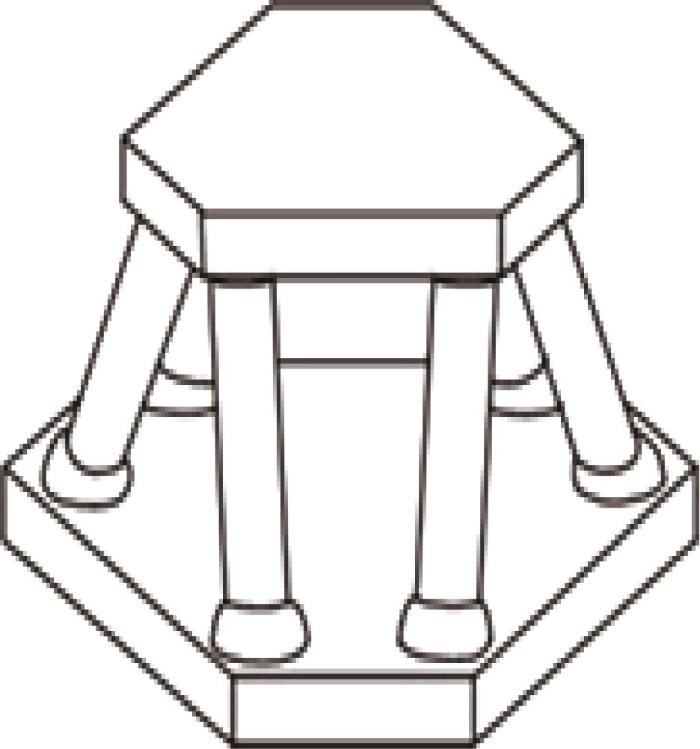
现阶段,六维力传感器的结构主要分为一体式和并联式。一体式六维力传感器由金属材料经一次加工形成,通过布置在空间内不同方位的应变片组合来确定六维外力。一体式六维力传感器的结构形式有多种[9 -13 ] ,其中十字梁结构的六维力传感器(见图1 )最为常用。但是,由于一体式六维力传感器的结构具有整体性,当对其某一方向施加外力时,会引起其他方向力的耦合,即形成维间耦合误差,无法实现完全解耦。并联式六维力传感器采用球铰连接的方式,其测力分支可看作只承受轴向力的二力杆。由机构的静力学分析可知,当将外力施加到并联式六维力传感器上时,其测量分支上的敏感元件之间不存在应力耦合,巧妙地实现了结构解耦。但在实际应用中,完全理想的球铰不易实现,通常采用传统球副代替,但传统球副存在加工误差、理论间隙和摩擦转矩等,导致并联式六维力传感器也存在维间耦合。此外,并联式六维力传感器的自身结构也是引起维间耦合的重要因素。如图2 所示的Stewart并联结构六维力传感器,其所受的任何方向的力或力矩均由6个测力分支测得,当所受外力为单方向时,6个测力分支均只承受轴向力。结合一阶静力学矩阵可知,该六维力传感器在所有方向上均存在测量值,即自身结构造成了耦合误差。
图1
图1
十字梁结构六维力传感器
Fig.1
Six-dimensional force sensor with cross beam structure
图2
图2
Stewart并联结构六维力传感器
Fig.2
Stewart six-dimensional force sensor with parallel structure
1.2 耦合模型构建
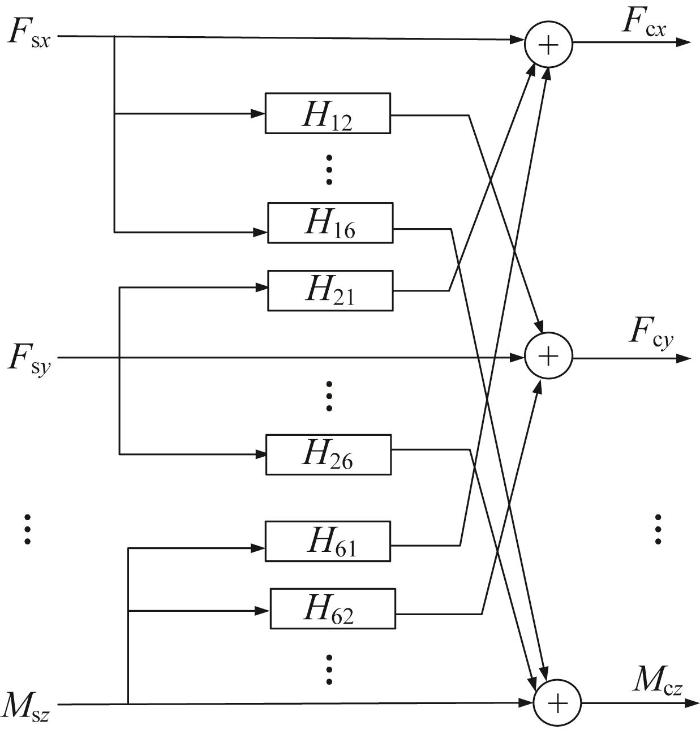
根据上文分析,在理想情况下,当六维力传感器只有单方向力/力矩输入时,其输出应只在对应方向上存在。但由于存在维间耦合,使得六维力传感器在其他方向上也存在输出。根据六维力传感器的耦合关系,得到其输入-输出耦合模型,如图3 所示。
图3
图3
六维力传感器的输入-输出耦合模型
Fig.3
Input-output coupling model of six-dimensional force sensor
根据图3 ,利用矩阵形式表示六维力传感器的耦合关系,可得:
F c = H F s (1)
F c = F c x F c y F c z M c x M c y M c z T
H = 1 H 12 H 13 H 14 H 15 H 16 H 21 1 H 23 H 24 H 25 H 26 H 31 H 32 1 H 34 H 35 H 36 H 41 H 42 H 43 1 H 45 H 46 H 51 H 52 H 53 H 54 1 H 56 H 61 H 62 H 63 H 64 H 65 1 T
F s = F s x F s y F s z M s x M s y M s z T
式中:F s F s i i = 1 , 2 , … , 6 i F c F c j j = 1 , 2 , … , 6 j H i j i ≠ j i j
为简化上述数学模型,将任意输出量F c j j = 1 , 2 , … , 6 F s i i = 1 , 2 , … , 6
F c j = F s i + ∑ i = 1 , i ≠ j 6 H i j F s i , j = 1 , 2 , … , 6 (2)
式(2)中H i j F s i
H i j F s i = a 0 + a 1 F s i + a 2 F s i 2 + ⋯ + a n F s i n (3)
由式(3)可知,确定六维力传感器耦合函数的问题可转换为确定其多项式阶数和各阶系数的问题。
2 六维力传感器的线性解耦算法
线性解耦算法是最常见的六维力传感器解耦算法,其实现前提为:1)假定六维力传感器系统为线性系统;2)六维力传感器所受的广义外力必须可分解为3个方向上的力/力矩分量;3)六维力传感器输出的电压信号可以相互累加。线性解耦算法的工作原理为:通过对输入量和输出量进行线性拟合,进而得到标定矩阵[14 -15 ] 。采用矩阵形式可表示为:
F s = G U
式中: G U U = U 1 U 2 ⋯ U m T
G = F s U -
G = F s U T ( U U T ) - 1
式(6)中G 6 × m
进而得到六维力传感器所产生的电压信号 U F c
F c = F s U T U U T - 1 U
由于存在加工误差以及零点漂移等因素的影响,六维力传感器的输入-输出关系往往不是线性关系,可能是多项式函数关系。因此,六维力传感器的线性解耦算法存在很大的耦合误差。
3 基于多项式拟合的六维力传感器解耦算法
以提高六维力传感器的精度为目的,提出了基于多项式拟合的解耦算法。为了消除六维力传感器工作时零值点不为0的现象对其精度的影响[16 ] ,通过调控将其空载状态下的输出值设为0。此时,耦合矩阵H
H i j F s i = a 1 F s i + a 2 F s i 2 + ⋯ + a n F s i n
由式(8)可知,该耦合函数可直接从一阶自变量的系数开始考虑。任何一种六维力传感器均可通过调控来实现空载状态下的输出值为0。本文基于多项式拟合的解耦算法的前提为空载状态下输出值为0。
3.1 具体解耦过程
在空载状态下输出值为0的情况下,当输入量F s x H i j i ≠ 1 F s x F c j j = 1 , 2 , … , 6 F s x F c j
F c j = H 1 j F s i , j = 2 , 3 , 4 , 5 , 6 (9)
在相同条件下,当输入量F s y H i j i ≠ 2 F s y F c j j = 1 , 2 , … , 6 F s y F c j
F c j = H 2 j F s i , j = 1 , 3 , 4 , 5 , 6 (10)
同理,分别令输入量F s z M s x M s y M s z H i j F s i H 式(4),可求解得到解耦后的各维输出量,表示为:
Δ F c j = F c j - ∑ i = 1 , i ≠ j 6 H i j F s i , j = 1 , 2 , … , 6 (11)
3.2 数值算例
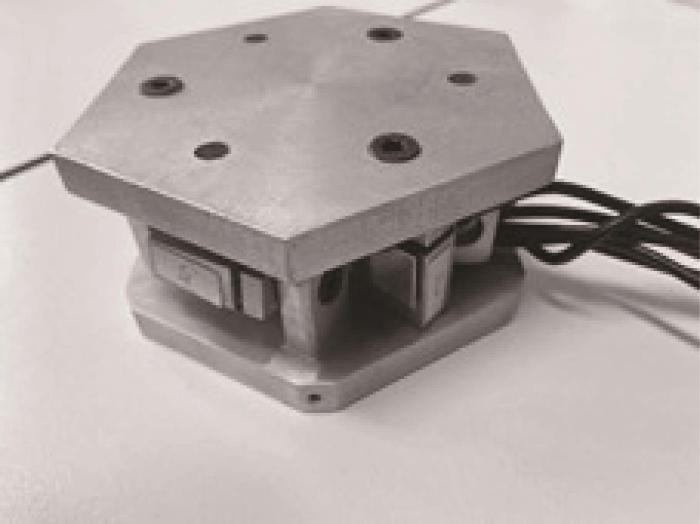
以图4 所示的正交并联六维力传感器为研究对象开展标定实验,并利用线性解耦算法和基于多项式拟合的解耦算法进行解耦求解。
图4
图4
正交并联六维力传感器
Fig.4
Orthogonal parallel six-dimensional force sensor
在正交并联六维力传感器的各方向测量范围内分别取10个加载点进行标定实验,得到其各测量分支的输出电压并代入式(6),即得到其标定矩阵G
G = - 0.117 1 - 0.315 2 - 0.298 3 0.021 2 - 0.356 4 - 0.348 6 0.041 6 0.206 5 - 0.132 4 0.056 9 0.051 9 - 0.011 5 0.844 7 0.688 4 0.655 7 - 0.026 8 - 0.140 3 - 0.159 8 - 0.009 4 0.037 6 - 0.047 9 - 0.012 7 - 0.010 8 0.002 7 - 0.010 2 0.052 4 0.049 0 - 0.003 2 0.044 3 0.043 5 - 0.010 1 - 0.006 2 - 0.006 1 - 0.013 2 0.003 7 - 0.009 4
对正交并联六维力传感器施加不同的力F s x x 正方向的力),通过标定实验得到一组数据,如表1 所示。从表1 中可以看出,当六维力传感器的x 正方向有输入力F s x
根据表1 所示的标定数据,采用基于多项式拟合的六维力传感器解耦算法进行解耦求解。因篇幅限制,本文只给出施加标准力F s x F s y
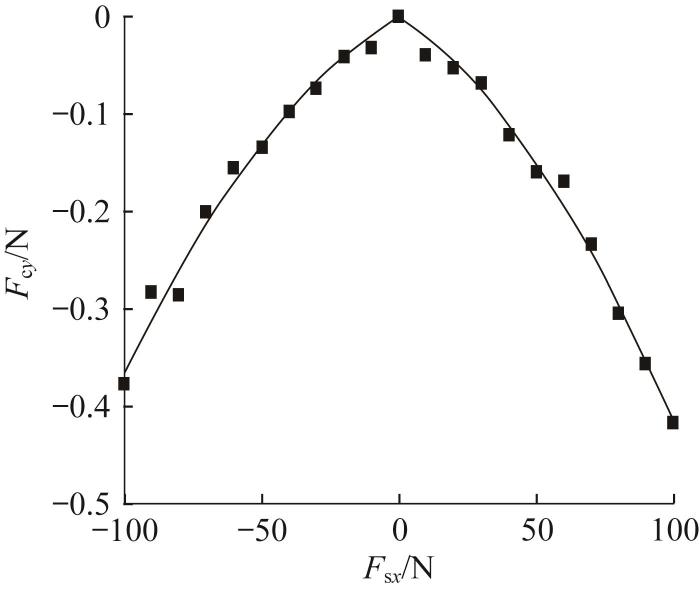
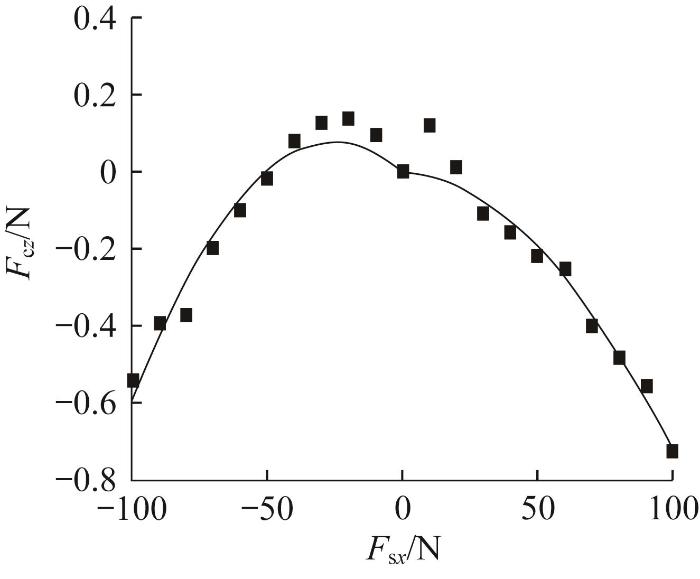
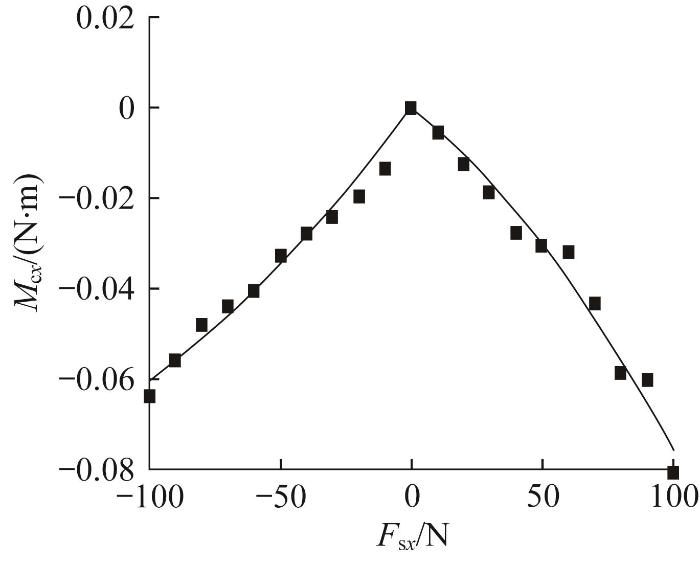
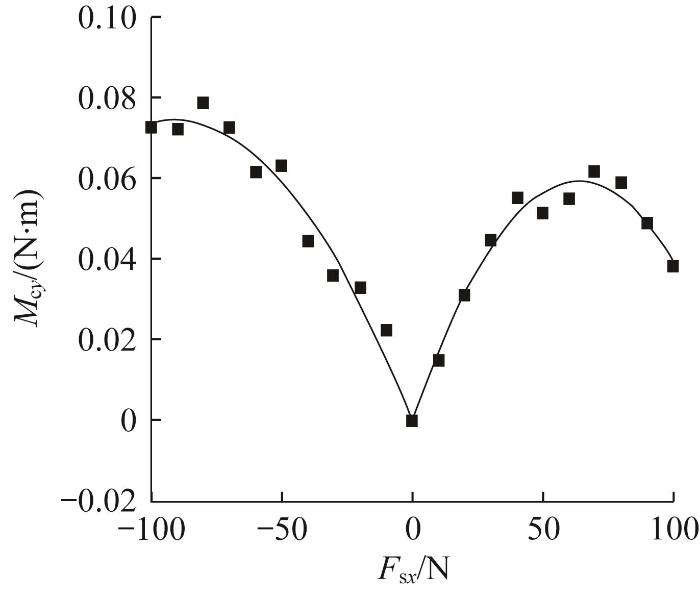
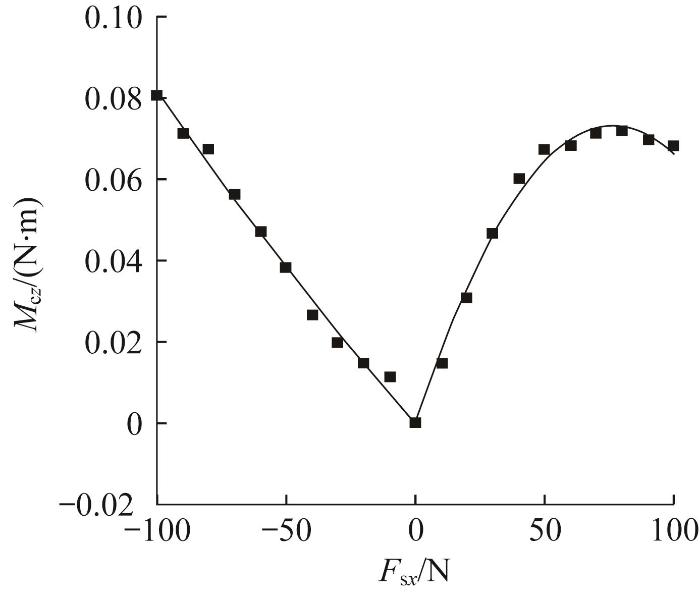
对x 正方向施加标准力F s x F c y F c z M c x M c y M c z 图5 至图9 所示。各输出量F c y F c z M c x M c y M c z F s x
F c y = - 0.001 84 F s x - 0.000 02 F s x 2 , F s x ≥ 0 - 0.001 62 F s x - 0.000 02 F s x 2 , F s x < 0
F c z = 0.000 56 F s x + 0.000 07 F s x 2 , F s x ≥ 0 0.006 12 F s x + 0.000 12 F s x 2 , F s x < 0
M c x = 0.000 452 10 F s x + 0.000 003 F s x 2 , F s x ≥ 0 0.000 787 F s x + 0.000 002 F s x 2 , F s x < 0
M c y = 0.001 870 F s x + 0.000 015 F s x 2 , F s x ≥ 0 0.001 613 0 F s x + 0.000 000 9 F s x 2 , F s x < 0
M c z = 0.001 910 F s x - 0.000 013 F s x 2 , F s x ≥ 0 - 0.000 710 F s x + 0.000 001 3 F s x 2 , F s x < 0
图5
图5
F c y F s x
Fig.5
Coupling relationship between F c y F s x
图6
图6
F c z 与 F s x
Fig.6
Coupling relationship between F c z F s x
图7
图7
M c x 与 F s x
Fig.7
Coupling relationship between M c x F s x
图8
图8
M c y 与 F s x
Fig.8
Coupling relationship between M c y F s x
图9
图9
M c z 与 F s x
Fig.9
Coupling relationship between M c z F s x
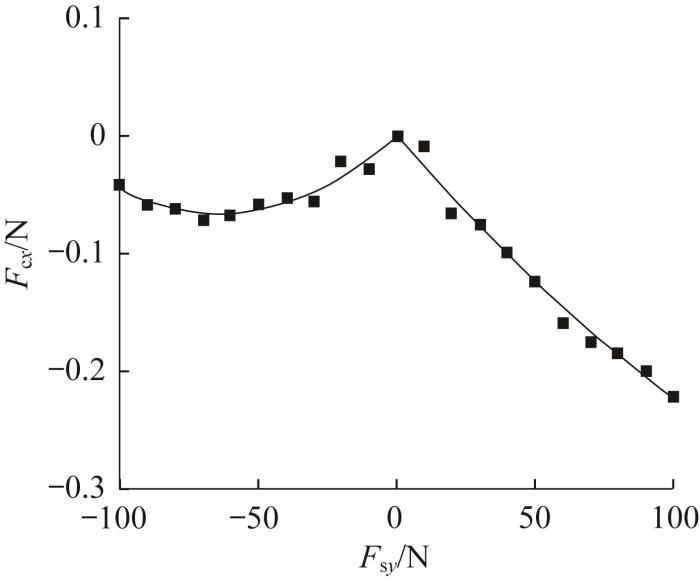
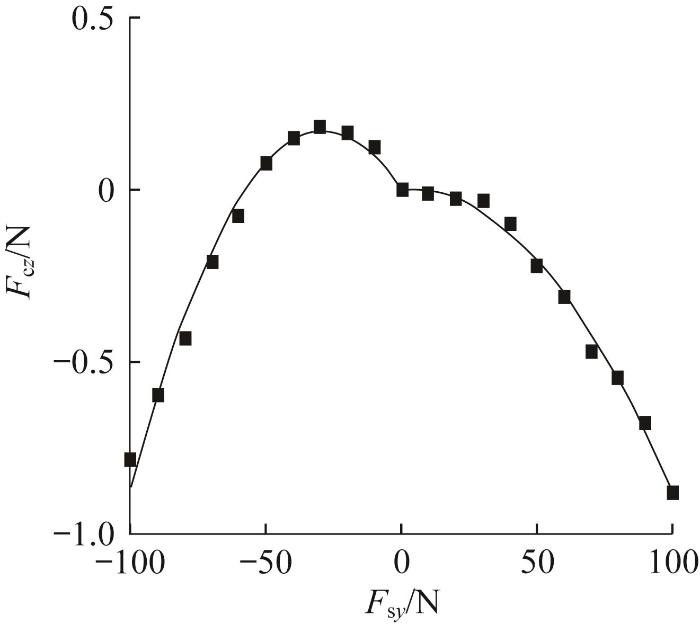
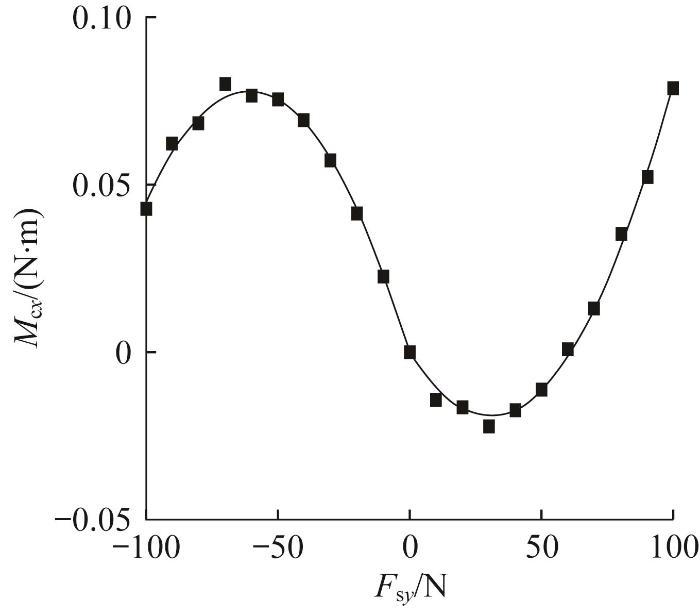
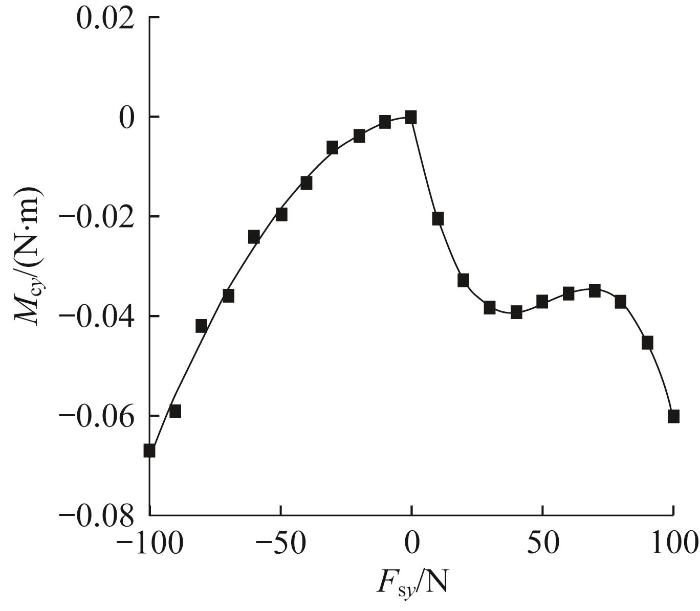
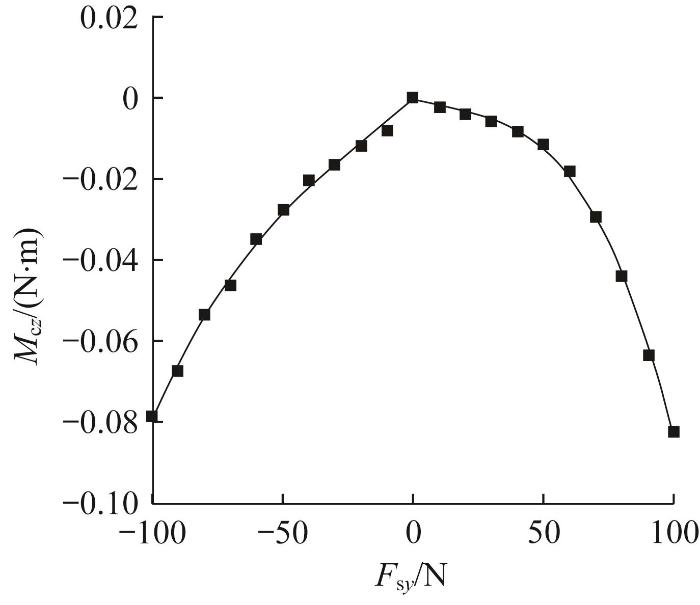
对y 正 F s y F c x F c z M c x M c y M c z 图10 至图14
图10
图10
F c x F s y
Fig.10
Coupling relationship between F c x F s y
图11
图11
F c z F s y
Fig.11
Coupling relationship between F c z F s y
图12
图12
M c x F s y
Fig.12
Coupling relationship between M c x F s y
图13
图13
M c y F s y
Fig.13
Coupling relationship between M c y F s y
图14
图14
M c z F s y
Fig.14
Coupling relationship between M c z F s y
所示。各输出量F c x F c z M c x M c y M c z F s y
F c x = - 0.002 690 0 F s y - 0.000 004 7 F s y 2 , F s y ≥ 0 0.002 060 F s y + 0.000 016 F s y 2 , F s y < 0
F c z = 0.000 56 F s y - 0.000 093 F s y 2 , F s y ≥ 0 - 0.011 780 F s y - 0.000 207 F s y 2 , F s y < 0
M c x = - 0.001 240 F s y + 0.000 021 F s y 2 , F s y ≥ 0 - 0.002 570 F s y - 0.000 021 F s y 2 , F s y < 0
M c y = - 0.002 54 F s y + 0.000 052 3 F s y 2 + 0.000 000 33 F s y 3 , F s y ≥ 0 0.000 054 8 F s y - 0.000 006 3 F s y 2 , F s y < 0
M c z = - 0.002 54 F s y + 0.000 052 3 F s y 2 + 0.000 000 33 F s y 3 , F s y ≥ 0 0.000 585 F s y - 0.000 002 7 F s y 2 + 0.000 000 000 49 F s y 3 , F s y < 0
4 基于不同解耦算法的六维力传感器误差分析
为了确定基于多项式拟合的六维力传感器解耦算法的优劣程度,根据上述解耦结果建立误差矩阵,以进行精度评价。本文主要针对线性度误差和最大耦合误差展开分析。
分别将式(7)、式(11)对应的矩阵形式与式(4)相减并对各元素取绝对值,可得:
Δ L 1 = Δ L F x 1 Δ L F y 1 Δ L F z 1 Δ L M x 1 Δ L M y 1 Δ L M z 1 T
Δ L 2 = Δ L F x 2 Δ L F y 2 Δ L F z 2 Δ L M x 2 Δ L M y 2 Δ L M z 2 T
式(12)和式(13)即为基于2种解耦算法的六维力传感器检测力与实际施加力的偏差,即线性度误差;将各方向力的最大偏差与该方向力最大量程之比作为各方向的最大耦合误差。以施加 F s x
E L = m a x Δ L F x F x M m a x Δ L F y F y M m a x Δ L F z F z M m a x Δ L M x M x M m a x Δ L M y M y M m a x Δ L M z M z M T
式中:m a x ( ) F x M 、 F y M 、 ⋯ 、 M z M
E L 1 = 0.041 7 0.008 3 0.250 9 0.082 0 0.072 5 0.063 6 0.039 4 0.092 5 0.047 1 0.004 8 0.159 9 0.127 2 0.121 5 0.022 3 0.309 5 0.446 5 0.475 4 0.986 7 0.005 5 0.041 0 0.032 8 0.011 4 0.054 6 0.006 1 0.014 5 0.024 3 0.011 9 0.006 8 0.008 4 0.001 1 0.014 6 0.010 7 0.006 9 0.031 3 0.027 2 0.022 6
E L 2 = 0.040 3 0.013 4 0.001 0 0.011 3 0.010 2 0.002 3 0.018 7 0.090 4 0.005 1 0.000 7 0.047 2 0.009 4 0.095 3 0.010 9 0.298 4 0.001 8 0.041 0 0.045 3 0.005 0 0.005 5 0.000 9 0.010 8 0.007 9 0.001 5 0.005 9 0.000 3 0.001 3 0.000 5 0.007 6 0.003 1 0.004 2 0.000 8 0.000 4 0.001 2 0.002 5 0.018 9
2种解耦算法的误差分析结果如表2 所示。对比表2 中的各组数据可知,由于正交并联六维力传感器的线性度误差较小,因此2种解耦方法均具有良好的解耦性能,即解耦算法对线性度误差的影响较小(2种算法对应的线性度误差最大仅相差0.111个百分点)。此外,相较于线性解耦,多项式拟合解耦使六维力传感器各方向的最大耦合误差显著减小,尤其是Fz ,减小了8.914个百分点。综合来看,基于多项式拟合的解耦算法更能抑制六维力传感器耦合误差的影响,有效地提高了其精度。
5 结 论
本文首先分析了六维力传感器耦合误差的产生原因,并得到了其耦合模型;然后研究了六维力传感器的线性解耦算法,并在此基础上提出了基于多项式拟合的解耦算法;最后对正交并联六维力传感器进行标定实验,并分别用2种解耦算法进行求解。结果表明:基于多项式拟合的解耦算法更能减小六维力传感器自身的耦合误差,有效提高了其精度并解决了零点漂移所带来的影响。
参考文献
View Option
[2]
PALLI G MORIELLO L SCARCIA U et al Development of an optoelectronic 6-axis force/torque sensor for robotic applications
[J]. Sensors & Actuators A: Physical , 2014 , 220 : 333 -346 .
[本文引用: 1]
[3]
CIRILLO A CIRILLO P DE MARIA G et al Control of linear and rotational slippage based on six-axis force/tactile sensor
[C]//IEEE International Conference on Robotics & Automation (ICRA) , Singapore, May 29-Jun . 3 , 2017 .
[4]
OZAWA R ARIMOTO S YOSHIDA M et al Stable grasping and relative angle control of an object by dual finger robots without object sensing
[C]//IEEE International Conference on Robotics and Automation , New Orleans, LA, Apr. 26-May 1 , 2004 .
[本文引用: 1]
[8]
LIANG Q DAN Z SONG Q et al Design and fabrication of a six-dimensional wrist force/torque sensor based on E-type membranes compared to cross beams
[J]. Measurement , 2010 , 43 (10 ): 1702 -1719 .
[本文引用: 1]
[9]
SUN Y J LIU Y W ZOU T et al Design and optimization of a novel six-axis force/torque sensor for space robot
[J]. Measurement , 2015 , 65 : 135 -148 .
[本文引用: 1]
[10]
MERLET J P Parallel robots [M]. 2nd ed . Berlin : Springer , 2006 : 265 -266 .
[11]
LIANG Q K ZHANG D CHI Z Z et al Six-DOF micro-manipulator based on compliant parallel mechanism with integrated force sensor
[J]. Robotics and Computer-Integrated Manufacturing , 2011 , 27 (1 ): 124 -134 .
[12]
YAO J T LI L J XU Y D et al Redundant-parallel structure six-axis force sensor and hyperstatic static mapping analytical analysis
[J]. Engineering Mechanics , 2014 , 31 (10 ): 205 -211 .
DOI:10.6052/j.issn.1000-4750.2013.04.0336
[13]
LIANG Q K CHENG L K LONG J Y et al A force/position measurement method of surgical forceps based on fiber Bragg gratings
[J]. IEEE Sensors Journal , 2023 , 23 (1 ): 363 -373 .
[本文引用: 1]
[15]
刘琬钰 ,王志军 ,田雪珂 ,等 基于时间函数的并联六维力传感器量程设计
[J].传感器与微系统 ,2016 ,35 (8 ):80 -83 .
[本文引用: 1]
LIU W Y WANG Z J TIAN X K et al Design of parallel six-axis force sensor measuring range based on time function
[J]. Transducer and Microsystem Technologies , 2016 , 35 (8 ): 80 -83 .
[本文引用: 1]
[16]
SONG Y Y WU J LIU Z L et al Similitude analysis method of the dynamics of a hybrid spray-painting robot considering electro-mechanical coupling effect
[J]. IEEE/ASME Transactions on Mechatronics , 2021 , 26 (6 ): 2986 -2997 .
[本文引用: 1]
Stewart六维力传感器解耦算法优化
1
2018
... 随着科技的发展,智能机器人正加速融入工业生产和日常生活.六维力传感器作为实现智能机器人“触觉”的重要感知元件,得到了世界各国学者的广泛关注[1 ] .现阶段,六维力传感器主要包括电容型、压电型、光电型和应变片型等几种类型.但由于受到机械结构原理、机械加工误差、应变片粘贴位置以及系统标定方式的影响,任何类型的六维力传感器均会不可避免地产生耦合误差[2 -4 ] .在此前的研究中,减小耦合误差的方式主要有改变结构和材料、改善加工工艺等,即从根源上进行结构解耦.积木拼装式六维力传感器是最早开发的、最具有代表性的结构解耦式六维力传感器,其通过多个应变检测模块实现对不同力的检测,从而达到结构解耦的目的.但由于加工装配难度过大以及测量精度不理想,积木拼装式六维力传感器并没有得到广泛应用.与结构解耦相对应的是软件解耦,软件解耦是指采用合适的算法推导出六维力传感器输入值与输出值的关系.实现软件解耦的方法有2种:第1种是线性解耦,最常用的是最小二乘法[5 ] ;第2种是维间解耦,适用于线性解耦无法解决问题的场合,最常用的是机器学习算法,包括BP(back propagation,反向传播)神经网络[6 ] 、随机森林[7 ] 和极限学习机[8 ] 等.综上可知,结构解耦虽然原理简单,但会增加加工难度和制造成本;软件解耦虽能够有效降低制造成本,但运算复杂,易出现病态矩阵,导致精度降低.因此,设计一种运算简单、精确度高的六维力传感器解耦算法具有重要意义. ...
Stewart六维力传感器解耦算法优化
1
2018
... 随着科技的发展,智能机器人正加速融入工业生产和日常生活.六维力传感器作为实现智能机器人“触觉”的重要感知元件,得到了世界各国学者的广泛关注[1 ] .现阶段,六维力传感器主要包括电容型、压电型、光电型和应变片型等几种类型.但由于受到机械结构原理、机械加工误差、应变片粘贴位置以及系统标定方式的影响,任何类型的六维力传感器均会不可避免地产生耦合误差[2 -4 ] .在此前的研究中,减小耦合误差的方式主要有改变结构和材料、改善加工工艺等,即从根源上进行结构解耦.积木拼装式六维力传感器是最早开发的、最具有代表性的结构解耦式六维力传感器,其通过多个应变检测模块实现对不同力的检测,从而达到结构解耦的目的.但由于加工装配难度过大以及测量精度不理想,积木拼装式六维力传感器并没有得到广泛应用.与结构解耦相对应的是软件解耦,软件解耦是指采用合适的算法推导出六维力传感器输入值与输出值的关系.实现软件解耦的方法有2种:第1种是线性解耦,最常用的是最小二乘法[5 ] ;第2种是维间解耦,适用于线性解耦无法解决问题的场合,最常用的是机器学习算法,包括BP(back propagation,反向传播)神经网络[6 ] 、随机森林[7 ] 和极限学习机[8 ] 等.综上可知,结构解耦虽然原理简单,但会增加加工难度和制造成本;软件解耦虽能够有效降低制造成本,但运算复杂,易出现病态矩阵,导致精度降低.因此,设计一种运算简单、精确度高的六维力传感器解耦算法具有重要意义. ...
Development of an optoelectronic 6-axis force/torque sensor for robotic applications
1
2014
... 随着科技的发展,智能机器人正加速融入工业生产和日常生活.六维力传感器作为实现智能机器人“触觉”的重要感知元件,得到了世界各国学者的广泛关注[1 ] .现阶段,六维力传感器主要包括电容型、压电型、光电型和应变片型等几种类型.但由于受到机械结构原理、机械加工误差、应变片粘贴位置以及系统标定方式的影响,任何类型的六维力传感器均会不可避免地产生耦合误差[2 -4 ] .在此前的研究中,减小耦合误差的方式主要有改变结构和材料、改善加工工艺等,即从根源上进行结构解耦.积木拼装式六维力传感器是最早开发的、最具有代表性的结构解耦式六维力传感器,其通过多个应变检测模块实现对不同力的检测,从而达到结构解耦的目的.但由于加工装配难度过大以及测量精度不理想,积木拼装式六维力传感器并没有得到广泛应用.与结构解耦相对应的是软件解耦,软件解耦是指采用合适的算法推导出六维力传感器输入值与输出值的关系.实现软件解耦的方法有2种:第1种是线性解耦,最常用的是最小二乘法[5 ] ;第2种是维间解耦,适用于线性解耦无法解决问题的场合,最常用的是机器学习算法,包括BP(back propagation,反向传播)神经网络[6 ] 、随机森林[7 ] 和极限学习机[8 ] 等.综上可知,结构解耦虽然原理简单,但会增加加工难度和制造成本;软件解耦虽能够有效降低制造成本,但运算复杂,易出现病态矩阵,导致精度降低.因此,设计一种运算简单、精确度高的六维力传感器解耦算法具有重要意义. ...
Control of linear and rotational slippage based on six-axis force/tactile sensor
0
3
Stable grasping and relative angle control of an object by dual finger robots without object sensing
1
2004
... 随着科技的发展,智能机器人正加速融入工业生产和日常生活.六维力传感器作为实现智能机器人“触觉”的重要感知元件,得到了世界各国学者的广泛关注[1 ] .现阶段,六维力传感器主要包括电容型、压电型、光电型和应变片型等几种类型.但由于受到机械结构原理、机械加工误差、应变片粘贴位置以及系统标定方式的影响,任何类型的六维力传感器均会不可避免地产生耦合误差[2 -4 ] .在此前的研究中,减小耦合误差的方式主要有改变结构和材料、改善加工工艺等,即从根源上进行结构解耦.积木拼装式六维力传感器是最早开发的、最具有代表性的结构解耦式六维力传感器,其通过多个应变检测模块实现对不同力的检测,从而达到结构解耦的目的.但由于加工装配难度过大以及测量精度不理想,积木拼装式六维力传感器并没有得到广泛应用.与结构解耦相对应的是软件解耦,软件解耦是指采用合适的算法推导出六维力传感器输入值与输出值的关系.实现软件解耦的方法有2种:第1种是线性解耦,最常用的是最小二乘法[5 ] ;第2种是维间解耦,适用于线性解耦无法解决问题的场合,最常用的是机器学习算法,包括BP(back propagation,反向传播)神经网络[6 ] 、随机森林[7 ] 和极限学习机[8 ] 等.综上可知,结构解耦虽然原理简单,但会增加加工难度和制造成本;软件解耦虽能够有效降低制造成本,但运算复杂,易出现病态矩阵,导致精度降低.因此,设计一种运算简单、精确度高的六维力传感器解耦算法具有重要意义. ...
一种用于MEMS检测的无耦合六维力传感器的研制
1
2003
... 随着科技的发展,智能机器人正加速融入工业生产和日常生活.六维力传感器作为实现智能机器人“触觉”的重要感知元件,得到了世界各国学者的广泛关注[1 ] .现阶段,六维力传感器主要包括电容型、压电型、光电型和应变片型等几种类型.但由于受到机械结构原理、机械加工误差、应变片粘贴位置以及系统标定方式的影响,任何类型的六维力传感器均会不可避免地产生耦合误差[2 -4 ] .在此前的研究中,减小耦合误差的方式主要有改变结构和材料、改善加工工艺等,即从根源上进行结构解耦.积木拼装式六维力传感器是最早开发的、最具有代表性的结构解耦式六维力传感器,其通过多个应变检测模块实现对不同力的检测,从而达到结构解耦的目的.但由于加工装配难度过大以及测量精度不理想,积木拼装式六维力传感器并没有得到广泛应用.与结构解耦相对应的是软件解耦,软件解耦是指采用合适的算法推导出六维力传感器输入值与输出值的关系.实现软件解耦的方法有2种:第1种是线性解耦,最常用的是最小二乘法[5 ] ;第2种是维间解耦,适用于线性解耦无法解决问题的场合,最常用的是机器学习算法,包括BP(back propagation,反向传播)神经网络[6 ] 、随机森林[7 ] 和极限学习机[8 ] 等.综上可知,结构解耦虽然原理简单,但会增加加工难度和制造成本;软件解耦虽能够有效降低制造成本,但运算复杂,易出现病态矩阵,导致精度降低.因此,设计一种运算简单、精确度高的六维力传感器解耦算法具有重要意义. ...
一种用于MEMS检测的无耦合六维力传感器的研制
1
2003
... 随着科技的发展,智能机器人正加速融入工业生产和日常生活.六维力传感器作为实现智能机器人“触觉”的重要感知元件,得到了世界各国学者的广泛关注[1 ] .现阶段,六维力传感器主要包括电容型、压电型、光电型和应变片型等几种类型.但由于受到机械结构原理、机械加工误差、应变片粘贴位置以及系统标定方式的影响,任何类型的六维力传感器均会不可避免地产生耦合误差[2 -4 ] .在此前的研究中,减小耦合误差的方式主要有改变结构和材料、改善加工工艺等,即从根源上进行结构解耦.积木拼装式六维力传感器是最早开发的、最具有代表性的结构解耦式六维力传感器,其通过多个应变检测模块实现对不同力的检测,从而达到结构解耦的目的.但由于加工装配难度过大以及测量精度不理想,积木拼装式六维力传感器并没有得到广泛应用.与结构解耦相对应的是软件解耦,软件解耦是指采用合适的算法推导出六维力传感器输入值与输出值的关系.实现软件解耦的方法有2种:第1种是线性解耦,最常用的是最小二乘法[5 ] ;第2种是维间解耦,适用于线性解耦无法解决问题的场合,最常用的是机器学习算法,包括BP(back propagation,反向传播)神经网络[6 ] 、随机森林[7 ] 和极限学习机[8 ] 等.综上可知,结构解耦虽然原理简单,但会增加加工难度和制造成本;软件解耦虽能够有效降低制造成本,但运算复杂,易出现病态矩阵,导致精度降低.因此,设计一种运算简单、精确度高的六维力传感器解耦算法具有重要意义. ...
Stewart式六维力传感器轻量化设计
1
2022
... 随着科技的发展,智能机器人正加速融入工业生产和日常生活.六维力传感器作为实现智能机器人“触觉”的重要感知元件,得到了世界各国学者的广泛关注[1 ] .现阶段,六维力传感器主要包括电容型、压电型、光电型和应变片型等几种类型.但由于受到机械结构原理、机械加工误差、应变片粘贴位置以及系统标定方式的影响,任何类型的六维力传感器均会不可避免地产生耦合误差[2 -4 ] .在此前的研究中,减小耦合误差的方式主要有改变结构和材料、改善加工工艺等,即从根源上进行结构解耦.积木拼装式六维力传感器是最早开发的、最具有代表性的结构解耦式六维力传感器,其通过多个应变检测模块实现对不同力的检测,从而达到结构解耦的目的.但由于加工装配难度过大以及测量精度不理想,积木拼装式六维力传感器并没有得到广泛应用.与结构解耦相对应的是软件解耦,软件解耦是指采用合适的算法推导出六维力传感器输入值与输出值的关系.实现软件解耦的方法有2种:第1种是线性解耦,最常用的是最小二乘法[5 ] ;第2种是维间解耦,适用于线性解耦无法解决问题的场合,最常用的是机器学习算法,包括BP(back propagation,反向传播)神经网络[6 ] 、随机森林[7 ] 和极限学习机[8 ] 等.综上可知,结构解耦虽然原理简单,但会增加加工难度和制造成本;软件解耦虽能够有效降低制造成本,但运算复杂,易出现病态矩阵,导致精度降低.因此,设计一种运算简单、精确度高的六维力传感器解耦算法具有重要意义. ...
Stewart式六维力传感器轻量化设计
1
2022
... 随着科技的发展,智能机器人正加速融入工业生产和日常生活.六维力传感器作为实现智能机器人“触觉”的重要感知元件,得到了世界各国学者的广泛关注[1 ] .现阶段,六维力传感器主要包括电容型、压电型、光电型和应变片型等几种类型.但由于受到机械结构原理、机械加工误差、应变片粘贴位置以及系统标定方式的影响,任何类型的六维力传感器均会不可避免地产生耦合误差[2 -4 ] .在此前的研究中,减小耦合误差的方式主要有改变结构和材料、改善加工工艺等,即从根源上进行结构解耦.积木拼装式六维力传感器是最早开发的、最具有代表性的结构解耦式六维力传感器,其通过多个应变检测模块实现对不同力的检测,从而达到结构解耦的目的.但由于加工装配难度过大以及测量精度不理想,积木拼装式六维力传感器并没有得到广泛应用.与结构解耦相对应的是软件解耦,软件解耦是指采用合适的算法推导出六维力传感器输入值与输出值的关系.实现软件解耦的方法有2种:第1种是线性解耦,最常用的是最小二乘法[5 ] ;第2种是维间解耦,适用于线性解耦无法解决问题的场合,最常用的是机器学习算法,包括BP(back propagation,反向传播)神经网络[6 ] 、随机森林[7 ] 和极限学习机[8 ] 等.综上可知,结构解耦虽然原理简单,但会增加加工难度和制造成本;软件解耦虽能够有效降低制造成本,但运算复杂,易出现病态矩阵,导致精度降低.因此,设计一种运算简单、精确度高的六维力传感器解耦算法具有重要意义. ...
多维力传感器耦合分析及解耦方法的研究
1
2011
... 随着科技的发展,智能机器人正加速融入工业生产和日常生活.六维力传感器作为实现智能机器人“触觉”的重要感知元件,得到了世界各国学者的广泛关注[1 ] .现阶段,六维力传感器主要包括电容型、压电型、光电型和应变片型等几种类型.但由于受到机械结构原理、机械加工误差、应变片粘贴位置以及系统标定方式的影响,任何类型的六维力传感器均会不可避免地产生耦合误差[2 -4 ] .在此前的研究中,减小耦合误差的方式主要有改变结构和材料、改善加工工艺等,即从根源上进行结构解耦.积木拼装式六维力传感器是最早开发的、最具有代表性的结构解耦式六维力传感器,其通过多个应变检测模块实现对不同力的检测,从而达到结构解耦的目的.但由于加工装配难度过大以及测量精度不理想,积木拼装式六维力传感器并没有得到广泛应用.与结构解耦相对应的是软件解耦,软件解耦是指采用合适的算法推导出六维力传感器输入值与输出值的关系.实现软件解耦的方法有2种:第1种是线性解耦,最常用的是最小二乘法[5 ] ;第2种是维间解耦,适用于线性解耦无法解决问题的场合,最常用的是机器学习算法,包括BP(back propagation,反向传播)神经网络[6 ] 、随机森林[7 ] 和极限学习机[8 ] 等.综上可知,结构解耦虽然原理简单,但会增加加工难度和制造成本;软件解耦虽能够有效降低制造成本,但运算复杂,易出现病态矩阵,导致精度降低.因此,设计一种运算简单、精确度高的六维力传感器解耦算法具有重要意义. ...
多维力传感器耦合分析及解耦方法的研究
1
2011
... 随着科技的发展,智能机器人正加速融入工业生产和日常生活.六维力传感器作为实现智能机器人“触觉”的重要感知元件,得到了世界各国学者的广泛关注[1 ] .现阶段,六维力传感器主要包括电容型、压电型、光电型和应变片型等几种类型.但由于受到机械结构原理、机械加工误差、应变片粘贴位置以及系统标定方式的影响,任何类型的六维力传感器均会不可避免地产生耦合误差[2 -4 ] .在此前的研究中,减小耦合误差的方式主要有改变结构和材料、改善加工工艺等,即从根源上进行结构解耦.积木拼装式六维力传感器是最早开发的、最具有代表性的结构解耦式六维力传感器,其通过多个应变检测模块实现对不同力的检测,从而达到结构解耦的目的.但由于加工装配难度过大以及测量精度不理想,积木拼装式六维力传感器并没有得到广泛应用.与结构解耦相对应的是软件解耦,软件解耦是指采用合适的算法推导出六维力传感器输入值与输出值的关系.实现软件解耦的方法有2种:第1种是线性解耦,最常用的是最小二乘法[5 ] ;第2种是维间解耦,适用于线性解耦无法解决问题的场合,最常用的是机器学习算法,包括BP(back propagation,反向传播)神经网络[6 ] 、随机森林[7 ] 和极限学习机[8 ] 等.综上可知,结构解耦虽然原理简单,但会增加加工难度和制造成本;软件解耦虽能够有效降低制造成本,但运算复杂,易出现病态矩阵,导致精度降低.因此,设计一种运算简单、精确度高的六维力传感器解耦算法具有重要意义. ...
Design and fabrication of a six-dimensional wrist force/torque sensor based on E-type membranes compared to cross beams
1
2010
... 随着科技的发展,智能机器人正加速融入工业生产和日常生活.六维力传感器作为实现智能机器人“触觉”的重要感知元件,得到了世界各国学者的广泛关注[1 ] .现阶段,六维力传感器主要包括电容型、压电型、光电型和应变片型等几种类型.但由于受到机械结构原理、机械加工误差、应变片粘贴位置以及系统标定方式的影响,任何类型的六维力传感器均会不可避免地产生耦合误差[2 -4 ] .在此前的研究中,减小耦合误差的方式主要有改变结构和材料、改善加工工艺等,即从根源上进行结构解耦.积木拼装式六维力传感器是最早开发的、最具有代表性的结构解耦式六维力传感器,其通过多个应变检测模块实现对不同力的检测,从而达到结构解耦的目的.但由于加工装配难度过大以及测量精度不理想,积木拼装式六维力传感器并没有得到广泛应用.与结构解耦相对应的是软件解耦,软件解耦是指采用合适的算法推导出六维力传感器输入值与输出值的关系.实现软件解耦的方法有2种:第1种是线性解耦,最常用的是最小二乘法[5 ] ;第2种是维间解耦,适用于线性解耦无法解决问题的场合,最常用的是机器学习算法,包括BP(back propagation,反向传播)神经网络[6 ] 、随机森林[7 ] 和极限学习机[8 ] 等.综上可知,结构解耦虽然原理简单,但会增加加工难度和制造成本;软件解耦虽能够有效降低制造成本,但运算复杂,易出现病态矩阵,导致精度降低.因此,设计一种运算简单、精确度高的六维力传感器解耦算法具有重要意义. ...
Design and optimization of a novel six-axis force/torque sensor for space robot
1
2015
... 现阶段,六维力传感器的结构主要分为一体式和并联式.一体式六维力传感器由金属材料经一次加工形成,通过布置在空间内不同方位的应变片组合来确定六维外力.一体式六维力传感器的结构形式有多种[9 -13 ] ,其中十字梁结构的六维力传感器(见图1 )最为常用.但是,由于一体式六维力传感器的结构具有整体性,当对其某一方向施加外力时,会引起其他方向力的耦合,即形成维间耦合误差,无法实现完全解耦.并联式六维力传感器采用球铰连接的方式,其测力分支可看作只承受轴向力的二力杆.由机构的静力学分析可知,当将外力施加到并联式六维力传感器上时,其测量分支上的敏感元件之间不存在应力耦合,巧妙地实现了结构解耦.但在实际应用中,完全理想的球铰不易实现,通常采用传统球副代替,但传统球副存在加工误差、理论间隙和摩擦转矩等,导致并联式六维力传感器也存在维间耦合.此外,并联式六维力传感器的自身结构也是引起维间耦合的重要因素.如图2 所示的Stewart并联结构六维力传感器,其所受的任何方向的力或力矩均由6个测力分支测得,当所受外力为单方向时,6个测力分支均只承受轴向力.结合一阶静力学矩阵可知,该六维力传感器在所有方向上均存在测量值,即自身结构造成了耦合误差. ...
Six-DOF micro-manipulator based on compliant parallel mechanism with integrated force sensor
0
2011
并联结构六维力传感器及其超静定静力映射解析分析
0
2014
并联结构六维力传感器及其超静定静力映射解析分析
0
2014
A force/position measurement method of surgical forceps based on fiber Bragg gratings
1
2023
... 现阶段,六维力传感器的结构主要分为一体式和并联式.一体式六维力传感器由金属材料经一次加工形成,通过布置在空间内不同方位的应变片组合来确定六维外力.一体式六维力传感器的结构形式有多种[9 -13 ] ,其中十字梁结构的六维力传感器(见图1 )最为常用.但是,由于一体式六维力传感器的结构具有整体性,当对其某一方向施加外力时,会引起其他方向力的耦合,即形成维间耦合误差,无法实现完全解耦.并联式六维力传感器采用球铰连接的方式,其测力分支可看作只承受轴向力的二力杆.由机构的静力学分析可知,当将外力施加到并联式六维力传感器上时,其测量分支上的敏感元件之间不存在应力耦合,巧妙地实现了结构解耦.但在实际应用中,完全理想的球铰不易实现,通常采用传统球副代替,但传统球副存在加工误差、理论间隙和摩擦转矩等,导致并联式六维力传感器也存在维间耦合.此外,并联式六维力传感器的自身结构也是引起维间耦合的重要因素.如图2 所示的Stewart并联结构六维力传感器,其所受的任何方向的力或力矩均由6个测力分支测得,当所受外力为单方向时,6个测力分支均只承受轴向力.结合一阶静力学矩阵可知,该六维力传感器在所有方向上均存在测量值,即自身结构造成了耦合误差. ...
大量程六维力传感器设计与标定研究
1
2016
... 线性解耦算法是最常见的六维力传感器解耦算法,其实现前提为:1)假定六维力传感器系统为线性系统;2)六维力传感器所受的广义外力必须可分解为3个方向上的力/力矩分量;3)六维力传感器输出的电压信号可以相互累加.线性解耦算法的工作原理为:通过对输入量和输出量进行线性拟合,进而得到标定矩阵[14 -15 ] .采用矩阵形式可表示为: ...
大量程六维力传感器设计与标定研究
1
2016
... 线性解耦算法是最常见的六维力传感器解耦算法,其实现前提为:1)假定六维力传感器系统为线性系统;2)六维力传感器所受的广义外力必须可分解为3个方向上的力/力矩分量;3)六维力传感器输出的电压信号可以相互累加.线性解耦算法的工作原理为:通过对输入量和输出量进行线性拟合,进而得到标定矩阵[14 -15 ] .采用矩阵形式可表示为: ...
基于时间函数的并联六维力传感器量程设计
1
2016
... 线性解耦算法是最常见的六维力传感器解耦算法,其实现前提为:1)假定六维力传感器系统为线性系统;2)六维力传感器所受的广义外力必须可分解为3个方向上的力/力矩分量;3)六维力传感器输出的电压信号可以相互累加.线性解耦算法的工作原理为:通过对输入量和输出量进行线性拟合,进而得到标定矩阵[14 -15 ] .采用矩阵形式可表示为: ...
基于时间函数的并联六维力传感器量程设计
1
2016
... 线性解耦算法是最常见的六维力传感器解耦算法,其实现前提为:1)假定六维力传感器系统为线性系统;2)六维力传感器所受的广义外力必须可分解为3个方向上的力/力矩分量;3)六维力传感器输出的电压信号可以相互累加.线性解耦算法的工作原理为:通过对输入量和输出量进行线性拟合,进而得到标定矩阵[14 -15 ] .采用矩阵形式可表示为: ...
Similitude analysis method of the dynamics of a hybrid spray-painting robot considering electro-mechanical coupling effect
1
2021
... 以提高六维力传感器的精度为目的,提出了基于多项式拟合的解耦算法.为了消除六维力传感器工作时零值点不为0的现象对其精度的影响[16 ] ,通过调控将其空载状态下的输出值设为0.此时,耦合矩阵H




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}